Пристрій для обробки зображень та спосіб визначення лінійного зсуву зразка відносно номінального положення
Номер патенту: 27331
Опубліковано: 15.09.2000
Автори: Панофські Едвард, Ейзенбарт Крістоф, Макчі Денніс, Фінкельштейн Іра
Текст
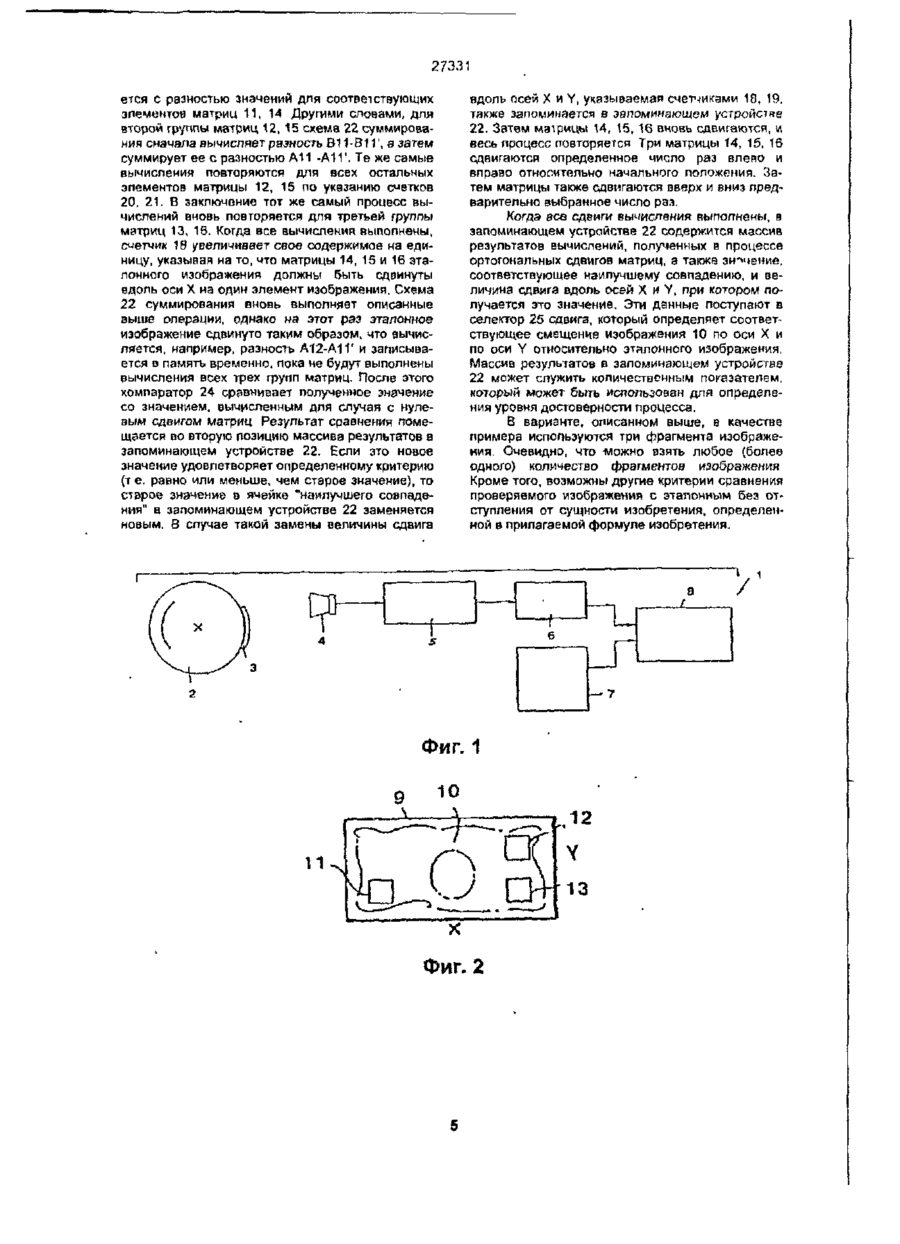
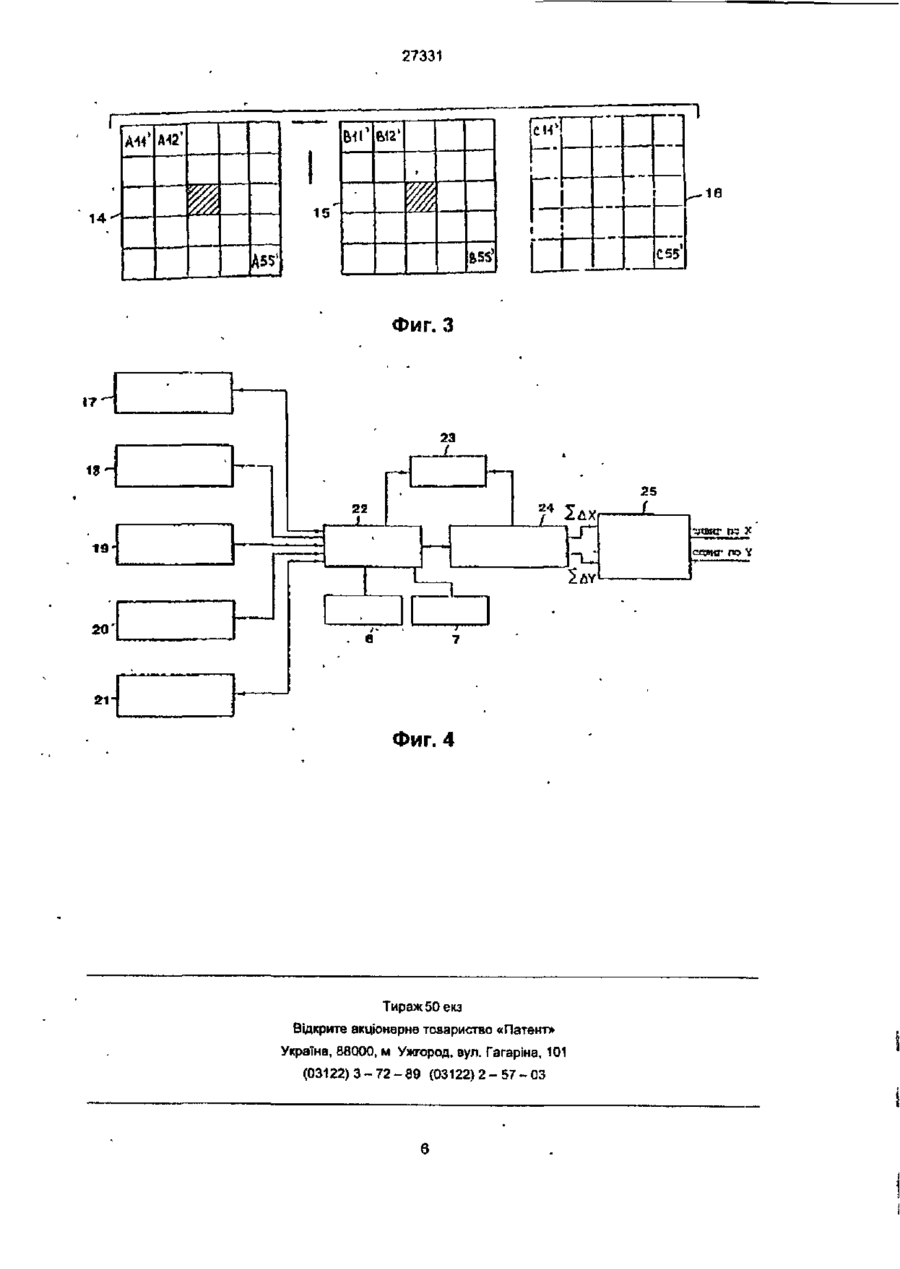
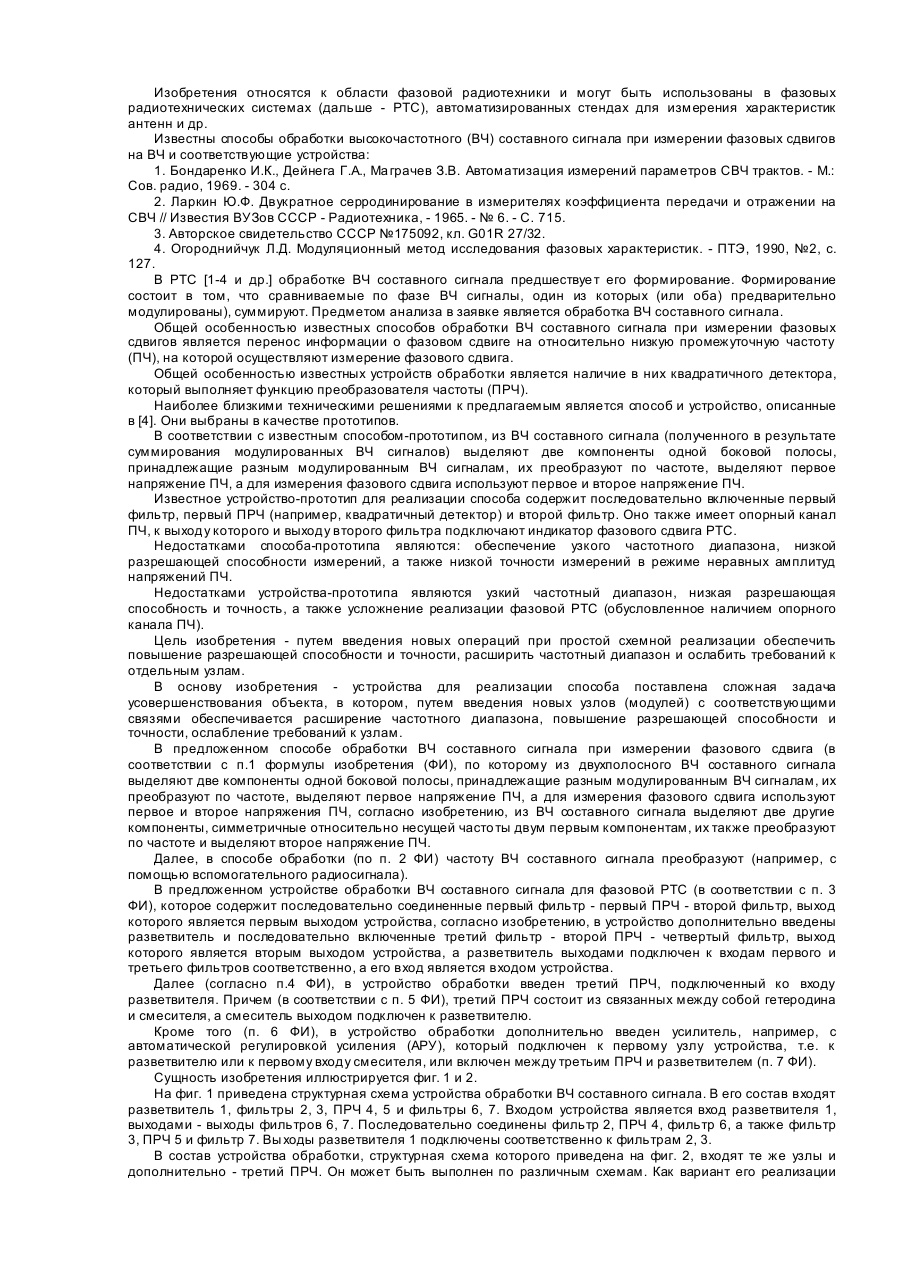
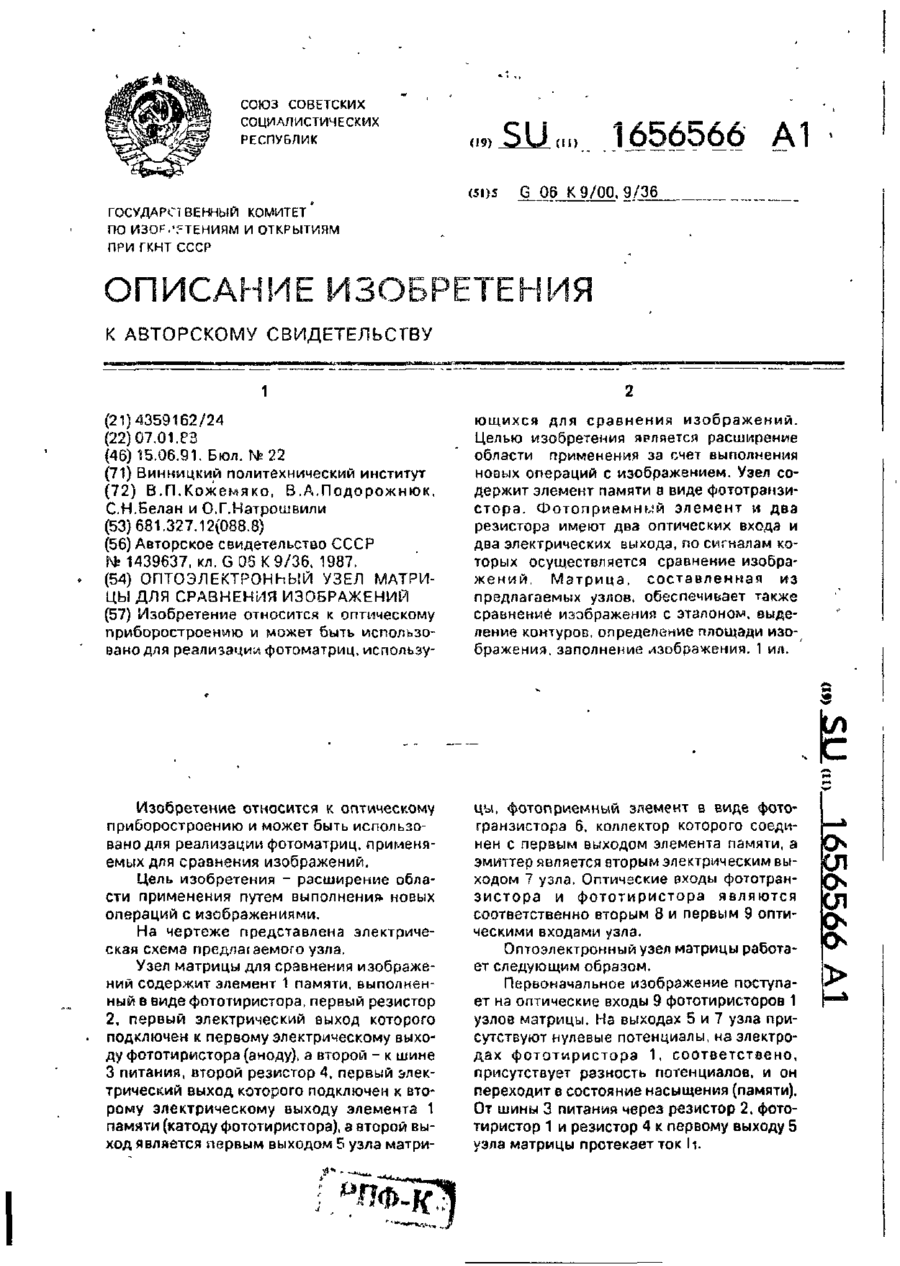
1. Устройство для обработки изображений, содержащее средства сбора данных об изображении, соответствующих, по меньшей мере, двум фрагментам изображения, средства запоминания, по меньшей мере, двух эталонных фрагментов' эталонного изображения, соответствующих указанным фрагментам изображения, и средства компиляции информации от указанных фрагментов и эталонных фрагментов, отличающееся тем, что указанные фрагменты представлены в виде двухмерных матриц элементов изображения, средства компиляции содержат суммирующие средства для вычисления абсолютных значений разностей между каждым из указанных, по меньшей мере, двух фрагментов и соответствующим ему эталонным фрагментом на поэлементной основе и для суммирования вычисленных абсолютных значений, устройство дополнительно включает средства запоминания вычисленных абсолютных значений и их сумм, средства анализа указанной компилированной информации, определяющие, сдвинуто ли указанное изображение относительно эталонного изображения, и средства сдвига указанных фрагментов вдоль оси абсцисс и оси ординат. 2 Устройство по п.1, отличающееся тем, что средства анализа дополнительно включают селектор сдвига, формирующий значения сдвигов по оси абсцисс и оси ординат, соответствующие наилучшему совпадению указанного изображения и эталонного изображения. 3. Способ определения линейного сдвига образца относительно номинального положения, включающий сбор данных, соответствующий, по меньшей мере, двум фрагментам изображения, запоминание, по меньшей мере, двух эталонных фрагментов эталонного изображения, соответст вующих указанным фрагментам изображения, и компиляцию информации от указанных фрагментов изображения и эталонных