Механізм щелкунова для перетворення обертального руху в коливальний
Номер патенту: 29369
Опубліковано: 16.10.2000
Автори: Вороной Віталій Степанович, Щелкунов Єгор Єлисейович, Прищепа Микола Петрович

Формула / Реферат
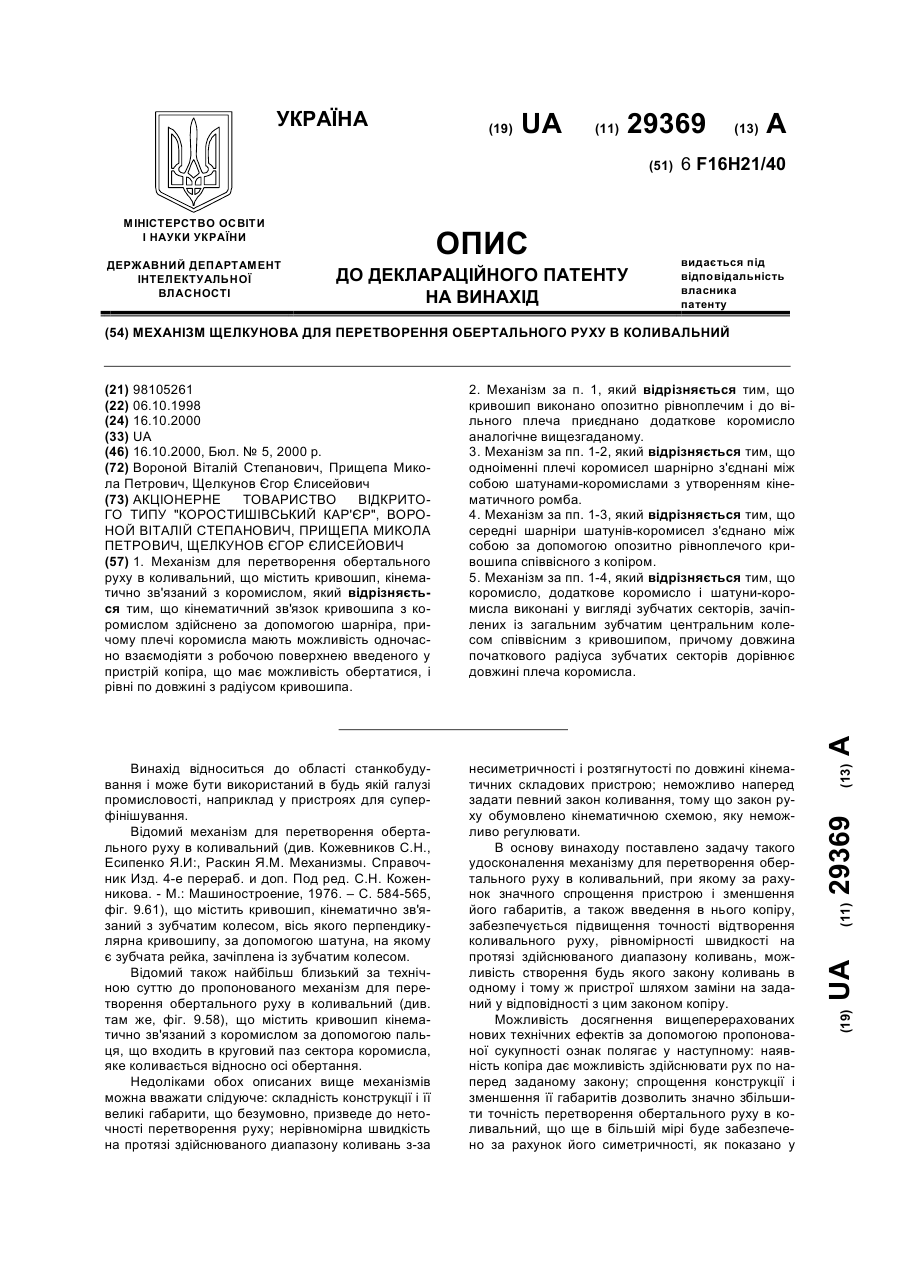
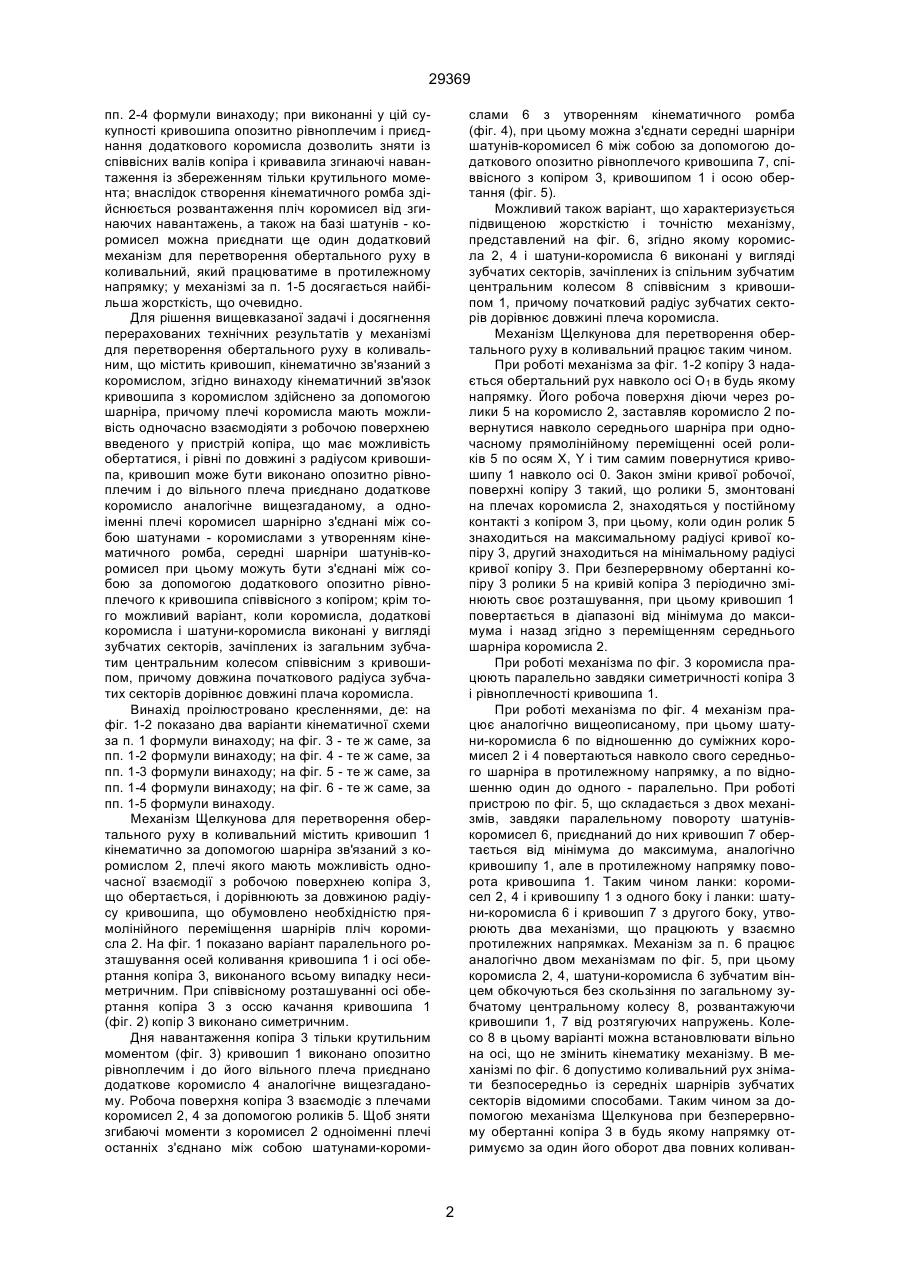
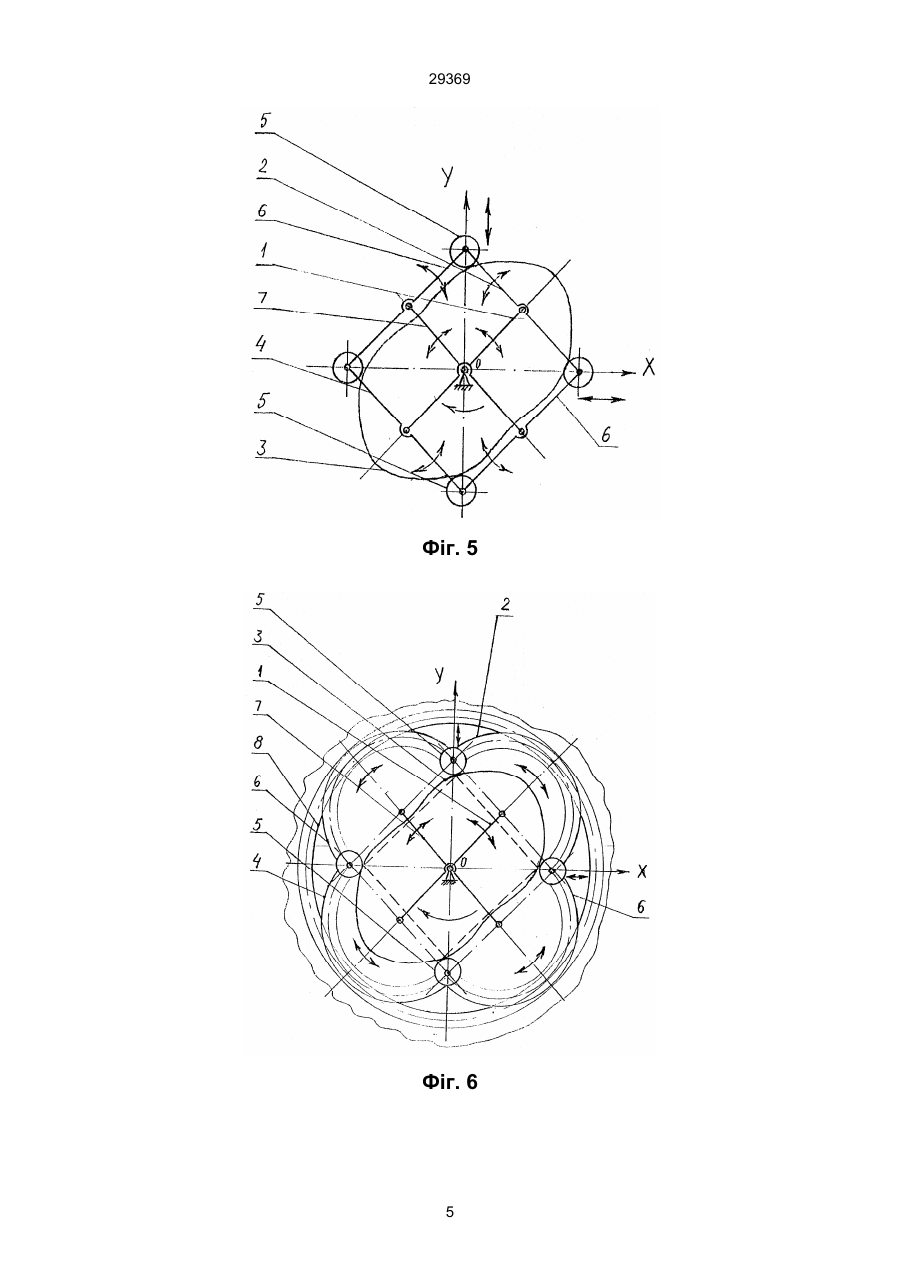
1. Механізм для перетворення обертального руху в коливальний, що містить кривошип, кінематично зв’язаний з коромислом, який відрізняється тим, що кінематичний зв’язок кривошипа з коромислом здійснено за допомогою шарніра, причому плечі коромисла мають можливість одночасно взаємодіяти з робочою поверхнею введеного у пристрій копіра, що має можливість обертатися, і рівні по довжині з радіусом кривошипа.
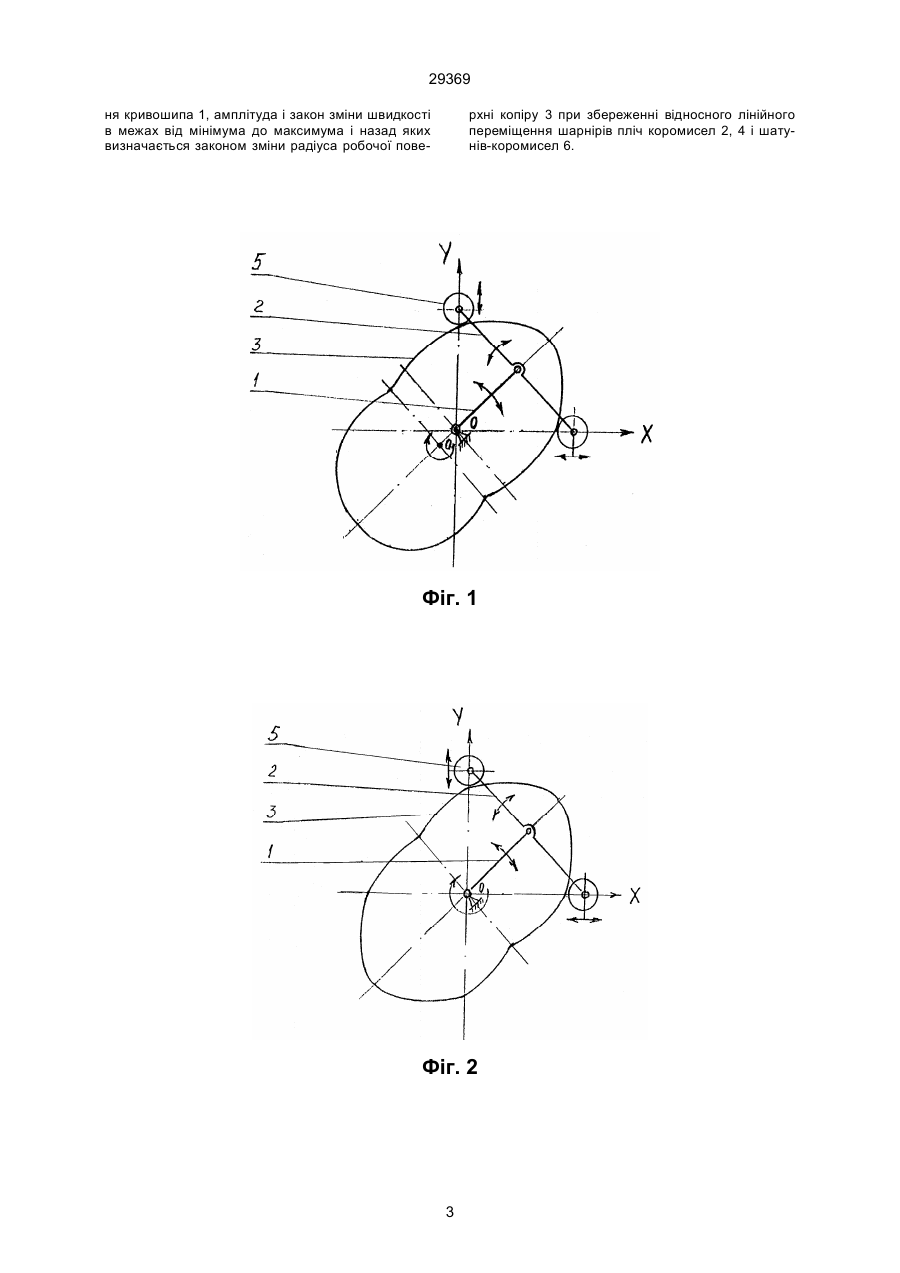
2. Механізм за п. 1, який відрізняється тим, що кривошип виконано опозитно рівноплечим і до вільного плеча приєднано додаткове коромисло аналогічне вищезгаданому.
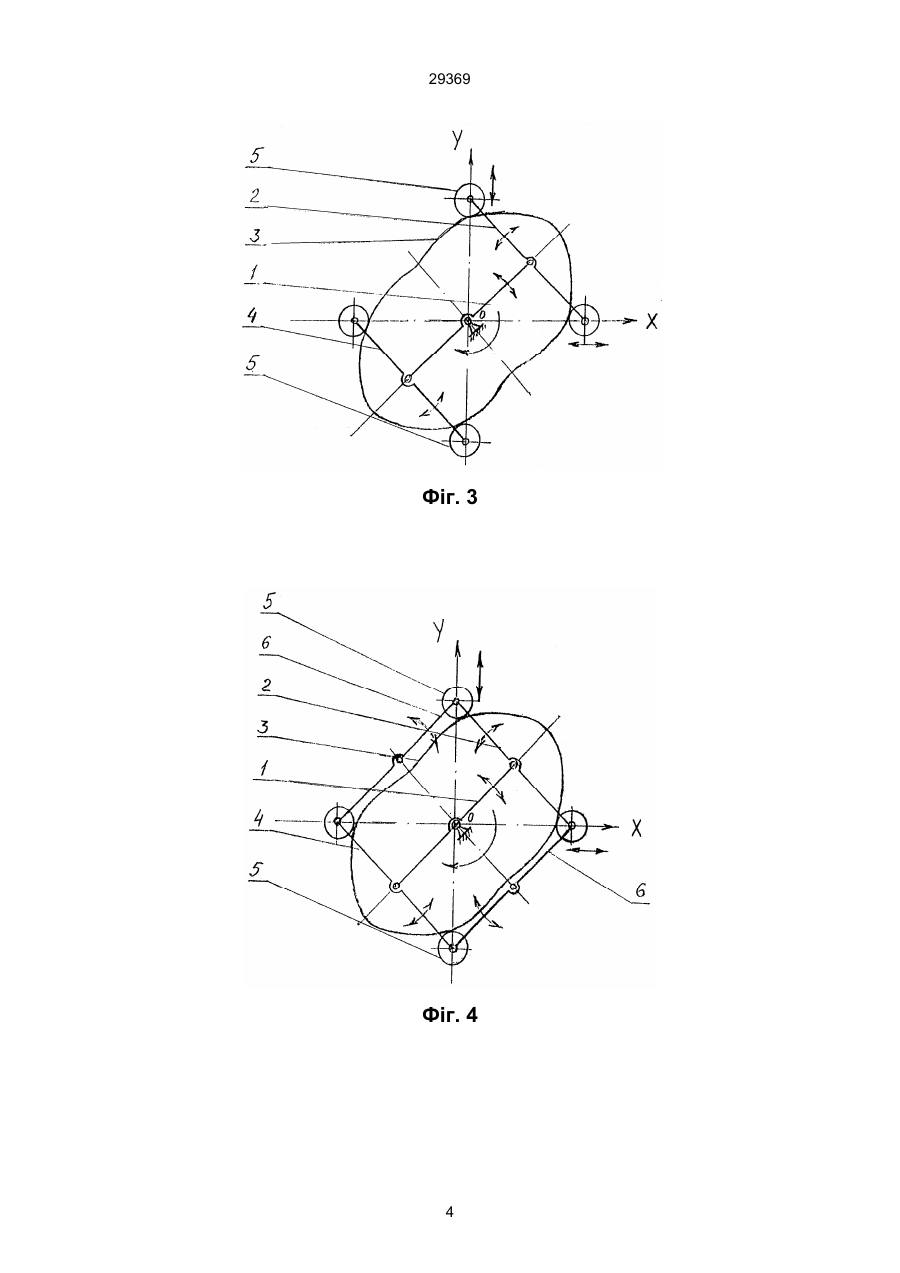
3. Механізм за пп. 1-2, який відрізняється тим, що однойменні плечі коромисел шарнірно з’єднані між собою шатунами-коромислами з утворенням кінематичного ромба.
4. Механізм за пп. 1-3, який відрізняється тим, що середні шарніри шатунів-коромисел з’єднано між собою за допомогою опозитно рівноплечого кривошипа співвісного з копіром.
5. Механізм за пп. 1-4, який відрізняється тим, що коромисло, додаткове коромисло і шатуни-коромисла виконані у вигляді зубчатих секторів, зачіплених із загальним зубчатим центральним колесом співвісним з кривошипом, причому довжина початкового радіуса зубчатих секторів дорівнює довжині плеча коромисла.
Текст
