Спосіб визначення пускового моменту електродвигуна
Номер патенту: 30884
Опубліковано: 15.12.2000
Автори: Кухарчук Василь Васильович, Козловський Андрій Володимирович, Поджаренко Володимир Олександрович

Формула / Реферат
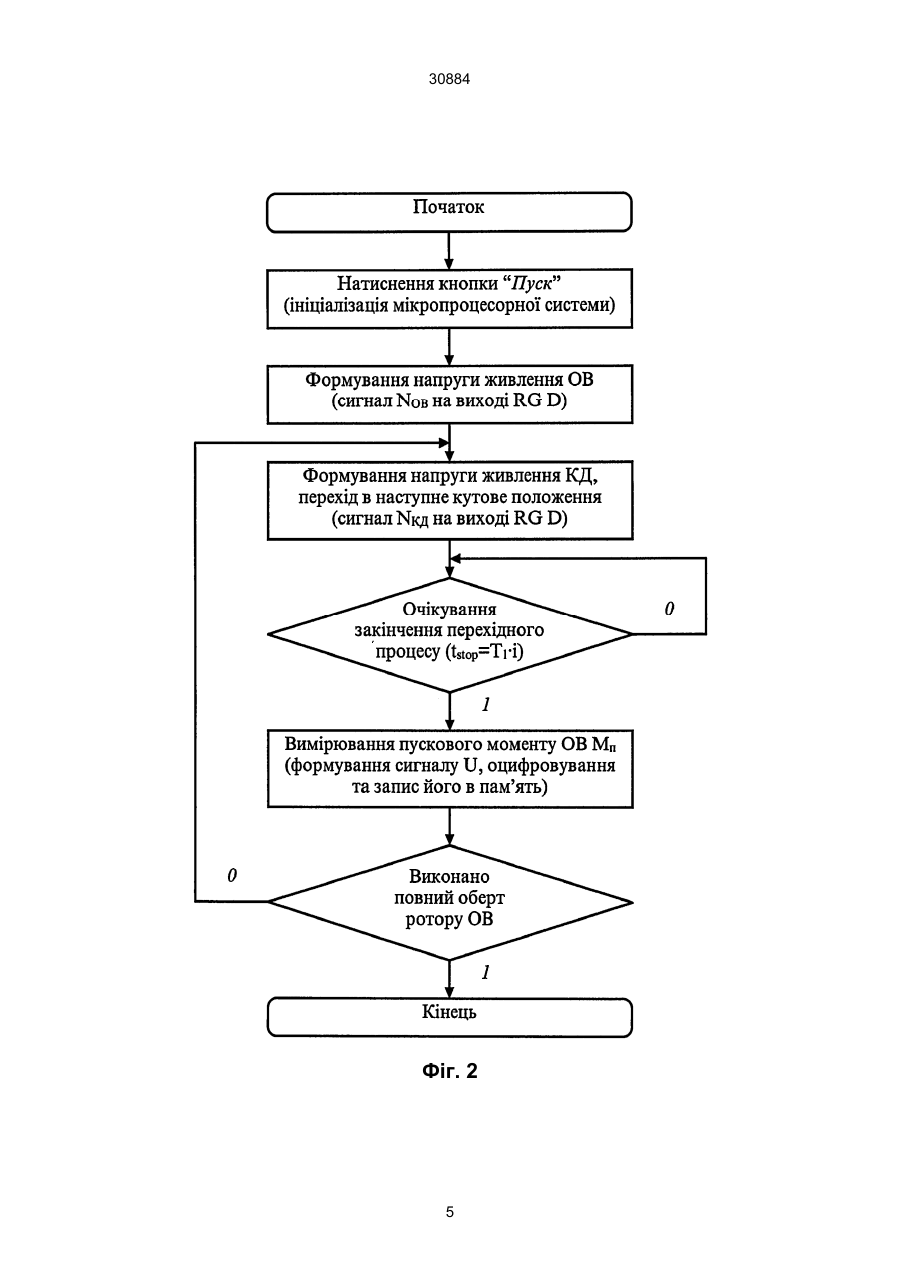
Спосіб визначення пускового моменту електродвигуна шляхом вимірювання поточного значення пускового моменту на його роторі у кожному кутовому положенні, відрізняється тим, що ротор випробуваного двигуна обертають зовнішнім приводним кроковим двигуном в покроковому режимі причому перехід з попереднього кутового положення в наступне здійснюють після закінчення перехідного процесу в перетворювачі, тривалість якого знаходять за формулою:
де Т1 - час першого періоду затухаючих коливань; і - номер амплітудного значення Хі, на якому закінчуються коливання; М - постійна складова моменту; d - нормоване значення похибки.
