Пристрій компенсації транспортного запізнення натягу полотна
Номер патенту: 27428
Опубліковано: 15.09.2000
Автори: Винницький Володимир Миколайович, Бойко Сергій Ростиславович, Лонкевич Євген Сергійович, Піцан Роман Михайлович
Текст
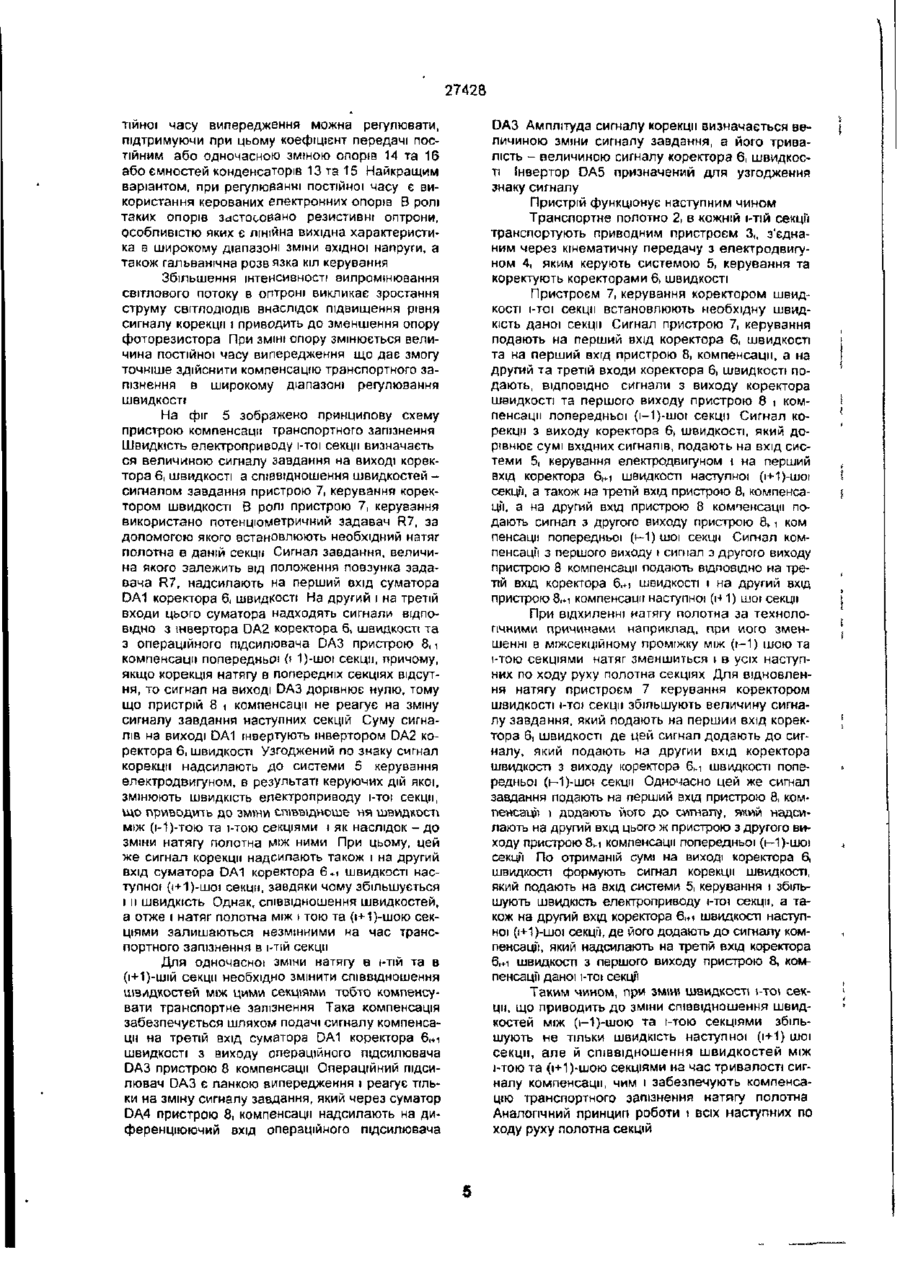
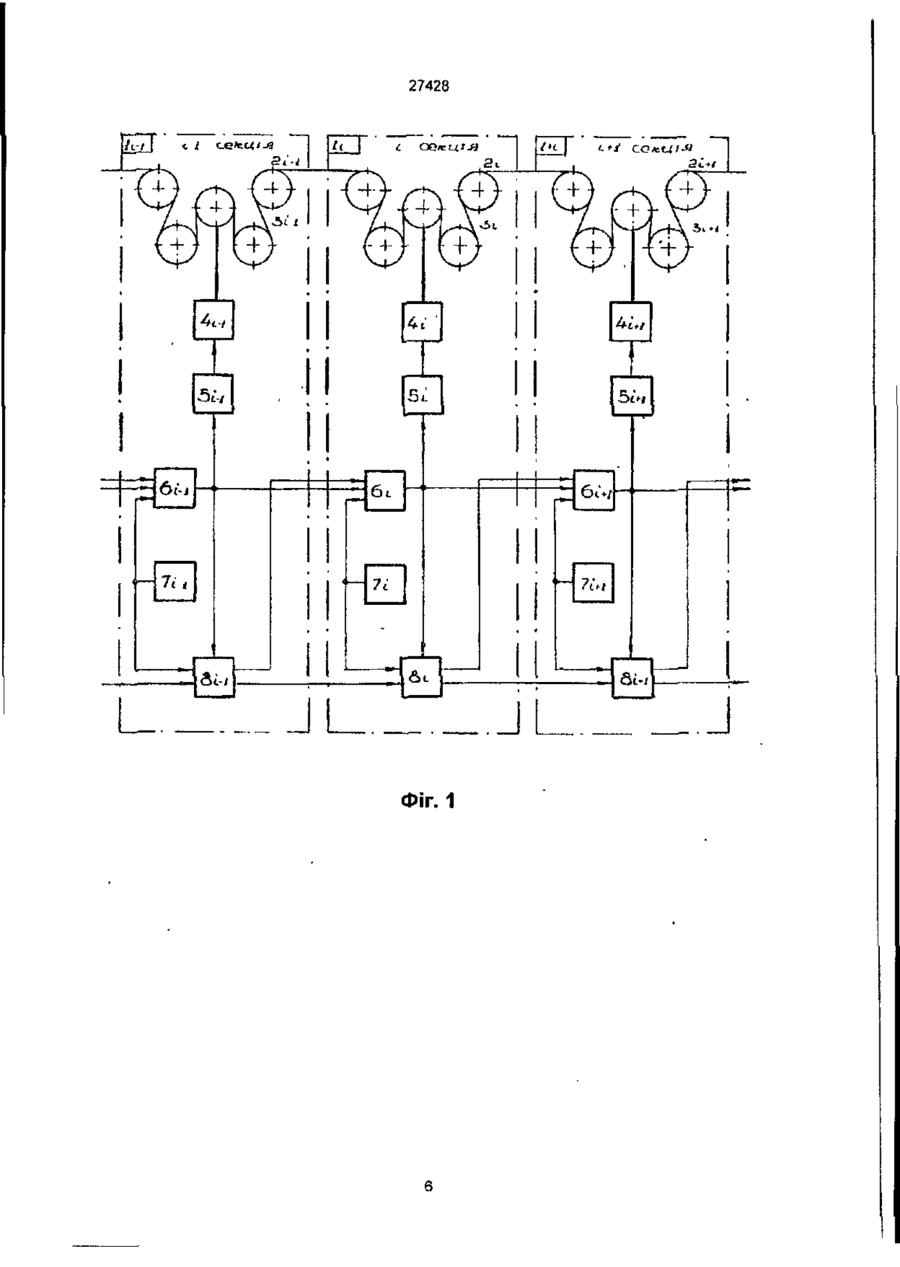
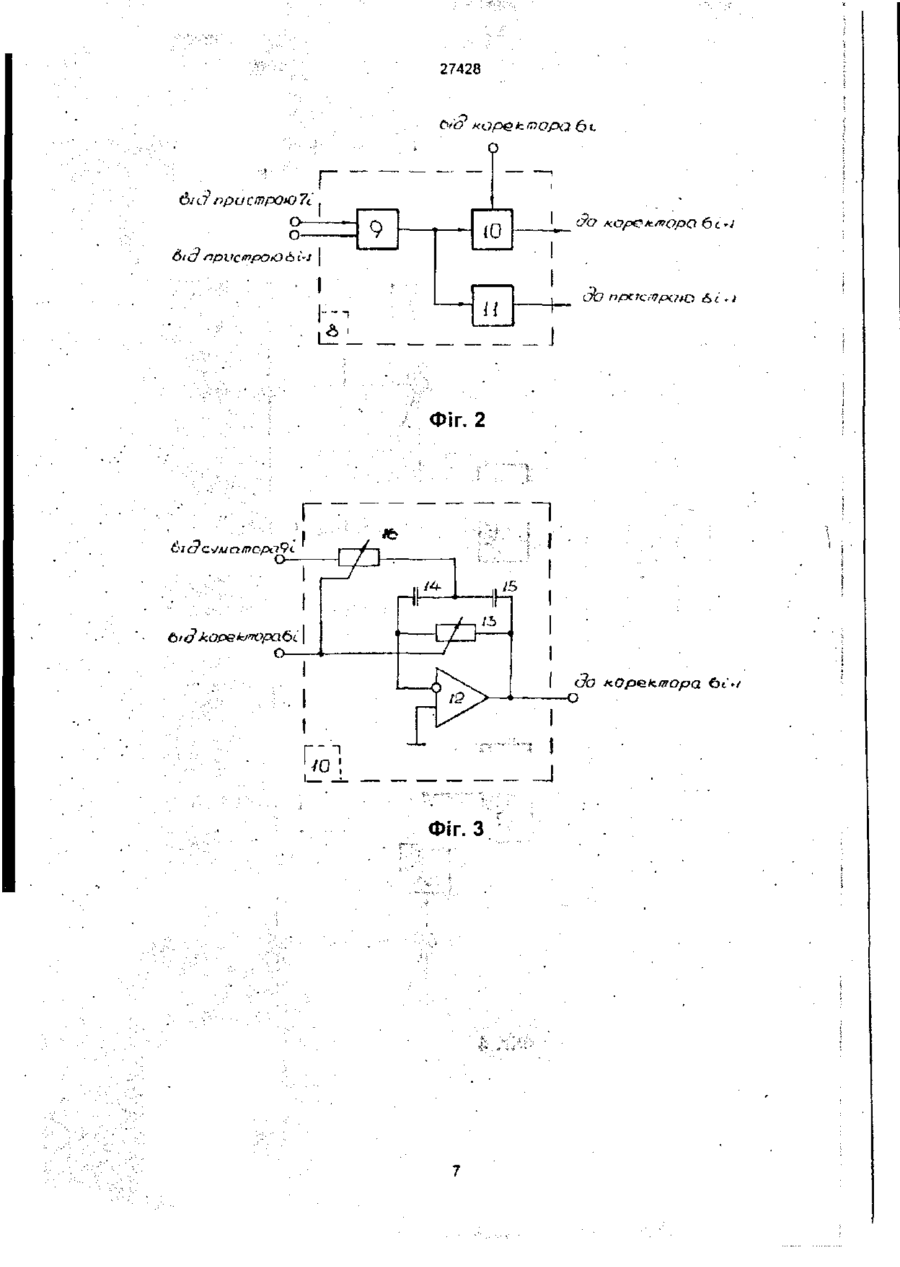
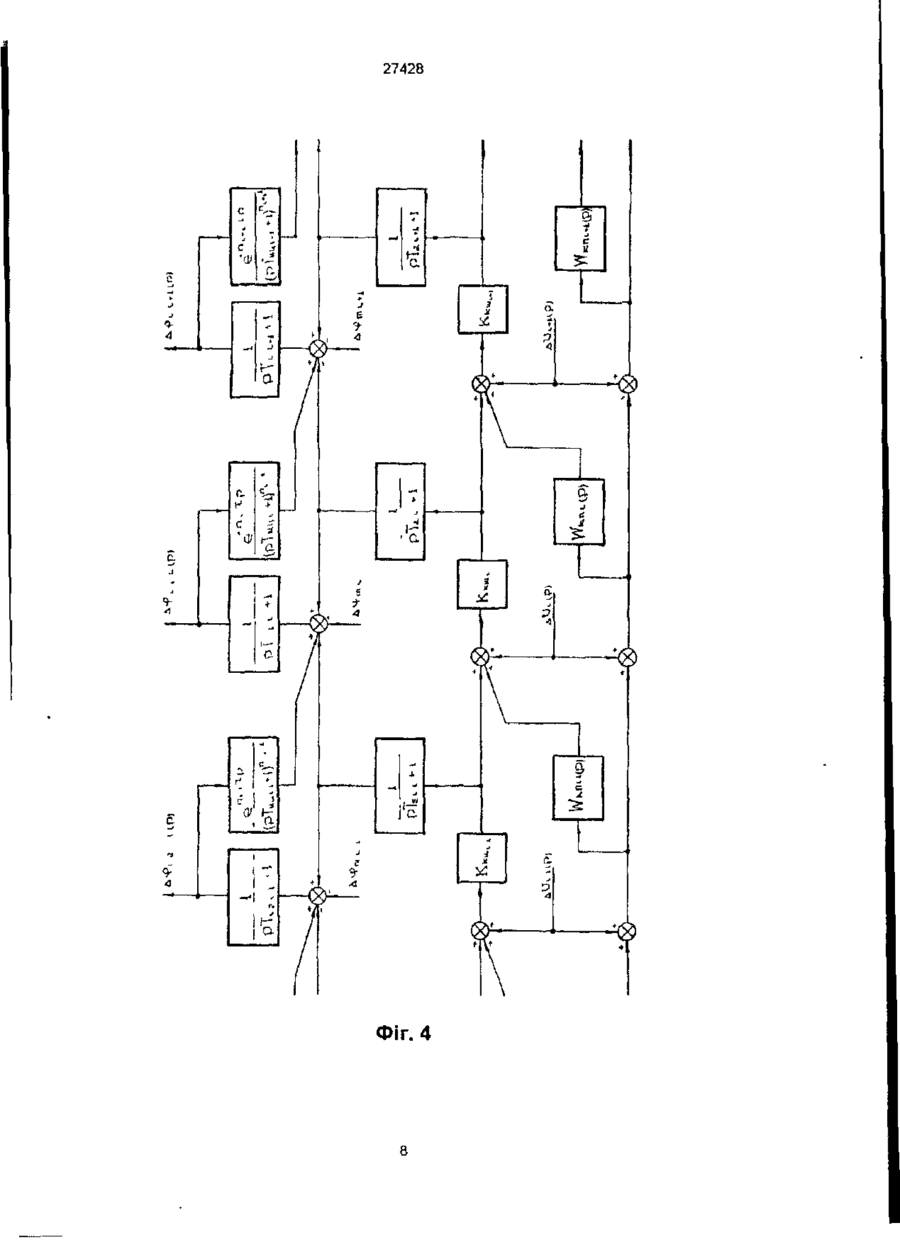
1 Пристрій компенсації транспортного запізнення натягу полотна, який складається з п багатоциліндрових секцій, кожна і-та секція вміщує транспортоване полотно, приводний пристрій, електродвигун, систему керування коректор швидкості, пристрій керування коректором, причому багатоциліндрові секції послідовно з'єднані через транспортоване полотно, а транспортоване полотно, приводний пристрій, електродвигун, система керування, коректор швидкості, пристрій керування коректором з'єднані послідовно, другий вхід коректора швидкості І-ОІ секції з'єднаний з виходом коректора швидкості попередньої (і-і)-ог секції, а вихід - з другим входом коректора швидкості наступної (І+1)-ОІ секції, який відрізняється тим, що він вміщує пристрій компенсації, перший вхід якого з'єднаний з виходом пристрою ке Винахід відноситься до області виробництва довгомірних матеріалів, зокрема до систем автоматичного керування неперервно-поточними ЛІНІЯМИ Винахід може бути використаний в паперо-1 картоноробних машинах, а також прокатних станах агрегатах для неперервного лудіння ЛІНІЯХ по виробництву скла та виробів із полімерних матеріалів Відомий електропривод неперервно-поточної піни, який складається з локальних систем ре рування коректором, перший вихід - з третім входом коректора швидкості наступної (І-И)-ОІ секції, другий вихід - з другим входом пристрою компенсації наступної {і+1)-оі секції, другий вхід - з другим виходом пристрою компенсації попередньої (І-1)-ОІ секції, третій керуючий вхід - з виходом коректора швидкості, а третій вхід коректора швидкості і-оі секції з'єднаний з першим виходом пристрою компенсації попередньої (|-1)-ОІ СЄКЦІІ 2 Пристрій по п 1, який відрізняється тим, що пристрій компенсації складається з суматора, блока випередження та їнвертора, причому суматор та блок випередження з'єднані послідовно, а вихід суматора з'єднаний з входом інвертора, причому перший і другий входи суматора та другий вхід блока випередження є ввдповідно першим другим і третім входами пристрою компенсації, а виходи блока випередження та інвертора є першим і другим виходами пристрою компенсації 3 Пристрій по п 2 який відрізняється тим, що блок випередження вміщує операційний підсилювач, два регульовані резистори, два конденсатори, причому інвертуючий вхід операційного підсилювача з'єднаний з першим конденсатором і першим регульованим резистором а вихід операційного підсилювача - з другим конденсатором і другим виводом першого регульованого резистора, другий регульований резистор з'єднаний з другими обкладками першого і другого конденсаторів, керуючі входи першого і другого регульованих резисторів з'єднан* шж собою і є другим входом блока випередження, другий вихід другого регульованого резистора є першим входом блока випередження, а вихід операційного підсилювача є виходом блока випередження гулювання швидкостей секцій [1] видовження та натяг полотна встановлюються і коректуються оператором неперервно-поточної лінії вручну для кожної наступної секції почергово При технологічних відхиленнях натягу в даному МІЖСЄКЦІЙНОму проміжку оператор змінює швидкість даної секції таким чином, щоб