Пристрій для формування команд керування по шляху переміщення рухомого об’єкта
Формула / Реферат
1. Устройство формирования путевых команд управления подвижным объектом, содержащее датчик путевых импульсов, соединенный с реверсивным счетчиком, усилитель, узел программирования, отличающееся тем, что в него введены датчик конечного положения подвижного объекта и, соответственно количеству формируемых команд, блоки формирования путевых команд, каждый из которых содержит реверсивный счетчик, узел программирования и усилитель причем выходы датчика путевых импульсов соединены со входами счета и его направления- реверсивных счетчиков, со входами разрешения предустановки которых соединен выход датчика конечного положения подвижного объекта, со входами предварительной установки - выходы соответствующих узлов программирования, а выход старшего разряда каждого счетчика - с соответствующими усилителями, выходы которых являются выходом устройства.
2. Устройство по п. отличающееся тем, что объем каждого реверсивного счетчика Nсч.макс и максимально возможное количество входных путевых импульсов Мвх.макс датчика, соответствующее максимальному перемещению подвижного объекта, находяїся в соотношении Nвх.макс < 0,5 Ncч.макс.
Текст
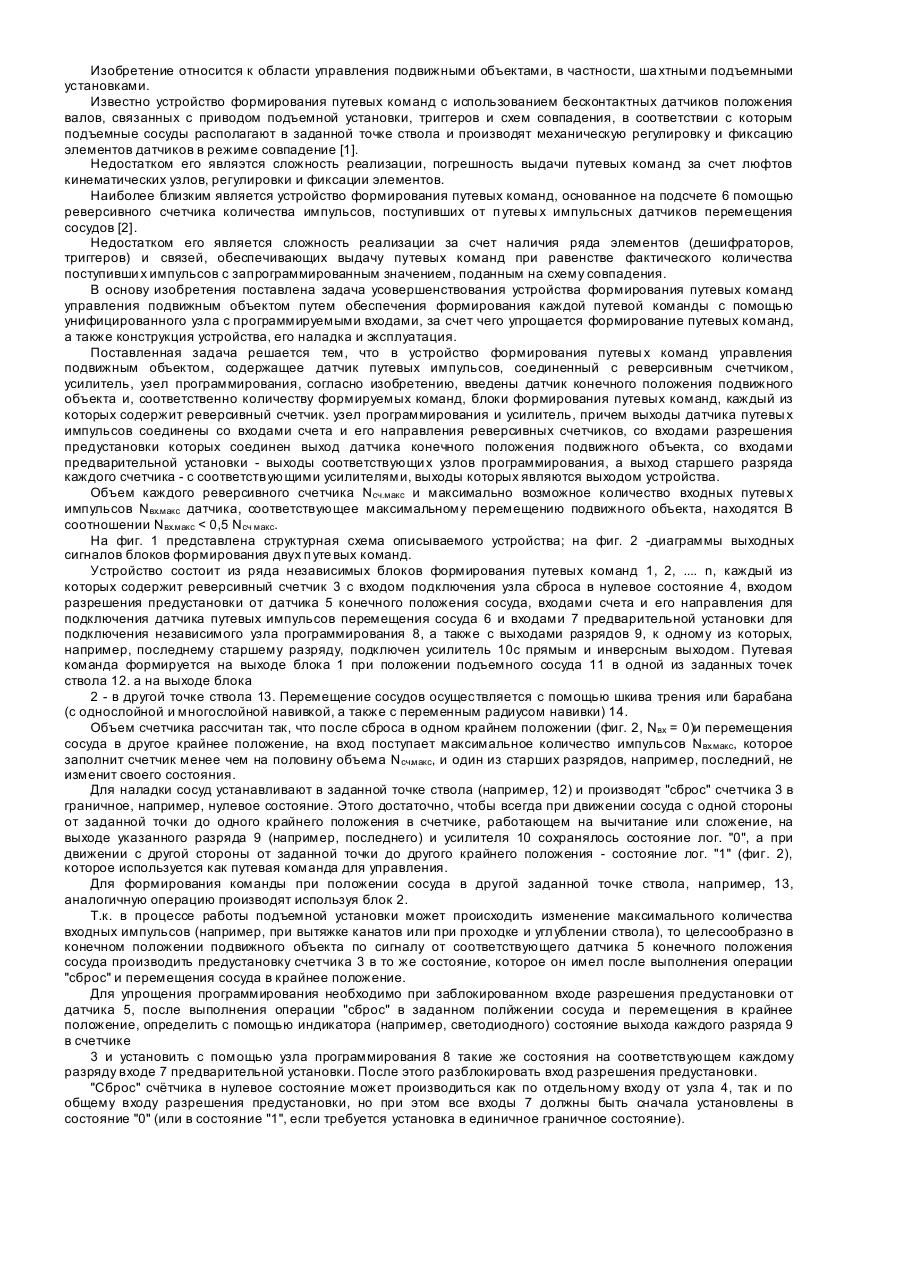
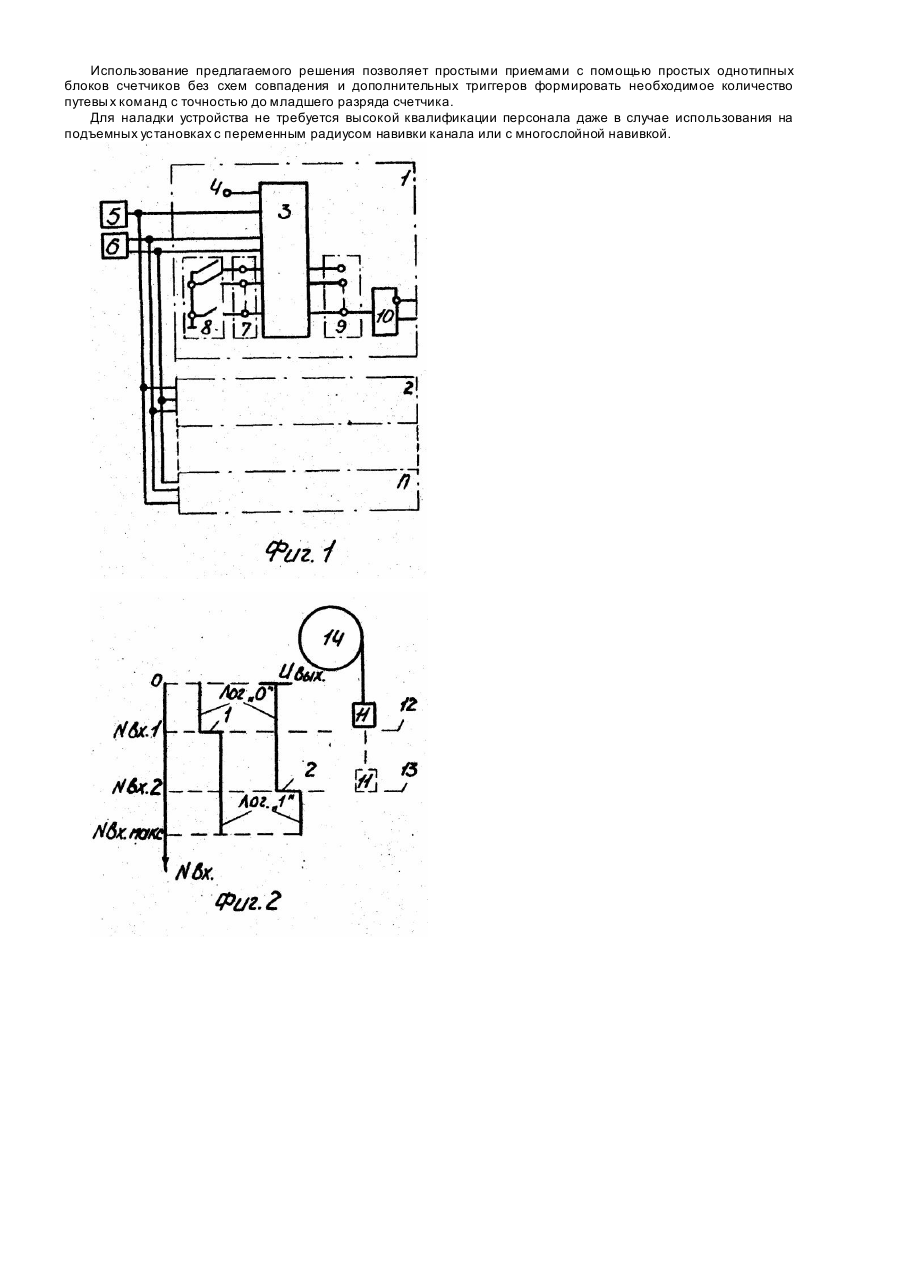
Изобретение относится к области управления подвижными объектами, в частности, ша хтными подъемными установками. Известно устройство формирования путевых команд с использованием бесконтактных датчиков положения валов, связанных с приводом подъемной установки, триггеров и схем совпадения, в соответствии с которым подъемные сосуды располагают в заданной точке ствола и производят механическую регулировку и фиксацию элементов датчиков в режиме совпадение [1]. Недостатком его являэтся сложность реализации, погрешность выдачи путевых команд за счет люфтов кинематических узлов, регулировки и фиксации элементов. Наиболее близким является устройство формирования путевых команд, основанное на подсчете 6 помощью реверсивного счетчика количества импульсов, поступивших от п утевы х импульсных датчиков перемещения сосудов [2]. Недостатком его является сложность реализации за счет наличия ряда элементов (дешифраторов, триггеров) и связей, обеспечивающих выдачу путевых команд при равенстве фактического количества поступивши х импульсов с запрограммированным значением, поданным на схему совпадения. В основу изобретения поставлена задача усовершенствования устройства формирования путевых команд управления подвижным объектом путем обеспечения формирования