Спосіб розпізнавання симетричності зображень об’єктів і пристрій для його реалізації
Номер патенту: 3741
Опубліковано: 27.12.1994
Автори: Мартинюк Тетяна Борисівна, Буда Антоніна Георгіївна, Кожем'яко Володимир Прокопович, КРАСИЛЕНКО ВОЛОДИМИР ГРИГОРОВИЧ
Формула / Реферат
1. Способ распознавания симметричности изображений объектов, включающий формирование светового потока исходного изображения в неподвижной системе координат с первой и второй ортогональными осями, разделение сформированного светового потока на два одинаковых равноинтенсивных световых потока, пространственную модуляцию первого и второго разделенных световых потоков вдоль одноименной координатной оси с симметрией относительно другой координатной оси, пространственное интегрирование первого и второго модулированных световых потоков в полуплоскостях исходного изображения смежных по отношению соответственно ко второй и первой координатным осям, преобразование интегрированного светового сигнала от каждой полуплоскости изображения в электрический сигнал, сравнение электрических сигналов от смежных полуплоскостей изображения в каждом световом потоке, сдвиг исходного изображения по соответствующей координатной оси до равенства сравниваемых электрических сигналов, отличающийся тем, что размножают разделенные световые потоки на группы из n равноинтенсивных световых потоков (n - -log2Hk; H = max{M, N}; М х N - число элементов разбиения исходного изображения, К - максимальный порядок статических моментов объекта), осуществляют пространственную модуляцию всех световых потоков каждой группы путем последовательной смены k комплектов из n теневых бинарных масок каждый, ось симметрии каждой теневой бинарной маски, параллельной направлению ее прозрачных и непрозрачных полос, совмещают с границей смежных полуплоскостей изображения в данном световом потоке, после преобразования световых сигналов в электрические производят весовое суммирование электрических сигналов для каждой полуплоскости исходного изображения в каждой группе из n световых потоков согласно выражению
, где Фрі - фрагмент исходного изображения в пределах I-й полосы теневой бинарной маски, kI = 1 для прозрачной полосы, kI = 0 для непрозрачной полосы, после чего попарно сравнивают просуммированные сигналы в каждой группе световых потоков, запоминают величину каждого сдвига исходного изображения для каждого из k комплектов теневых бинарных масок, повторяют совокупность всех операций, начиная с пространственной модуляции световых потоков, с помощью второго - k-го комплектов теневых бинарных масок при каждом повороте в пределах от 0 до у исходного изображения на заранее заданный угол вокруг точки, соответствующей равенству сравниваемых электрических сигналов в каждой паре полуплоскостей изображения, полученной при использовании первого комплекта теневых бинарных масок, Принимают решение о наличии у объекта центральной симметрии в случае отсутствия сдвигов исходного изображения для всех значений угла его поворота при использовании второго - k-гo комплектов теневых бинарных масок, принимают решение о наличии у объекта осевой симметрии при наличии сдвигов исходного изображения по одной из его координатных осей и отсутствии сдвигов по другой его координатной оси хотя бы для одного значения угла поворота исходного изображения при использовании второго - k-гo комплектов теневых бинарных масок, принимают решение об отсутствии у объекта симметрии при наличии сдвигов по обеим координатным осям исходного изображения для всех значений угла его поворота при использовании всех k комплектов теневых бинарных масок.
2. Устройство для распознавания симметричности изображений объектов, содержащее первый блок смещения изображений, оптический вход которого является информационным входом устройства, блок управления, первая и вторая группы выходов которого подключены к одноименным группам управляющих входов первого блока смещения изображения, первый и второй формирователи сигналов статических моментов, каждый из которых включает в себя блок вычитания и первую пару оптических преобразователей, выходы которых соединены со входами одноименных фотоприемников, отличающееся тем, что в устройство введены блок поворота изображения, второй блок смещения изображения и первый и второй мультипликаторы светового потока, последовательно размещенные на одной оптической оси с первым блоком смещения изображения, а в каждый формирователь сигналов статических моментов введены блок смены комплектов теневых бинарных масок, вторая - n-я пары оптических преобразователей, вторая - n-я пары фотоприемников, согласующий блок и первый и второй блоки весового суммирования, первый - n-й оптические выходы блока смены комплектов теневых бинарных масок сопряжены со входами соответственно первой - n-й пар оптических преобразователей, выходы оптических преобразователей второй - n-й пар соединены со входами соответствующих фотоприемников, выходы первых и вторых фотоприемников всех пар подключены к соответствующим входам соответственно первого и второго весовых сумматоров, выходы которых соединены с суммирующим и вычитающим входами блока вычитания, выход которого подключен ко входу согласующего блока, выходы согласующих блоков первого и второго формирователей сигналов статических моментов соединены с первой и второй группами управляющих входов блока управления, третья - пятая группа выходов которого подключены соответственно к первой и второй труппам управляющих входов второго блока смещения изображения и управляющим входам блока поворота изображения, первый и второй выходы светоделителя оптически связаны со входами первого и второго мультипликаторов светового потока, первый - n-й выходы которых оптически связаны с одноименными информационными входами блоков смены комплектов теневых бинарных масок первого и второго формирователей сигналов статических моментов, управляющие выходы и управляющие входы блоков смены комплектов теневых бинарных масок первого и второго формирователей сигналов статических моментов подключены соответственно к первому и второму управляющим входам и первой и второй группам управляющих выходов блока управления, вход запуска, установочные входы и выходы которого являются одноименными входами и выходами устройства.
