Тренажер

Формула / Реферат
1. Тренажер (1) з платформою (3) для особи, що тренується, в якому платформа (3) з'єднана з опорною плитою, в якому з платформою (3) зв'язаний щонайменше один датчик (51) прискорення та/або датчик нахилу, причому датчик (51) прискорення та/або датчик нахилу виконаний з можливістю підключення до лінії (54) передачі даних та передбачена можливість живлення енергією датчика (51) прискорення та/або датчика нахилу через лінію (54) передачі даних, та який обладнаний демпферним елементом (6), зокрема регулівним, для демпфування коливних рухів платформи (3), та зворотним елементом (7), зокрема регулівним, для повертання платформи (3) у задане положення, який відрізняється тим, що платформа (3) виконана з можливістю хитання навколо лише однієї осі (42) хитання, нерухомої відносно платформи та опорної плити.
2. Тренажер (1) за п. 1, який відрізняється тим, що датчик (51) прискорення та/або датчик нахилу виконаний в ударостійкому варіанті, причому за варіантом, якому віддається перевага, коефіцієнт ударного навантаження перевищує 500g, зокрема, перевищує 5000g.
3. Тренажер (1) за п. 1 або п. 2, який відрізняється тим, що датчик (51) прискорення та/або датчик нахилу придатний для виконання вимірювань при поворотах щонайменше на 20°.
4. Тренажер (1) за одним з пп. 1-3, який відрізняється тим, що живлення тренажера енергією здійснюється через інтерфейс типу USB або типу Bluetooth.
5. Тренажер (1) за одним з пп. 1-4, який відрізняється тим, що опорна плита (2) має протиковзну нижню сторону.
6. Тренажер (1) за одним з пп. 1-4, який відрізняється тим, що він є складовою частиною тренувальної системи, і лінія (54) передачі даних підключена до блока (8) попередньої обробки результатів.
Текст
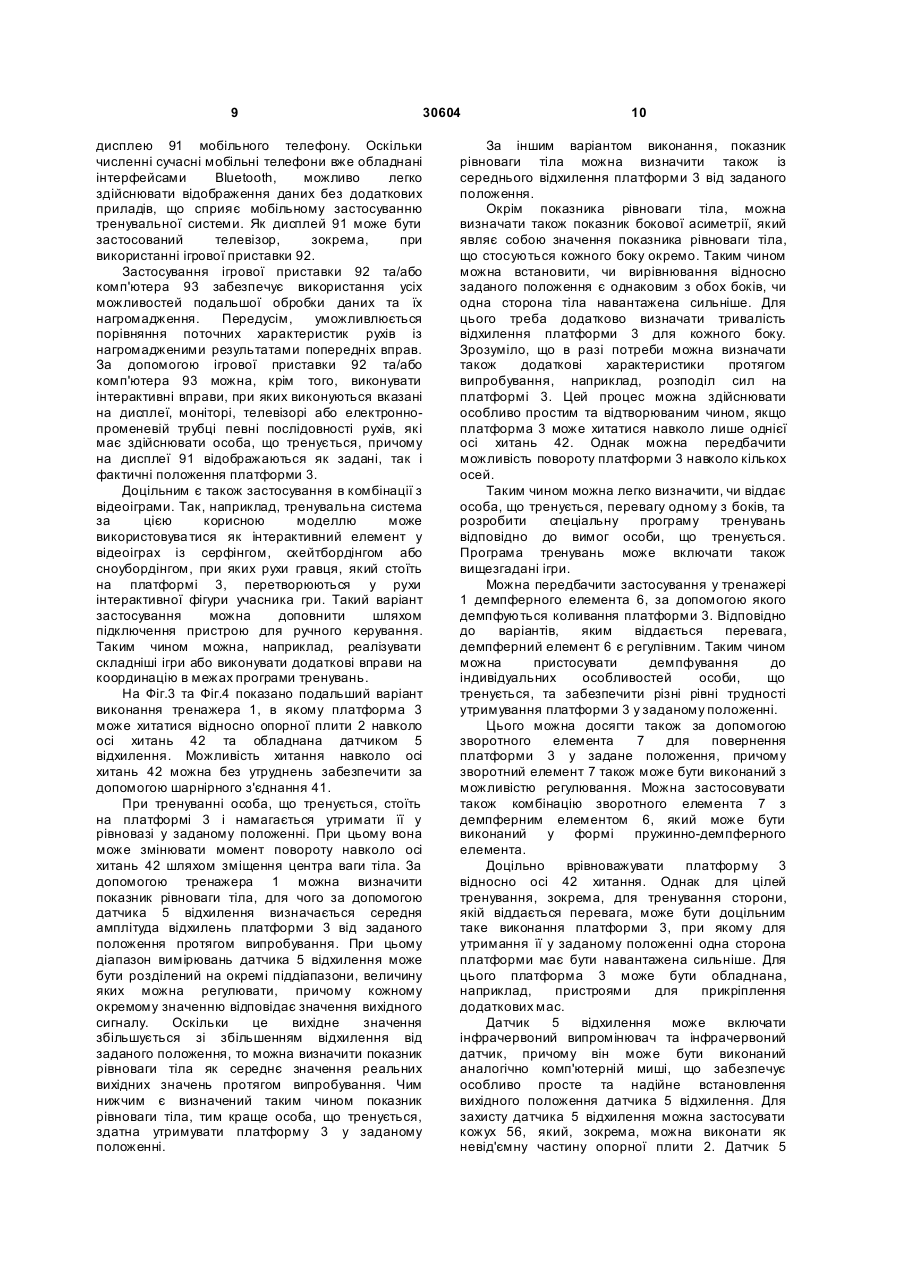
1. Тренажер (1) з платформою (3) для особи, що тренується, в якому платформа (3) з'єднана з опорною плитою, в якому з платформою (3) зв'язаний щонайменше один датчик (51) прискорення та/або датчик нахилу, причому датчик (51) прискорення та/або датчик нахилу виконаний з можливістю підключення до лінії (54) передачі даних та передбачена можливість живлення енергією датчика (51) прискорення та/або датчика нахилу через лінію (54) передачі даних, та який обладнаний демпферним елементом (6), зокрема регулівним, для демпфування коливних рухів платформи (3), та зворотним елементом (7), зокрема регулівним, для U 2 30604 1 3 30604 задані вправи можна виконувати лише з утрудненням, отже, особа, що тренується, навряд чи може раціонально контролювати успішність виконання вправ, передусім, під час тренування. Крім того, динамічні вправи, наприклад, нахили тулуба в певних межах, не можуть виконуватися свідомо, оскільки вони не можуть контролюватися особою, що тренується. Далі, слід зазначити, що для успіху тренування важливо, щоб вправи виконувалися з напруженням та з інтересом та в особи, що тренується, виникав спонукальний мотив до виконання вправ, бо в іншому разі особа часто обмежується виконанням лише обов'язкової програми. У патенті США №5,919,150 А описано динамічну систему для визначення фізичної нестійкості людини, в якій як платформа для особи, що тренується, використовується хитна платформа, яка у першому варіанті здійснення утворена кульовим сегментом. У платформі змонтовано датчик нахилу, який подає сигнал на комп'ютер. Комп'ютер керує дисплеєм, на якому зображено мету вправи та курсор, положення якого визначається положенням платформи. У патенті ЕР 0 862 930 А описано тренувальний або реабілітаційний пристрій з хитною платформою, причому за першим варіантом здійснення платформа виконана у формі плити, що може хитатися навколо осі, яка, зокрема, з'єднана з опорною плитою. У другому варіанті здійснення пропонується платформа, яка спирається на опорну