фрагментов, отличающийся тем, что указанные фрагменты представляют в виде двухмерных матриц элементов изображения, а при компиляции вычисляют абсолютные значения разностей между каждым из указанных фрагментов изображения и соответствующим ему эталонным фрагментом на поэлементной основе, запоминают абсолютные значения в средствах памяти, суммируют абсолютные значения и запоминают полученные суммы в средствах памяти, причем дополнительно анализируют указанную компилированную информацию -для определения, сдвинуто ли указанное изображение относительно эталонного изображения, сдвигают указанные фрагменты изображения вдоль оси абсцисс на один элемент изображения, повторяют указанную выше последовательность операций компиляции, анализа и сдвига заранее заданное число раз, сдвигают указанный фрагмент изображения вдоль оси ординат на один элемент изображения и повторяют указанную выше последовательность операций компиляции, анализа, сдвига вдоль оси абсцисс, повторения операций и сдвига вдоль оси ординат заранее заданное число раз. 4. Способ по п.З, отличающийся тем, что при выполнении суммирования суммируют указанные абсолютные значения для первого из указанных по меньшей мере двух фрагментов, суммируют указанные абсолютные значения для каждого элемента изображения первого фрагмента с указанными абсолютными значениями для каждого соответствующего элемента изображения других фрагментов из указанных, по меньшей мере, двух фрагментов и суммируют полученные суммы. 5. Способ по п.З или 4, отличающийся тем, что при выполнении указанной операции анализа сравнивают указанные вычисленные суммы с соответствующими суммами, определенными до выполнения операции сдвига, принимают решение о наилучшем совпадении, если вычисленные суммы не превосходят сумм, определенных до выполнения операции сдвига, запоминают в средствах памяти значения сдвига по оси абсцисс и оси ординат, если принято решение о наилучшем совпадении, запоминают значение наилучшего СМ О со со 1^ см и • цип действий такой же. что и для описанного спо соба определения минимальной суммы абсолютных