1. Механізм для перетворення обертального руху в коливальний, що містить кривошип, кінематично зв'язаний з коромислом, який відрізняється тим, що кінематичний зв'язок кривошипа з коромислом здійснено за допомогою шарніра, причому плечі коромисла мають можливість одночасно взаємодіяти з робочою поверхнею введеного у пристрій копіра, що має можливість обертатися, і рівні по довжині з радіусом кривошипа. 29369 пп. 2-4 формули винаходу; при виконанні у цій сукупності кривошипа опозитно рівноплечим і приєднання додаткового коромисла дозволить зняти із співвісних валів копіра і кривавила згинаючі навантаження із збереженням тільки крутильного момента; внаслідок створення кінематичного ромба здійснюється розвантаження пліч коромисел від згинаючих навантажень, а також на базі шатунів - коромисел можна приєднати ще один додатковий механізм для перетворення обертального руху в коливальний, який працюватиме в протилежному напрямку; у механізмі за п. 1-5 досягається найбільша жорсткість, що очевидно. Для рішення вищевказаної задачі і досягнення перерахованих технічних результатів у механізмі для перетворення обертального руху в коливальним, що містить кривошип, кінематично зв'язаний з коромислом, згідно винаходу кінематичний зв'язок кривошипа з коромислом здійснено за допомогою шарніра, причому плечі коромисла мають можливість одночасно взаємодіяти з робочою поверхнею введеного у пристрій копіра, що має можливість обертатися, і рівні по довжині з радіусом кривошипа, кривошип може бути виконано опозитно рівноплечим і до вільного плеча приєднано додаткове коромисло аналогічне вищезгаданому, а одноіменні плечі коромисел шарнірно з'єднані