Текст
Спосіб визначення пускового моменту електродвигуна шляхом вимірювання поточного значення пускового моменту на його роторі у кожному кутовому положенні, відрізняється тим, що ротор випробуваного двигуна обертають зовнішнім приводним кроковим двигуном в покроковому режимі, причому перехід з попереднього кутового положення в наступне здійснюють після закінчення перехідного процесу в перетворювачі, тривалість якого знаходять за формулою: t stop = T1 × i é d ù , Винахід відноситься до вимірювальної техніки і може знайти застосування для вимірювання залежності пускового моменту електродвигуна в функції кутового положення ротора. Відомий спосіб визначення пускового моменту (див.: Коварский Е.М., Янко Ю.И. Испытание электрических машин. - М.: Энергоатомиздат, 1990. С. 80), який здійснюється за допомогою важіля та динамоментра. Вимірювання відбуваються при суто горизонтальному положенні важіля та вертикальному направленні зусилля динамоментра. Для виключення варіації показань вимірювання проводяться двічі: при повільному підніманні важіля, з наближенням до горизонтального положення важіля знизу (проти направлення вимірюємого моменту), та при опусканні важіля зверху. Середнє значення цих двух вимірів представляє діючий на роторі пусковий момент. Недоліками цього способу є велика трудомісткість та низька швидкодія, оскільки процес вимірювання інформативного параметра неавтоматизовано. Крім того, даний спосіб не дозволяє отримати залежність пускового мемента від кутових положень ротора. Відомий спосіб визначення пускового моменту електричних двигунів, що базується на використанні вимірювального перетворювача пускового моменту. Даний перетворювач дозволяє отримати залежність пускового моменту від кутового положення ротору відносно статору в автоматизованому режимі і являє собою станину на якій жорстко закріплений випробуваний двигун, ротор якого за допомогою муфти спряження з'єднаний з ротором приводного двигуна, який закріплений на станині балансирно; на корпусі приводного двигуна закріплений вимірювальний важіль, що діє на сенсор зусилля і дозволяє фіксувати значення пускового моменту у кожному кутовому положенні ротора (див.: А.с. СРСР № 1328695, кл. G01L3/10, 1987, № 29). Суть способу полягає в тому, що ротор електродвигуна, який випробується, обертають з заданою швидкістю за допомогою приводного двигуна і одночасно фіксують кутове положення ротора та обертаючий момент на ньому. При цьому на протязі першого оберта випробуваний двигун обезструмлений, а на протязі другого - заживлений від електричної мережі. Значення пускового моменту Мп в заданому кутовому положенні визначається згідно з формулою: Мп=Мр-Мс (1) де Мр - обертаючий момент на двигуні коли подано живлення; Mс - обертаючий момент на двигуні коли не подано живлення. В даному способі систематична D складова похибки зменьшується завдяки запропонованому алгоритму вимірювання (за два оберти приводного двигуна). Тому, основною складовою похибки ви& мірювання є випадкова D . Найбільш суттєвим чинником цієї складової похибки є: момент опору в підшипниках об'єкту вимірювання (випробовуваного електродвигуна) та приводного двигуна. ê X i £ M× 100% , i = 0...¥ ú û ë (19) UA (11) 30884 (13) A де Т1 - час першого періоду затухаючих коливань; і - номер амплітудного значення Хі, на якому скінчуються коливання; М - постійна складова моменту; d -нормоване значення похибки. 