разностей за исключением того, что при каж 27331 дом сдвиге вдоль оси X и оси Y для каждого фрагмента изображения выполняют суммирование произведений, полученные суммы складывают и регистрируют результат. Когда все сдвиги выполнены, зарегистрированные результаты анализируют, и максимальный результат соответствует сдвигу, при котором достигается наилучшее совмещение характерных особенностей двух фрагментов изображений. Принцип сравнения фрагментов эталонного изображения с двумя фрагментами контролируемого изображения с помощью корреляции, определения минимальной суммы абсолютных разностей или другого метода сравнения может быть использован для любого (большего, чем два) количества фрагментов эталонного изображения и такою ЖР количества сравниваемых фрагментов контролируемого изображения, что обеспечивает высокую точность определения рассовмещения изображений. Изобретение поясняется чертежами, где На фиг.1 представлена система формирования сигналов, соответствующих изображению, выполненная в соответствии с данным изобретением. На фиг 2 представлен объект, сканируемый системой, показанной на фиг.1, На фиг.З представлены некоторые фрагменты эталонного изображения и На фиг. 4 предстаалены элементы процессора обработки изображений в системе, показанной на фиг.1 Предлагаемая система формирования сигналов, соответствующих изображению, может преимуществ енно использоваться s устройстве длн проверки отпечатанных узоров. Например, система 1 может содержать вращающийся барабан 2, который перемещает лист 3 мимо сканера 4. На листе 3 может быть отпечатано множество рисунков, расположенных э виде прямоугольной матрицы. Сканер 4 используют для сканирования листа 3 и формирования соответствующих изображению сигналов, поступающих в блок 5 сбора сигналов изображения, Изображение листа 3 или по меньшей мере его частей поступает в цифровой форме из блока 5 в запоминающее устройство 6. Система 1 также содержит другое запоминающее устройство 7, в KOTopov хранится эталонное изображение листа Два изображения с запоминающих устройств 6 и 7 поступают в процессор 8 обработки