Пристрій автоматичного виявлення
Номер патенту: 26012
Опубліковано: 27.08.2007
Автори: КОНОНОВИЧ ВІКТОР ЯКОВИЧ, Каспирович Олександр Геннадійович, Лаврентьєв Володимир Миколайович
Формула / Реферат
Пристрій автоматичного виявлення, який містить q доплерівських фільтрів, q порогових схем і схему АБО, q ліній затримки, q схем І і бінарний нагромаджувач, при цьому виходи доплерівських фільтрів з'єднані з входами відповідних ліній затримки, відводи 1, 2...λ-1, λ+1...m ліній затримки з'єднані з входами відповідних пристроїв усереднення, а λ-ий відвід ліній затримки з'єднаний із входами відповідних схем порівняння і з входами відповідних порогових схем, виходи пристроїв усереднення з'єднані з другими входами відповідних схем порівняння, виходи яких з'єднані з входами відповідних регістрів затримки, виходи регістрів затримки з'єднані з першими входами відповідних схем І, а виходи порогових схем з'єднані з другими входами відповідних схем І, виходи яких з'єднані з входами схеми АБО, вихід схеми АБО з'єднаний із входом бінарного нагромаджувача, який відрізняється тим, що в нього додатково введені N допоміжних порогових схем, схема збігів і додатковий регістр затримки, при цьому входи допоміжних порогових схем з'єднані з відводами λ відповідних ліній затримки, виходи допоміжних порогових схем з'єднані з входами схеми збігів, вихід схеми збігів з'єднаний із входом додаткового регістра затримки, а вихід додаткового регістра затримки з'єднаний із входом АБО схеми.
Текст
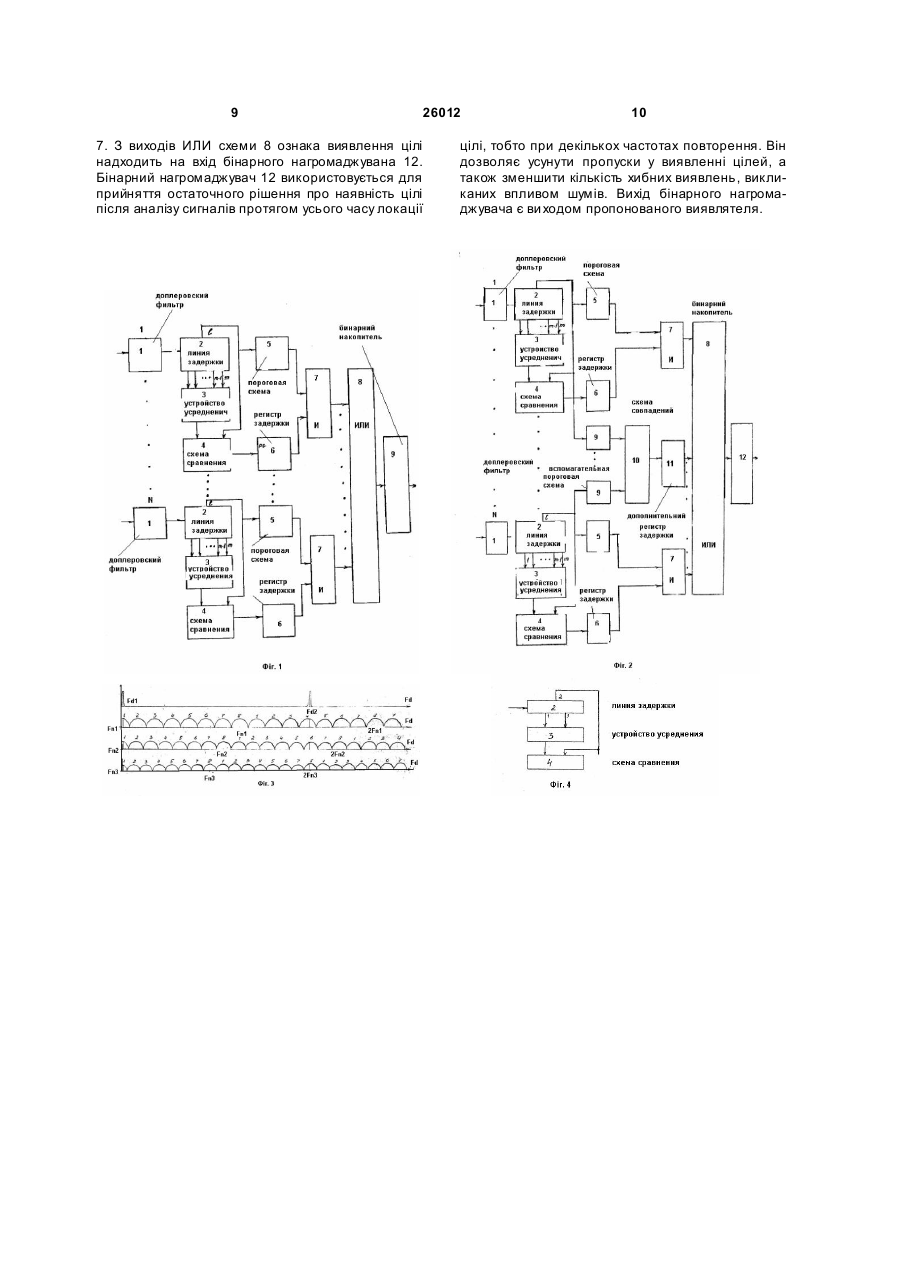
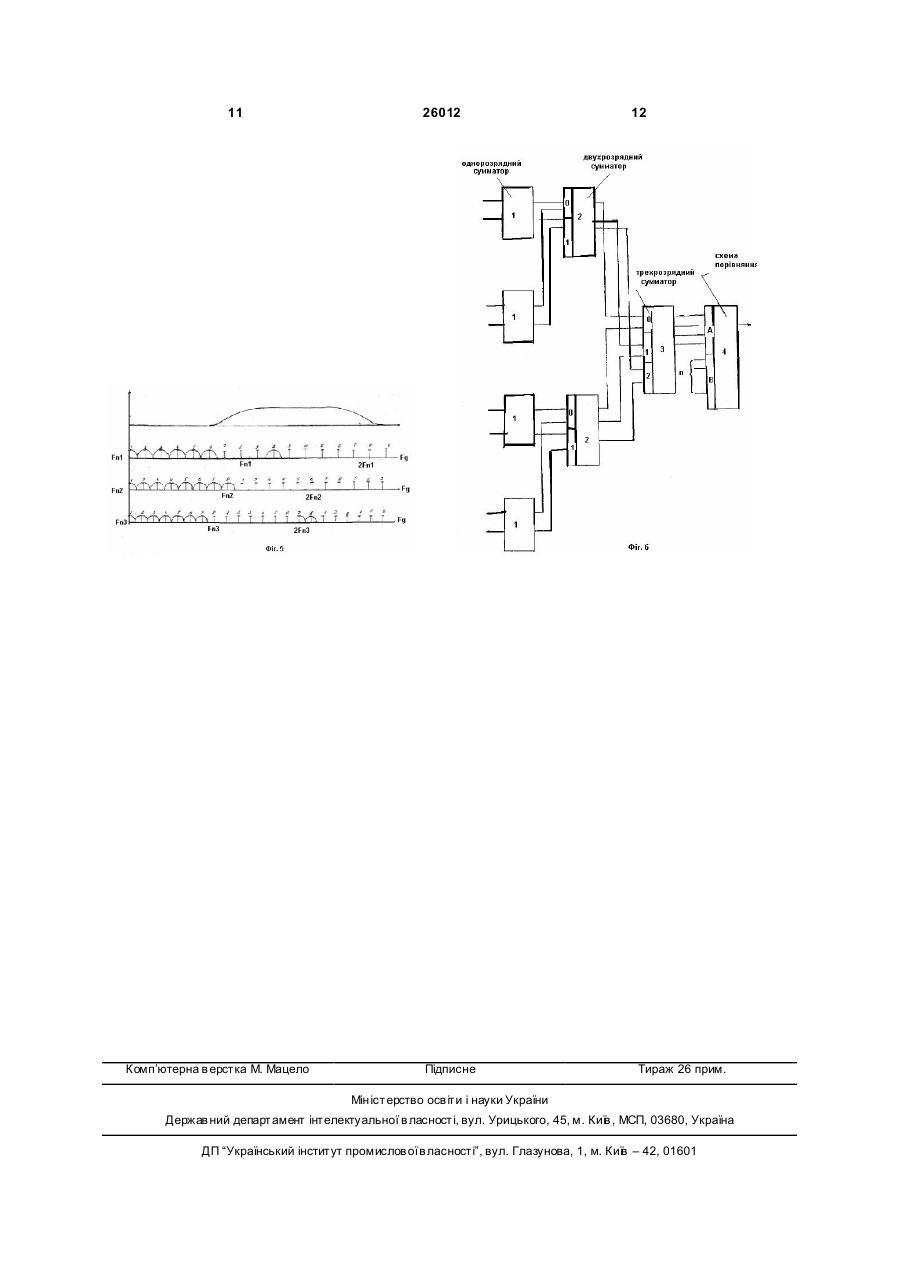
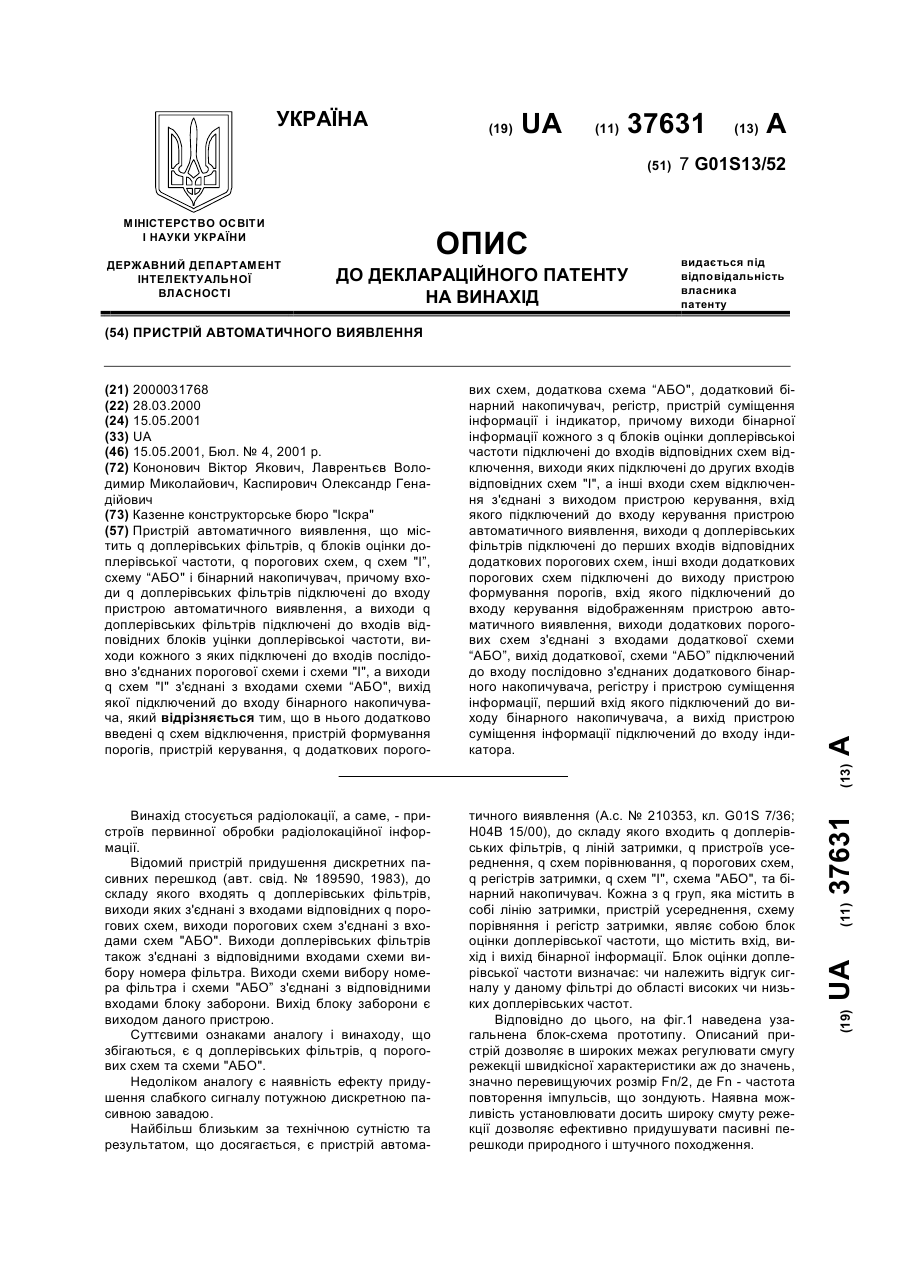
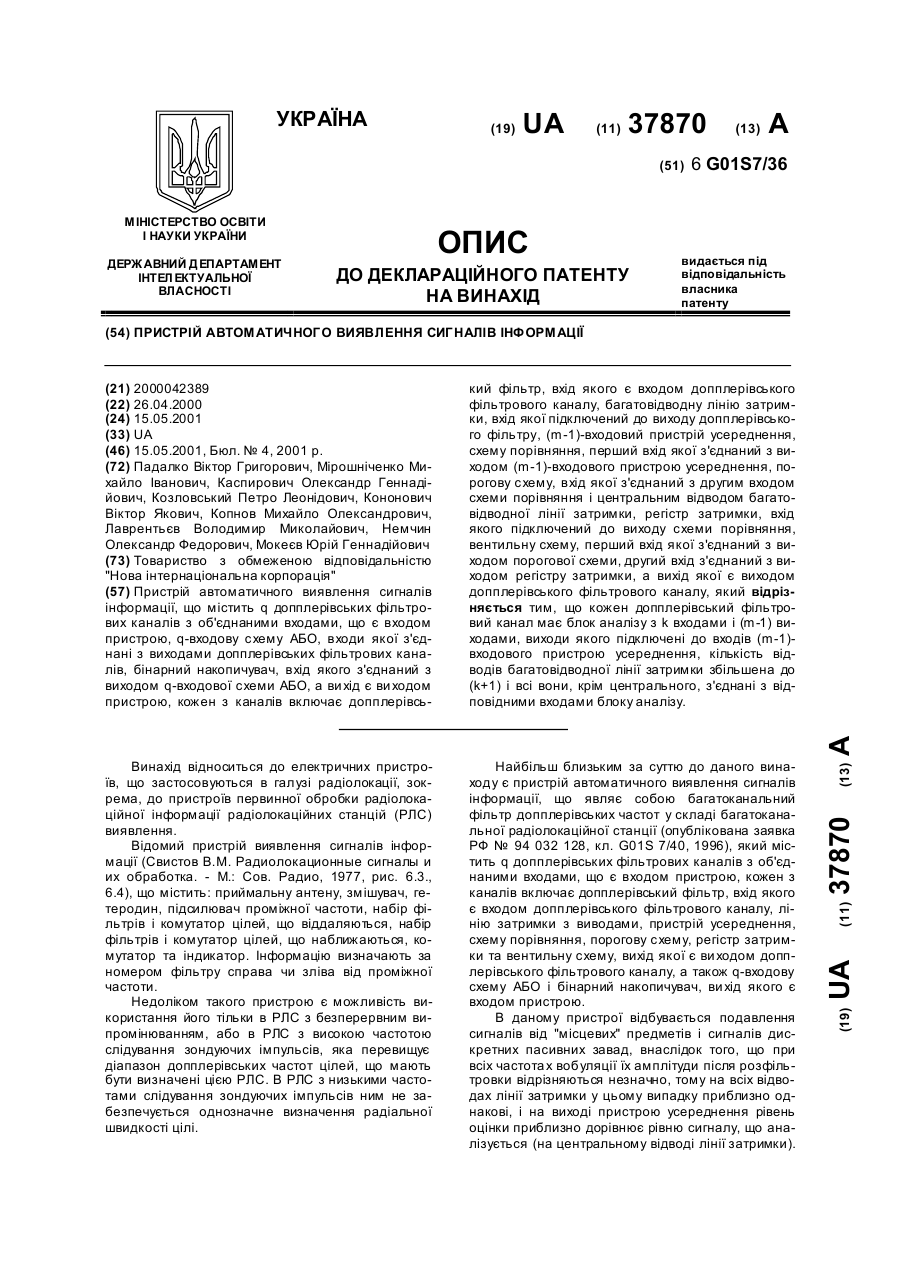
Пристрій автоматичного виявлення, який містить q доплерівських фільтрів, q порогових схем і схему АБО, q ліній затримки, q схем І і бінарний нагромаджувач, при цьому виходи доплерівських фільтрів з'єднані з входами відповідних ліній затримки, відводи 1, 2...λ-1, λ+1...m ліній затримки з'єднані з входами відповідних пристроїв усереднення, а λ-ий відвід ліній затримки з'єднаний із входами відповідних схем порівняння і з входами 3 26012 з частот повторення. При інших часто тах повторення відгук сигналу від цілі, як правило, не попадає в той же фільтр, а виділяється в інших доплерівських фільтрах. Однак, при виявленні цілей із широким доплерівським спектром, коли ширина спектра сигналу, відбитого від цілі, стає порівнянною з частотою повторення зондувальних імпульсів, відбувається погіршення виявлення. Погіршення виявлення викликане тим, що сигнал від цілі із широким доплерівським спектром буде присутній на виходах усі х доплерівських фільтрів при всіх частота х повторення. При цьому, відношення сигналу у фільтрі при даній частоті повторення (на відводі l лінії затримки 2) до усередненого по частотах повторення сигналу в цьому ж фільтрі (з виходу пристрою усереднення 3) виявляється близьким до одиниці. Це відношення не перевищить порогового значення в схемі порівняння 4, і виявлення цілі із широким доплерівським спектром не відбудеться. В основу корисної моделі поставлена задача підвищення імовірності виявлення цілей із широким доплерівським спектром і забезпечення