Вантажнозахватний пристрій
Номер патенту: 2200
Опубліковано: 26.12.1994
Автори: Сопільняк Юрій Павлович, Богомольний Леонід Михайлович
Формула / Реферат
Грузозахватное устройство, содержащее связанные механизмом фиксации траверсу, присоединяемую подвеской к крюку подъемной машины и раму с наклонными направляющими, в которых установлены с возможностью перемещения каретки, закрепленные на верхних частях захватных органов, включающих полые вертикальные стойки, в верхней части которых связаны гибкими тягами с траверсой, а короткие кинематически связаны с лапами, шарнирно установленными в нижней части вертикальных стоек, отличающееся тем, что, с целью повышения надежности, кинематическая связь выполнена в виде упорных стержней с вертикальными выступами в верхней части, установленных в полых вертикальных стойках с возможностью ограниченного перемещения и фиксации, нижние части которых шарнирно связаны с лапами, а короткие плечи двуплечих рычагов выполнены с контактными поверхностями для взаимодействия с вертикальными выступами упорных стержней.
Текст
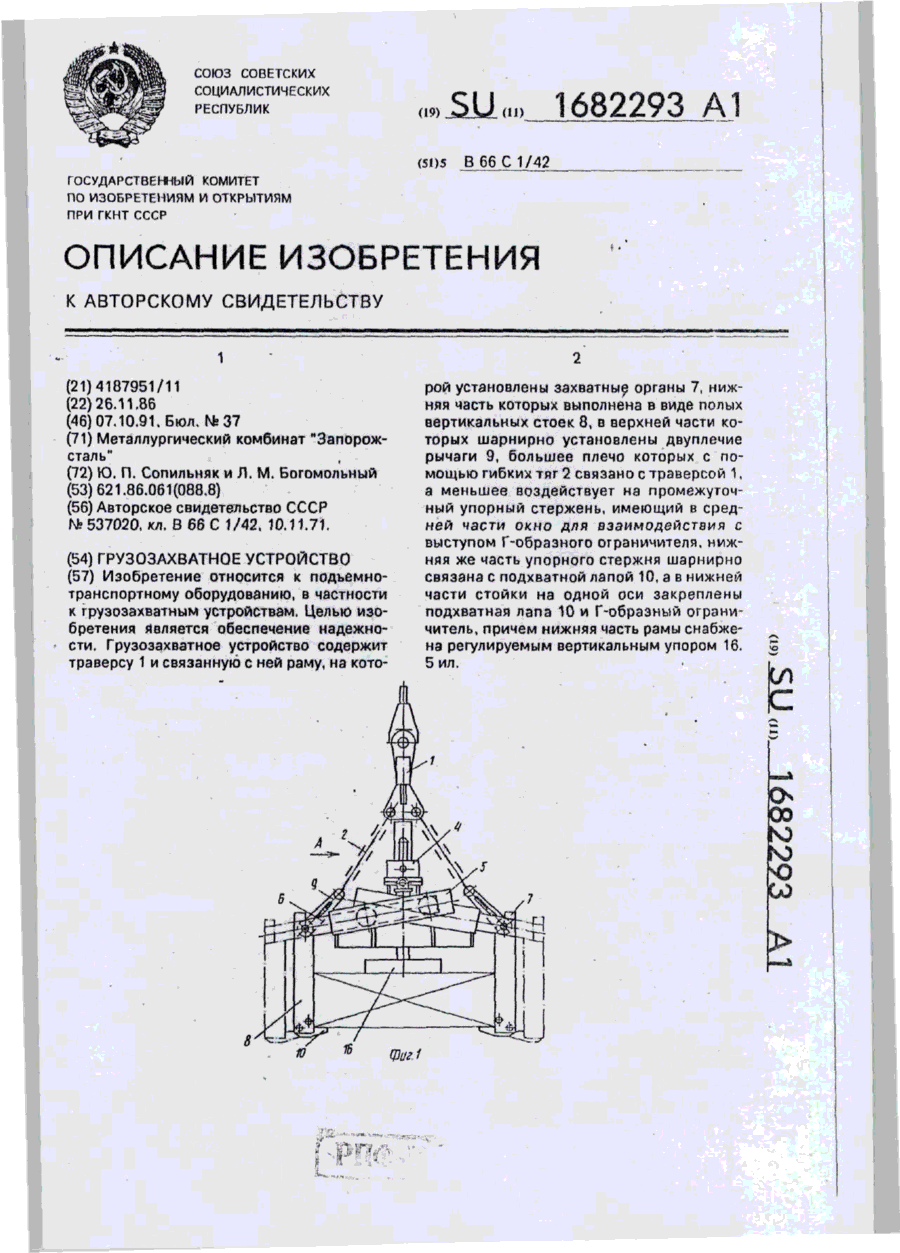
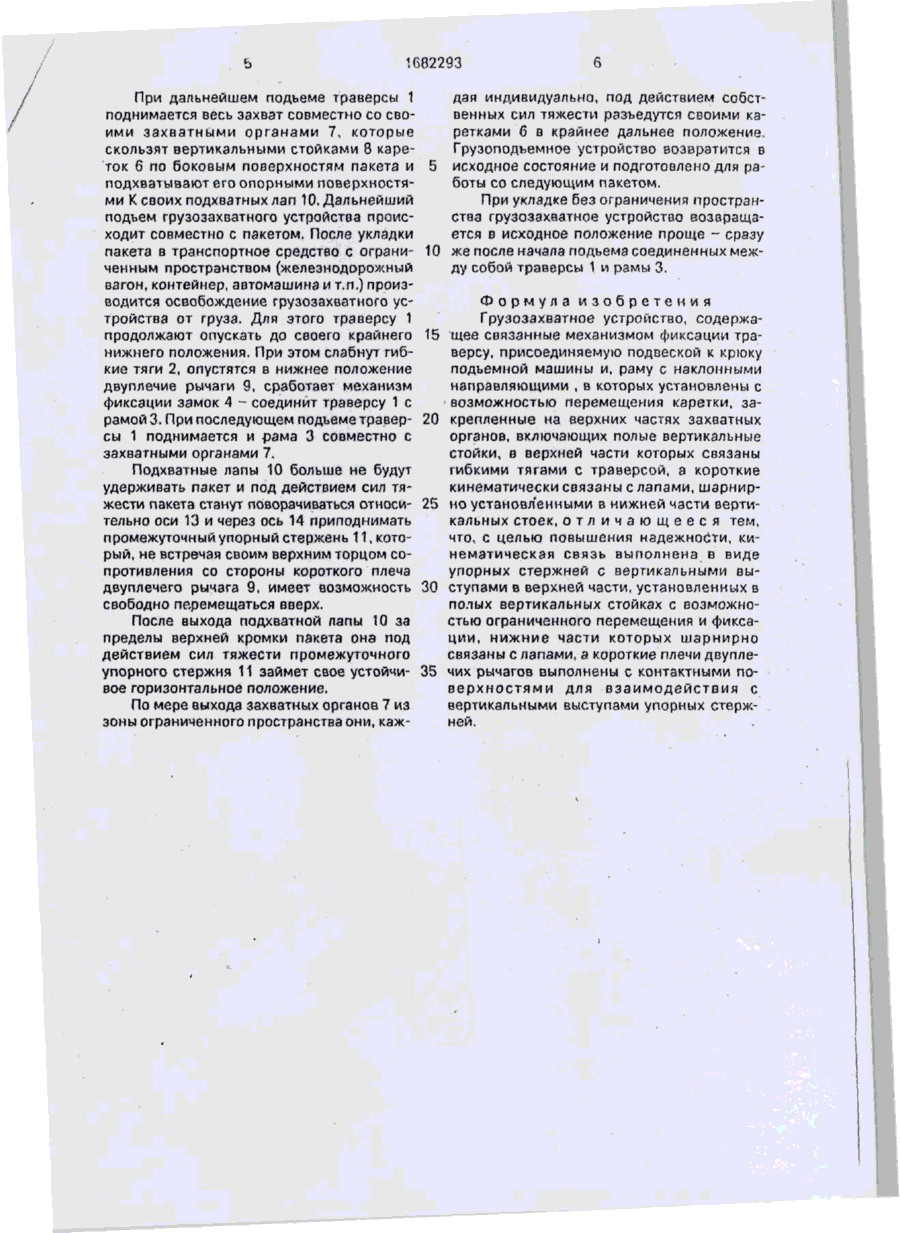
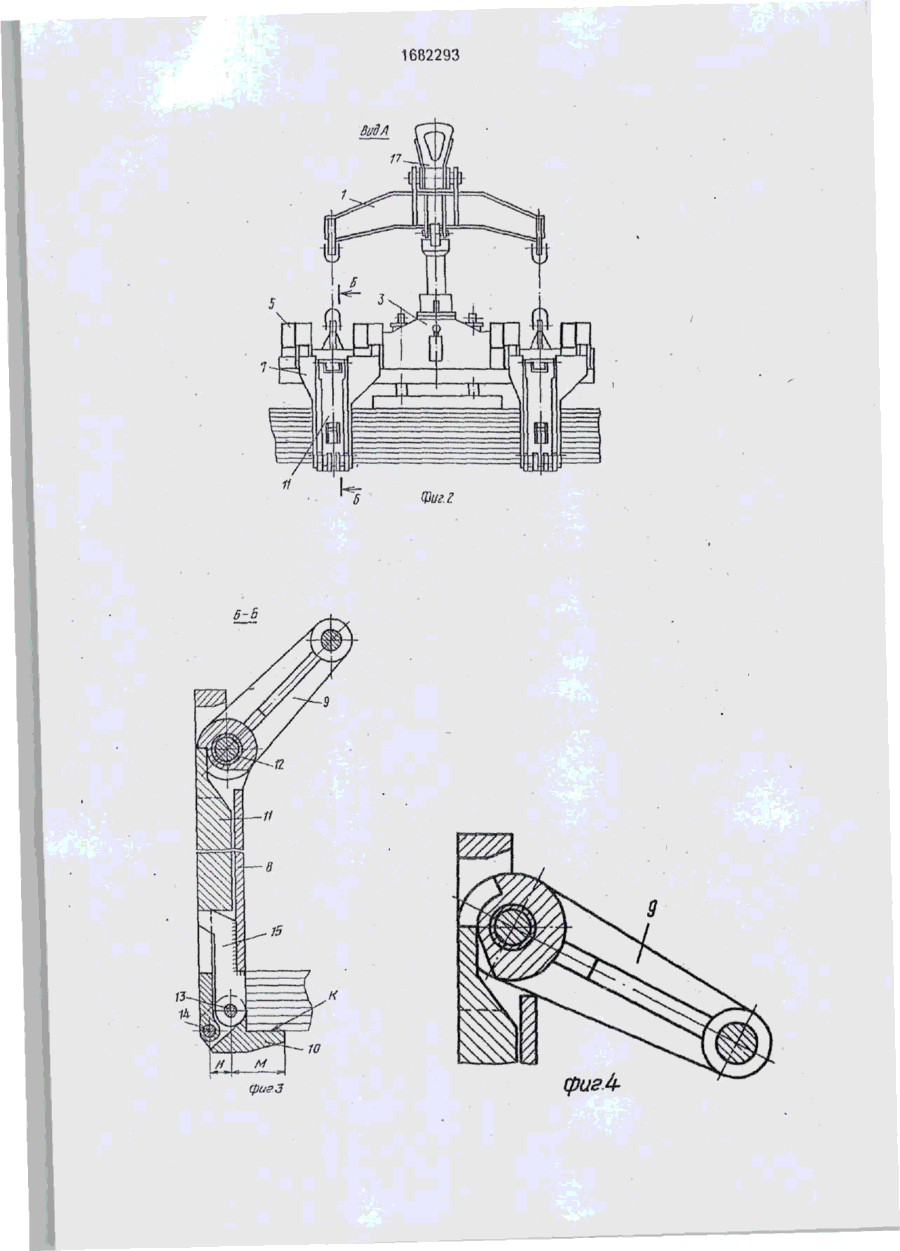
Изобретение относится к подъемнотранспортному оборудованию, в частности к грузозахватным устройствам. Целью изобретения является обеспечение надежности. Грузозахватное устройство содержит траверсу 1 и связанную с ней раму, на кото Фиг і пі -. л 1682293 Изобретение относится к подъемнотранспортной технике, а именно к грузозахватным устройствам. для навески на крюк грузоподъемного механизма. Перед установкой грузозахватного устройства на пакет все элементы механизма находятся в исходном положении: траверса 1 и рама 3 соединены между собой посредством замка 4, гибкие тяги 2 ослаблены, все подвижные захватные органы 7, опирающиеся своими каретками 6 на наклонные направляющие 5 рамы 3, находятся в своем крайнем дальнем от оси захвата положения, двуплечие рычаги 9 каждого захватного органа 7 опущены занимают свое