Текст
Изобретение относится к области автоматики и вычислительной техники и может быть использовано для обработки изображений в системах управления и системах те хнического зрения промышленных роботов. Наиболее близким к предлагаемому является способ распознавания геометрических фигур [1], основанный на сканировании и преобразовании изображений фигуры в последовательности широтно-модулированных импульсов за счет обеспечения инвариантности при аффинных преобразователях распознаваемой фигуры сканируют изображение фигуры при непрерывном изменении угла сканирования, преобразуют для каждого угла сканирования последовательность широтно-импульсных сигналов в интегральные сигналы и выделяют в интегральных сигналах последовательности экстремальных уровней так, что для каждого экстремального уровня интегральных сигналов формируют сигнал временного отсчета, именуемого в дальнейшем точкой координатной привязки, формируют результирующие сигналы, пропорциональные сигналам временного отсчета и обратно пропорциональные соответствующим экстремальным уровням интегральных сигналов, и по полученной последовательности результирующих сигналов судят о распознаваемой геометрической фигуре. Однако известный способ имеет ограниченную область применения из-за частичного выделения класса геометрических фигур, т. к. используемая эталонная последовательность способа позволяет учитывать лишь тип многоугольника, но не учитывать выделяемые свойства для преобразований относительно центра и оси. Кроме того, распознавание геометрических фигур ведется последовательным сканированием кадра и изменением угла сканатора, что вызывает сложности технической реализации способа и приводит к увеличению временных затрат на обработку. Наиболее близким по технической сущности к заявляемому является устройство для центрирования изображений [2], содержащее блок проецирования, блоки формирования сигналов статических моментов изображений, блок управления, светоделительный блок, вход которого оптически связан с выходом блока проецирования, а выходы оптически связаны с входом блоков формирования сигналов статических моментов изображений, каждый из которых содержит дифференциальный усилитель и оптически связанные оптический фильтр с линейным коэффициентом пропускания, оптический преобразователь, выполненный в виде 2-х пирамидальных фоконов, и фотоприемники, выходы которых подключены к входам дифференциального усилителя, выходы дифференциальных усилителей блоков формирования сигналов статических моментов изображений подключены к входам сигналов рассогласования блока управления, выходы которых соединены с управляющими входами блока проецирования. Однако для этого устройства характерны низкая точность, связанная с применением фильтра с коэффициентом пропускания, линейно зависящим от размера апертуры и ограниченные функциональные возможности, т.к. устройство не позволяет селектировать изображения по признакам симметричности. В основу изобретения поставлена задача создать способ распознавания симметричности изображения объектов, в котором путем введения новых операций используются статические моменты более высоких порядков и формируются признаки, позволяющие принимать три решения о наличии у распознаваемых изображений: центра симметрии, осевой симметрии и несимметричности изображений, что позволяет классифицировать изображения по классам. Изобретением также решается задача создания устройства для реализации предложенного способа, причем в устройстве путем введения новых блоков и разработки блока управления обеспечивается выполнение операций повторного центрирования и вследствие этого формируются три результирующи х сигнала, соответствующие трем принимаемым решениям; о наличии у распознаваемого изображения центра симметрии, о наличии у распознаваемого изображения оси симметрии, об отсутствии у распознаваемого изображения симметрии. Поставленная задача решается тем, что в способе распознавания симметричности изображений объектов, включающем формирование светового потока исходного изображения в неподвижной системе координат с первой и второй ортогональными осями, разделение сформированного светового потока на два одинаковых равно-интенсивных световых потока, пространственную модуляцию первого и второго разделенных световы х потоков вдоль одноименной координатной оси с симметрией относительно другой координатной оси, пространственное интегрирование первого и второго модулированных световых потоков в полуплоскостях исходного изображения смежных по отношению соответственно ко второй и первой координатным осям, преобразование интегрированного светового сигнала от каждой полуплоскости изображения в электрический сигнал, сравнение электрических сигналов от смежных полуплоскостей изображения в каждом световом потоке, сдвиг исходного изображения по соответствующей координатной оси до равенства сравниваемых электрических сигналов, согласно изобретению, размножают разделенные световые потоки на группы из n равноинтенсивных световых потоков (n= log2Hk; Н = max{M, N}; MxN - число элементов разбиения исходного изображения; К максимальный порядок статических моментов объекта), осуществляют пространственную модуляцию всех световых потоков каждой группы путем последовательной смены К комплектов из n теневых бинарных масок каждый, ось симметрии каждой теневой бинарной маски, параллельной направлению ее прозрачных и непрозрачных полос, совмещают с границей смежных полуплоскостей изображения в данном световом потоке, после преобразования световых сигналов в электрические производят весовое суммирование электрических сигналов для каждой полуплоскости исходного изображения в каждой группе из n световых потоков, согласно выражению в каждой группе из n световых потоков, согласно выражению , где Ф рі - фрагмент исходного изображения в пределах 1-й полосы теневой бинарной