плиту тільки однією точкою. Для вимірювання нахилу платформи запропоновано дві системи: перша система, що працює на основі потенціометра, опір якого змінюється залежно від кута нахилу, та друга система, яка працює безконтактно з використанням лазерів. Для обробки даних передбачено застосування мікропроцесорного вузла, з'єднаного з комп'ютером через стандартний інтерфейс RS-232. У патенті США №5,613,690 А описано систему для тренування зберігання рівноваги, яка включає платформу, що спирається на опорну плиту, причому передбачено, що опорна плита або платформа має опуклу поверхню, а другий елемент згаданої пари має відповідну протилежну поверхню. Передбачено застосування датчиків для вимірювання кутового зміщення платформи, та можуть бути наявними пружини або демпфери для обмеження здатності платформи до переміщення. У патенті США №6,543,769 В1 описано пристрій для моделювання сноуборда або скейтборда, де дошка має задню опору у формі частини кулі та передню опору у формі сегмента кола. Передбачено щонайменше один датчик для вимірювання прокручування задньої опори. Однак можуть застосовуватися також інші датчики для вимірювання нахилу передньої опори. У патенті США №5,360,015 описано тренажер, який включає опорну плиту та платформу, причому платформа може повертатися відносно опорної плити навколо тільки однієї фіксованої осі. Крім того, передбачено стопори для запобігання 4 надмірного нахилу платформи, а також датчик відхилення. Таким чином, метою цієї корисної моделі є створення тренажера вищезазначеного типу, в якому можна уникнути відомих вад та який уможливлює відображення рухів особи, що тренується, для об'єктивної оцінки особи, що тренується, для виконання програми тренування та/або для керування обчислювальним пристроєм та у відповідних випадках для координації тренування з використанням мотиваційного програмного забезпечення, який має просту будову та нечисленні зв'язки, який уможливлює швидкий монтаж та демонтаж і тому придатний для мобільного застосування. Згідно з корисною моделлю, ця мета досягається тим, що платформа виконана з можливістю хитання відносно тільки однієї осі хитання, нерухомої відносно платформи та опорної плити. При цьому тренажер має особливо просту конструкцію, оскільки хитання платформи можливе навколо тільки однієї осі. За допомогою такого тренажера можна надійно визначити стабільність положення тіла та/або його бокову асиметрію, причому ці характеристики встановлюються об'єктивно та відтворювано і дозволяють уникнути додаткових рухів платформи. Ці характеристики можна негайно використати для розроблення спеціальної програми тренувань. Таким чином можна зменшити кутову швидкість коливних рухів і, отже, полегшити особі, що тренується, утримування платформи у заданому положенні. Демпферний елемент можна застосовувати, зокрема, при вправах, які виконуються з метою тренування. За допомогою регулівного демпферного елемента можна особливо легко впливати на особу, що тренується, та викликати у неї відчуття успіху. За допомогою зворотного елемента можна забезпечити повернення ненавантаженої платформи у задане положення та утримання її в цьому положенні. За допомогою регулівного зворотного елемента можна забезпечувати більшу або меншу трудність утримування платформи у заданому положенні. Таким чином можна спонукати особу, що тренується, надавати платформі відповідні прискорення та/або кути нахилу. Шляхом інтегрування можна визначати з вимірюваних характеристик швидкість та шлях рухів платформи. Таким чином, можна безперервно реєструвати положення платформи, починаючи з початкового стану. Оскільки датчик прискорення живиться струмом через лінію передачі даних, забезпечується просте та зручне підключення тренажера. Таким чином, тренажер може швидко та просто змонтувати