30884 мірювання пускового моменту після завершення перехідного процесу. Такий режим обертання двигуна, що випробовується, протягом одного повного оберту виключає появу методичної похибки, тому що величина сковзання у кожному кутовому положенні крокового двигуна після закінчення перехідного процесу у вимірювальному перетворювачі дорівнює одиниці. Суттєвим параметром, який дозволяє реалізувати запропоновану методику - є час перехідного процесу, величина якого буде впливати на кількість кутових положень, де вимірюється пусковий момент. Пропонується наступна методика розрахунку часу перехідного процесу у вимірювальному перетворювачі. Диференціальне рівняння, що описує процес руху рухомої частини перетворювача має такий вигляд: Найбільш близьким технічним рішенням є спосіб визначення пускового моменту електродвигуна (див.: Патент України № 26636, МПК 6, кл. G01L3/10, від 06.01.1998). Суть відомого способу полягає в тому, що шляхом реєстрації поточного значення обертаючого моменту Мр на роторі заживленого випробуваного електродвигуна, що обертається з заданою швидкістю зовнішнім приводом, де одночасно з обертанням ротора реєструють поточний кут його повороту, причому до подання живлення на випробуваний електродвигун протягом одного оберта реєструють поточне значення діючого на ротор обертаючого моменту Мс, а значення пускового моменту Мп у заданому кутовому положенні ротору знаходять як різницю значень Мр и Мс, зареєстрованих при заданому кутовому положенні ротора. Приводний двигун обертають на протязі одного повного оберта без з'єднання його з валом двигуна, який випробується. В процесі цього оберта вимірюють поточне значення обертаючого моменту Мпд. А безпосереднє значення пускового моменту двигуна у конкретному кутовому положенні знаходять згідно з формулою: Мп=Мр-Мпд, (2) де Мр - обертаючий момент на роторі заживленого випробуваного електродвигуна. Спільною ознакою протопила та винаходу є процес реєстрації поточного значення обертаючого моменту, що здійснюється за допомогою зовнішнього приводу. До недоліків прототипа можна віднести низьку швидкодію (вимірювання за 2 оберти приводного двигуна) та невисоку точність вимірювань, зумовлену систематичною складовою похибки (сковзання S¹1). В основу винаходу поставлено задачу розробки способу визначення пускового моменту електродвигуна, в якому шляхом введення нових операцій забезпечується вилучення систематичної методичної похибки (значне підвищення точності), яка виникає з того, що ротор випробуваного двигуна повільно обертається в момент фіксування значення пускового моменту. При цьому досягаються споживчі якості, спрямовані на підвищення точності вимірювання шляхом виключення методичної похибки, яка виникає з причини відхилення сковзання від одиниці (S
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of start torque of electric motor
Автори англійськоюKozlovskyi Andrii Volodymyrovych, Kukharchuk Vasyl Vasyliovych, Podzharenko Volodymyr Oleksandrovych
Назва патенту російськоюСпособ определения пускового момента электродвигателя
Автори російськоюКозловский Андрей Владимирович, Кухарчук Василий Васильевич, Поджаренко Владимир Александрович
МПК / Мітки
МПК: G01L 3/10
Мітки: моменту, визначення, електродвигуна, пускового, спосіб
Код посилання
<a href="https://ua.patents.su/6-30884-sposib-viznachennya-puskovogo-momentu-elektrodviguna.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення пускового моменту електродвигуна</a>
Спосіб визначення пускового моменту електродвигуна
Номер патенту: 21636
Опубліковано: 06.01.1998
Автори: Лещенко Анатолій Володимирович, Кухарчук Василь Васильович, Кучерук Володимир Юрійович, Кулаков Павло Ігоревич, Поджаренко Володимир Олександрович
МПК: G01L 3/10
Мітки: електродвигуна, моменту, пускового, спосіб, визначення
Формула / Реферат:
Способ определения пускового момента электродвигателя путем регистрации текущего значения крутящего момента Мc на роторе включенного испытуемого электродвигателя, вращаемого с заданной скоростью внешним приводом, где одновременно с вращением ротора регистрируют текущий угол его поворота, причем до подачи питания на испытуемый электродвигатель в течение одного оборота регистрируют текущее значение действующего на ротор крутящего момента Mс,...