відновити в даному міжсекційному проміжку необхідний натяг При цьому в наступному міжсекційному проміжку часткове CM О 00 CM г CM 27428 відновлення натягу відбувається по закінченні часу, який визначається запізненням в транспортуванні полотна зі скоректованим натягом Недоліком є необхідність додаткового коректування натягу в наступному міжсесійному проміжку на протязі часу який визначається транспортним запізненням натягу полотна Відома система регулювання [2], яка забезпечує ПОСТІЙНІСТЬ співвідношення швидкостей багатоциліндрових секцій і, ВІДПОВІДНО, постійність натягу полотна як в даному, так і в наступних міжсекційних проміжках при коректуючих діях оператора Недоліком такої системи є наявність транспортного запізнення натягу при коректуванні його в багатоциліндрових секиїях Найближчою до згаданого винаходу за технічною суттю є система електроприводу з коректорами швидкості [3) Електропривод неперервно поточної лінн вміщує п послідовно з'єднаних секцій, кожна і-та секція включає транспортоване попотно, приводний пристрій, електродвигун, систему керування електродвигуном, коректор швидкості, вхід якого з'єднаний з виходом коректора швидкості попередньої (І-1)-ОІ секції а вихід з'єднаний з входом коректора швидкості наступної (І+1)-ОІ секції Недоліком електроприводу є недостатня точність коректування натягу в наступному міжсєкційному проміжку на протязі часу, який визначається транспортним запізненням натягу полотна при коректуванні його оператором в даному міжсесійному проміжку Задачею винаходу є підвищення точності регулювання натягу полотна шляхом компенсації транспортного запізнення у відновленні натягу в наступних секціях при регулюванні натягу в даній секції Ця задача вирішується завдяки тому, що пристрій компенсації транспортного запізнення натягу полотна вміщує п ПОСЛІДОВНО з'єднаних секцій, кожна і-та секція включає транспортоване полотно, приводний пристрій, електродвигун, систему керування електродвигуном, коректор швидшстгг пристрій керування коректором, а другий вхід коректора швидкості з єднаний з виходом коректора швидкості попередньої (І-1)-ОІ секції, а вихід - з другим входом коректора швидкості наступної 0+1)-оі секції, додатково вміщує пристрій компенсації, перший вхід якого з'єднаний з виходом, пристрою керування коректором, перший вихід - з третім входом коректора швидкості наступної (і+1) оі секції, другий вихід - з другим входом пристрою компенсації наступної (і+1)-оі секції, другий вхід - з другим виходом пристрою компенсації попередньої (І-1)-ОІ секції, третій керуючий вхід - з виходом коректора швидкості, а третій вхід коректора швидкості з'єднаний з першим виходом пристрою компенсації попередньої (і-1)-оі секції Винахід пояснюється кресленням На фіг 1 приведена функціональна схема пристрою, на фіг 2 - функціональна схема пристрою компенсації, на фіг 3 - принципова схема блока випередження, на фіг 4 - структурна схема системи компенсації транспортного запізнення, на фіг 5 принципова схема компенсуючого пристрою Пристрій компенсації транспортного запізнення натягу полотна вміщує п послідовно з'єднаних багатоциліндрових секцій 1,, кожна і-та секція включає транспортоване полотно 2,, приводний пристрій 3, електродвигун 4,. систему 5, керування електродвигуном, коректор 6, швидкості, пристрій 7, керування коректором Другий вхід коректора 6, швидкості І-ОІ секції з'єднаний з виходом коректора 6ь-і швидкості попередньої (І-1)-ОІ секції, вихід - з другим входом коректора 6,*і швидкості наступної (і+1) оі секції Додатково пристрій вміщує пристрій 8, компенсації, перший вхід якого з'єднаний з виходом пристрою 7, керування коректором, перший вихід - з третім входом коректора 6,и швидкості наступної (І+1)-ОІ секції, другий вихід - з другим входом пристрою 8,.