можливості виявлення вертольотів, що зависають, в умовах впливу відбиття від місцевих предметів і пасивних завад. Поставлена задача досягається тим, що в пристрій автоматичного виявлення, який містить q ліній затримки, q схем "И" і бінарний нагромаджувач, при цьому виходи доплерівських фільтрів з'єднані з входами відповідних ліній затримки, відводи 1,2... l - 1 l + 1 ...m ліній затримки з'єднані з , входами відповідних пристроїв усереднення, а l ий відвід ліній затримки з'єднаний із входами відповідних схем порівняння і з входами відповідних порогових схем, виходи пристроїв усереднення з'єднані з другими входами відповідних схем порівняння, виходи яких з'єднані з входами відповідних регістрів затримки, виходи регістрів затримки з'єднані з першими входами відповідних схем «И», а виходи порогових схем з'єднані з другими входами відповідних схем «И», виходи яких з'єднані з входами схеми «ИЛИ», вихід схеми «ИЛИ» з'єднаний із входом бінарного нагромаджувана, додатково введені N допоміжних порогових схем, схема збігів і додатковий регістр затримки, при цьому входи допоміжних порогових схем з'єднані з відводами l відповідних ліній затримки, виходи допоміжних порогових схем з'єднані з входами схеми збігів, вихід схеми збігів з'єднаний із входом додаткового регістра затримки, а вихід додаткового регістра затримки з'єднаний із входом ИЛИ схеми. Причинно-наслідковий зв'язок між сукупністю ознак корисної моделі і технічним результатом полягає в такому. Завдяки тому, що в пристрій автоматичного виявлення додатково введені N допоміжних порогових схем, схема збігів і додатковий регістр затримки, при цьому входи допоміжних порогових схем з'єднані з відводами l відповідних ліній затримки, виходи допоміжних порогових схем з'єднані з входами схеми збігів, вихід схеми збігів з'єднаний із входом додаткового регістра затримки, а вихід додаткового регістра затримки з'єднаний із 4 входом ИЛИ схеми, підвищена імовірність виявлення цілей із широким доплерівським спектром, і забезпечена можливість виявлення вертольотів, що зависають, в умовах впливу відбиття від місцевих предметів і пасивних завад. Сутність корисної моделі пояснюється кресленнями, де на Фіг.2 приведена структурна схема пропонованого пристрою, на Фіг.3, Фіг.4 і Фіг.5 приведені рисунки, що пояснюють принцип роботи пристрою автоматичного виявлення. На Фіг.6 приведений приклад виконання схеми збігів. Пропонований пристрій автоматичного виявлення (див. Фіг.2) містить N доплерівських фільтрів 1, виходи яких з'єднані з входами відповідних ліній затримки 2. Відводи 1,2... l - 1 l + 1 ...m ліній , затримки 2 з'єднані з входами відповідних пристроїв усереднення 3, а l -тий відвід ліній затримки 2 з'єднаний із входами відповідних схем порівняння 4 і з входами відповідних порогових схем 5. Виходи пристроїв усереднення 3 з'єднані з другими входами відповідних схем порівняння 4, виходи яких з'єднані з входами відповідних регістрів затримки 6. Виходи регістрів затримки 6 з'єднані з першими входами відповідних схем И 7. Виходи порогових схем 5 з'єднані з другими входами відповідних схем И 7, виходи яких з'єднані з входами ИЛИ схеми 8. Крім