та ввести в дію навіть особа з незначною технічною підготовкою і, отже, він є особливо придатним для мобільного застосування. У іншому варіанті здійснення корисної моделі можна передбачити виконання датчика прискорення та/або датчика нахилу в ударостійкому варіанті, причому за варіантами, яким віддається перевага, коефіцієнт ударного 5 30604 навантаження перевищує 500g, зокрема, перевищує 5000g. Таким чином, датчик прискорення не пошкоджується при ударах платформи об основу, відновлює свою функцію після піднімання платформи з основи та може реєструвати р ухи або прискорення та/або нахили платформи. У цьому зв'язку можна передбачити у іншому варіанті здійснення корисної моделі придатність датчика прискорення та/або датчика нахилу для виконання вимірювань при поворотах щонайменше на 20°. Таким чином, датчик прискорення та/або датчик нахилу забезпечує реєстрацію прискорень та/або нахилів платформи при максимальних очікуваних амплітудах хитання платформи відносно основи. Згідно із ще одним варіантом здійснення корисної моделі, можна передбачити живлення тренажера енергією через інтерфейс типу USB або типу Bluetooth. Таким чином можна за допомогою стандартного пристрою передачі даних забезпечити також енергопостачання датчика прискорення. Ще один варіант здійснення корисної моделі може включати застосування опорної плити, що має протиковзну нижню сторону, що забезпечує уникнення можливих ковзань платформи, передусім, у випадках невпевненості особи, що тренується, зокрема, при тренуваннях літніх людей або осіб із порушеннями рівноваги. Далі, корисна модель стосується тренажера, в якому лінія передачі даних з'єднана з блоком попередньої обробки результатів. Таким чином можна обчислювати прискорення, нахили та/або рухи тренажера та в разі необхідності порівнювати одержані дані з результатами інших вправ, чим забезпечується об'єктивна оцінка успішності тренування. Корисну модель описано нижче з посиланнями на рисунки, що додаються, на яких представлені варіанти здійснення корисної моделі, яким віддається особлива перевага. При цьому: на Фіг.1 представлено перший варіант виконання тренажера, з'єднаного з комп'ютером та ігровою приставкою; на Фіг.2 зображено другий варіант виконання тренажера, з'єднаного з дисплеєм; на Фіг.3 показано вигляд спереду третього варіанта виконання тренажера за цією корисною моделлю; на Фіг.4 показано вигляд збоку тренажера, зображеного на Фіг.3. На Фіг.1 та 2 показано два варіанти виконання тренувальної системи, яким віддається особлива перевага. Система включає тренажер 1, з'єднаний лінією 54 передачі даних з блоком 8 попередньої обробки результатів. Тренажер 1 вищезазначеного типу має платформу 3 для особи, що тренується, причому платформа 3 може повертатися та/або хитатися навколо щонайменше однієї осі, причому з платформою 3 з'єднаний щонайменше один датчик 51 прискорення та/або датчик нахилу, причому, крім того, лінія 54 передачі даних може бути підключена до датчика 51 прискорення та/або датчика нахилу, і енергопостачання датчика 51 6 прискорення та/або датчика нахилу забезпечується через лінію 54 передачі даних. На Фіг.1 показано перший варіант виконання тренажера за цією корисною моделлю, якому віддається особлива перевага. За цим варіантом, тренажер 1 має платформу 3, яка з'єднана з опорною плитою 2 за допомогою центрального елемента 46 зв'язку, відповідно до варіанта, якому віддається перевага, співвісно. За варіантом, якому віддається перевага, опорна плита 2 та платформа 3 мають однакову форму та однакові площі основи. Однак можливі також варіанти, де з'єднані між собою опорні плити 2 та платформи 3 мають різні форми. За варіантом, якому віддається перевага, опорна плита 2 має протиковзну нижню сторону, наприклад, вона обладнана гумовими накладками або