каждой путевой команды с помощью унифицированного узла с программируемыми входами, за счет чего упрощается формирование путевых команд, а также конструкция устройства, его наладка и эксплуатация. Поставленная задача решается тем, что в устройство формирования путевы х команд управления подвижным объектом, содержащее датчик путевых импульсов, соединенный с реверсивным счетчиком, усилитель, узел программирования, согласно изобретению, введены датчик конечного положения подвижного объекта и, соответственно количеству формируемых команд, блоки формирования путевых команд, каждый из которых содержит реверсивный счетчик. узел программирования и усилитель, причем выходы датчика путевы х импульсов соединены со входами счета и его направления реверсивных счетчиков, со входами разрешения предустановки которых соединен выход датчика конечного положения подвижного объекта, со входами предварительной установки - выходы соответствующи х узлов программирования, а выход старшего разряда каждого счетчика - с соответствующими усилителями, выходы которых являются выходом устройства. Объем каждого реверсивного счетчика Nсч.макс и максимально возможное количество входных путевы х импульсов Nвх.макс датчика, соответствующее максимальному перемещению подвижного объекта, находятся В соотношении Nвх.макс < 0,5 N cч макс. На фиг. 1 представлена структурная схема описываемого устройства; на фиг. 2 -диаграммы выходных сигналов блоков формирования двух п уте вых команд. Устройство состоит из ряда независимых блоков формирования путевых команд 1, 2, .... n, каждый из которых содержит реверсивный счетчик 3 с входом подключения узла сброса в нулевое состояние 4, входом разрешения предустановки от датчика 5 конечного положения сосуда, входами счета и его направления для подключения датчика путевых импульсов перемещения сосуда 6 и входами 7 предварительной установки для подключения независимого узла программирования 8, а также с выходами разрядов 9, к одному из которых, например, последнему старшему разряду, подключен усилитель 10с прямым и инверсным выходом. Путевая команда формируется на выходе блока 1 при положении подъемного сосуда 11 в одной из заданных точек ствола 12. а на выходе блока 2 - в другой точке ствола 13. Перемещение сосудов осуществляется с помощью шкива трения или барабана (с однослойной и многослойной навивкой, а также с переменным радиусом навивки) 14. Объем счетчика рассчитан так, что после сброса в одном крайнем положении (фиг. 2, Nвx = 0)и перемещения сосуда в другое крайнее положение, на вход поступает максимальное количество импульсов Nвх.