изображений, который служит для определения сдвига изображения, поступающего из сканера 4, в одном или обоих взаимно перпендикулярных направлениях. На фиг.2 показана отпечатанная банкнота 9 на листе 3, на которой имеется изображение 10. Для того, чтобы определить, есть ли смещение изображения 10, выбираются три отдельных фрагмента 11, 12, 13 и анализируются так, как будет описано ниже. Три фрагмента могут быть выбраны произвольно, однако предпочтительно выбирать фрагменты, которые содержат хорошо различимые элементы, вытянутые вдоль одной или обеих ортогональных осей X и Y Для нашего примера предполагается, что изображение 10 получено с одного шаблона, например, методом офсетной печати Часто рисунок создается путем наложения нескольких изображений друг на друга, каждое из которых выполняется с помощью различных способов печати В этом случае указанные здесь операции повторяются для каждого изображения таким образом, что можно определить ортогональное смещение каждого из изображений. Желательно, чтобы каждый фрагмент 11, 12, 13 изображения представлял собой двухмерную матрицу элементов изображения В запоминающем устройстве 7 может храниться либо эталонное изображение полностью, либо отдельные фрагменты эталонного изображения, соответствующие фрагментам 11, 12, 13 Эти фрагменты эталонного изображения представлены на фиг 3 в виде трех матриц 14, 15, 16 элементов изображения Каждый элемент матрицы может быть определен его двумя координатами в матрице. Например, элементы изображения в верхнем левом ушу каждой из матриц 14, 15, 16 могуг быть обозначены соответственно как A1V, В11' и C1V Первоначально предполагается, что фрагменты реального изображения 10 точно совпадают с фрагментами эталонного изображения Другими словами, предполагается, что центральный элемент матрицы 14 (заштрихован на фиг 3) совпадает с центральным элементом фрагмента 11 Представленный более подробно на фиг 4 процессор 8 обработки изображений содержит пять счетчикоа 17, 18, 19, 20, 21, схему 22 суммирования, запоминающее устройство 23, компаратор 24 и селектор 25 сдвига Очевидно, что