нижнее положение, промежуточные упорные стержни 11 каждого захватного органа 7 находятся в своем устойчивом положении - опираются на ограничители 15 вертикальных стоек 8, опорные поверхности К всех подхватных лап 10 располагаются горизонтально, регулируемый вертикальный упор 16 находится в крайнем верхнем положении. Грузозахватное устройство способно брать пакеты с пола и со стопы. Цель изобретения - повышение надеж- 5 ности. На фиг. 1 изображено грузозахватное устройство; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез Б~Б на фиг. 2 (состояние нагружения); на фиг. 4 - двуплечий рычаг в 10 состоянии покоя; на фиг. 5 - подхватная лапа в состоянии выхода из-под груза. Грузозахватное устройство содержит траверсу 1 с гибкими тягами 2 и раму 3, связанные между собой посредством меха- 15 низма фиксации взаимных положений замка 4. В конструкцию рамы 3 входят коробчатые наклонные направляющие 5, в которых с возможностью перемещения располагаются каретки 6 подвижных за- 20 хватных органов 7, имеющие полые вертикальные стойки 8. В полости вертикальной стойки 8 каретки 6 каждого захватного органа 7 размещены двуплечий рычаг 9, подхватная лапа 10 и промежуточный упорный 25 При работе с пола, когда грузозахватстержень 11. ное устройство должно устанавливаться непосредственно на пол, регулировка Двуплечий рычаг 9, установленный на вертикального упора 16 не требуется. оси 12 в верхней части стойки 8, соединенный своим большим плечом с одной из гибПри работе со стопы грузозахватное уских тяг 2 траверсы 1, имеет возможность 30 тройство опирается на верхний пакет стопы поворачиваться в вертикальной плоскости и регулировкой вертикального упора 16 дои занимать в процессе работы два положестигается его положение, когда опорния: верхнее - при натянутых гибких тягах ные поверхности К подхватных лап 10 2, обеспечивающее грузодержание (фиг. располагаются на уровне зазора между 3), нижнее- при ослабленных гибких тягах 35 пакетами. 