макс, которое заполнит счетчик менее чем на половину объема N сч.макс, и один из старших разрядов, например, последний, не изменит своего состояния. Для наладки сосуд устанавливают в заданной точке ствола (например, 12) и производят "сброс" счетчика 3 в граничное, например, нулевое состояние. Этого достаточно, чтобы всегда при движении сосуда с одной стороны от заданной точки до одного крайнего положения в счетчике, работающем на вычитание или сложение, на выходе указанного разряда 9 (например, последнего) и усилителя 10 сохранялось состояние лог. "0", а при движении с другой стороны от заданной точки до другого крайнего положения - состояние лог. "1" (фиг. 2), которое используется как путевая команда для управления. Для формирования команды при положении сосуда в другой заданной точке ствола, например, 13, аналогичную операцию производят используя блок 2. Т.к. в процессе работы подъемной установки может происходить изменение максимального количества входных импульсов (например, при вытяжке канатов или при проходке и углублении ствола), то целесообразно в конечном положении подвижного объекта по сигналу от соответствующего датчика 5 конечного положения сосуда производить предустановку счетчика 3 в то же состояние, которое он имел после выполнения операции "сброс" и перемещения сосуда в крайнее положение. Для упрощения программирования необходимо при заблокированном входе разрешения предустановки от датчика 5, после выполнения операции "сброс" в заданном полйжении сосуда и перемещения в крайнее положение, определить с помощью индикатора (например, светодиодного) состояние выхода каждого разряда 9 в счетчике 3 и установить с помощью узла программирования 8 такие же состояния на соответствующем каждому разряду входе 7 предварительной установки. После этого разблокировать вход разрешения предустановки. "Сброс" счётчика в нулевое состояние может производиться как по отдельному входу от узла 4, так и по общему входу разрешения предустановки, но при этом все входы 7 должны быть сначала установлены в состояние "0" (или в состояние "1", если требуется установка в единичное граничное состояние). Использование предлагаемого решения позволяет простыми приемами с помощью простых однотипных блоков счетчиков без схем совпадения и дополнительных триггеров формировать необходимое количество путевы х команд с точностью до младшего разряда счетчика. Для наладки устройства не требуется высокой квалификации персонала даже в случае использования на подъемных установках с переменным радиусом навивки канала или с многослойной навивкой.