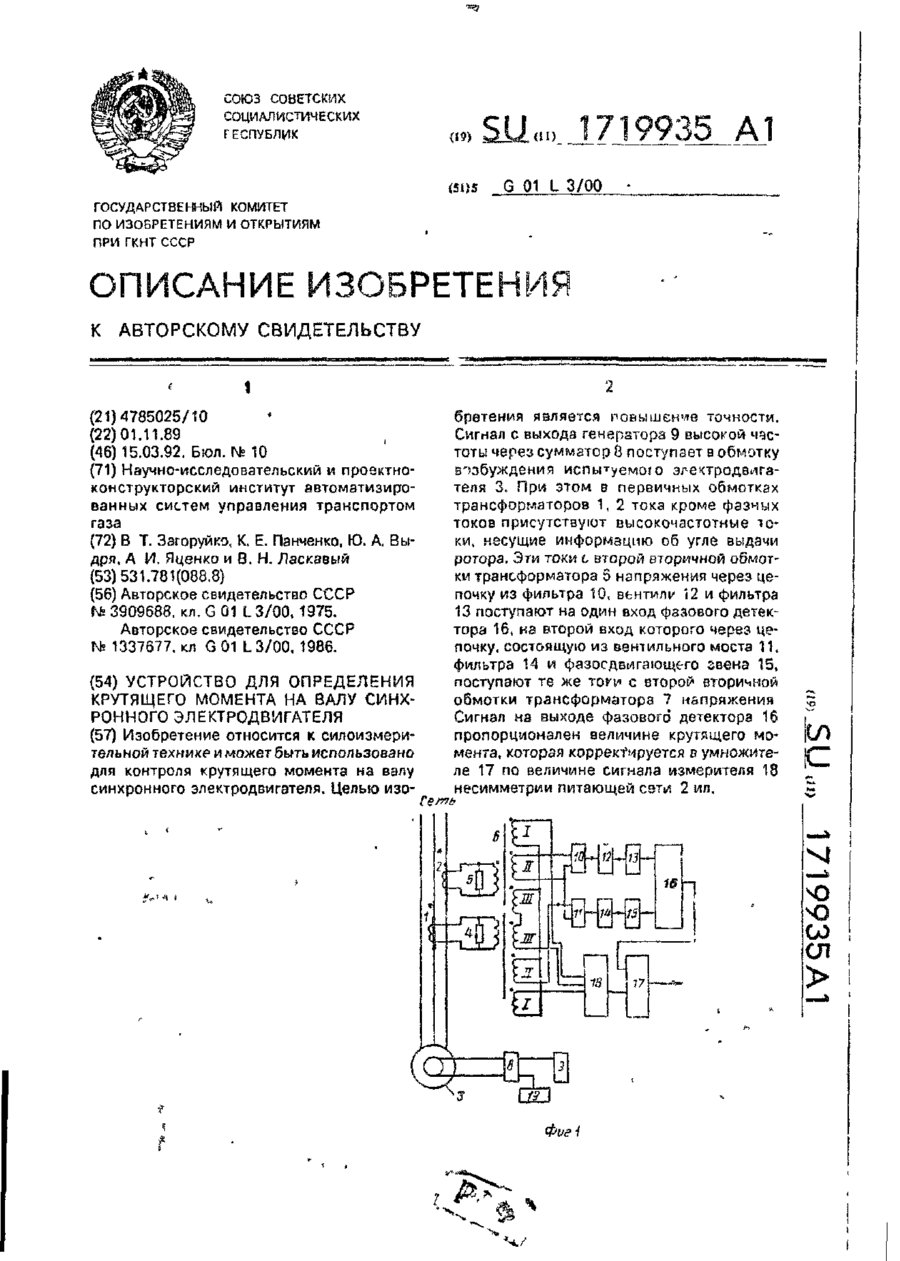
Пристрій для визначення моменту кручення на валу синхронного електродвигуна
Номер патенту: 16803
Опубліковано: 29.08.1997
Автори: Яценко Олексій Іванович, Панченко Костянтин Євгенович, Загоруйко Валерій Тимофійович, Ласкавий Віктор Миколайович, Видря Юрій Олександрович
МПК: G01L 3/10
Мітки: пристрій, синхронного, електродвигуна, валу, кручення, моменту, визначення
Формула / Реферат:
Устройство для определения крутящего момента на валу синхронного электродвигателя, содержащее фазовый детектор и датчик тока, отличающееся