того, відводи l ліній затримки 2 з'єднані з входами відповідних допоміжних порогових схем 9. Виходи допоміжних порогових схем 9 з'єднані з входами схеми збігу 10, вихід якої з'єднаний із входом додаткового регістра затримки 11. Вихід додаткового регістра затримки 11 з'єднаний із входом ИЛИ схеми 8. Вихід схеми 8 з'єднаний із входом бінарного нагромаджувана 12, вихід якого є ви ходом пристрою автоматичного виявлення. Виявлення цілей з вузьким доплерівським спектром здійснюється за допомогою N каналів виявлення доплерівських фільтрів, кожний з яких містить лінію затримки 2, пристрій усереднення 3, схему порівняння 4, порогову схему 5, регістр затримки 6, схему И 7. Цілі з широким доплерівським спектром виявляються за допомогою каналу виявлення, що складається з N допоміжних порогових схем 9, схеми збігів 10 і додаткового регістра затримки 11. Працює пропонований пристрій автоматичного виявлення в такий спосіб. На входи доплерівських фільтрів 1 (див. Фіг.2) надходить сигнал з виходу фазового детектора імпульсної РЛС з вобульованою частотою повторення зондувальних імпульсів. Припустимо, що РЛС має m частот повторення, зміна яких відбувається через кожні N періодів повторення зондувальних імпульсів, тобто в РЛС використовується «пачкова» вобуляція частоти повторення. У доплерівських фільтрах 1 протягом кожної "пачки", що складається з N імпульсів запуску, здійснюється розфільтровка вхідного сигналу. Отже на виходах доплерівських фільтрів 1 буде отриманий фазовий спектр вхідного сигналу для кожної з m частот повторення окремо. З ви ходу доплерівських фільтрів 1 відфільтрований сигнал надходить на входи відповідних ліній затримки з m відводами 2. Час затримки сигналу між сусідніми відводами обрано таким, що дорівнює тривалості «пачки» зондувальних імпульсів. Завдяки цьому 5 26012 сигнал на сусідніх відводах лінії затримки 2 відповідає різним частотам повторення. У пристрої аналізується сигнал, що надходить з відводу l ліній затримки 2. З відводів 1,2... l - 1 l + 1 ...m ліній затримки 2 інформація , надходить на входи пристрою усереднення 3. У пристрої усереднення 3 визначається середнє значення сигналу по всіх частотах повторення крім частоти, при якій отриманий аналізований сигнал. З ви ходу пристрою усереднення 3 обчислене середнє значення надходить на вхід схеми порівняння 4. На другий вхід цієї схеми приходить аналізований сигнал з відводу l лінії затримки 2. У схемі порівняння 4 аналізований сигнал з l -го відводу лінії затримки 2 порівнюється з усередненим по частотах повторення значенням сигналу, що надходить з виходу пристрою усереднення 3. У випадку перевищення сигналу, що знімається з відводу l лінії затримки 2, над середнім значенням у визначене число раз, на виході схеми порівняння 4 формується сигнал логічної одиниці. Робота даної частини схеми пояснюється Фіг.3, де зображені АЧХ доплерівських фільтрів для випадку: - кількість доплерівських фільтрів - N=8; - кількість частот повторення - m=3. На осі доплерівських частот АЧХ доплерівських фільтрів повторюються через інтервали, що дорівнюють частоті повторення зондувальних імпульсів РЛС. Оскільки в даному випадку