процессор обработки изображений, показанный на фиг 4, предпочтительно представляет собой обычный цифровой компьютер, и входящие е его состав элементы локазаны на фиг.4 в чисто пояснительных цепях. Для того, чтобы определить, есть ли фактический ортогональный сдвиг реального изображения, записанного в заломи нзющем устройстве 6, относительно эталонного изображения, записанного в запоминающем устройстве 7, выполняется следующая повторяемая последовательность действий. Счетчик 17 последовательно указывает схеме 22 суммирования один из фрагментов 14, 15, 16 эталонного изображения В начальный момент времени счетчики 18, 19 установлены в нуль, что указывает на отсутствие сдвига изображения. Счетчики 20 и 21 используются как указатели, указывая схеме 22, какой из элементов матрицы подлежит обработке Когда счетчик 17 указывает на первый фрагмент 14 изображения, схема 22 суммирования получает значения каждого элемента изображения фраї мента 11 и вычисляет абсолютное значение разности значений каждого элемента матриц 11 и 14. Другими словами, схема 22 суммирования вычисляет значения /АН -A11V, /А 12-А 127 и тд. Эти разности затем суммируются и запоминаются в п-ераой позиции массива результатов в запоминающем устройстве 23, а также в ячейке "наилучшего совпадения" того же запоминающего устройства 23 Когда разности значений всех элементов изображения матриц 11 и 14 вычислены и записаны в память, счетчик 17 увеличивает свое содержимое, и весь процесс повторяется для матриц 12, 15, причем разность значений для каждого элемента изображения суммиру 27331 ется с разностью значений для соответствующих элементов матриц 11, 14 Другими словами, для второй группы матриц 12, 15 схема 22 суммирования сначала вычисляет разность B11-BI1', э затем суммирует ее с разностью А11 - А11'. Те же самые вычисления повторяются для всех остальных элементов матрицы 12, 15 по указанию сметков 20, 21. В заключение тот же самый процесс вычислений вновь повторяется для третьей группы матриц 13, 16. Когда все вычисления выполнены, сметчик 18 увеличивает свое содержимое на