тем, что, с целью повышения точности, в него введены два трансформатора напряжения, три фильтра, фазосдвигающее звено, блок умножения, блок измерения коэффициента несимметрии сети, вентиль, вентильный мост и второй датчик тока, причем оба датчика тока выполнены в виде трансформаторов тока, вторичные...
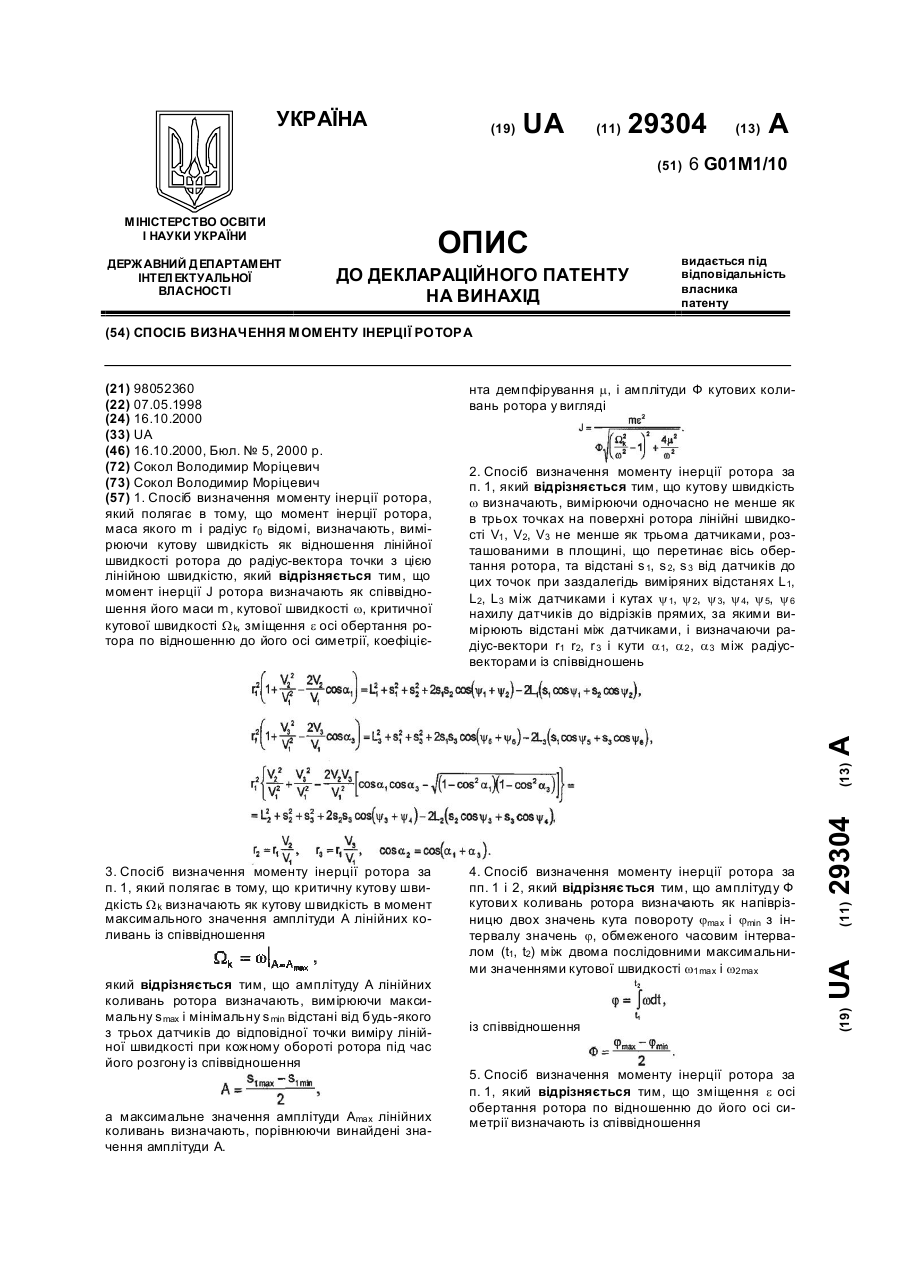
Спосіб визначення моменту інерції ротора
Номер патенту: 29304
Опубліковано: 16.10.2000
Автор: Сокол Володимир Моріцевич
МПК: G01M 1/10
Мітки: визначення, інерції, моменту, спосіб, ротора
Формула / Реферат:
1. Спосіб визначення моменту інерції ротора, який полягає в тому, що момент інерції ротора, маса якого m і радіус r0 відомі, визначають, вимірюючи кутову швидкість як відношення лінійної швидкості ротора до радіус-вектора точки з цією лінійною швидкістю, який відрізняється тим, що момент інерції J ротора визначають як співвідношення його маси m, кутової швидкості, критичної...
Спосіб визначення моменту відкриття клапана
Номер патенту: 353
Опубліковано: 30.04.1993
Автори: Волинський Михайло Михайлович, Квашин Михайло Федорович, Бонеско Володимир Олександрович
МПК: F01D 17/00
Мітки: визначення, відкриття, спосіб, клапана, моменту
Формула / Реферат:
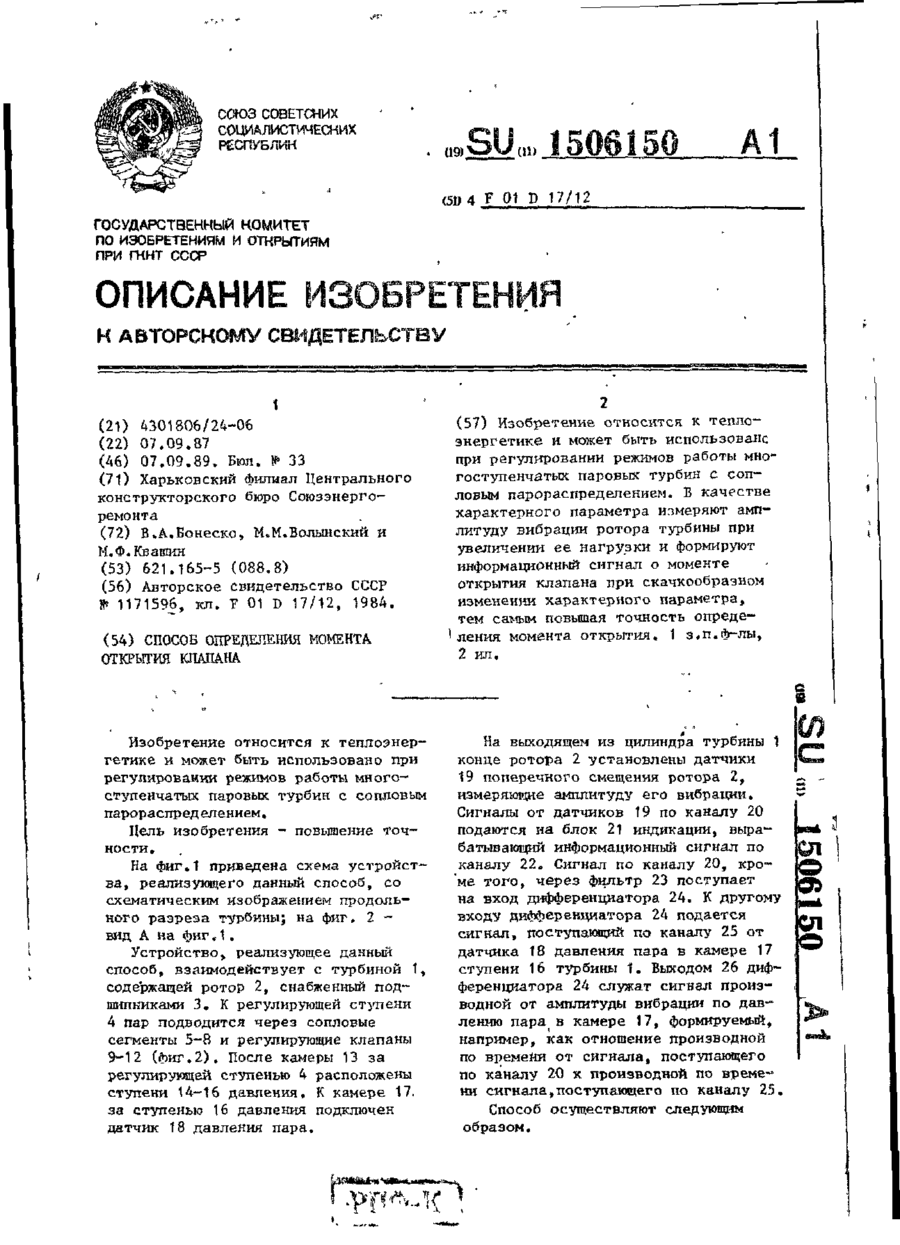
1. Способ определения момента открытия клапана многоступенчатой паровой турбины с сопловым парораспределением путем измерения характерного параметра и формирования информационного сигнала о моменте открытия клапана по изменению характерного параметра, отличающийся тем, что, с целью повышения точности, измеряют амплитуду вибрации ротора турбины при увеличении ее нагрузки, используют результаты измерения в качестве характерного параметра, а...