маски, KI = 1 для прозрачной полосы, КI=0 для непрозрачной полосы, после чего попарно сравнивают просуммированные сигналы в каждой группе световых потоков, запоминают величину каждого сдвига исходного изображения для каждого из К комплектов теневых бинарных масок, повторяют совокупность всех операций, начиная с пространственной модуляции световых потоков с помощью второго -k-го комплектов теневых бинарных масок при каждом повороте в пределах от 0 до p / 2 исходного изображения на заранее заданный угол вокруг точки, соответствующей равенству сравниваемых электрических сигналов в каждой паре полуплоскостей изображения, полученной при использовании первого комплекта теневых бинарных масок, принимают решение о наличии у объекта центральной симметрии в случае отсутствия сдвигов исходного изображения для всех значений угла его поворота при использовании второго - Кго комплектов теневых бинарных масок, принимают решение о наличии у объекта осевой симметрии при наличии сдвигов исходного изображения по одной из его координатных осей и отсутствии сдвигов по другой его координатной оси, хотя бы для одного значения угла поворота исходного изображения при использовании второго - К-го комплектов теневых бинарных масок, принимают решение об отсутствии у объекта симметрии при наличии сдвигов по обеим координатным осям исходного изображения для всех значений угла его поворота при использовании всех К комплектов теневых бинарных масок. Предложенный способ обладает более широкими функциональными возможностями. Так, в прототипе выделяется лишь ограниченная часть геометрических фигур (треугольник, четырехугольник, пятиугольник и т.д.), т.е. к классу фигуры относят изображения, зависящие от числа углов многоугольника. В заявляемом способе для любого многоугольника независимо от числа и типа углов можно определить признак наличия и отсутствия симметрии и отнести его к тому или иному классу. Кроме того, по сравнению с прототипом, способ позволяет увеличить быстродействие, т.к. применение последовательного сканирования кадра и изменения угла сканатора приводят к дополнительным затратам на обработку. Следовательно, быстродействие способа по прототипу значительно снизится, если необходимо выделить класс многоугольника с n-числом сторон. Для принятия правильного решения о наличии одного из трех признаков за цикл операции распознавания необязательно применение большого числа комплектов масок (например к), т.к. для получения положительного эффекта, достаточно использовать лишь несколько комплектов, по числу не превышающих 3-4-х. Способ не критичен к небольшим размерностям изображения и влиянию возмущающи х факторов при колебании коэффициента передачи до ±5% . Изобретательская задача также решается тем, что в устройство для распознавания симметричности изображений объектов, содержащее первый блок смещения изображений, оптический вход которого является информационным входом устройства, блок управления, первая и вторая группы выходов которого подключены к одноименным группам управляющих вxодов первого блока смещения изображения, первый и второй формирователи сигналов статических моментов, каждый из которых включает в себя блок вычитания и первую пару оптических преобразователей, выходы которых соединены со входами одноименных фотоприемников, согласно изобретению дополнительна введены блок поворота изображений, второй блок смещения изображения и первый и второй мультипликаторы светового потока, последовательно размещенные на одной оптической оси с первым блоком смещения изображения, а в каждый формирователь сигналов статических моментов введены блок смены комплектов теневых бинарных масок, вторая - n-я пара оптических преобразователей, вторая - n-я пара фотоприемников. согласующий блок и первый и второй блоки весового суммирования, первый - n-й оптические выходы блока смены комплектов теневых бинарных масок сопряжены со входами соответственно первой - n-й пар оптических преобразователей, выходы оптических преобразователей второй - n-й пар соединены со входами соответствующи х фотоприемников, выходы первых и вторых фотоприемников всех пар подключены к соответствующим входам соответственно первого и второго весовых сумматоров, выходы которых соединены с суммирующим и вычитающим входами блока вычитания, выход которого подключен ко входу согласующего блока, выходы согласующи х блоков первого и второго формирователей сигналов статических моментов соединены с первой и второй группами управляющих входов блока управления, третья - пятая группа выходов которого подключены соответственно к первой и второй группам управляющих входов второго блока смещения изображения и управляющим входам блока поворота изображения, первый и второй выходы светоделителя оптически связаны со входами первого и второго мультипликаторов светового потока, первый - nй выходы которых оптически связаны с одноименными информационными входами блоков смены комплектов теневых бинарных масок первого и второго формирователей сигналов статических моментов, управляющие выходы и управляющие входы блоков смены комплектов теневых бинарных масок первого и второго формирователей сигналов статических моментов подключены соответственно к первому и второму управляющим входам, первой и второй группам управляющих выходов блока управления, вход запуска, установочные входы и выходы которого являются одноименными входами и выходами устройства. Сущность заявляемого устройства состоит в том, что оно обеспечивает выполнение действий предлагаемым способом. Для осуществления операций центрирования относительно ортогональных осей Х и Y используются соответственно первый и второй формирователи сигналов статических моментов частей изображения, в которых световые сигналы статических моментов частей изображения формируются оптическим преобразованием светового потока (разделение, пространственная