2, занимаемое благодаря собственным неВ любом случае работа грузозахватноуравновешенным силам тяжести (фиг. 4). го устройства в автоматическом р.ежиме Подхватная лапа 10 с опорной поверхноодинакова и выполняется следующим обстью К, имеющая активное плечо М и реакразом. тивное Н, установленная на оси 13 в 40 После ориентирования и опускания грунижней части стойки 8, также имеет воззозахватного устройства на пакет механизм можность поворачиваться в вертикальной фиксации - замок 4 срабатывает при опираплоскости. ний рамы 3 (возможно через регулируемый вертикальный упор 16) на пакет или при ее Промежуточный упорный стержень 11, подвижный в вертикальной плоскости, рас- 45 установке подхватными лапами 10 на пол цеха, При этом траверса 1 расцепляется с положенный между двуплечим рычагом 9 и рамой 3. подхватной лапой 10, соединен шарнирно своим нижним концом осью 14 с реактивПри последующем подъеме траверсы 1 ным плечом Н подхватной лапы 10 и обрагибкие тяги 1 натягиваются и каждая повозует совместно с ней неуравновешенную 50 рачивает свой двуплечий рычаг 9 относисистему, устойчивое положение которой тельно оси 12 до упора его короткого плеча обеспечивается наличием Г-образного ограв верхнийторец промежуточного упорного ничителя 15 на вертикальной стойке 8, котозвена 11, после чего при продолжающемся рый взаимодействует своим выступом с подьеме траверсы I захватные органы 7 окном упорного стержня. ' Z съезжаются, перемещаясь своими каретками 6 в направляющих 5 рамы 3 до конДля работы с пакетами разной высоть такта вертикальных стоек 8 кареток 6 с в условиях их содержания в стопах грузобоковыми краями пакета ~ все активные захватное устройство снабжено регулируплечи М подхватных лап 10 зайдут под паемым вертикальным упором 16. В верхней кет. части траверсы 1 установлена подвеска 17 1682293 При дальнейшем подъеме траверсы 1 поднимается весь захват совместно со своими захватными органами 7, которые скользят вертикальными стойками 8 кареток 6 по боковым поверхностям пакета и подхватывают его опорными поверхностями К своих подхватных лап 10. Дальнейший подъем грузозахватного устройства происходит совместно с пакетом. После укладки пакета в транспортное средство с ограниценным пространством (железнодорожный вагон, контейнер, автомашина и т.