единицу, указывая на то, что матрицы 14, 15 и 16 эталонного изображения должны быть сдвинуты вдоль оси X на один элемент изображения. Схема 22 суммирования вновь выполняет описанные выше операции, однако на этот раз эталонное изображение сдвинуто таким образом, что вычисляется, например, разность А12-А11' и записывается в память временно, пока не будут выполнены вычисления всех трех групп матриц. После этого компаратор 24 сравнивает полученное значение со значением, вычисленным для случая с нулевым сдвигом матриц Результат сравнения помещается во вторую позицию массива результатов а запоминающем устройстве 22. Если это новое значение удовлетворяет определенному критерию (те. равно или меньше, чем старое значение), то старое значение в ячейке "наилучшего совпадения" в запоминающем устройстве 22 заменяется новым. В случае такой замены величины сдвига вдоль осей X и Y, указываемая счетчиками 18, 19, также запоминается з запоминающем устройстве 22. Затем матрицы 14, 15, 16 вновь сдвигаются, и весь процесс повторяется Три матрицы 14, 15, 16 сдвигаются определенное число раз влево и вправо относительно начального положения. Затем матрицы также сдвигаются вверх и вниз предварительно выбранное число раз. Когда все сдвиги вычисления выполнены, в запоминающем устройстве 22 содержится массив результатов вычислений, полученных в процессе ортогональных сдвигов матриц, а также значение, соответствующее наилучшему совпадению, и величина сдвига вдоль осей X и Y, при котором получается это значение. Эти данные поступают в селектор 25 сдвига, который определяет соответствующее смещение изображения 10 по оси X и по оси Y относительно эталонного изображения. Массив результатов в запоминающем устройстве 22 может служить количественным показателем, который может быть использован для определения уровня достоверности процесса. В варианте, описанном выше, в качестве примера используются три фрагмента изображения. Очевидно, что можно взять любое (более одного) количество фрагментов изображения Кроме того, возможны другие критерии сравнения проверяемого изображения с эталонным без от* ступления от сущности изобретения, определенной в прилагаемой формуле изобретения. 6 Фиг. 1 27331 14 CM* V M l 1 B12 км* ш Ґ Ш 15 &5S' .3 23 22 21 Фиг. 4 Тираж 50 є кз Відкрите акціонерне товариство «Патент» Україна, 88000, м Ужгород, вул. Гагаріна, 101 (03122)3-72-89 (03122)2-57-03 16 C55