і компенсації наступної (І+1)-ОІ секції другий вхід - з другим виходом пристрою 8, і компенсації попередньої (І-1)-ОІ секції, третій керуючий вхід з виходом коректора 6, швидкості, а третій вхід коректора 6, швидкості з'єднаний з першим виходом пристрою 8.-і компенсації попередньої (і-1)ot секції Пристрій 8 компенсації складається з послідовно з'єднаних суматора 9, блока 10 випередження, вихід суматора 9 з'єднаний з входом інвертора 11, причому перший та другий входи суматора 9 і другий вхід блока 10 випередження є ВІДПОВІДНО першим, другим та третім входами пристрою 8 компенсації, а виходи блока 10 випередження та інвертора 11 є першим та другим виходами пристрою 8 компенсації Блок 10 випередження містить операційний підсилювач 12, вхід якого з'єднаний з регульованим резистором 13 і конденсатором 14, а вихід з конденсатором 15 і другим виводом регульованого резистора 13, і регульований резистор 16, який з'єднаний з другими обкладками конденсаторів 14 і 15, причому керуючі входи регульованих резисторів 13 і 16 з'єднані між собою і є другим входом блока 10 випередження, а другий вивід регульованого резистора 16 є першим входом блока 10 випередження, вихід операційного підсилювача 12 є виходом блока 10 випередження Наявність у складі пристрою системи послідовного керування співвідношенням швидкостей дає змогу при керуючих впливах оператора на швидкість в будь-якій секції підтримувати встановлене співвідношення швидкостей, а ВІДПОВІДНО І натяг полотна всіх наступних секцій Ця система є сукупністю послідовно ввімкнених коректорів швидкості, КІЛЬКІСТЬ яких відповідає числу секцій Кожний коректор швидкості формує сигнал корекції для системи керування електродвигуном власної секції Одночасно цей же сигнал надсилається до коректора швидкості наступної секції Встановлення необхідного співвідношення швидкостей за безпечують пристрої керування коректорами Натяг полотна в даній секції визначається натягом полотна попередньої Тому, якщо внаслідок технологічного відхилення в і тій секци натяг, наприклад, послабне, то він обов'язково послабне і в усіх наступних секціях Відновлення натягу полотна починається з секци, де відбулося технологічне відхилення Оператор за допомогою пристрою керування коректором наступної 0+1)шоі секції збільшує п швидкість а ВІДПОВІДНО І на 27428 тяг полотна за рахунок дії системи послідовного керування співвідношенням швидкостей одночасно зростають Ш8ИДКОСТІ в усіх наступних секціях, але співвідношення швидкостей і натяг полотна цих секцій залишаються незмінними Тобто, при відновленні натягу полотна в І-ТІЙ секції, внаслідок зміни співвідношення швидкостей між і-тою та (і+1) шою секціями, в наступній (і+1) шій секції послаблений натяг залишається практично без зміни Відновлення натягу в цій секції відбуватиметься лише при завершенні відновлення натягу полотна в попередній і тій секції Далі натяг почне відновлюватись в (І+2)-ТІЙ секції, пізніше в (і+3)-тій і т д Повне відновлення натягу полотна відбувається з деяким транспортним запізненням Це транспортне запізнення визначається інерційністю міжсекційних та міжциліндрових проміжків, а також зон зчеплення полотна з циліндрами Особливо таке запізнення відчутне в багатоциліндрових секціях і становить для кожної секції при максимальній робочій швидкості