присосками. Таким чином можна запобігти неконтрольованому ковзанню платформи 3 та/або опорної плити 2. Центральний елемент 46 зв'язку у першому варіанті здійснення корисної моделі, якому віддається особлива перевага, виконаний у формі елемента 46, який витримує осьове щонайменше стискальне навантаження та може згинатися і тим самим уможливлює нахилення платформи 3 відносно опорної плити 2. При цьому передбачається, що платформа 3 може вільно нахилятися у будь-якому напрямі. Можна виконати конструкцію таким чином, щоб елемент 46 зв'язку уможливлював практично недемпфоване нахилення до упору краю платформи 3 у опорну плиту 2. При цьому можна також забезпечити прилягання платформи 3 у стані спокою до одного місця опорної плити 2. Однак можна також виконати центральний елемент 4б зв'язку пружним, так, щоб він при збільшенні нахилу створював рівномірний, зворотний момент, що зменшується або зростає, і, таким чином, створював тенденцію до повернення платформи 3 у рівноважне положення. При такому виконанні можна забезпечити встановлення ненавантаженої платформи 3 у рівноважному положенні, яке практично збігається з представленим на Фіг.1 паралельному розташуванню платформи 3 та опорної плити 2. Особливою перевагою такої конструкції є те, що наявність зворотного моменту уможливлює спрощення виконання вправ особою, що тренується, що значно полегшує тренування, передусім для початківців. Центральний елемент 46 зв'язку може бути виконаний з будь-якого матеріалу, що відповідає вищезгаданим вимогам. За варіантом, якому віддається перевага, центральний елемент 46 зв'язку у першому варіанті тренажера, якому віддається перевага, виконаний з пружних матеріалів, зокрема, з піноматеріалів, пластмас, гуми то що, та/або включає пружні компоненти, зокрема, металеві пружини, відповідно до варіанта, якому віддається перевага, натискні сталеві пружини, або заповнений газом рукав або кулю. Можна застосовувати також комбінацію таких матеріалів та компонентів, зокрема, сталеві натискні пружини, заглиблені у піноматеріал. На Фіг.2 показано другий варіант виконання тренажера 1 за цією корисною моделлю. У цьому 7 30604 варіанті платформа 3 має центральну опору 44, причому опора 44 у варіанті, якому віддається перевага, має форму півкулі, циліндра або подушки. При цьому платформа 3 встановлюється безпосередньо на основу без застосування додаткової опорної плити 2. Центральна опора 44 у варіантах, яким віддається перевага, виконана пружною, відповідно до варіанта, якому віддається перевага, у формі пружинного елемента, з гумоподібного пружного матеріалу, у формі заповненого повітрям елемента та/або з піноматеріалу. Виконання центральної опори 44 з пружного матеріалу дозволяє зменшити навантаження на основу. Тренажер 1 за другим варіантом здійснення корисної моделі, якому віддається перевага, у принципі уможливлює також відривання тренажера від підлоги. Платформа 3 може бути додатково обладнана хомутами для ніг, що уможливлює виконання підскоків із тренажером 1. За подальшими варіантами виконання, тренажер може бути обладнаний двома або більше з'єднувальними елементами або опорами, розташованими вздовж однієї осі, що забезпечує наявність однієї осі хитання, якій віддається перевага, тоді як хитання навколо інших осей обмежується. Тренажер 1 за цією корисною моделлю обладнаний щонайменше одним датчиком 51 прискорення та/або датчиком нахилу. Датчик приєднаний до платформи 3 або вбудований у цю платформу. Відповідно до варіанта, якому віддається перевага, може застосовуватися комбінований датчик прискорення та нахилу. Да тчик такого типу з точки зору принципу вимірювання може бути виконаний як датчик 51 прискорення, причому у датчик вбудований елемент для вимірювання реального нахилу відносно вихідного положення. Перевагою