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for image processing and method of determination of sample shift in relation to reference target position
Автори англійськоюEisenbart Cristoph, Finkelstein Ira, Macchi Dennis, Panowski Edward
Назва патенту російськоюУстройство для обработки изображений и способ определения линейного сдвига образца относительно номинального положения
Автори російськоюЭйзенбарт Кристоф, Финкельштейн Ира, Макчи Деннис, Панофски Эдвард
МПК / Мітки
МПК: G07D 7/00
Мітки: спосіб, зразка, відносної, зсуву, обробки, пристрій, зображень, лінійного, положення, номінального, визначення
Код посилання
<a href="https://ua.patents.su/6-27331-pristrijj-dlya-obrobki-zobrazhen-ta-sposib-viznachennya-linijjnogo-zsuvu-zrazka-vidnosno-nominalnogo-polozhennya.html" target="_blank" rel="follow" title="База патентів України">Пристрій для обробки зображень та спосіб визначення лінійного зсуву зразка відносно номінального положення</a>
Спосіб обробки високочастотного складеного сигналу при вимірюванні фазового зсуву та пристрій для його здійснення
Номер патенту: 23366
Опубліковано: 31.08.1998
Автор: Огороднійчук Леонід Дмитрович
МПК: G01R 27/28, G01R 27/32, G01R 25/00
Мітки: спосіб, зсуву, фазового, високочастотного, здійснення, сигналу, складеного, пристрій, вимірюванні, обробки
Формула / Реферат:
1. Способ обработки высокочастотного (ВЧ) составного сигнала при измерении фазового сдвига, в соответствии с которым из двухполосного ВЧ составного сигнала выделяют две компоненты одной боковой полосы, принадлежащие разным модулированным ВЧ сигналам, их преобразуют по частоте, выделяют первое напряжение промежуточной частоты (ПЧ), а для измерения фазового сдвига используют первое и второе напряжения ПЧ, отличающийся тем, что из ВЧ составного...