модуляция интенсивности и ее интегрирование) оптическими блоками. Пространственная модуляция интенсивности фрагментов изображения по весам координат в условных единицах осуществляется с помощью бинарных теневых масок. Формирование частей изображения в смежных полуплоскостях выполняется оптическими преобразователями с последующим преобразованием световых сигналов в электрические за счет фотоприемных устройств. Определение взвешенных сумм интенсивностей изображения, соответствующи х определению статических моментов в смежных полуплоскостях выполняется аналоговыми сумматорами со взвешенным суммированием. Информация о равенстве статических моментов частей изображения или несоответствия этого равенства расшифровывается и кодируется состоянием сигналов на выходах первого и второго формирователей сигналов статических моментов частей изображения первым и вторым согласующими блоками и представляется в каждом первым и вторым сигналами кодирующего двухразрядного слова. Уравновешивание статических моментов ведется по сигналам блока управления и представляется кодами на его выходах для смещения изображения вдоль осей Х и Y при использовании первого комплекта масок первым блоком смещения, при использовании второго - k-го комплектов масок - вторым блоком смещения. Смена второго и k-го комплектов теневых бинарных масок в первом и втором формирователях сигналов статических моментов осуществляется по сигналам блока управления на управляющие входы блоков смены комплектов теневых бинарных масок. Поворот изображения после смены второго и k-го комплектов масок осуществляется с дискретным шагом по сигналам блока управления на его выходе. Блок управления осуществляет запуск устройства, смены числа комплектов масок, поворот изображения, фиксирует и анализирует величины смещений относительно ортогональных осей Х и Y, формирует три результирующи х сигнала, выделяя из них один, соответствующий признаку наличия симметрии исследуемого изображения относительно центра, оси или несимметричности, а также сигнал "Конец операции распознавания". На фиг. 1 приведена иллюстрация исходной ориентации несимметричного изображения объекта с его "центром-образом", и связанное с ним поле зрения; на фиг. 2 -центрально-симметричное изображение объекта с "центром-образом" и связанное с ним поле зрения; на фиг. 3 - осесимметричного изображения объекта с "центром-образом" и связанное с ним поле зрения; на фиг. 4 - несимметричного изображения объекта с "центром-образом" и связанное с ним поле зрения; на фиг. 5 - различные изображения объектов с признаками симметрии относительно центра и оси; на фиг. 6 - блок-схема устройства, реализующе го способ; на фиг. 7 функциональная схема первого формирователя сигналов статических моментов; на фиг. 8 - вариант выполнения согласующего блока; на фиг. 9 -блок-схема алгоритма функционирования устройства; на фиг. 10 - вариант выполнения функциональной схемы устройства микропрограммного управления блока управления; на фиг. 11 вариант выполнения функциональной схемы устройства фиксации симметричных объектов блока управления; на фиг. 12 - пример разложения симметричного изображения объекта относительно оси V по фрагментам, полученным после модулирования первым комплектом масок в первом формирователе сигналов статических моментов; на фи г. 13 - пример разложения симметричного изображения объекта относительно оси X' по фрагментам. полученным после модулирования первым комплектом масок во втором формирователе сигналов статических моментов; на фиг. 14 - пример разложения симметричного изображения объекта относительно оси Y' по фрагментам, полученным при модулировании вторым комплектом; на фиг. 15- пример разложения симметричного изображения объекта относительно оси X' по фрагментам, полученным после модулирования вторым комплектом масок во втором формирователе сигналов статических моментов. Заявляемое устройство для реализации предложенного способа (фиг. 5) содержит первый блок смещения (БС) 1 с проецирующей оптикой, блок поворота изображений (БПИ) 2, второй блок смещения (БС) 3, первый и второй мультипликаторы (М) 4, первый и второй формирователи сигналов статических моментов частей изображений (ФССМ) 5 и 6, первый и второй блоки смены бинарных масок (БСМ) 7 и 8, первый и второй согласующие блоки 9 и 10. Первым входом устройства является оптический вход первого блока смещения, выход которого оптически соединен с входом блока поворота изображения 2, выход блока поворота изображения 2 оптически связан с входом второго блока смещения 3, выход второго блока смещения 3 оптически согласован и связан с входами первого и второго мультипликаторов 4, которые последовательно размещены на одной оптической оси с первым блоком смещения и оптически связаны соответственно с первым и вторым выходами светоделителя. Первый - n-й выходы первого и второго мультипликаторов оптически связаны с одноименными информационными входами блоков смены комплектов теневых бинарных масок 7 и 8 соответственно в формирователях сигналов статических моментов 5 и 6. Управляющие выходы блоков смены комплектов теневых бинарных масок 7 и 8 первого и второго формирователей сигналов статических моментов 5 и 6, соответственно, подключены к первому 12 и второму 13 управляющим входам блока управления 11. Выходы согласующих блоков 9 и 10 первого и второго формирователей 5 и 6 соединены с первой 14 и 15 и второй 16 и 17 группами управляющих входов блока управления 11. Вход запуска 18, установочные входы 19, 20, 21, 22 соответственно задания равномерности матрицы анализируемого изображения Н = max {М, N } по столбцам N, строкам М, количество К комплектов масок и числа поворотов L изображения, являются одноименными входами устройства. 