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for formation of control commands on the way of displacement of mobileobject
Автори англійськоюKlymenko Vitalii Vasyliovych
Назва патенту російськоюУстройство для формирования команд управления по пути перемещения подвижного объекта
Автори російськоюКлименко Виталий Васильевич
МПК / Мітки
МПК: B66B 1/34
Мітки: шляху, формування, пристрій, об'єкта, переміщення, керування, команд, рухомого
Код посилання
<a href="https://ua.patents.su/2-1715-pristrijj-dlya-formuvannya-komand-keruvannya-po-shlyakhu-peremishhennya-rukhomogo-obehkta.html" target="_blank" rel="follow" title="База патентів України">Пристрій для формування команд керування по шляху переміщення рухомого об’єкта</a>
Спосіб передачі та прийому команд управління по проводах трифазної мережі соколова в.ф.
Номер патенту: 1080
Опубліковано: 30.12.1993
Автор: Соколов Вячеслав Федорович
МПК: G08C 19/02
Мітки: трифазної, управління, мережі, в.ф, передачі, проводах, соколова, прийому, команд, спосіб
Формула / Реферат:
Ф о р м у л а и з о б р е т е н и я Способ передачи и приема команд управления по проводам трехфазной сети, основанный на формировании команды управления из сигнала заданной полуволны напряжения переменного тока в одном из фазных проводов трехфазной сети, передаче команды управления по одному из фазных проводов трехфазной сети, приеме команды управления и преобразовании ее в сигнал управления исполнительным элементом, о т л и ч а ю щ...