Оптоелектронний вузол матриці для порівняння зображень
Номер патенту: 14221
Опубліковано: 25.04.1997
Автори: Кожем'яко Володимир Прокопович, Натрошвілі Отар Георгійович, Білан Степан Миколайович, Подорожнюк Володимир Андрійович
Мітки: порівняння, зображень, матриці, оптоелектронний, вузол
Формула / Реферат:
Oптоэлектронный узел матрицы для сравнения изображений, содержащий элемент памяти и фотоприемный элемент, оптический вход которого является первым оптическим входом узла, отличающийся тем, что, с целью расширения области применения за счет выполнения новых операций с изображениями, элемент памяти в узле выполнен в виде фототиристора, оптический вход которого является вторым оптическим входом узла, введены первый и второй резисторы, анод...
Пристрій формування кольорових зображень
Номер патенту: 963
Опубліковано: 15.12.1993
Автори: Бурцев Валерій Миколайович, Смирнов Сергій Валерьович, Лук'яненко Павло Григорович, Бурцев Володимир Миколайович, Заіка Михайло Володимирович
МПК: F21V 8/00
Мітки: пристрій, кольорових, формування, зображень
Формула / Реферат:
Формула изобретенияУстройство формирования цветовых изображений, содержащее проецирующую оптическую систему, состоящую из осветителя и объектива, средство изменения спектрального состава излучения, выполненное с возможностью перемещения перпендикулярно оси осветителя, и средство трансформирования изображения, отличающееся тем, что, с целью повышения декоративного эффекта за счет увеличения числа комбинаций цветовых изображений,...
Спосіб розпізнавання симетричності зображень об’єктів і пристрій для його реалізації
Номер патенту: 3741
Опубліковано: 27.12.1994
Автори: Буда Антоніна Георгіївна, КРАСИЛЕНКО ВОЛОДИМИР ГРИГОРОВИЧ, Кожем'яко Володимир Прокопович, Мартинюк Тетяна Борисівна
МПК: G06K 11/00, G06K 9/58, G06K 9/52
Мітки: розпізнавання, реалізації, зображень, спосіб, пристрій, об'єктів, симетричності
Формула / Реферат:
1. Способ распознавания симметричности изображений объектов, включающий формирование светового потока исходного изображения в неподвижной системе координат с первой и второй ортогональными осями, разделение сформированного светового потока на два одинаковых равноинтенсивных световых потока, пространственную модуляцию первого и второго разделенных световых потоков вдоль одноименной координатной оси с симметрией относительно другой...
Спосіб одержання на носіі постійних безпосередньо видимих зображень і носій для його реалізації
Номер патенту: 24319
Опубліковано: 17.07.1998
Автор: Кожушнер Олександр Володимирович
МПК: G03G 13/00
Мітки: постійних, зображень, реалізації, носій, безпосередньо, спосіб, видимих, одержання, носіі
Формула / Реферат:
1. Способ получения на носителе постоянных непосредственно видимых изображений, при котором носитель поштучно подают в электрографическое устройство, отличающийся тем, что носитель подают в электрографическое устройство на технологической подкладке, которую располагают с тыльной стороны носителя, а после получения изображения на носителе удаляют.2. Способ по п.1, отличающийся тем, что в качестве технологической подкладки берут бумагу...
Попередній патент: Очищувач для металографічної друкарської машини
Наступний патент: Система обробки зображень та спосіб її контролю
Випадковий патент: Спосіб лікування серозних доброякісних кістом яєчників у хворих репродуктивного віку