1 и 2 группы управляющих выходов 23 блока управления 11 подключены соответственно к управляющим входам 24 и 25 блоков смены комплектов теневых бинарных масок 7 и 8. Первая и вторая группы выходов 26, 27 блока управления 11 подключены к одноименным группам управляющих входов первого блока смещения 1. Третья-пятая группы выходов 28, 29, 30 блока управления 11 подключены к первой и второй группам управляющих входов второго блока смещения 3 и управляющим входом блока поворота 2. Первый-четвертый выходы 31-34 блока управления 11 являются выходами устройства. При этом первый выход 31 является выходом результирующего сигнала, по которому принимается решение о наличии центральной симметрии; второй выход 32 - вы ходом результирующего си гнала, по которому принимается решение о наличии осевой симметрии; третий выход 33 - вы ходом результирующего сигнала, по которому принимается решение о наличии несимметричного изображения; выход 34 - вы ходом сигнала "Конец операции распознавания". Первый формирователь сигналов статических моментов (ФССМ) 5 (фиг. 6) содержит блок смены комплектов теневых бинарных масок (БСМ) 7, в который входит дешифратор (Д) 35. К электромагнитов (Э 1 - Эк ) 361...36к , соответствующи х К комплекту теневых бинарных масок, используемых при обработке. Входы дешифратора 35 являются входами блока смены комплектов теневых бинарных масок 7. К выходов де шифратора подключены к соответствующим управляющим входам (в частности, к обмоткам) К электромагнитов 361...36к таким образом, что 1-ый выход дешифратора 35 соединен с управляющим входом (обмоткой) 1-го электромагнита 36; содержащего 1-ю штангу с прозрачной 1-й подложкой для крепления 1-го комплекта теневых бинарных масок (КТБМ) 371-37n. А каждый 1-й комплект установлен на 1-й прозрачной подложке, на которой закреплены nтеневых бинарных масок 371-37n с двумя коэффициентами пропускания. Причем один конец 1-й прозрачной подложки содержит подвижный контакт (ПК) 38, вывод которого соединен с шиной нулевого потенциала устройства, замыкаемый неподвижным контактом (НК) 39, вывод которого соединен с первым выводом резистора (R)40 и является выходом блока смены комплектов бинарных теневых масок 7 первого формирователя сигналов статических 5. первую - n пары оптических преобразователей (ОП) 411-41n, в виде 2n пирамидальных фоконов, первую - n пары фотоприемников (ФП), состоящие из первых (нечетных) 421,1; 422,1 ; 423,1; ...; 42n,1 и вторых (четных) 421,2 и; 422,2; 423,2;...; 42 n,2 фо топриемников (где вторая нижняя цифра групп фотоприемников 1 обозначает нечетную гр уппу, 2 - четную гр уппу), первый и второй весовые сумматоры (ВС) 43, 44, блок вычитания (БВ) 45 и согласующий блок (СБ) 9. Первый согласующий блок 9 (фиг. 8) содержит первый 46 и второй 47 компараторы (К), элемент неравнозначности 48, причем первый неинвертируемый вход первого компаратора 46 и второй инвертирующий вход второго компаратора 47 подключен к входу согласующего блока 9, второй инвертирующий вход первого компаратора 46 соединен с источником первого опорного напряжения +U1, а второй неинвертирующий вход второго компаратора 47 соединен с источником второго опорного напряжения -U2, выход первого компаратора 46 соединен с первым входом элемента НЕРАВНОЗНАЧНОСТИ 48, выход второго компаратора 47 соединен со вторым входом элемента НЕРАВНОЗНАЧНОСТИ 48, а также является выходом старшего разряда А логического сигнала согласующего блока, выход элемента НЕРАВ-НОЗНАЧНОСТИ 48 является выходом младшего разряда логического сигнала согласующего блока 9. Согласующий блок 9, как и блок смены комплектов теневых бинарных масок 7, входит в стр уктуру формирователя сигналов статических моментов 5 (см, фиг. 7), а на фиг. 6 указанные блоки обведены штриховым контуром. На фиг. 9 представлен алгоритм функционирования блока управления 9, а на фиг. 10, 11 - функциональные схемы соответственно устройства 49 микропрограммного управления (УМПУ) и устройства фиксации симметричных объектов (УФСО) 50 блока управления 9 соответственно. Устройство микропрограммного управления (УМПУ) (фиг. 10) содержит программируемое ПЗУ 51, регистр 52, дешифраторы 53...56, генератор тактовых импульсов ГTИ 57, триггер 58, логический элемент 2И-ИЛИ-НЕ 59, элемент НЕ 60, элементы 2И-НЕ 61, 62, 63, элемент И 64. Причем вход 18 запуска устройства подключен к Sвходу триггера 58, инверсный выход которого является выходом 34 "Конец операции распознавания" блока управления 11, информационные входы 12, 13, 15, 17, 14, 16 и информационные входы 65, 66 являются входами соответствующи х логических сигналов Х1 ,...,Х8 блока управления 11, а выходы дешифраторов 53,...,56 являются выходами 67....,84 устройства микропрограммного управления 49. Кроме того, адресные входы ПЗУ 51 подключены к соответствующим выходам элемента 2 И-НЕ 65, а информационные выходы - к входам регистра 52, вход синхронизации которого подключен к выходу элемента И 64, входы которого соединены с прямым выходом триггера 58 и выходом ГТИ 57. Девять первых выходов регистра 52 соединены с тремя входами дешифраторов 53, 54, 55 соответственно, выходы регистра 52 с десятого по тринадцатый подключены к входам дешифратора 56, выходы регистра 52 с четырнадцатого по двадцать третий - к первым входам элементов 2 ИНЕ 61, 62 соответственно, вторые входы которых соединены с выходами элементов 2 И-ИЛИ-НЕ 59 и НЕ 60 соответственно. Выходы элементов 2 И-НЕ 61, 62 подключены к соответствующим входам элемента 2 И-НЕ 63, а выходы дешифратора 56 к первым входам элемента 2 И-ИЛИ-НЕ 59, вторые входы которых соединены с входами 12, 13, 15, 17, 14, 16, 65, 66 устройства 49, Причем, выход Yk де шифратора 53 соединен с R-входом триггера 58, а входы Е0, Е1 все х деши фраторов 53,...,56 подключены к шине нулевого потенциала устройства. Устройство 50 фиксации симметричных объектов (УФСО) (см. фиг. 11) содержит счетчики 85,...,90, дешифратор 91, ОЗУ 921,...,92 к-1, 931...,93 к-1, схемы сравнения 94, 95, триггеры 96, 97, 98, элементы ИЛИ-НЕ 99, И 100, элемент НЕРАВНОЗНАЧНОСТИ 101, элементы НЕ 102, 103 и 2(к-1) элементов И 104. Причем информационные входы счетчиков 85,...,90 соединены соответственно с группами входов 19, 20, 21, 22 блока управления 11, а информационные выходы - с гр уппами выходов 23, 26, 27, 28, 29, 30 блока управления 11 соответственно. Выходы РЕ разрешения параллельной загрузки счетчиков 85,90 соответственно подключены к входам 73,70 устройства 50, вычитающие входы - к входам 81,72 устройства 50, входы обнуления - к входу 71 блока управления 11, а выходы " £ 0 " через элементы НЕ 102, 103 соединены с входами 65, 66 устройства 49 соответственно. Кроме того, вход 67 устройства 50 соединен с входами обнуления счетчиков 86. 