використовується три частоти повторення зондувальних імпульсів, на осі доплерівських частот АЧХ восьми доплерівських фільтрів перекривають три різні по величині частотні області, ширина яких дорівнює Fnl, Fn2 і F n3 відповідно для першої, другої і третьої частоти повторення. Як видно з рисунків, приведених на Фіг.3, при малих доплерівських частотах АЧХ однойменних доплерівських фільтрів (наприклад, 1-го чи 2-го) перекривають приблизно ту ж саму частотну область при різних частотах повторення. Зі збільшенням доплерівської частоти АЧХ однойменних фільтрів починають усе більше зміщатися один відносно одного при зміні частоти повторення. При досить великій доплерівській частоті АЧХ однойменних фільтрів перекривають різні області доплерівських частот при різних частотах повторення. На верхньому рисунку Фіг.3 зображені доплерівські спектри пасивної завади і цілі, а на рисунках, що зображують АЧХ доплерівських фільтрів, знаком "Т" умовно показані амплітуди сигналів від завади і цілі на виходах відповідних фільтрів. Спектр пасивної завади лежить в області малих доплерівських частот і, як видно з рисунків на Фіг.3, сигнал з частотою Fd1, відбитий від пасивної завади, виділяється в першому доплерівському фільтрі при всіх частота х повторення. Для випадку, показаного на Фіг.3, лінія затримки 2 має три відводи, а пристрій усереднення 4 містить два входи (див.Фіг.4). Припустимо, що на першому відводі лінії затримки 2 першого доплерівського фільтра присутній сигнал, отриманий при частоті повторення Fn1. З відводу 2 лінії затримки 2 знімається аналізований сигнал, отриманий при частоті 6 повторення Fn2, a на відводі 3 присутній сигнал, отриманий при частоті повторення Fn3. Сигнал, відбитий від пасивної завади, має приблизно рівний рівень на виході першого доплерівського фільтра при всіх частотах повторення (див. Фіг.3). Отже, відношення аналізованого сигналу, отриманого при частоті повторення Fn2, до усередненого по частотах повторення Fn1 і Fn3 сигналу з виходу пристрою усереднення 3 буде близьким до одиниці. Отримане відношення не перевищить поріг у схемі порівняння 4 і, отже, сигнал від пасивної завади в каналі першого доплерівського фільтра виявлений не буде. Аналогічно не відбудеться виявлення сигналу від пасивної завади в каналі першого доплерівського фільтра й у випадку аналізу сигналу, отриманого при частоті повторення Fn1 чи Fn3, оскільки й у цьому випадку відношення аналізованого сигналу, отриманого при одній з даних частот повторення, до сигналу, усередненому по інших частотах повторення, також близько до одиниці. Виявлення сигналу, відбитого від пасивної завади, в каналах інших доплерівських фільтрів неможливо, тому що їх АЧХ (див. Фіг.3) не перекривають обдасть доплерівських частот, займану спектром пасивної завади. Розглянемо тепер роботу цієї ж частини схеми пропонованого пристрою автоматичного виявлення при обробці сигналу від цілі з вузьким доплерівським спектром. Як видно з рисунка на Фіг.3, сигнал, відбитий від рухомої цілі, має високу доплерівську частоту F d2. При такий доплерівській частоті сигнал від цілі виділяється в четвертому доплерівському фільтрі на частоті повторення