між собою шатунами - коромислами з утворенням кінематичного ромба, середні шарніри шатунів-коромисел при цьому можуть бути з'єднані між собою за допомогою додаткового опозитно рівноплечого к кривошипа співвісного з копіром; крім того можливий варіант, коли коромисла, додаткові коромисла і шатуни-коромисла виконані у вигляді зубчатих секторів, зачіплених із загальним зубчатим центральним колесом співвісним з кривошипом, причому довжина початкового радіуса зубчатих секторів дорівнює довжині плача коромисла. Винахід проілюстровано кресленнями, де: на фіг. 1-2 показано два варіанти кінематичної схеми за п. 1 формули винаходу; на фіг. 3 - те ж саме, за пп. 1-2 формули винаходу; на фіг. 4 - те ж саме, за пп. 1-3 формули винаходу; на фіг. 5 - те ж саме, за пп. 1-4 формули винаходу; на фіг. 6 - те ж саме, за пп. 1-5 формули винаходу. Механізм Щелкунова для перетворення обертального руху в коливальний містить кривошип 1 кінематично за допомогою шарніра зв'язаний з коромислом 2, плечі якого мають можливість одночасної взаємодії з робочою поверхнею копіра 3, що обертається, і дорівнюють за довжиною радіусу кривошипа, що обумовлено необхідністю прямолінійного переміщення шарнірів пліч коромисла 2. На фіг. 1 показано варіант паралельного розташування осей коливання кривошипа 1 і осі обертання копіра 3, виконаного всьому випадку несиметричним. При співвісному розташуванні осі обертання копіра 3 з оссю качання кривошипа 1 (фіг. 2) копір 3 виконано симетричним. Дня навантаження копіра 3 тільки крутильним моментом (фіг. 3) кривошип 1 виконано опозитно рівноплечим і до його вільного плеча приєднано додаткове коромисло 4 аналогічне