машини десятки секунд, а при мінімальній - досягає сотень секунд Запізнення у відновленні натягу полотна погіршує якість готової продукції яка випускається на протязі часу цього запізнення а також створює передумову помилки оператора, а саме хибну необхідність додаткової корекції натягу в наступних секціях, в які ще не надійшло полотно з зкоректованим натягом Допущення такої помилки приводить до необхідності повторного коректування натягу окремо в кожній секції, а в гіршому випадку - до обриву полотна Створення системи компенсації транспортного запізнення усуває наведені вище недоліки Така система передбачає застосування в кожній секції компенсуючого пристрою, який формує додатковий сигнал корекції Під дією цього сигналу змінюється співвідношення швидкостей наступних секцій на час, який визначається транспортним запізненням В результаті відновлення натягу полотна у всіх секціях відбувається одночасно Розглянемо процеси деформації транспортного полотна в багатоциліндрових секціях Для полегшення викладки вважатимемо полотно однорідним, невагомим абсолюти" пружним, а також знехтуємо впливом натягу полотна на привод секції Математично фізичне явище транспортного запізнення у відновленні натягу полотна в наступному міжсекційному проміжку можна описати рівнянням Фікції = ф(і,) де т - час запізнення Основна роль в утворенні транспортного запізнення т = в„Л/ належить кінцевій швидкості переносу кожного елементарного об'єму полотна, де ви - зона контакту полотна з циліндром секції, V лінійна швидкість полотна Передавальна функція транспортного запізнення натягу полотна має вигляд WT3(P, Є"* Вираз у відносних одиницях, який пов'язує приріст натягу полотна в даному міжсекційному проміжку з різницею швидкостей суміжних секцій, а також натягом, який надходить з попереднього міжсекційного проміжку, має вигляд ФІ-І.(Р) (1) де ф.г+і(Р), Ф, і крі - натяг в даному міжсекційному проміжку t транспортований з попереднього міжсекційного проміжку, Vi+i - лінійна швидкість секцій, які обмежують даний міжсекційний проміжок, тІГ - постійна часу чистого запізнення, яка визначається зоною контакту полотна з валами без ковзання, ТР ,л ТНЦі - ПОСТІЙНІ часу міжсекційного і міжциліндрового проміжків, п, - кількість валів секції На основі виразу (1) побудуємо структурну схему (фіг 4), добудовуючи структурні моделі замкнутих контурів регулювання швидкостей секцій з передавальною функцією W i и» (р) ~ 1 (2) Можливі два варіанти організації каналів компенсації транспортного запізнення при отриманні сигналу компенсації від давача швидкості (тахогенератора), або від пристрою завдання швидкості секцм (коректор швидкості) Перший варіант забезпечує компенсацію транспортного запізнення натягу полотна при змінах швидкості секції як від зміни завдання, так і від збурень моменту статичного опору Другий варіант дає змогу компенсувати транспортне запізнення, яке викликане тільки зміною завдання на швидкість секції Обгрунтування вибору другого варіанту побудови системи компенсації транспортного запізнення полягає в наступному застосовані на машинах астатичні CAP швидкості забезпечують нульовий етатизм по навантаженню та високу швидкодію системи, внаслідок чого зміна швидкості від зміни моменту навантаження не викликає в наступних міжсекційних проміжках значних відхилень натягу, які потребують компенсації транспортного запізнення Крім цього, в другому варіанті відпадають технічні труднощі диференціювання сигналу тахогенератора Синтез компенсуючого пристрою здійснюється на основі теорії