такого датчика є те, що при ударах платформи 3 об основу він не видає стрибкоподібного зростання сигналу прискорення, обробка якого ускладнює функціонування електронного блока попередньої обробки результатів, а видає реальне значення нахилу. Описані нижче варіанти виконання датчика 51 прискорення, яким віддається перевага, стосуються переважно також комбінованих датчиків прискорення та нахилу. З точки зору принципу вимірювання датчик 51 прискорення може являти собою датчик прискорення будь-якого типу; перевага віддається ємнісним, індуктивним та/або п'єзоелектричним датчикам прискорення. Оскільки платформа 3 у процесі експлуатації тренажера може зіштовхуватися з опорною плитою 2 або з основою, датчик 51 прискорення має витримувати високі прискорення, що виникають у таких випадках. Тому перевага віддається ударостійкій конструкції датчика 51 прискорення, причому коефіцієнт ударного навантаження перевищує 500g, зокрема, перевищує 5000g. Оскільки кути хитання або нахили платформи 3 відносно опорної плити 2 та/або основи можуть бути досить значними, у варіантах, яким віддається перевага, 8 датчик 51 прискорення має бути розрахований на вимірювання нахилів щонайменше 20°. Цим досягається охоплення всього діапазону нахилів або хитань. Відповідний вибір датчика 51 прискорення, здатного сприймати прискорення повороту навколо кількох осей, забезпечує можливість застосування у тренажері незначної кількості датчиків 51 прискорення, найкраще єдиного датчика, змонтованого на платформі 3. Відповідно до варіанта, якому віддається перевага, передбачається монтаж у межах платформи 3 вимірювального моста та/або підсилювача заряду, необхідного для функціонування датчика 51 прискорення. Крім того, передбачається інтерфейс, який перетворює аналоговий вихідний сигнал датчика 51 прискорення, вимірювального моста та/або підсилювача заряду у цифрову форму та готує його для передачі через шину даних. Через цей інтерфейс здійснюється живлення датчика 51 прискорення та інших необхідних електронних пристроїв електроенергією. Відповідно до варіантів, яким віддається перевага, інтерфейс являє собою USB-підключення або Bluetoothпідключення. При застосуванні USB підключені елементи можна живити, наприклад, робочою напругою до 5В при максимальному споживаному струмі 0,5А. Може бути передбачена можливість застосування у комбінації з іншими шиновими інтерфейсами або стандартними шинами, як існуючими на даний час, так і майбутніми. Передбачається включення тренажера 1 за цією корисною моделлю у тренувальну систему, причому тренажер 1 за допомогою лінії 54 передачі даних з'єднується з блоком 8 попередньої обробки результатів. Блок 8 попередньої обробки результатів може являти собою, наприклад, нагромаджувач даних для занесення у пам'ять прискорень, нахилів та/або рухів платформи 3, що уможливлює подальше порівняння сприйнятих даних із нагромадженими даними, які стосуються попередніх циклів вимірювань або вправ. Відповідно до варіантів, яким віддається перевага, блок 8 попередньої обробки результатів може включати пристрій 9 виводу даних на додаток до нагромаджувача даних або замість нагромаджувача даних, або ж блок 8 попередньої обробки результатів може бути зв'язаний з пристроєм 9 виводу даних. Відповідно до варіантів, яким віддається перевага, пристрій 9 виводу даних являє собою дисплей 91 або записувач даних. Дисплей 91 у найпростішому виконанні може бути виконаний як множина світних смужок, які вказують, що платформа 3 утримується у межах діапазону положень, які можна заздалегідь задавати. Відповідно до варіанта, якому віддається перевага, дисплей 91 може бути частиною ігрової приставки 92 та/або комп'ютера 93. Комп'ютер 93 у даному разі означає не тільки персональний комп'ютер IBMсумісний або "Mclntosh", а й будь-яку