Fn1, у шостому фільтрі на частоті повторення Fn2 і у восьмому фільтрі на частоті повторення Fn3. У визначений момент часу на відводі 2 лінії затримки 2 (див. Фіг.4) у каналі четвертого доплерівського фільтра буде присутній сигнал, виділений четвертим доплерівським фільтром при частоті повторення Fn1. На відводах 1 і 3 лінії затримки 2 у цей момент будуть присутні сигнали, виділені четвертим доплерівським фільтром при частотах повторення Fn3 і Fn2 відповідно. Як видно з рисунків на Фіг.3, відгук сигналу від цілі в четвертому доплерівському фільтрі при частотах повторення Fn2 і Fn3 практично дорівнює нулю, оскільки АЧХ четвертого фільтра при даних частотах повторення не перекривають область доплерівських частот, займану спектром сигналу, відбитого від цілі. Отже, відношення аналізованого сигналу, отриманого при частоті повторення Fn1 до усередненого по частотах повторення Fn2 і Fn3 сигналу в каналі 4-го доплерівського фільтра буде дуже великим, і на виході схеми порівняння 4 з'явиться сигнал логічної одиниці. Аналогічно відбувається виділення сигналу від цілі в каналі шостого доплерівського фільтра при аналізі сигналу, отриманого при частоті повторення Fn2, і в каналі восьмого доплерівського фільтра при аналізі сигналу, отриманого при частоті повторення Fn3. У каналі кожного доплерівського фільтра результат порівняння з виходу схеми порівняння 4 надходить на вхід регістра затримки 6 (див. Фіг.2). 7 26012 Регістр затримки 6 здійснює затримку результату порівняння на час обробки аналізованого сигналу в пороговій схемі 5. На вхід порогової схеми 5 надходить аналізований сигнал з відводу l лінії затримки 2. У пороговій схемі 5 приймається рішення про перевищення аналізованого сигналу над енергетичним порогом, значення якого визначається заданим рівнем хибних тривог по шумах. Сигнали з виходів порогової схеми 5 і регістра затримки 6 надходять на входи схеми И 7. Якщо в каналі якого-небудь фільтра аналізований сигнал з відводу l лінії затримки 2 перевищує значення порога в пороговій схемі 5 і перевершує усереднений по частотах повторення сигнал у задане число раз ( у схемі порівняння 4), то на виході схеми И 7 з'являється сигнал логічної одиниці. Цей сигнал і є ознакою наявності цілі. Розглянемо далі роботу пропонованого пристрою автоматичного виявлення при впливі на його вхід сигналу, відбитого від цілі із широким доплерівським спектром. На Фіг.5 зображені АЧХ доплерівських фільтрів N=8; кількість частот повторення m=3. На верхньому малюнку Фіг.5 тепер приведений спектр сигналу, відбитого від гвинтомоторної цілі. Як показує аналіз записів реальних сигналів, відбитих від гвинтомоторних цілей, ширина їхніх спектрів досягає і навіть перевищує величину Fn max (Fn max - максимальна частота повторення зондувальних імпульсів РЛС). Отже, відгук сигналу, відбитого від цілі, що має широкий доплерівський спектр, незалежно від її радіальної швидкості, буде присутній на виході всі х доплерівських фільтрів при всіх частота х повторення. На Фіг.5 цей відгук показаний знаком «Т». При цьому, відгук сигналу на виході будь-якого доплерівського фільтра порівняємо за величиною з відгуком сигналу