вищезгаданому. Робоча поверхня копіра 3 взаємодіє з плечами коромисел 2, 4 за допомогою роликів 5. Щоб зняти згибаючі моменти з коромисел 2 одноіменні плечі останніх з'єднано між собою шатунами-короми слами 6 з утворенням кінематичного ромба (фіг. 4), при цьому можна з'єднати середні шарніри шатунів-коромисел 6 між собою за допомогою додаткового опозитно рівноплечого кривошипа 7, співвісного з копіром 3, кривошипом 1 і осою обертання (фіг. 5). Можливий також варіант, що характеризується підвищеною жорсткістю і точністю механізму, представлений на фіг. 6, згідно якому коромисла 2, 4 і шатуни-коромисла 6 виконані у вигляді зубчатих секторів, зачіплених із спільним зубчатим центральним колесом 8 співвісним з кривошипом 1, причому початковий радіус зубчатих секторів дорівнює довжині плеча коромисла. Механізм Щелкунова для перетворення обертального руху в коливальний працює таким чином. При роботі механізма за фіг. 1-2 копіру 3 надається обертальний рух навколо осі О1 в будь якому напрямку. Його робоча поверхня діючи через ролики 5 на коромисло 2, заставляв коромисло 2 повернутися навколо середнього шарніра при одночасному прямолінійному переміщенні осей роликів 5 по осям X, Y і тим самим повернутися кривошипу 1 навколо осі 0. Закон зміни кривої робочої, поверхні копіру 3 такий, що ролики 5, змонтовані на плечах коромисла 2, знаходяться у постійному контакті з копіром 3, при цьому, коли один ролик 5 знаходиться на максимальному радіусі кривої копіру 3, другий знаходиться на мінімальному радіусі кривої копіру 3. При безперервному обертанні копіру 3 ролики 5 на кривій копіра 3 періодично змінюють своє розташування, при