Пружна муфта для передачі обертального моменту від електродвигуна на віброзбуджувач технологічної вібромашини
Номер патенту: 18087
Опубліковано: 17.06.1997
Автори: Солов`ян Сергій Дмитрович, Бахмудов Курбан Алісултанович, Олехнович Казимир Олександрович
МПК: F16D 43/00
Мітки: вібромашини, передачі, технологічної, електродвигуна, обертального, пружна, муфта, віброзбуджувач, моменту
Формула / Реферат:
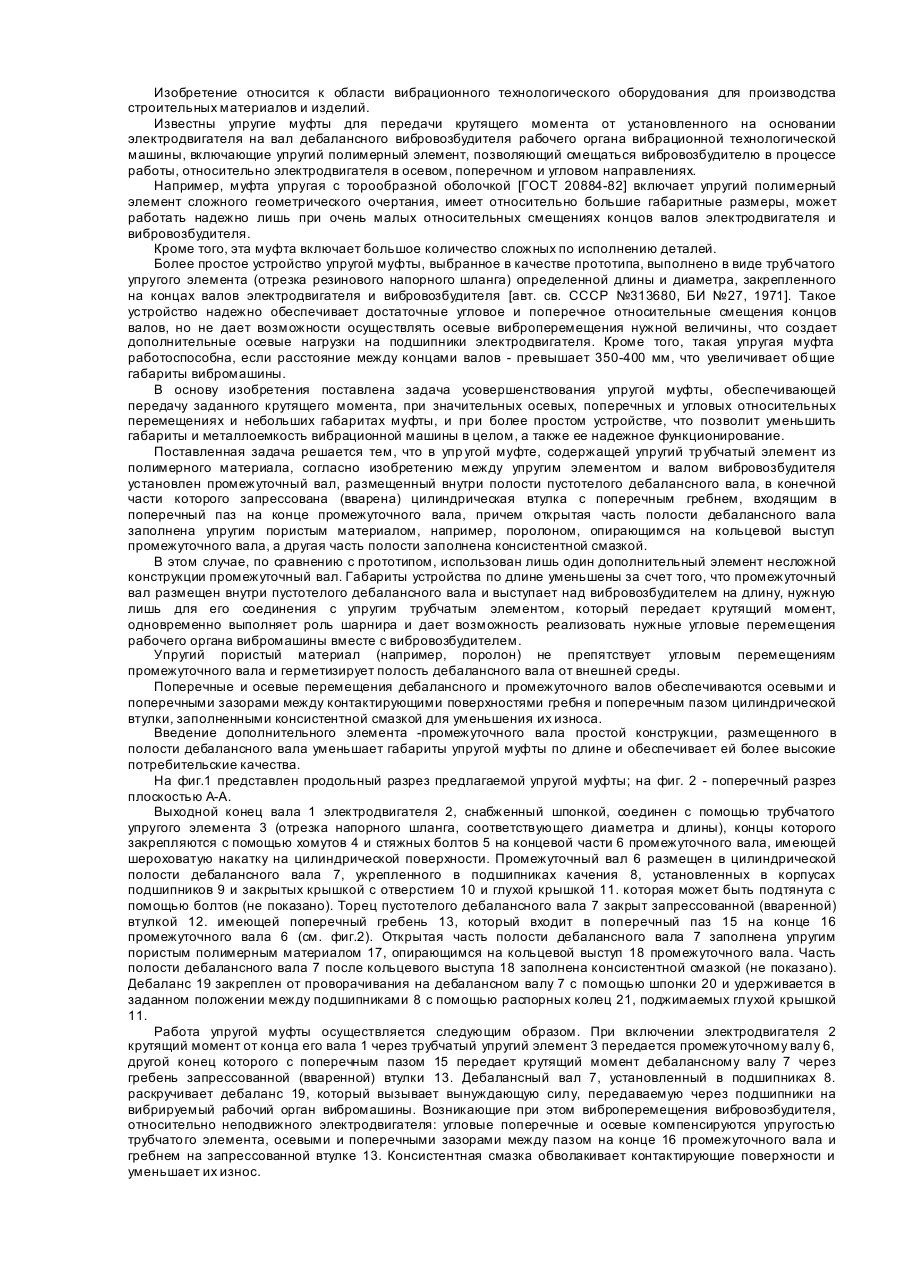
Упругая муфта для передачи крутящего момента от электродвигателя на вибровозбудитель технологической вибромашины, включающая упругий трубчатый элемент из полимерного материала, отличающаяся тем, что между упругим элементом и валом вибровозбудителя дополнительно установлен промежуточный вал, размещенный внутри полости пустотелого дебалансного вала, в конечной части которой запрессована цилиндрическая втулка с поперечным гребнем, входящим в...
Попередній патент: Спосіб отримання сухої біомаси женьшеня
Наступний патент: Мастило для форм
Випадковий патент: Засіб для лікування десинхронізаційних порушень та фармацевтична композиція