Пристрій для формування залишків по модулю
Номер патенту: 612
Опубліковано: 15.12.1993
Автор: Черкаський Микола Вячеславович
МПК: H03M 7/14
Мітки: пристрій, формування, модулю, залишків
Формула / Реферат:
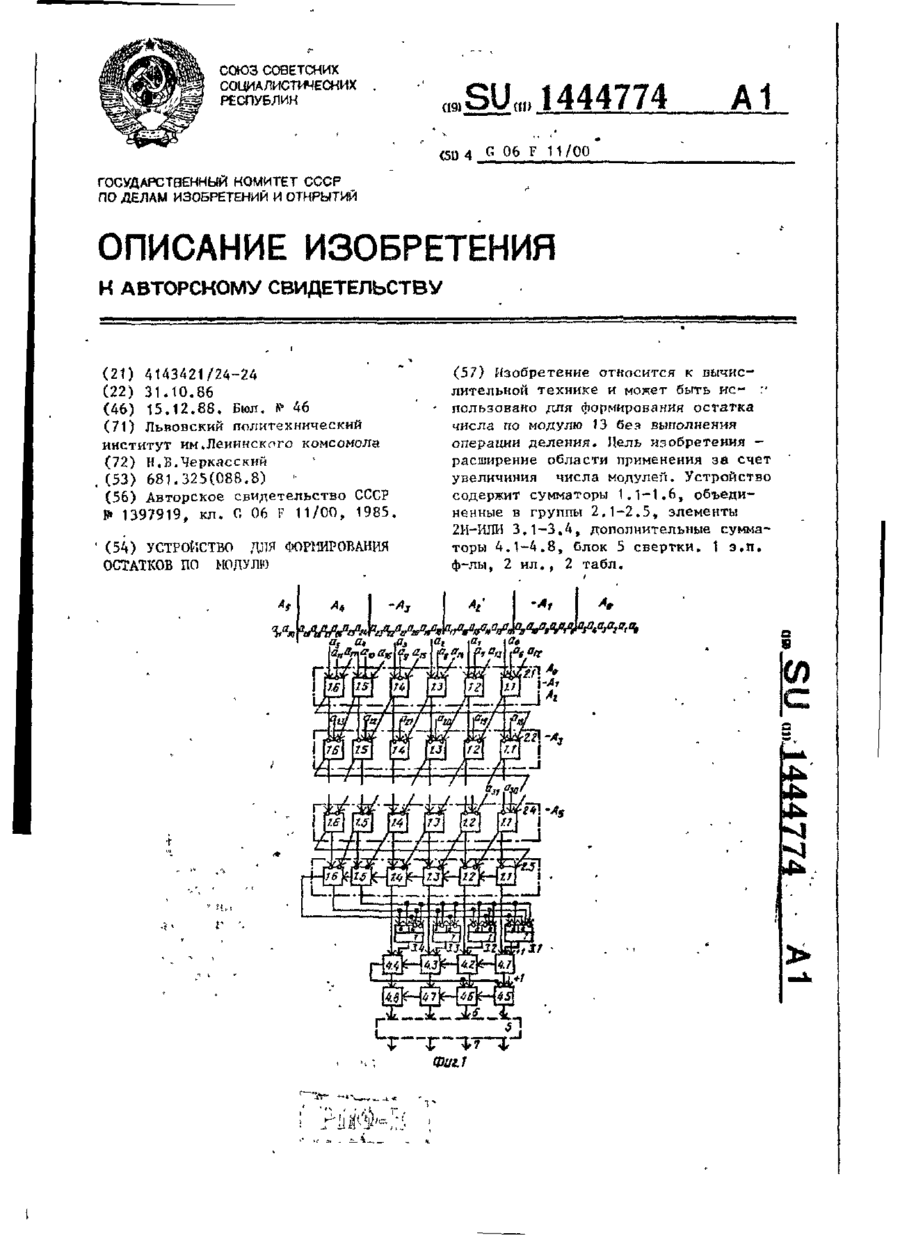
Формула изобретения1. Устройство для формирования остатков по модулю, содержащее (1-1) групп одноразрядных сумматоров (1= n/q, где n - разрядность числа, q - число сумматоров в группах) и блок свертки, причем прямые входы первого слагаемого одноразрядных сумматоров і-й группы (I = 1 - 1 - 1) соединены с входами соответствующих разрядов (і+1)-й группы информационного входа устройства, выход переноса к-го одноразрядного сумматора і-й...
Пристрій для формування залишків по модулю
Номер патенту: 614
Опубліковано: 15.12.1993
Автор: Черкаський Микола Вячеславович
МПК: G06F 7/60, G06F 11/00
Мітки: залишків, модулю, формування, пристрій
Формула / Реферат:
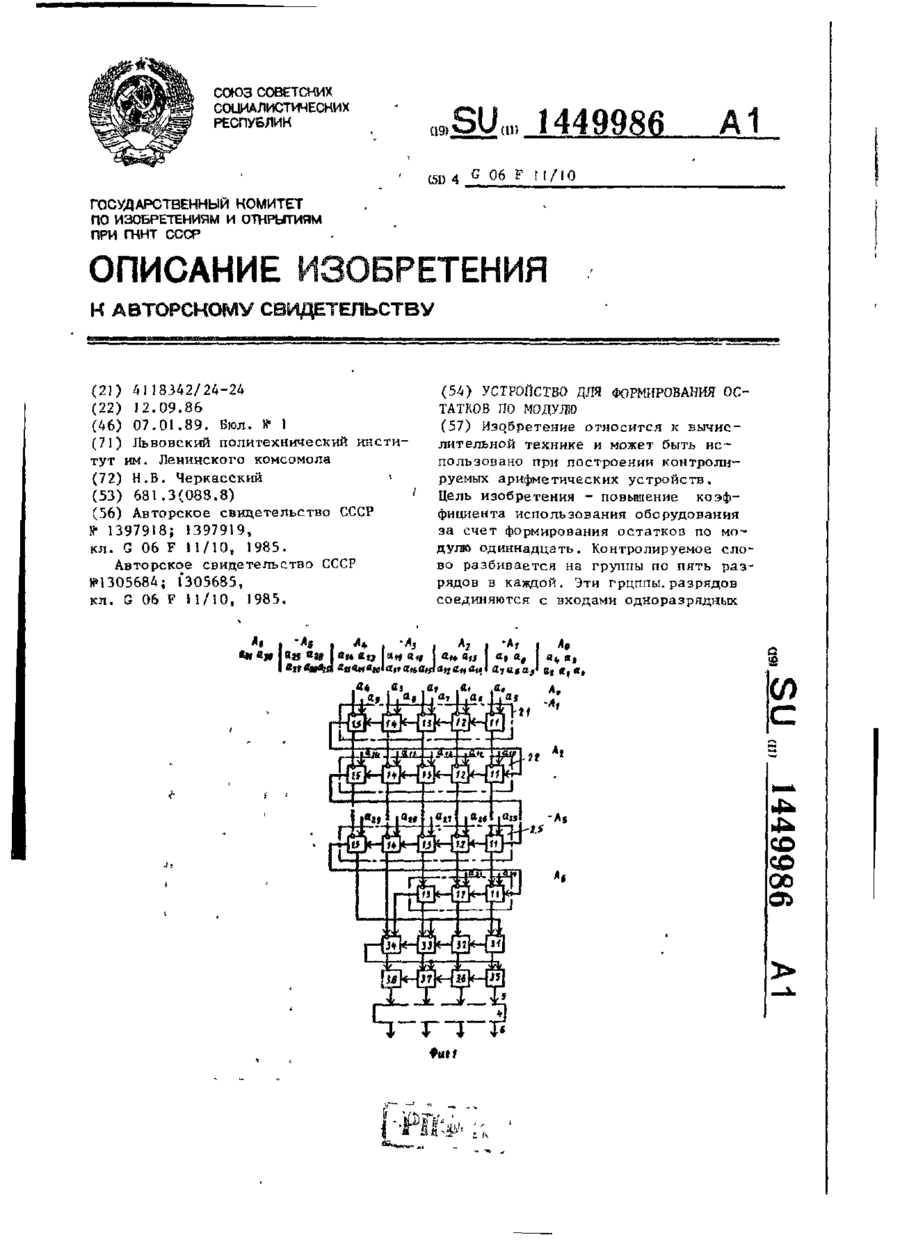
Формула изобретения1. Устройство для формирования остатков по модулю, содержащее 1-1 группу сумматоров (1 = n/q, n - разрядность числа, q - число сумматоров в группе) и блок свертки, выходы которого являются выходами устройства, прямые входы первого слагаемого и входы переноса сумматоров первой группы являются первой, второй и третьей группами информационного входов устройства, прямые входы первого слагаемого сумматоров (і-й группы. (і...
Спосіб дістанційного керування рухомим об’єктом та пристрій для його здійснення
Номер патенту: 1733