цьому кривошип 1 повертається в діапазоні від мінімума до максимума і назад згідно з переміщенням середнього шарніра коромисла 2. При роботі механізма по фіг. 3 коромисла працюють паралельно завдяки симетричності копіра 3 і рівноплечності кривошипа 1. При роботі механізма по фіг. 4 механізм працює аналогічно вищеописаному, при цьому шатуни-коромисла 6 по відношенню до суміжних коромисел 2 і 4 повертаються навколо свого середнього шарніра в протилежному напрямку, а по відношенню один до одного - паралельно. При роботі пристрою по фіг. 5, що складається з двох механізмів, завдяки паралельному повороту шатунівкоромисел 6, приєднаний до них кривошип 7 обертається від мінімума до максимума, аналогічно кривошипу 1, але в протилежному напрямку поворота кривошипа 1. Таким чином ланки: коромисел 2, 4 і кривошипу 1 з одного боку і ланки: шатуни-коромисла 6 і кривошип 7 з другого боку, утворюють два механізми, що працюють у взаємно протилежних напрямках. Механізм за п. 6 працює аналогічно двом механізмам по фіг. 5, при цьому коромисла 2, 4, шатуни-коромисла 6 зубчатим вінцем обкочуються без скользіння по загальному зубчатому центральному колесу 8, розвантажуючи кривошипи 1, 7 від розтягуючих напружень. Колесо 8 в цьому варіанті можна встановлювати вільно на осі, що не змінить кінематику механізму. В механізмі по фіг. 6 допустимо коливальний рух знімати безпосередньо із середніх шарнірів зубчатих секторів відомими способами. Таким чином за допомогою механізма Щелкунова при безперервному обертанні копіра 3 в будь якому напрямку отримуємо за один його оборот два повних коливан 2 29369 ня кривошипа 1, амплітуда і закон зміни швидкості