інваріантності багатозв'язкових систем і(р) = Д (3) Розділивши обидві частини виразу (3) на Avijp), отримаєм аналогічний вираз для передавальних функцій, які описують канали проходження сигналу корекції (фіг 4) від зміни завдання на швидкість і-тоі секції Д\,[Р) до приросту натягу полотна Дф, і і(р) та Дф, ,+і(Р), ВІДПОВІДНО в і-тому та в (і+1)-шому міжсекційних проміжках WI{P) = Розкривши зміст передавальних W1(P) та W,+i(P) отримаєм (4) функцій 27428 L_-rK _J —L . ' ^Тр P |t " ' ,)n2ТМЦі та п, > 8 можна знехтувати запізнення аперіодичної ланки (Уп7т иіЧ ір*і)~ 1 порівняно з ланкою чистого запізнення е р П | Г ' ^ П і НЦІ ) Тоді рівність (5) значно сп роститься і прийме вигляд 1 T L«-1 T . t-*i 'мИр+1 (6) ц, v s 1,2 п - порядок розкладу в дробовий ряд Пада Чим вищий порядок розкладу, тим точніше здійснюється апроксимація ланки запізнення, але одночасно значно ускладнюється технічна реалізація цієї ланки Дослідження ланок випередження проводилось для перших чотирьох порядків розкладу в ряд Пада а дослідження їх перехідних характеристик здійснювалось на ЕОМ Порівняльний аналіз перехідних характеристик дозволяє зробити висновок про невисоку завадостійкість моделей 11 ПІ порядків які містять в перехідній характеристиці крутий "диференцюючий" передній фронт Оптимальною можна вважати модель II порядку, яка реалізується за допомогою двох операційних підсилювачів Модель IV порядку потребує ВІСІМ операційних підсилювачів що робить пристрій випередження дуже громіздким і складним при налагодженні Для розкладу в ряд Пада II порядку передавальна функція ланки запізнення має вигляд Розв'язавши це рівняння стосовно W«n G11V (т р ) Передавальна функція ланки випередження записується наступним чином W m (р) = 1 - є" 12т, а її реалізація подана на фіг З Величина постійної часу компенсації визначається параметрами пристрою т = R1C1 = I2R2C2, ІНШІ параметри зв'язані співвідношеннями Сі=5С 2 Реалізація пристрою компенсації здійснюється на елементній базі УБСР-АИ, яка використовується при побудові CAP швидкості і системи послідовного керування співвідношенням швидкостей Зміна рівня швидкості машини приводить до зміни постійної часу транспортного запізнення натягу полотна Налагодження системи компенсації транспортного запізнення на компенсацію мінімального значення, яке відповідає максимальній швидкості машини приводить до недовикористання системи на низьких швидкостях, а при діапазоні регулювання D>2 практично перестає бути ефективною Ця обставина потребує зміни постійних часу випередження в компенсуючих пристроях обернено пропорційно до зміни швидкості машини Із аналізу співвідношень параметрів схеми ланки випередження випливає що величину пос 27428 тійної часу випередження можна регулювати, підтримуючи при цьому коефіцієнт передачі постійним або одночасною зміною опорів 14 та 16 або ємностей конденсаторів 13 та 15 Найкращим варіантом, при регулюванні постійної часу є використання керованих електронних опорів В ролі таких опорів Зсістооовзно резистивні оптрони, особливістю яких є лінійна вихідна характеристика в широкому діапазоні зміни вхідної напруги, а також гальванічна розв язка кіл керування Збільшення інтенсивності випромінювання світлового потоку в оптроні викликає зростання струму СВІТЛОДЮДІВ внаслідок підвищення рівня сигналу корекції і приводить до зменшення опору фоторезистора При ЗМІНІ опору змінюється величина постійної часу випередження що дає змогу точніше здійснити компенсацію транспортного запізнення в широкому діапазоні регулювання швидкості На