п.) производится освобождение грузозахватного устройства от груза. Для этого траверсу 1 продолжают опускать до своего крайнего нижнего положения. При этом слабнут гибкие тяги 2, опустятся в нижнее положение двуплечие рычаги 9, сработает механизм фиксации замок 4 - соединит траверсу 1 с рамой 3. При последующем подъеметраверсы 1 поднимается и рама 3 совместно с захватными органами 7. дая индивидуально, под действием собственных сил тяжести разъедутся своими каретками б в крайнее дальнее положение. Грузоподъемное устройство возвратится в 5 исходное состояние и подготовлено для работы со следующим пакетом. При укладке без ограничения пространства грузозахватное устройство возвращается в исходное положение проще - сразу 10 же после начала подъема соединенных между собой траверсы 1 и рамы 3. 15 20 Подхватные лапы 10 больше не будут удерживать пакет и под действием сил тяжести пакета станут поворачиваться относи- 25 тельно оси 13 и через ось 14 приподнимать промежуточный упорный стержень 11, который, не встречая своим верхним торцом сопротивления со стороны короткого плеча двуплечего рычага 9, имеет возможность 30 свободно перемещаться вверх. После выхода подхватной лапы 10 за пределы верхней кромки пакета она под действием сил тяжести промежуточного упорного стержня 11 займет свое устойчи- 35 вое горизонтальное положение. По мере выхода захватных органов 7 из зоны ограниченного пространства они, каж Формула изобретения Грузозахватное устройство, содержащее связанные механизмом фиксации траверсу, присоединяемую подвеской к крюку подъемной машины и, раму с наклонными направляющими , в которых установлены с возможностью перемещения каретки, закрепленные на верхних частях захватных органов, включающих полые вертикальные стойки, в верхней части которых связаны гибкими тягами с