комп'ютерну систему з відповідним відображенням. Насамперед можна передбачити використання 9 30604 дисплею 91 мобільного телефону. Оскільки численні сучасні мобільні телефони вже обладнані інтерфейсами Bluetooth, можливо легко здійснювати відображення даних без додаткових приладів, що сприяє мобільному застосуванню тренувальної системи. Як дисплей 91 може бути застосований телевізор, зокрема, при використанні ігрової приставки 92. Застосування ігрової приставки 92 та/або комп'ютера 93 забезпечує використання усіх можливостей подальшої обробки даних та їх нагромадження. Передусім, уможливлюється порівняння поточних характеристик рухів із нагромадженими результатами попередніх вправ. За допомогою ігрової приставки 92 та/або комп'ютера 93 можна, крім того, виконувати інтерактивні вправи, при яких виконуються вказані на дисплеї, моніторі, телевізорі або електроннопроменевій трубці певні послідовності рухів, які має здійснювати особа, що тренується, причому на дисплеї 91 відображаються як задані, так і фактичні положення платформи 3. Доцільним є також застосування в комбінації з відеоіграми. Так, наприклад, тренувальна система за цією корисною моделлю може використовува тися як інтерактивний елемент у відеоіграх із серфінгом, скейтбордінгом або сноубордінгом, при яких рухи гравця, який стоїть на платформі 3, перетворюються у рухи інтерактивної фігури учасника гри. Такий варіант застосування можна доповнити шляхом підключення пристрою для ручного керування. Таким чином можна, наприклад, реалізувати складніші ігри або виконувати додаткові вправи на координацію в межах програми тренувань. На Фіг.3 та Фіг.4 показано подальший варіант виконання тренажера 1, в якому платформа 3 може хитатися відносно опорної плити 2 навколо осі хитань 42 та обладнана датчиком 5 відхилення. Можливість хитання навколо осі хитань 42 можна без утруднень забезпечити за допомогою шарнірного з'єднання 41. При тренуванні особа, що тренується, стоїть на платформі 3 і намагається утримати її у рівновазі у заданому положенні. При цьому вона може змінювати момент повороту навколо осі хитань 42 шляхом зміщення центра ваги тіла. За допомогою тренажера 1 можна визначити показник рівноваги тіла, для чого за допомогою датчика 5 відхилення визначається середня амплітуда відхилень платформи 3 від заданого положення протягом випробування. При цьому діапазон вимірювань датчика 5 відхилення може бути розділений на окремі піддіапазони, величину яких можна регулювати, причому кожному окремому значенню відповідає значення вихідного сигналу. Оскільки це вихідне значення збільшується зі збільшенням відхилення від заданого положення, то можна визначити показник рівноваги тіла як середнє значення реальних вихідних значень протягом випробування. Чим нижчим є визначений таким чином показник рівноваги тіла, тим краще особа, що тренується, здатна утримувати платформу 3 у заданому положенні. 10 За іншим варіантом виконання, показник рівноваги тіла можна визначити також із середнього відхилення платформи 3 від заданого положення. Окрім показника рівноваги тіла, можна визначати також показник бокової асиметрії, який являє собою значення показника рівноваги тіла, що стосуються кожного боку окремо. Таким чином можна встановити, чи вирівнювання відносно заданого положення є однаковим з обох боків, чи одна сторона тіла навантажена сильніше. Для цього треба додатково визначати тривалість відхилення платформи 3 для кожного боку. Зрозуміло, що в разі потреби можна визначати також додаткові характеристики протягом випробування, наприклад, розподіл сил на платформі 3. Цей процес можна здійснювати особливо простим та відтворюваним чином, якщо платформа 3 може хитатися навколо лише однієї осі хитань 42. Однак можна передбачити можливість повороту платформи 3 навколо