фіг 5 зображено принципову схему пристрою компенсації транспортного запізнення Швидкість електроприводу і-тої секції визначаєть ся величиною сигналу завдання на виході коректора 6, швидкості а співвідношення швидкостей сигналом завдання пристрою 7, керування коректором швидкості В ролі пристрою 7, керування використано потенціометричний задавач R7, за допомогою якого встановлюють необхідний натяг полотна в даній секції Сигнал завдання, величина якого залежить від положення повзунка задавача R7, надсилають на перший вхід суматора DA1 коректора 6( швидкості На другий і на третій входи цього суматора надходять сигнали ВІДПОВІДНО з інвертора DA2 коректора 6, швидкості та з операційного підсилювача DA3 пристрою 8, і компенсації попередньої 0 1)-шоі секції, причому, якщо корекція натягу в попередніх секціях відсутня, то сигнал на виході DA3 дорівнює нулю, тому що пристрій 8 і компенсації не реагує на зміну сигналу завдання наступних секцій Суму сигналів на виході DA1 інвертують інвертором DA2 коректора 6, швидкості Узгоджений по знаку сигнал корекції надсилають до системи 5 керування електродвигуном, в результаті керуючих дій якої, змінюють швидкість електроприводу і-тої секції, ЩО ПРИВОДИТЬ ДО ЗМІНИ СПІВВІДНОШЄ НЯ ШВИДКОСТІ між (і-1)-тою та і-тою секціями і як наслідок - д о зміни натягу полотна між ними При цьому, цей же сигнал корекції надсилають також і на другий вхід суматора DA1 коректора 6 + і швидкості наступної (і-Н)-шоі секцн, завдяки чому збільшується і п швидкість Однак, співвідношення швидкостей, а отже і натяг полотна між і тою та {і+1)-шою секціями запишаються незмінними на час транспортного запізнення в І-ТІЙ секції Для одночасної зміни натягу в і-тій та в (і+1)-ішй секції необхідно змінити співвідношення швидкостей між цими секціями тобто компенсувати транспортне запізнення Така компенсація забезпечується шляхом подачі сигналу компенсації на третій вхід суматора DA1 коректора 6,+і швидкості з виходу операційного підсилювача DA3 пристрою 8 компенсації Операційний підсилювач DA3 є ланкою випередження і реагує тільки на зміну сигналу завдання, який через суматор DA4 пристрою 8, компенсації надсилають на диференціюючий вхід операційного підсилювача DA3 Амплітуда сигналу корекції визначається величиною зміни сигналу завдання, а його тривалість - величиною сигналу коректора 6, швидкості Інвертор DA5 призначений для узгодження знаку сигналу Пристрій функціонує наступним чином Транспортне полотно 2, в кожній І-ТІЙ секцн транспортують приводним пристроєм 3,, з'єднаним через кінематичну передачу з електродвигуном 4, яким керують системою 5, керування та коректують коректорами 6, швидкості Пристроєм 7, керування коректором швидкості і-тої секції встановлюють необхідну швидкість даної секції Сигнал пристрою 7, керування подають на перший вхід коректора 6( швидкості та на перший вхід пристрою 8, компенсації, а на другий та третій входи коректора 6, швидкості подають, ВІДПОВІДНО сигнали з виходу коректора швидкості та першого виходу пристрою 8 і компенсації попередньої (І-1)-ШОІ секції Сигнал корекції з виходу коректора 6, швидкості, який дорівнює сумі вхідних сигналів, подають на вхід системи 5, керування електродвигуном і на перший вхід коректора 6,+і швидкості наступної (І+1)-ШОІ секцн, а також на третій вхід пристрою 8, компенсації, а на другий вхід пристрою 8 компенсації подають сигнал з другого виходу пристрою 8, і ком пенсаци попередньої (і—1)шоі секцн Сигнал компенсації з першого виходу і сигнал з другого виходу пристрою 8 компенсації подають ВІДПОВІДНО на третій вхід коректора 6,.