на виходах всіх інши х доплерівських фільтрів. Таким чином, аналізований сигнал на відводі 2 лінії затримки 2 (див. Фіг.4) у каналі кожного доплерівського фільтра виявляється таким, що приблизно дорівнює усередненому по частота х повторення сигналу з ви ходу пристрою усереднення 3, і, отже, їхнє відношення не перевищить поріг, встановлений у схемі порівняння 4. Ціль у жодному з каналів доплерівських фільтрів виявлена не буде. Виявлення цілі в даному випадку відбувається в такий спосіб. Аналізований сигнал (див. Фіг.2) з виходів l усіх ліній затримки 2 надходить на входи допоміжних порогових схем 9. Тобто сигнал з виходу кожного доплерівського фільтра порівнюється з заданим порогом у відповідній допоміжній пороговій схемі 9. Результат порівняння з виходів допоміжної порогової схеми 9 надходить на входи схеми збігів 10. У схемі збігів 10 використовується критерій "k з n" (величина к вибирається відповідно до реального спектра цілі). У випадку, якщо сигнал з виходів k чи більше доплерівських фільтрів перевищує поріг, установлений у допоміжних порогових схемах 9, тобто ціль має широкий доплерівський спектр, на входи схеми збігів 10 надходить k чи більше логічних одиниць. Критерій "k з n" виконається, і на виході схеми збігів 10 з'явиться сигнал логічної одиниці, що відповідає ознаці виявлення цілі. Даний сигнал надходить на вхід додаткового регістра затримки 11. Додатковий 8 регістр затримки 11 служить для вирівнювання в часі обробки інформації в каналах доплерівських фільтрів і в каналі виявлення цілей із широким доплерівським спектром. Допоміжні порогові схеми 9 служать для забезпечення заданого рівня хибних тривог. В якості схеми збігів 10 може використовуватися пристрій, що містить N/2 однорозрядних суматорів, N/4 дворозрядних суматорів, N/8 трирозрядних суматорів, два суматора, розрядність яких дорівнює ( l og2N )-1, суматор з розрядністю l og2N і схему порівняння (де N - кількість доплерівських фільтрів), при цьому, перші виходи однорозрядних суматорів з'єднані з входами першого розряду дворозрядних суматорів. Другі виходи однорозрядних суматорів з'єднані з входами другого розряду дворозрядних суматорів. Перші виходи дворозрядних суматорів з'єднані з входами першого розряду трирозрядних суматорів. Другі виходи дворозрядних суматорів з'єднані з входами другого розряду трирозрядних суматорів. Треті виходи дворозрядних суматорів з'єднані з входами третього розряду трирозрядних суматорів і т.д. Виходи суматора з розрядністю, що дорівнює l og2N , з'єднані з відповідними входами схеми порівняння. На інші входи схеми порівняння подається двійковий код числа к, обраного відповідно до критерію "k з n". Приклад реалізації схеми збігів для випадку, коли кількість доплерівських фільтрів N=8, приведений на Фіг.6. Працює схема збігів у такий спосіб. На входи однорозрядних суматорів 1 надходять сигнали перевищення порога з виходів додаткових порогових схем. На виходах однорозрядних суматорів 1 виробляється дворозрядний двійковий код кількості перевищень на їхніх входах. Дворозрядний код кількості перевищень з виходів кожної пари однорозрядних суматорів 1 підсумовується за допомогою