кількох осей. Таким чином можна легко визначити, чи віддає особа, що тренується, перевагу одному з боків, та розробити спеціальну програму тренувань відповідно до вимог особи, що тренується. Програма тренувань може включати також вищезгадані ігри. Можна передбачити застосування у тренажері 1 демпферного елемента 6, за допомогою якого демпфуються коливання платформи 3. Відповідно до варіантів, яким віддається перевага, демпферний елемент 6 є регулівним. Таким чином можна пристосувати демпфування до індивідуальних особливостей особи, що тренується, та забезпечити різні рівні трудності утримування платформи 3 у заданому положенні. Цього можна досягти також за допомогою зворотного елемента 7 для повернення платформи 3 у задане положення, причому зворотний елемент 7 також може бути виконаний з можливістю регулювання. Можна застосовувати також комбінацію зворотного елемента 7 з демпферним елементом 6, який може бути виконаний у формі пружинно-демпферного елемента. Доцільно врівноважувати платформу 3 відносно осі 42 хитання. Однак для цілей тренування, зокрема, для тренування сторони, якій віддається перевага, може бути доцільним таке виконання платформи 3, при якому для утримання її у заданому положенні одна сторона платформи має бути навантажена сильніше. Для цього платформа 3 може бути обладнана, наприклад, пристроями для прикріплення додаткових мас. Датчик 5 відхилення може включати інфрачервоний випромінювач та інфрачервоний датчик, причому він може бути виконаний аналогічно комп'ютерній миші, що забезпечує особливо просте та надійне встановлення вихідного положення датчика 5 відхилення. Для захисту датчика 5 відхилення можна застосувати кожух 56, який, зокрема, можна виконати як невід'ємну частину опорної плити 2. Датчик 5 11 30604 відхилення можна також виконати як датчик 51 прискорення та/або датчик нахилу. Для спрощення подальшої обробки вихідних сигналів можна застосувати інтерфейс 55, за допомогою якого можна з'єднувати датчик 5 відхилення з вивідним пристроєм. Як вивідний пристрій можна застосувати, зокрема, вивідний комп'ютер. За допомогою вивідного комп'ютера можна без утруднень нагромаджувати результати вимірювань та здійснювати їх подальшу обробку. Крім того, можна без утруднень створювати таблиці та діаграми, за допомогою яких результати вимірювань можна демонструвати, зокрема, особі, що тренується. Правильність встановлення тренажера 1 для тренування збереження рівноваги можна легко контролювати, якщо опорна плита 2 обладнана ватерпасом. Таким чином можна легко встановити горизонтальне положення опорної плити 2 у робочому положенні. Інші варіанти виконання тренажера мають лише частину описаних вище ознак, причому можна передбачити будь-які комбінації ознак, зокрема, також і для різних описаних варіантів. 12
ДивитисяДодаткова інформація
Назва патенту англійськоюTraining device
Автори англійськоюAigner Evald A
Назва патенту російськоюТренажер
Автори російськоюАйгнер Эвальд А
МПК / Мітки
МПК: A63B 23/04, A63B 22/00, A61B 5/103, A63B 26/00
Мітки: тренажер
Код посилання
<a href="https://ua.patents.su/6-30604-trenazher.html" target="_blank" rel="follow" title="База патентів України">Тренажер</a>
Тренажер для водного моціону свиней

Номер патенту: 36012
Опубліковано: 16.04.2001
Автори: Іванов Володимир Олександрович, Торська Світлана Миколаївна
МПК: A61D 11/00
Мітки: свиней, тренажер, моціону, водного
Формула / Реферат:
Тренажер для водного моціону свиней, який містить купальну ванну, занурювальну платформу з трапами і тягами, який відрізняється тим, що над занурювальною платформою улаштована розподілювальна рухома перегородка, верхня кромка якої шарнірно закріплена на тягах підйомника, а нижня не доходить до платформи на відстань, достатня для вільного переміщення по ній тварин.