87, вход 68 - с входами РЕ счетчиков 87, 89, входы 69, 71, 74, 75 - с суммирующими входами счетчиков 87, 89, 86, 88 соответственно, входы 75, 77, 80, 82 -с вычитающими входами счетчиков 87, 89, 86, 88 соответственно, вход 78 с входами обнуления счетчиков 88, 89, вход 79 - с входами РЕ счетчиков 86, 88. Причем информационные выходы счетчика 85 соединены также с входами дешифратора 91, информационные выходы счетчиков 88, 89 - с информационными входами ОЗУ 921.....92к-1 и ОЗУ 931....,93к-1, соответственно, информационные выходы счетчиков 90 - с адресными входами ОЗУ 92 1,....92k-1 , и 931...93к-1, а выходы дешифратора 91 через элементы И 104 соединены с входами CS выбора кристалла соответствующи х ОЗУ 921...92к-1, 93....,93 к-1, входы WE разрешения записи которых подключены к входу 83 устройства 50. Выходы ОЗУ 921....,92к-1 подключены к соответствующим входам схемы сравнения 94, выходы ОЗУ 931,...,93к-1 - к соответствующим входам схемы сравнения 95, R-входы триггеров 96, 97, 98 подключены к входу 84 устройства 50, S-входы триггеров 96, 97 - к выходам схем сравнения 94, 95 соответственно. Прямые выходы триггеров 96, 97 соединены с входами элементов ИЛИ-НЕ 99 и 100, НЕРАВНОЗНАЧНОСТИ 101, S-вход триггера 98 соединен с выходом элемента НЕРАВНОЗНАЧНОСТИ 101, а прямой выход триггера 98 - с выходом блока 32 управления 11, выходы 31, 33 соединены с выходами элементов И 101 и ИЛИ-НЕ 99 соответственно. Устройство работает следующим образом. Запуск устройства осуществляется по входу 18. По шинам данных на входы 19, 20, 21, 22 устройства подают исходные данные величин соответственно: N (количество столбцов), М (количество строк), L (число поворотов изображения), k (число комплектов масок), которые в дальнейшем используются для выполнения операции распознавания симметричных изображений объектов. Первый блок смещения 1 с проецирующей оптикой формирует световой поток обрабатываемого изображения исходной ориентации с распределением яркости f(x,y), который с его выхода пропускается по входам через блок поворота 2 изображений и второй блок смещения 3, затем поступает на вход мультипликатора 4. Мультипликатор 4 размножает и разделяет входное изображение по двум каналам обработки по первому и второму n-выходам, которые с n-выходов первого и второго мультипликаторов 4 поступают на n-входы 5 и 6 формирователей сигналов статических моментов частей изображения. Первоначально в формирователях 5 и 6 выставлены комплекты масок, адреса которых фиксируются блоком управления 11 по входам 12 и 13 для формирования статических моментов первого порядка m 10 в формирователе 5 и m 01 - в формирователе 6. Формирователь 5 формирует и сравнивает сигналы статических моментов частей изображения в смежных полуплоскостях х' 0` относительно оси Y', а формирователь 6 - в полуплоскостях у'0` то на выходе блока 9 представляется код 11, соответствующий сдвигу изображения вправо вдоль оси X, аналогично, неравенство IIm 10II x`0` - представляется кодом 01, что соответствует сдвигу изображения влево вдоль оси Y. В случае равенства ІІm 10 II x`0` на выходе согласующего блока 9 представлен код 00, что соответствует центрированному положению изображения. Таким образом, на выходе согласующего блока 9 формируются два сигнала, которые являются первым и вторым сигналами кодирующего двухразрядного слова, поступающими по группе выходов согласующего блока 9 на первую гр уппу входов 14 и 15 блока управления 11 соответственно. Аналогично, на выходе согласующего блока 10 формируются двухразрядные коды, несущие информацию о выравнивании статических моментов Iim 01II y`0`, поступающие по гр уппе выходов согласующего блока 10 на вторую гр уппу входов 16 и 17 блока управления 11 соответственно. Уравновешивание статических моментов первого порядка осуществляется за счет первого блока смещения 1, причем коды на смещение вдоль Х и Y будут подаваться соответственно по n-разрядной и m-разрядной шинам, первой и 2-й группам управляющих выходов 26 и 27 от блока управления 11. Состояние этих адресов фиксируется и запоминается в блоке управления 11. После того, как в формирователях 5 и 6 будет выполнено первичное центрирование, блок управления 11 зафиксирует и запомнит координаты центра тяжести изображения А1(х1,у1) и будет использовать в дальнейшем эту точку, как точку координатной привязки, для определения последующи х смещений относительно Х и Y при повторных центрированиях по статическим моментам более высоких порядков. Итак, когда первичное центрирование осуществлено, т.