траверсой, а короткие кинематически связаны с лапами, шарнирно установл'енными в нижней части вертикальных стоек, о т л и ч а ю щ е е с я тем, что, с целью повышения надежности, кинематическая связь выполнена в виде упорных стержней с вертикальными выступами в верхней части, установленных в полых вертикальных стойках с возможностью ограниченного перемещения и фиксации, нижние части которых шарнирно связаны с лапами, а короткие плечи двуплечих рычагов выполнены с контактными поверхностями для взаимодействия с вертикальными выступами упорных стержней. 1682293 Вид A 6-В К 10 фаеЗ фигЛ 1682293 (риг 5 Редактор Н. Тупица Составитель Н. Нарышкина Техред М.Моргентал Корректор Т. Малец Заказ 3378 Тираж Подписное ВНИИП^ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб,, 4/5 Производственно-издательский комбинат "Патент", г. Ужгород, ул.Гагарина, 101
ДивитисяДодаткова інформація
Назва патенту англійськоюLoad-gripping device
Автори англійськоюSopilniak Yurii Pavlovych, Bohomolnyi Leonid Mykhailovych
Назва патенту російськоюГрузозахватное устройство
Автори російськоюСопильняк Юрий Павлович, Богомольный Леонид Михайлович
МПК / Мітки
МПК: B66C 1/42
Мітки: вантажнозахватний, пристрій
Код посилання
<a href="https://ua.patents.su/6-2200-vantazhnozakhvatnijj-pristrijj.html" target="_blank" rel="follow" title="База патентів України">Вантажнозахватний пристрій</a>
Амортизуючий пристрій
Номер патенту: 2069
Опубліковано: 20.12.1994
Автор: Рахманов Микола Миколайович
МПК: F16F 1/02
Мітки: амортизуючий, пристрій
Формула / Реферат:
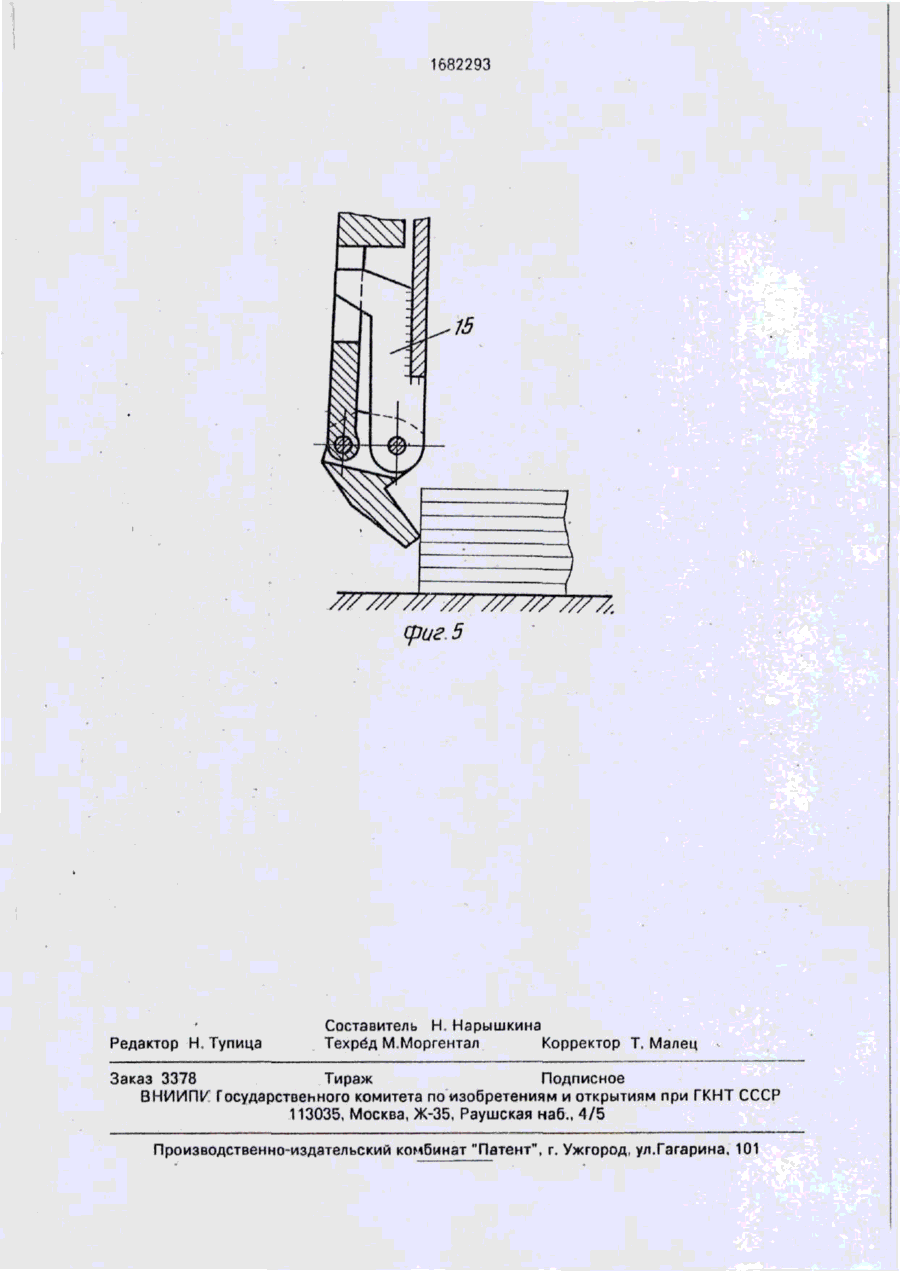
Амортизирующее устройство, содержащее корпус, подвижную часть и упругий элемент, установленный в корпусе с возможностью взаимодействия с его внутренней стенкой, отличающееся тем, что оно снабжено осями, одна из которых закреплена в корпусе по оси устройства, другие - в подвижной части, а упругий элемент выполнен в виде листовых рессор Л-образной формы, установленных на осях со встречно-направленными концами с возможностью их...