дворозрядних суматорів 2. На виходах дворозрядних суматорів 2 формується трирозрядний двійковий код кількості перевищень на входах кожної пари однорозрядних суматорів 1. Трирозрядний код кількості перевищень з виходів дворозрядних суматорів 2 підсумовується за допомогою трирозрядного суматора 3, на виходах якого при цьому формується чотирирозрядний двійковий код кількості перевищень на усі х входа х однорозрядних суматорів 1. З ви ходу трирозрядного суматора 3 код кількості перевищень надходить на перші входи схеми порівняння 4. Другі входи схеми порівняння 4 розпаюються на корпус чи на ви хід формувача логічної одиниці таким чином, щоб одержуваний у результаті двійковий код відповідав числу к, обраному відповідно до критерію "k з n". Двійковий код кількості перевищень з виходів трирозрядного суматора 3 порівнюється в схемі порівняння 4 із заданим числом к, і, якщо число перевищень, що надходять на входи схеми збігів, більше чи дорівнює к, на виході схеми порівняння 4 формується сигнал логічної одиниці. З виходу додаткового регістра затримки 11 ознака виявлення цілі у вигляді логічної одиниці надходить на вхід ИЛИ схеми 8. На інші входи ИЛИ схеми 8 надходять ознаки виявлення цілей з вузьким доплерівським спектром з виходів схем И 9 26012 7. З виходів ИЛИ схеми 8 ознака виявлення цілі надходить на вхід бінарного нагромаджувана 12. Бінарний нагромаджувач 12 використовується для прийняття остаточного рішення про наявність цілі після аналізу сигналів протягом усього часу локації 10 цілі, тобто при декількох частотах повторення. Він дозволяє усунути пропуски у виявленні цілей, а також зменшити кількість хибних виявлень, викликаних впливом шумів. Вихід бінарного нагромаджувача є ви ходом пропонованого виявлятеля. 11 Комп’ютерна в ерстка М. Мацело 26012 Підписне 12 Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for automatically detecting targets
Автори англійськоюKononovych Viktor Yakovych, Kaspyrovych Oleksandr Hennadiiovych, Lavrentiev Volodymyr Mykolaiovych
Назва патенту російськоюУстройство для автоматического обнаружения целей
Автори російськоюКононович Виктор Яковлевич, Каспирович Александр Геннадиевич, Лаврентьев Владимир Николаевич
МПК / Мітки
МПК: G01S 7/36
Мітки: пристрій, виявлення, автоматичного
Код посилання
<a href="https://ua.patents.su/6-26012-pristrijj-avtomatichnogo-viyavlennya.html" target="_blank" rel="follow" title="База патентів України">Пристрій автоматичного виявлення</a>
Пристрій автоматичного виявлення
Номер патенту: 37631
Опубліковано: 15.06.2004
Автори: КОНОНОВИЧ ВІКТОР ЯКОВИЧ, Каспирович Олександр Генадійович, Лаврентьєв Володимир Миколайович
МПК: G01S 13/52, G01S 13/00
Мітки: автоматичного, виявлення, пристрій
Формула / Реферат:
Пристрій для автоматичного виявлення, що містить q доплерівських фільтрів, q блоків оцінки доплерівської частоти, q порогових схем, q схем "І", схему "АБО" і бінарний накопичувач, причому входи q доплерівських фільтрів підключені до входу пристрою автоматичного виявлення, а виходи q доплерівських фільтрів підключені до входів відповідних блоків оцінки доплерівської частоти, виходи кожного з яких підключені до входів...