е. блоком управления 11 зафиксирована в памяти т. А1(х1 ,у1) по 1 и 2-й группам управляющих вы ходов 23 блока управления 9 по кразрядным шинам логических сигналов на входы блоков смены теневых бинарных масок 7, 8 поступает информация в виде логического кода. По соответствующему адресу, поступающему на управляющие входы блоков 7 и 8 на его выходах по входам 24 и 25 формирователей 5 и 6 осуществляется выдвижение соответствующего комплекта теневых бинарных масок 371 – 37n с функцией пропускания, которая соответствуе т порядку статического момента, формируемого в данный момент формирователями 5 и 6. Каждый этап завершения центрирования (первичного и повторных) буде т сопровождаться изменением кода в блоке управления 11, поступающим на входы блоков смены теневых бинарных масок 7, 8 для осуществления смены того или иного комплекта масок, Второй этап - вторичное центрирование - осуществляется при выставленном втором комплекте масок 371 – 37n блоками 7 и 8, необходимых для формирования статических моментов IIm 20II x`0` и IIm 02II y`0` соответственно в формирователях 5 и 6. После смены первого комплекта масок в формирователях 5 и 6, фиксируемого соответственно по входам 12 и 13 блока управления 11 аналогично описанному выше, появятся сигналы U и U1 сравнения статических моментов IIm 20II x`0` и IIm 02II y`0`, которые на выходах соответствующи х согласующи х блоков 9 и 10 опять будут формировать по два сигнала, соответствующи х двухразрядному слову и несущи х информацию на выполнение конкретных действий (сдвиги или фиксация центрированного положения) блоком управления 11. Выравнивание моментов m 20 и m 02 соответственно в формирователях 5 и 6, осуществляется вторым блоком смещения 3, сигналы на который подаются соответственно по n-разрядной и m-разрядной шинам блока управления 9. Т.е. по четвертой группе управляющих выходов 28 блока управления 11 производится выравнивание статических моментов IIm a 0II x ` 0` в формирователе 5, а по пятой группе управляющих вы ходов 29 блока управления 11 производится выравнивание статических моментов IIm b0 II y`0 ` в формирователе 6. Первый 1 и второй 3 блоки смещения принимают по два кода, один по первому управляющему входу - на смещение вдоль оси х, другой по второму управляющему входу - вдоль оси у. В качестве блоков смещения 1 и 3 может быть использовано устройство для преобразования изображений (А.с. № 1408444, БИ №25, 1988). По достижению вторичного центрирования происходит фиксация и запоминание: 1) второго комплекта масок, 2) состояния равенства моментов IIm 20II x`0`; IIm 20II y`0` 3) величины смещений Dx 1 ; Dy 1 относительно точки координатной привязки A(x1 ,y1). Затем для этого же комплекта (второго) масок относительно А(х1,у1) по 1-разрядной шине третьей группы выходов 30 блока управления 11с шагом с точностью до дискрета Dj = j / 2 ( a - число поворотов изображения, необходимых для его анализа, 0 £ j £ p / 2 будет формироваться текущий код, необходимый для осуществления a -числа поворотов блоком поворота изображений 2. В качестве блока поворота изображений 2 может быть использовано устройство для поворота изображений (А.с. № 1348871, БИ № 40, 1987). Для каждого 1-го шага поворота Dj1 ведется поиск (сдвиги по осям х и у) по выравниванию моментов [( ) ( ) ] [(IIm 20II x`
ДивитисяДодаткова інформація
Назва патенту англійськоюRecognition method for image symmetry of objects and device for its realization
Автори англійськоюKozhemyako Volodymyr Prokopovych, Krasylenko Volodymyr Hryhorovych, Martyniuk Tetiana Borysivna, Buda Antonina Heorhiivna
Назва патенту російськоюСпособ распознавания симметричности изображений объектов и устройство для его реализации
Автори російськоюКожемяко Владимир Прокофьевич, Красиленко Владимир Григорьевич, Мартынюк Татьяна Борисовна, Буда Антонина Георгиевна
МПК / Мітки
МПК: G06K 11/00, G06K 9/58, G06K 9/52
Мітки: розпізнавання, зображень, об'єктів, симетричності, пристрій, спосіб, реалізації
Код посилання
<a href="https://ua.patents.su/27-3741-sposib-rozpiznavannya-simetrichnosti-zobrazhen-obehktiv-i-pristrijj-dlya-jjogo-realizaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб розпізнавання симетричності зображень об’єктів і пристрій для його реалізації</a>
Пристрій для апертурної корекції зображень
Номер патенту: 2802
Опубліковано: 26.12.1994
Автор: Єлманов Сергій Олександрович
МПК: G06K 9/40
Мітки: пристрій, апертурної, зображень, корекції
Формула / Реферат:
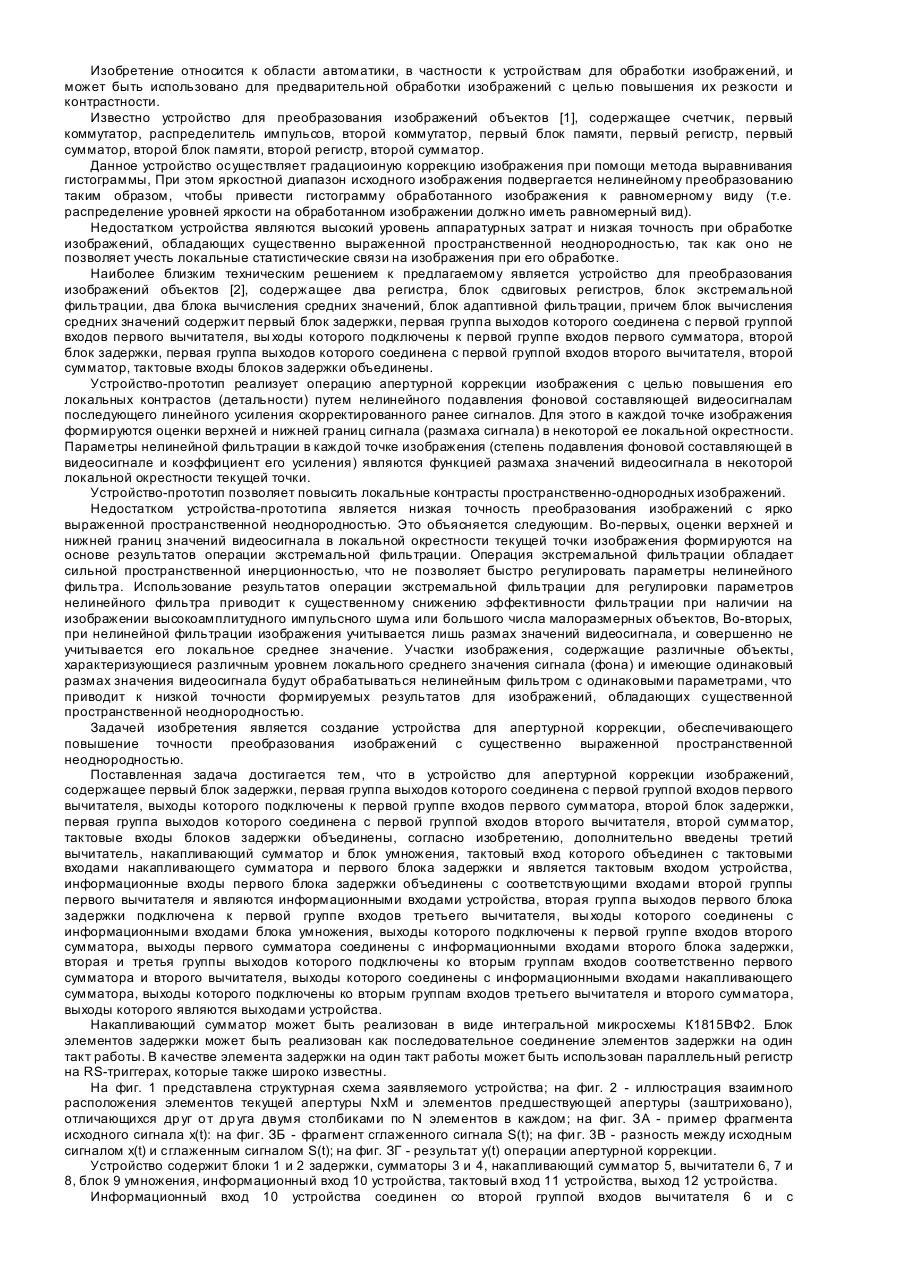
Устройство для апертурной коррекции изображений, содержащее первый блок задержки, первая группа выходов которого соединена с первой группой входов первого вычитателя, выходы которого подключены к первой группе входов первого сумматора, второй блок задержки, первая группа выходов которогосоединена с первой группой входов второго вычитателя, второй сумматор, тактовые входы блоков задержки объединены, отличающееся тем, что в устройство введены...
Оптоелектронний вузел матриці для порівняння зображень

Номер патенту: 2993
Опубліковано: 26.12.1994
Автори: Кожем'яко Володимир Прокопович, Кнаб Олег Дмитрович, Колісницький Олег Констянтинович, КРАСИЛЕНКО ВОЛОДИМИР ГРИГОРОВИЧ
МПК: G02B 27/00, G06C 9/00
Мітки: матриці, порівняння, вузел, зображень, оптоелектронний
Формула / Реферат:
Оптоэлектронный узел матрицы для сравнения изображений, содержащий два фоточувствительных элемента, два резистора, источник питания, отличающийся тем, что в него введены два полевых транзистора. два светодиода, а первый и второй фоточувствительные элементы выполнены в виде первого и второго биспин-приборов соответственно, оптические входы которых являются соответственно прямым м инверсным оптическими входами узла, омические контакты...
Пристрій для формування залишків по модулю
Номер патенту: 612
Опубліковано: 15.12.1993
Автор: Черкаський Микола Вячеславович
МПК: H03M 7/14
Мітки: модулю, пристрій, залишків, формування
Формула / Реферат:
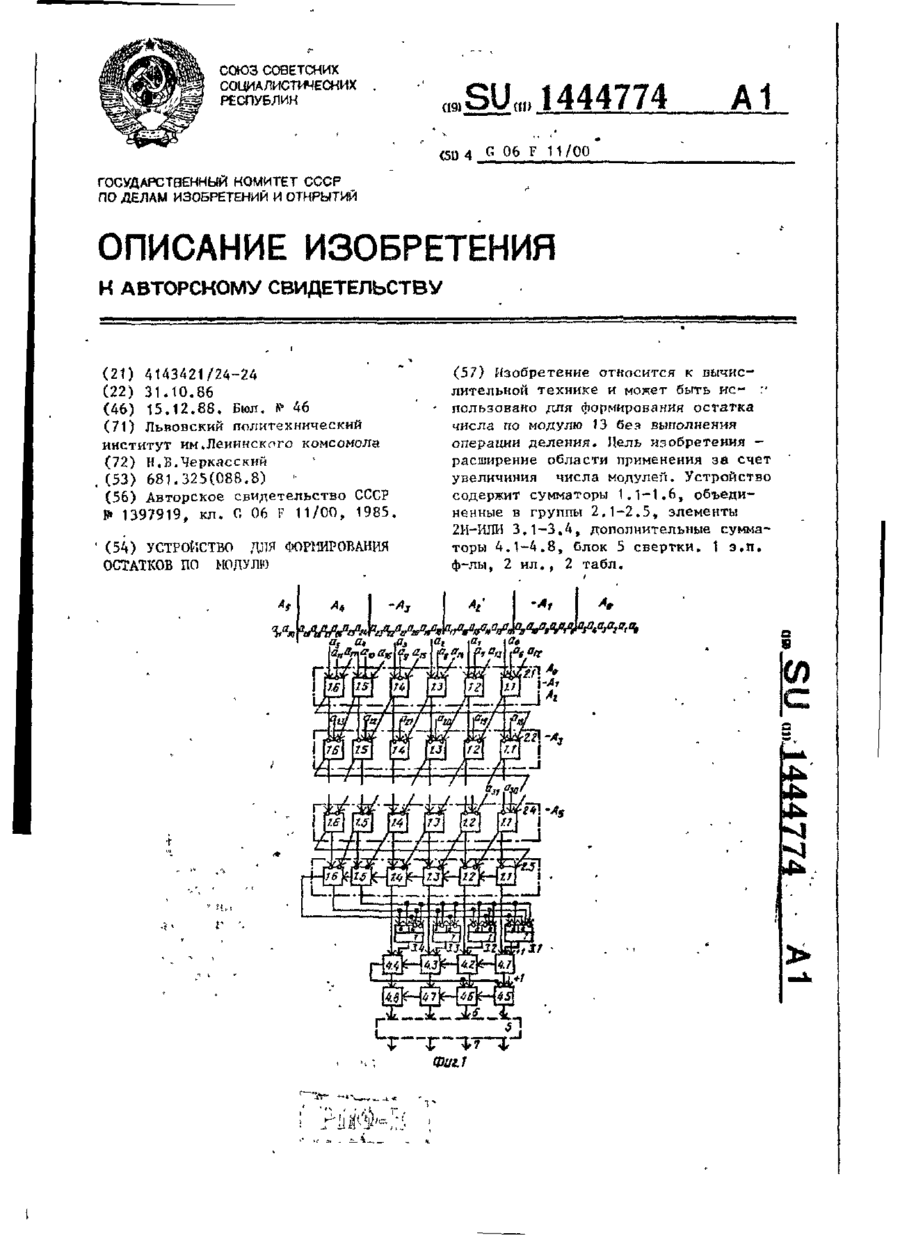
Формула изобретения1. Устройство для формирования остатков по модулю, содержащее (1-1) групп одноразрядных сумматоров (1= n/q, где n - разрядность числа, q - число сумматоров в группах) и блок свертки, причем прямые входы первого слагаемого одноразрядных сумматоров і-й группы (I = 1 - 1 - 1) соединены с входами соответствующих разрядов (і+1)-й группы информационного входа устройства, выход переноса к-го одноразрядного сумматора і-й...