Пристрій для місцевої вулканізації конвейєрних стрічок

Номер патенту: 1747
Опубліковано: 25.10.1994
Автори: Петер Тіс, Гаральд Фудікар
МПК: B29C 35/02, B29L 29/00, B29C 73/00
Мітки: вулканізації, місцевої, конвейєрних, пристрій, стрічок
Формула / Реферат:
1. Устройство для местной вулканизации конвейерных лент по патенту № 1034600, отличающееся тем, что, с целью расширения технологических возможностей устройства при одновременном упрощении монтажа, обогреваемые плиты выполнены в виде набора полых брусков, равных по размерам поверхности нажимных пластин и смонтированных по одному на траверсе.2. Устройство по п.1, отличающееся тем, что на верхней траверсе бруски смонтированы под...
Спосіб монтажу каркасу будинків із збірних залізобетонних рам і пристрій для його здійснення
Номер патенту: 2024
Опубліковано: 20.12.1994
Автори: Тумаркін Лев Вульфович, Каганов Анатолій Ільіч, Бедім Василь Дмитрович, Шмуклер Валерій Семенович, Щербак Олексій Миколайович
МПК: E04G 21/24
Мітки: будинків, пристрій, здійснення, залізобетонних, каркасу, спосіб, збірних, рам, монтажу
Формула / Реферат:
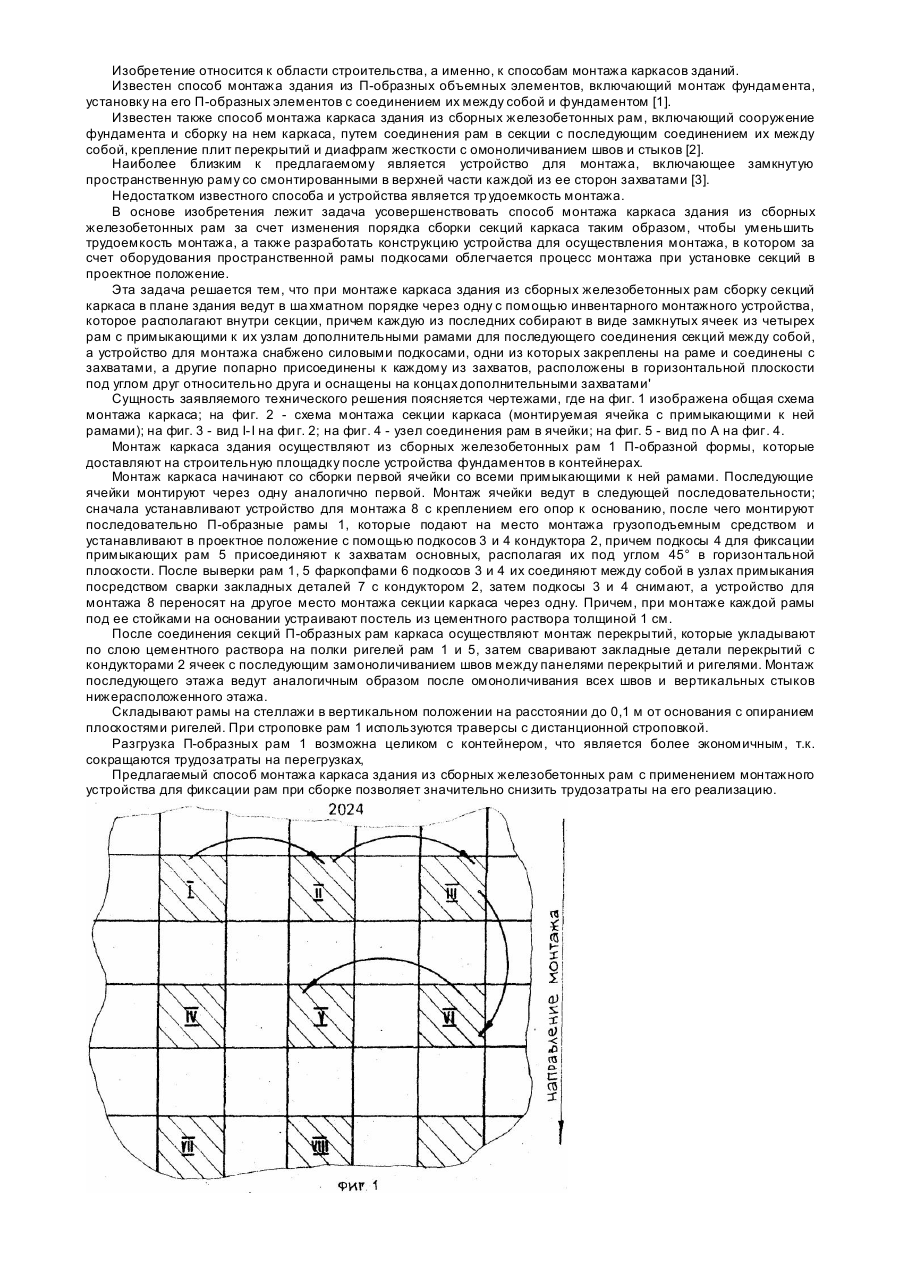
1. Способ монтажа каркаса здания из сборных железобетонных рам, включающий сооружение фундамента и сборку на нем каркаса путем соединения рам в секции с последующим соединением их между собой, крепление плит перекрытий и диафрагм жесткости с омоноличиванием швов и стыков, отличающийся тем, что сборку секций каркаса в плане здания ведут в шахматном порядке через одну с помощью инвентарного монтажного устройства, которое располагают внутри...