і швидкості і на другий вхід пристрою 8і+і компенсації наступної (н 1) шоі секції При відхиленні натягу полотна за технологічними причинами наприклад, при його зменшенні в міжсесійному проміжку між (і-1) шою та і-тою секціями натяг зменшиться і в усіх наступних по ходу руху полотна секціях Для відновлення натягу пристроєм 7 керування коректором швидкості 1-тоі секції збільшують величину сигналу завдання, який подають на перший вхід коректора 6, швидкості де цей сигнал додають до сигналу, який подають на другий вхід коректора швидкості з виходу коректора би швидкості попередньої (ь-1)-шоі секції Одночасно цей же сигнал завдання подають на перший вхід пристрою 8, компенсації і додають його до сигналу, який надсилають на другий вхід цього ж пристрою з другого виходу пристрою 8и компенсації попередньої (і-1)-шо! секції По отриманій сумі на виході коректора 6, швидкості формують сигнал корекції швидкості, який подають на вхід системи 5, керування і збільшують швидкість електроприводу і-тої секції, а також на другий вхід коректора 6t«i швидкості наступної (і+1)-шоі секцн, де його додають до сигналу компенсації, який надсилають на третій вхід коректора 6,-и швидкості з першого виходу пристрою 8, компенсації даної і-тої секції Таким чином, при ЗМІНІ ШВИДКОСТІ І-ТОІ сек ції, що приводить до зміни співвідношення швидкостей між (і-1)-шою та і-тою секціями збільшують не тільки швидкість наступної 0+1} шоі секції, але й співвідношення швидкостей між і-тою та (і+1)-шою секціями на час тривалості сигналу компенсації, чим і забезпечують компенсацію транспортного запізнення натягу полотнаАналогічний принцип роботи t всіх наступних по ходу руху полотна секцій 27428 J_i I С СОл: Ц і -« JL ФІГ 1 J 27428 6*. Г б/ с? пр и с трою 7с О О (О Фіг. 2 Фіг. З 6 С' 27428 •— С С % С 'ф Ь с г J J А 0 с' н с її/ я с —ч 9 + , а < ^ а Фіг. 4 27428 і I -І о до do Фіг. 5 Тираж 50 екз Відкрите акціонерне товариство «Патент» Україна, 88000. м Ужгород, вул Гагаріна. 101 (03122)3-72-89 (03122)2-57-03
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for compensation for transport delay of tension of fabric
Автори англійськоюBoiko Serhii Rostyslavovych, Vynnytskyi Volodymyr Mykolaiovych, Lonkevych Yevhen Serhiiovych, Pitsan Roman Mykhailovych
Назва патенту російськоюУстройство компенсации транспортной задержки натяга полотна
Автори російськоюБойко Сергей Ростиславович, Винницкий Владимир Николаевич, Лонкевич Евгений Сергеевич, Пицан Роман Михайлович
МПК / Мітки
МПК: G01L 5/04, B65H 77/00
Мітки: транспортного, пристрій, запізнення, компенсації, полотна, натягу
Код посилання
<a href="https://ua.patents.su/10-27428-pristrijj-kompensaci-transportnogo-zapiznennya-natyagu-polotna.html" target="_blank" rel="follow" title="База патентів України">Пристрій компенсації транспортного запізнення натягу полотна</a>
Пристрій для накатки полотна в рулон
Номер патенту: 5319
Опубліковано: 28.12.1994
Автори: Казаков Володимир Дмитрович, Цирень Віталій Семенович
МПК: B65H 18/00
Мітки: накатки, рулон, пристрій, полотна
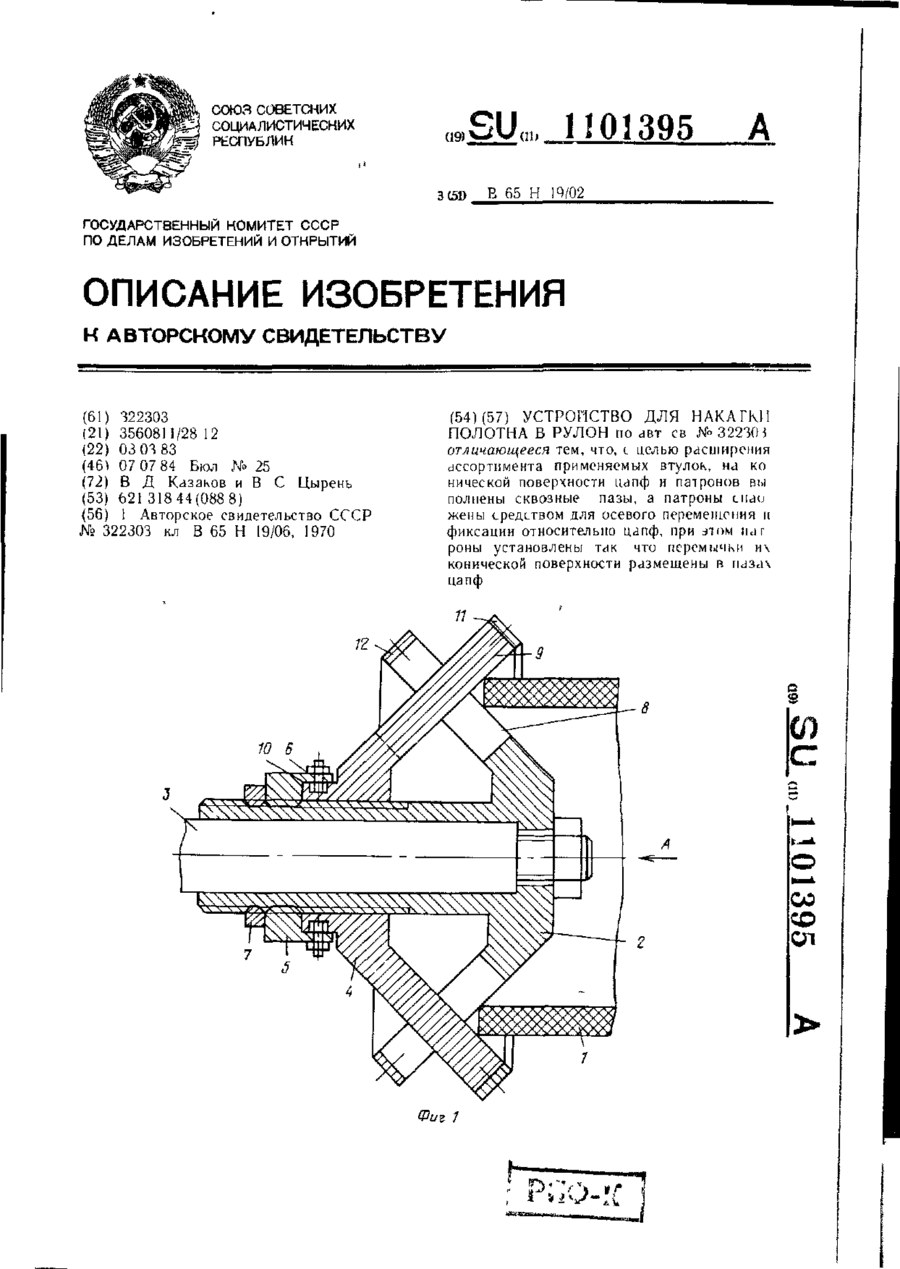
Формула / Реферат:
Устройство для накатки полотна в рулон по авт. св.№ 322303, отличающееся тем, что, с целью расширения ассортимента применяемых втулок, на конической поверхности цапф и патронов выполнены сквозные пазы, а патроны снабжены средством для осевого перемещения и фиксации относительно цапф, при этом патроны установлены так, что перемычки их конической поверхности размещены в пазах цапф.