Пристрій для формування залишків по модулю
Номер патенту: 614
Опубліковано: 15.12.1993
Автор: Черкаський Микола Вячеславович
МПК: G06F 11/00, G06F 7/60
Мітки: модулю, пристрій, формування, залишків
Формула / Реферат:
Формула изобретения1. Устройство для формирования остатков по модулю, содержащее 1-1 группу сумматоров (1 = n/q, n - разрядность числа, q - число сумматоров в группе) и блок свертки, выходы которого являются выходами устройства, прямые входы первого слагаемого и входы переноса сумматоров первой группы являются первой, второй и третьей группами информационного входов устройства, прямые входы первого слагаемого сумматоров (і-й группы. (і...
Пристрій для з’єднання процесорів через спільну пам’ять у багатопроцесорній системі
Номер патенту: 1662
Опубліковано: 25.10.1994
Автор: Єрзаков Євген Михайлович
МПК: G05B 21/00, H03K 17/00, G06F 15/16
Мітки: пам'ять, системі, процесорів, спільну, пристрій, з'єднання, багатопроцесорній
Формула / Реферат:
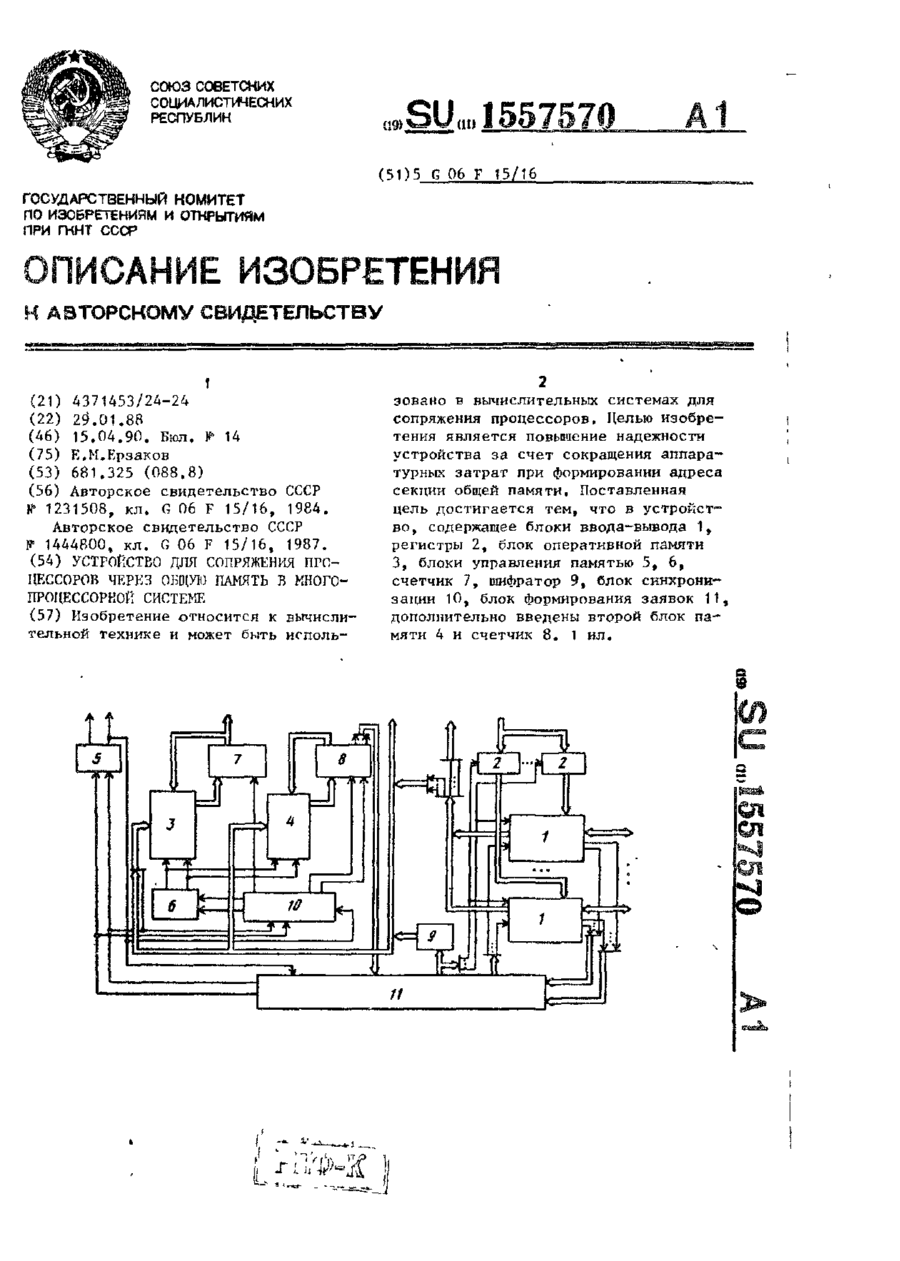
Устройство для сопряжения процессоров через общую память в многопроцессорной системе, содержащее N блоков ввода-вывода, N регистров, блок памяти, первый и второй блоки управления памятью, первый и второй счетчики, шифратор, блок синхронизации и блок формирования заявок, информационные входы-выходы блоков ввода-вывода являются входами-выходами обмена устройства, выходы квитирования записи всех блоков ввода-вывода подключены соответственно к...
Попередній патент: Пороговий пристрій позиційного контролю терморезисторів
Наступний патент: Пристрій для формування бінарних телевізійних сигналів
Випадковий патент: Система автономного опалювання приміщень