в межах від мінімума до максимума і назад яких визначається законом зміни радіуса робочої пове рхні копіру 3 при збереженні відносного лінійного переміщення шарнірів пліч коромисел 2, 4 і шатунів-коромисел 6. Фіг. 1 Фіг. 2 3 29369 Фіг. 3 Фіг. 4 4 29369 Фіг. 5 Фіг. 6 5 29369 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2002 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 34 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 6
ДивитисяДодаткова інформація
Назва патенту англійськоюSchelkunovs mechanism for transformation of rotary motion to vibratory one
Автори англійськоюVoronoi Vitalii Stepanovych, Pryschepa Mykola Petrovych, Schelkunov Yehor Yelyseiovych
Назва патенту російськоюМеханизм щелкунова для преобразования вращательного движения в колебательное
Автори російськоюВороной Виталий Степанович, Прищепа Николай Петрович, Щелкунов Егор Елисеевич
МПК / Мітки
МПК: F16H 21/40
Мітки: перетворення, руху, механізм, щелкунова, обертального, коливальний
Код посилання
<a href="https://ua.patents.su/6-29369-mekhanizm-shhelkunova-dlya-peretvorennya-obertalnogo-rukhu-v-kolivalnijj.html" target="_blank" rel="follow" title="База патентів України">Механізм щелкунова для перетворення обертального руху в коливальний</a>
Механізм для перетворення обертального руху в поступальний і навпаки
Номер патенту: 149
Опубліковано: 30.04.1998
Автор: Сердюк Юрій Петрович
МПК: F16H 19/00
Мітки: руху, обертального, механізм, перетворення, навпаки, поступальний
Формула / Реферат:
Механизм для преобразования вращательного движения в поступательное и наоборот, содержащий первую зубчатую рейку и кинематически связанный с ней вал, отличающийся тем, что механизм снабжен корпусом, в котором установлена параллельная первой вторая зубчатая рейка, ось вала перпендикулярна плоскости, проходящей через зубчатые рейки, и расположена на середине расстояния между ними, в корпусе выполнено сквозное отверстие, ось которого...
Пристрій для перетворення обертального руху в зворотно-поступальний
Номер патенту: 5086
Опубліковано: 28.12.1994
Автор: Кравченко Федір Васильович
МПК: F16H 19/00
Мітки: зворотно-поступальний, руху, обертального, пристрій, перетворення
Формула / Реферат:
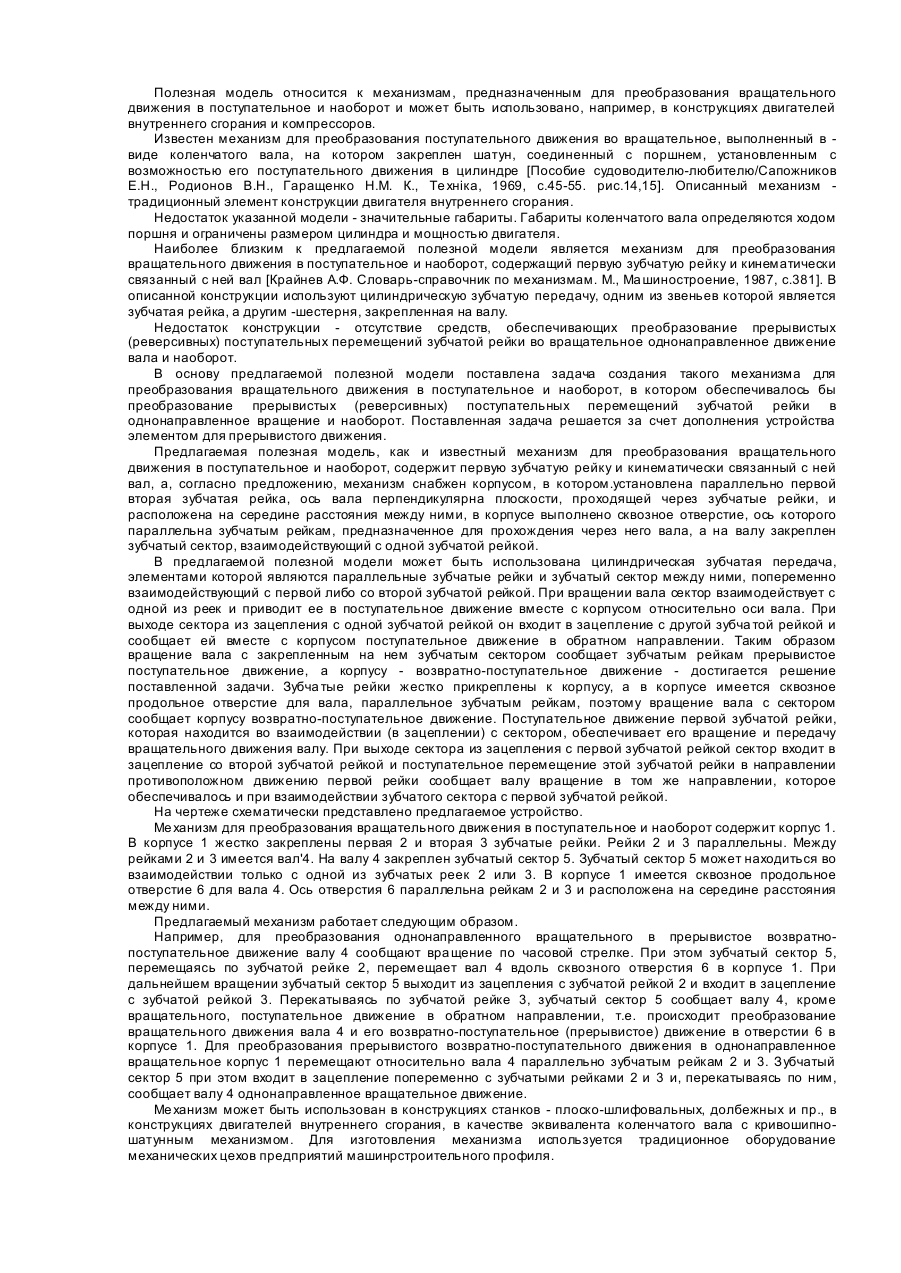
1. Устройство для преобразования вращательного движения в возвратно-поступательное, содержащее ведущее и ведомое звенья и охватывающую ведущее звено гибкую связь, отличающееся тем, что, с целью расширения кинематических возможностей, ведущее звено выполнено со сбрасывающим гибкую связь винтовым ребром и двумя соединенными последним фланцами, из которых один с плавно изменяющейся против хода вращения от максимальной у ребра до уровня...
Механізм для перетворення зворотно-поступального руху у обертальний і навпаки
Номер патенту: 15046
Опубліковано: 30.06.1997
Автор: Костіцин Валентин Іванович
МПК: F16H 21/40, F16H 21/10, F16H 25/00
Мітки: зворотно-поступального, перетворення, руху, навпаки, обертальний, механізм
Формула / Реферат:
1. Механизм для преобразования возвратно-поступательного движения во вращательное и наоборот, содержащий корпус, оппозитно установленные в нем поршни со штоком, промежуточное звено и вал, отличающийся тем, что вал выполнен коленчатым, его коренные шейки сопряжены с боковыми стенками корпуса с совмещением их осей, а промежуточное звено выполнено в виде эксцентрика в форме диска с эксцентриковым отверстием под кривошипную шейку вала и...