Пристрій для виготовлення ливарних покришок пневматичних шин
Номер патенту: 2394
Опубліковано: 26.12.1994
Автори: Науменко Олександр Петрович, Кушнір Олександр Володимирович, Василенко Віктор Іванович, Дзюра Євгеній Антонович
МПК: B29C 35/04, B29L 30/00, B29C 45/02
Мітки: ливарних, покришок, виготовлення, пристрій, пневматичних, шин
Формула / Реферат:
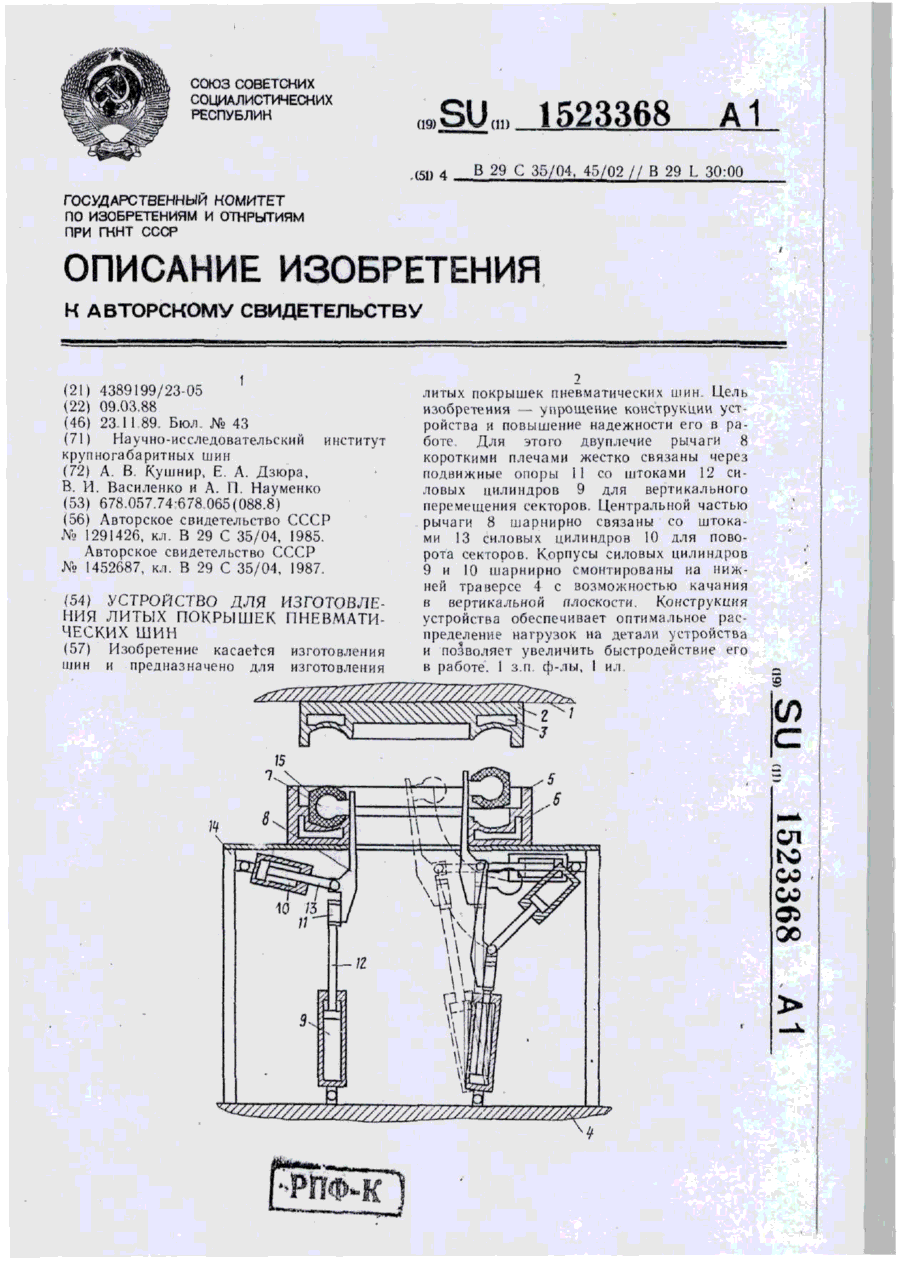
1. Устройство для изготовления литых покрышек пневматических шин, содержащее литьевой пресс, закрепленную на его подвижной траверсе верхнюю полуформу, связанную с его неподвижной траверсой нижнюю полуформу, тороидальный сердечник, образованный поворотными c вертикальной плоскости секторами, связанными посредством двуплечих рычагов и подвижной опоры с механизмом для извлечения секторов, имеющим силовые цилиндры для вертикального...