Пристрій автоматичного виявлення сигналів
Номер патенту: 37870
Опубліковано: 15.05.2003
Автори: КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ, Каспирович Олександр Геннадійович, Мокеєв Юрій Геннадійович, Козловський Петро Леонідович, Мирошниченко Михайло Іванович, Лаврентьєв Володимир Миколайович, Падалко Віктор Григорович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ, Немчин Олександр Федорович
МПК: G01S 7/36
Мітки: автоматичного, сигналів, пристрій, виявлення
Формула / Реферат:
Пристрій автоматичного виявлення сигналів, що містить q доплерівських фільтруючих каналів з об'єднаними входами, що є входом пристрою, q-входову схему АБО, входи якої з'єднані з виходами доплерівських фільтруючих каналів, бінарний накопичувач, вхід якого з'єднаний з виходом q-входової схеми АБО, а вихід є виходом пристрою, кожен з каналів включає доплерівський фільтр, вхід якого є входом доплерівського фільтруючого каналу, багатовідвідну...
Пристрій автоматичного виявлення сигналів інформації
Номер патенту: 37870
Опубліковано: 15.05.2001
Автори: Мирошниченко Михайло Іванович, Лаврентьєв Володимир Миколайович, Немчин Олександр Федорович, Падалко Віктор Григорович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ, Каспирович Олександр Геннадійович, Мокеєв Юрій Геннадійович, КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ, Козловський Петро Леонідович
МПК: G01S 7/36
Мітки: автоматичного, сигналів, пристрій, виявлення, інформації
Формула / Реферат:
Пристрій автоматичного виявлення сигналів, що містить q доплерівських фільтруючих каналів з об'єднаними входами, що є входом пристрою, q-входову схему АБО, входи якої з'єднані з виходами доплерівських фільтруючих каналів, бінарний накопичувач, вхід якого з'єднаний з виходом q-входової схеми АБО, а вихід є виходом пристрою, кожен з каналів включає доплерівський фільтр, вхід якого є входом доплерівського фільтруючого каналу, багатовідвідну...
Пристрій виявлення
Номер патенту: 24230
Опубліковано: 25.06.2007
Автори: Лаврентьєв Володимир Миколайович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ, Денека Анатолій Анатолійович, Каспирович Олександр Генадійович
МПК: G01S 7/36
Формула / Реферат:
Пристрій виявлення, що містить блок оцінки рівня шуму, вихід якого з'єднаний з входом додаткового блока затримки і з першим входом компаратора, і подільник, який відрізняється тим, що в пристрій уведені К-2 додаткових блоків затримки (де К - кількість вибірок шуму), К-1 компараторів, допоміжний блок затримки і розв'язувальний блок, при цьому, вхід блока оцінки рівня шуму з'єднаний з входом допоміжного блока затримки, вихід якого з'єднаний з...
Пристрій обробки радіолокаційної інформації
Номер патенту: 39461
Опубліковано: 15.06.2001
Автори: Мокеєв Юрій Геннадійович, Немчин Олександр Федорович
МПК: G01S 13/56, G01S 13/00
Мітки: обробки, радіолокаційної, інформації, пристрій
Формула / Реферат:
Пристрій обробки радіолокаційної інформації, який містить гребінку з q доплеровських фільтрових каналів з об'єднаними входами, кожен з каналів містить доплеровський фільтр, вхід якого є входом доплерівського фільтрового каналу, q-входову схему АБО та бінарний накопичувач, вхід якого з'єднаний з виходом q-входової схеми АБО, який ваідрізняється тим, що кожний доплеровський канал містить блок визначення рівня шуму та лінію затримки, об'єднані...
Попередній патент: Спосіб будівництва “народний дім”
Наступний патент: Спосіб визначення рівня опору тріщиноутворенню штабового металу
Випадковий патент: Електродно-вихровий індукційний котел