Опубліковано: 25.10.1994
Автор: Сімікін Костянтин Михайлович
МПК: A63H 23/00, A63H 29/00
Мітки: рухомим, об'єктом, здійснення, дистанційного, керування, спосіб, пристрій
Формула / Реферат:
1. Способ дистанционного управлення подвижным объектом, заключающийся в том, что на постоянный магнит объекта воздействуют управляющим полем электромагнита, отличающийся тем, что, с целью повышения игрового эффекта, управляющее магнитное поле формируют плоским и коммутируют его в направлениях, перпендикулярных одно другому, а ось намагниченности постоянного объекта ориентируют ортогонально плоскости управляющего магнитного поля. 2....
Пристрій для формування залишків по модулю
Номер патенту: 617
Опубліковано: 15.12.1993
Автор: Черкаський Микола Вячеславович
МПК: G06F 11/10, G06F 7/60
Мітки: формування, модулю, залишків, пристрій
Формула / Реферат:
Формула изобретенияУстройство для формирования остатков по модулю, содержащее (1-1) группу одноразрядных сумматоров ( , где n - разрядность числа, q - число одноразрядных сумматоров в группе) и блок свертки, содержащий группу одноразрядных сумматоров, причем инверсные входы первого слагаемого и прямые входы второго слагаемого одноразрядных сумматоров первой группы соединены с...
Попередній патент: Пристрій для термічного руйнування гірничих порід
Наступний патент: Пристрій для змащення зубчатих передач з вертикальним розміщенням валів
Випадковий патент: Спосіб дистанційного визначення характеристик морської поверхні