Гірорушій обертального руху
Номер патенту: 21824
Опубліковано: 30.04.1998
Автор: Жуковський Леонід Михайлович
МПК: G01C 19/00, B64G 1/28
Мітки: руху, обертального, гірорушій
Формула / Реферат:
Гиродвижитель безопорного вращательного движения, содержащий спаренную систему гироскопов, расположенных в одной плоскости, вращающихся в противоположных направлениях, установленных в карданном подвесе, состоящем из двух внутренних рамок и одной общей наружной рамки, обеспечивающих гироскопам три степени свободы, в котором с указанной системой связан электромагнитный привод линейного действия, служащий для создания внешних сил,...
Прилад для демонстрації законів обертального руху
Номер патенту: 665
Опубліковано: 15.12.1993
Автор: Поздняков Леонтій Костантинович
МПК: G09B 23/08
Мітки: прилад, руху, демонстрації, законів, обертального
Формула / Реферат:
Формула изобретения Прибор для демонстрации законов вращательного движения, содержащий штангу, связанную с приводным механизмом, установленный на ней полый стержень и тело, связанное с динамометром тросом, проходящим через полый стержень.отличающийся тем, что, с целью повышения наглядности, он имеет механизмы для приведения тела в сложное планетарное движение, штанга выполнена из нескольких частей, при этом соседние концы одной из...
Попередній патент: Лікарська форма для терапії запальних захворювань шийки матки
Наступний патент: Головка тангенціальна шліфувальна (варіанти)
Випадковий патент: Склад для боротьби проти ведмедика звичайного контактно-кишкової дії