Танковий тренажер

Номер патенту: 72353
Опубліковано: 15.02.2005
Автор: Аранович Олександр Григорович
МПК: G09B 9/04
Формула / Реферат:
1. Танковий тренажер, який містить кабіну та платформи повздовжнього і поперечного переміщення з електроприводами, який відрізняється тим, що кабіна встановлена на кожусі кульової опори, жорстко з'єднаної з траверсою, кожух кульової опори за допомогою конічної передачі з'єднаний з планетарним диском, нижня частина якого контактує з відповідними електроприводами горизонтального нахилу кабіни, встановленими на траверсі і розміщеними один проти...
Тренажер для оздоровлення та реабілітації хворих
Номер патенту: 80049
Опубліковано: 10.08.2007
Автори: Андросов Евгений Дмитрович, Степанова Галіна Володимирівна, Гончаренко Ганна Васильовна, Петренко Ганна Васильовна, Ярошенко Петро Вікторович, Пащенко Віктор Гаврилович
МПК: A63B 69/06, A61H 1/02, A63B 69/00
Мітки: оздоровлення, хворих, тренажер, реабілітації
Формула / Реферат:
1. Тренажер для оздоровлення та реабілітації хворих, який містить симетрично встановлені на обох боках опорної рами підкоси, на яких закріплено підйоми й гальмівний пристрій, який відрізняється тим, що гальмівний пристрій виконано у вигляді рамки, на якій у верхній частині встановлено блок, через який проходить трос, зв'язаний з підйомами, а у нижній частині прикріплені вантажі з можливістю їх переміщення по втулках на рухомій частині рамки,...
Тренажер “орбіта”
Номер патенту: 37609
Опубліковано: 15.05.2001
Автори: Гамалій Володимир Васильович, Канішевський Станислав Михайлович, Петрушевський Іван Іванович
МПК: A61H 11/00, A63B 23/02, A61H 1/02, A63B 23/00
Формула / Реферат:
/21/ 2000020755/54/ /57/ Дата прийняттяРішення23 квітня 2001р. Тренажер, що має основу ,яка несе стійку, на котрій встановлено засіб для розміщення...
Тренажер для тренування м`язів
Номер патенту: 26520
Опубліковано: 25.09.2007
Автори: Поєзднік Максим Володимирович, Леонтьєв Олег Анатолійович
МПК: A63B 21/00, A63B 21/02
Мітки: тренування, м'язів, тренажер
Формула / Реферат:
Тренажер для тренування м'язів, що містить раму, яка складається з двох стійок з ніжками та поперечними планками, до верхньої поперечної планки прикріплені дві вертикальні труби з навантаженнями у вигляді металевих пластин, до стійок рами глухо прикріплені дві П-подібні рамки, до одної з них - нижньої - та до нижньої поперечної планки рами перпендикулярно прикріплені дві труби, до яких, в свою чергу, прикріплене сидіння зі спинкою та робочий...
Попередній патент: Установка для очистки біодизеля від метанолу перегонкою
Наступний патент: Підшипникова опора робочого диска грунтообробного агрегату
Випадковий патент: Спосіб моделювання системного імунокомплексного ушкодження у мишей