Пристрій для монтажу і перестановки секцій кріплення
Номер патенту: 375
Опубліковано: 30.04.1993
Автори: Сердюк Анатолій Дмитрович, Шабанов Микола Дмитрович, Пулеєв Сергій Федорович, Беляєв Михайло Георгієвич
МПК: E21D 11/40
Мітки: пристрій, секцій, перестановки, монтажу, кріплення
Формула / Реферат:
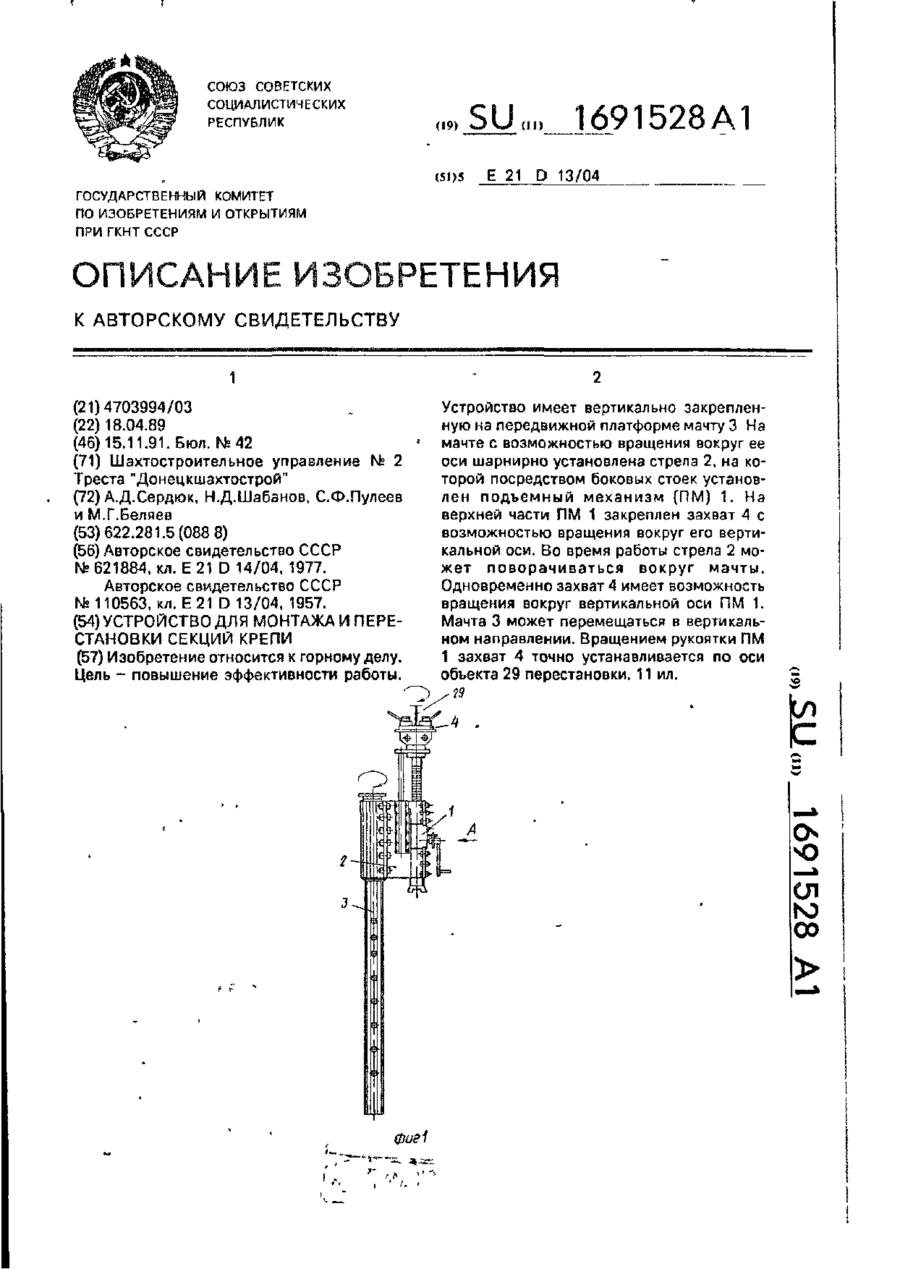
Формула изобретенияУстройство для монтажа и перестановки секций крепи, включающее вертикально закрепленную на передвижной платформе мачту со стрелой, установленной на мачте с возможностью вращения вокруг ее оси, подъемный механизм и захват, отличающееся тем, что, с целью повышения эффективности работы, подъемный механизм установлен на стреле и связан с ней посредством боковых стоек, при этом захват закреплен на верхней части подъемного...
Попередній патент: Спосіб визначення стійкості озимої пшениці до церкоспорельозної гнилі
Наступний патент: Пристрій для мікрорентгенографії
Випадковий патент: Водна вогнегасна речовина k2[cucl4]