Протиугінний пристрій для транспортного засобу
Номер патенту: 20937
Опубліковано: 07.10.1997
Автор: Меснянкін Борис Миколайович
МПК: B60R 25/06
Мітки: засобу, транспортного, протиугінний, пристрій
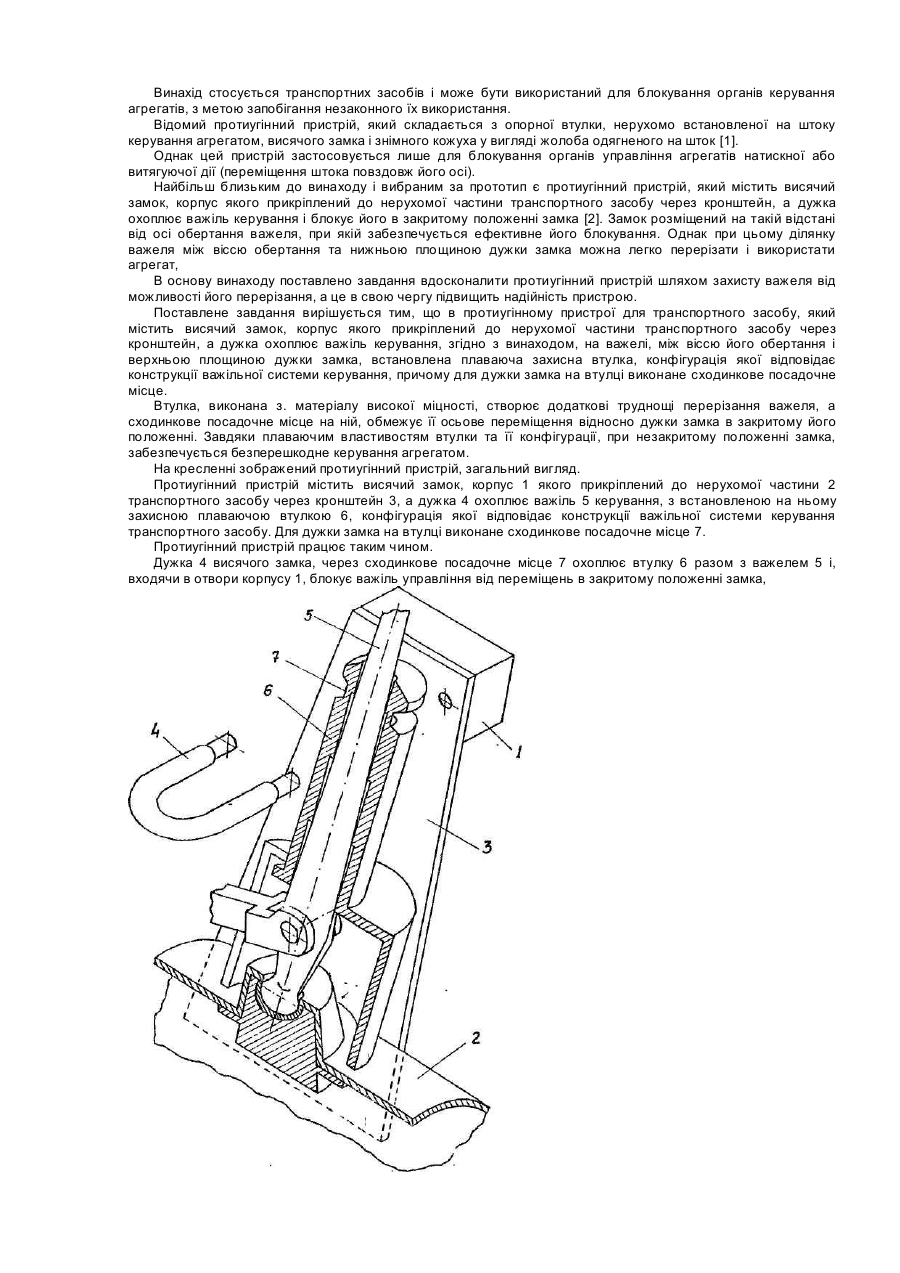
Формула / Реферат:
Протиугінний пристрій для транспортного засобу, який містить висячий замок, корпус якого прикріплений до нерухомої частини транспортного засобу через кронштейн, а дужка охоплює важіль управління, який відрізняється тим, що на важелі, між віссю його обертання і верхньою площиною дужки замка, встановлена плаваюча захисна втулка, конфігурація якої відповідає конструкції важільної системи керування, причому для дужки замка на втулці виконане...
Пристрій для миття полотна бонового загородження
Номер патенту: 11257
Опубліковано: 25.12.1996
Автори: Чариков Невіль Федорович, Подоплелов Микола Олегович
МПК: B08B 3/02
Мітки: бонового, миття, пристрій, полотна, загородження
Формула / Реферат:
(57) Устройство для мойки полотна бонових заграждений, содержащее прижимной механизм для полотна, направляющий ролик для полотна и коллектор с соплом, расположенный под направляющим роликом, отличающееся тем, что устройство снабжено дополнительным коллектором с соплами, расположенными над направляющим роликом, кронштейнами, каждый из которых связан с одним из коллекторов, тягой, шарнирно связанной с одним из кронштейнов, водилом, шарнирно...
Пристрій для просочування рухомого полотна
Номер патенту: 5256
Опубліковано: 28.12.1994
Автори: Пєгловський Віталій Людомирович, Новік Валерій Олександрович, Івіна Алла Василівна, Пастернак Ігор Самуйлович
МПК: B05C 3/02
Мітки: рухомого, пристрій, полотна, просочування
Формула / Реферат:
Устройство для пропитки движущегося полотна, содержащее ванну с пропитывающей жидкостью, опорный вал, наносящий вал с эластичным покрытием, на поверхности которого выполнены ячейки, отличающееся тем, что, с целью повышения качества пропитки за счет увеличения равномерности и степени насыщения полотна жидкостью, ячейки выполнены в виде прямоугольников, примыкающих друг к другу на всей поверхности наносящего вала и вытянутых вдоль его оси,...
Пристрій вимірювання незворотних деформацій матеріалу
Номер патенту: 10781
Опубліковано: 25.12.1996
Автори: Бойко Сергій Ростиславович, Піцан Роман Михайлович, Лонкевич Євген Сергійович, Винницький Володимир Миколайович
МПК: G01N 27/00, G01B 7/00
Мітки: вимірювання, матеріалу, пристрій, незворотних, деформацій
Формула / Реферат:
Пристрій вимірювання незворотних деформацій матеріалу, що складається з ряду послідовно розташованих секцій, кожна з яких вміщує приводний пристрій з електродвигуном, систему керування, вимірювач швидкості і вимірювач натягу матеріалу, які з'єднані з входами системи керування, сигналізатор лінійної швидкості, до входу якого підімкнений вимірювач швидкості, блок вимірювання модуля пружності, перший вхід якого підімкнений до...
Попередній патент: Спосіб прополки просапних культур і пристрій для його здійснення
Наступний патент: Перетворювач неелектричної величини в електричний сигнал
Випадковий патент: Спосіб відновлення задньої хрестоподібної зв'язки колінного суглоба