Спосіб визначення моменту інерції ротора


Формула / Реферат
1. Спосіб визначення моменту інерції ротора, який полягає в тому, що момент інерції ротора, маса якого m і радіус r0 відомі, визначають, вимірюючи кутову швидкість як відношення лінійної швидкості ротора до радіус-вектора точки з цією лінійною швидкістю, який відрізняється тим, що момент інерції J ротора визначають як співвідношення його маси m, кутової швидкості![]() , критичної кутової швидкості
, критичної кутової швидкості ![]() зміщення
зміщення ![]() осі обертання ротора по відношенню до його осі симетрії, коефіцієнта демпфірування
осі обертання ротора по відношенню до його осі симетрії, коефіцієнта демпфірування ![]() , і амплітуди Ф кутових коливань ротора у вигляді
, і амплітуди Ф кутових коливань ротора у вигляді
2. Спосіб визначення моменту інерції ротора за п. 1, який відрізняється тим, що кутову швидкість о визначають, вимірюючи одночасно не менше як в трьох точках на поверхні ротора лінійні швидкості V1, V2, V3 не менше як трьома датчиками, розташованими в площині, що перетинає вісь обертання ротора, та відстані S1, S2, S3 від датчиків до цих точок при заздалегідь виміряних відстанях L1, L2, L3 між датчиками і кутах ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() нахилу датчиків до відрізків прямих, за якими вимірюють відстані між датчиками, і визначаючи радіус-вектори r1, r2, r3 і кути
нахилу датчиків до відрізків прямих, за якими вимірюють відстані між датчиками, і визначаючи радіус-вектори r1, r2, r3 і кути ![]() ,
, ![]() ,
, ![]() між радіус-векторами із співвідношень
між радіус-векторами із співвідношень



![]()
![]()
![]()
3. Спосіб визначення моменту інерції ротора за п. 1, який полягає в тому, що критичну кутову швидкість ![]() визначають як кутову швидкість в момент максимального значення амплітуди А лінійних коливань із співвідношення
визначають як кутову швидкість в момент максимального значення амплітуди А лінійних коливань із співвідношення
![]()
який відрізняється тим, що амплітуду А лінійних коливань ротора визначають, вимірюючи максимальну Smax і мінімальну Smin відстані від будь-якого з трьох датчиків до відповідної точки виміру лінійної швидкості при кожному обороті ротора під час його розгону із співвідношення
![]()
а максимальне значення амплітуди Аmax лінійних коливань визначають, порівнюючи винайдені значення амплітуди А.
4. Спосіб визначення моменту інерції ротора за пп. 1 і 2, який відрізняється тим, що амплітуду Ф кутових коливань ротора визначають як напіврізницю двох значень кута повороту ![]() і
і ![]() з інтервалу значень
з інтервалу значень ![]() , обмеженого часовим інтервалом (t1, t2) між двома послідовними максимальними значеннями кутової швидкості
, обмеженого часовим інтервалом (t1, t2) між двома послідовними максимальними значеннями кутової швидкості ![]() і
і ![]()

із співвідношення
![]()
5. Спосіб визначення моменту інерції ротора за п. 1, який відрізняється тим, що зміщення є осі обертання ротора по відношенню до його осі симетрії визначають із співвідношення

а кут ![]() нахилу вектора зміщення є по відношенню до радіуса ротора r0, проведеного з осі симетрії ротора до точки виміру лінійної швидкості, визначають із співвідношення
нахилу вектора зміщення є по відношенню до радіуса ротора r0, проведеного з осі симетрії ротора до точки виміру лінійної швидкості, визначають із співвідношення
6. Спосіб визначення моменту інерції ротора за пп. 1 і 3, який відрізняється тим, що коефіцієнт демпфірування ![]() коливань ротора визначають із співвідношення
коливань ротора визначають із співвідношення
Текст
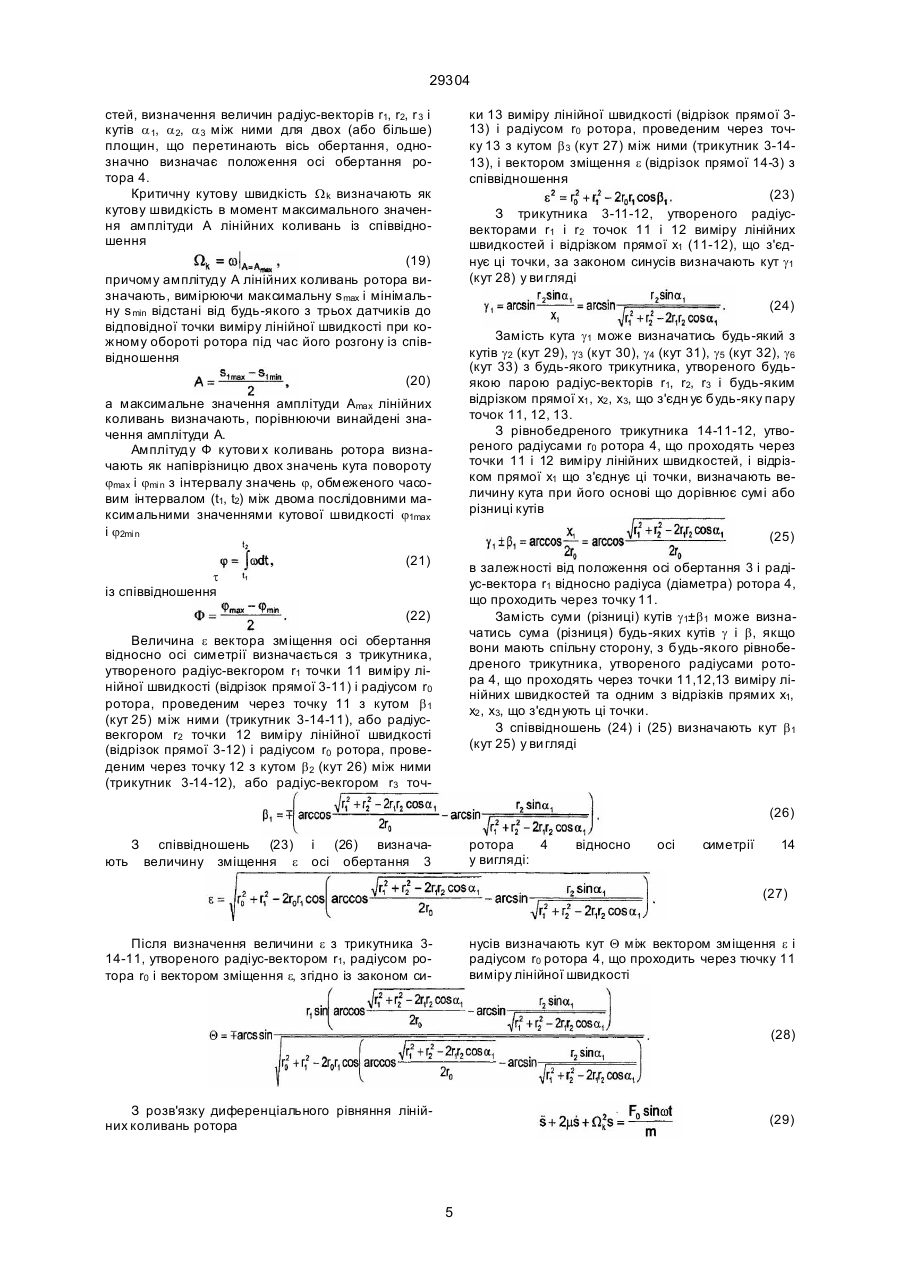
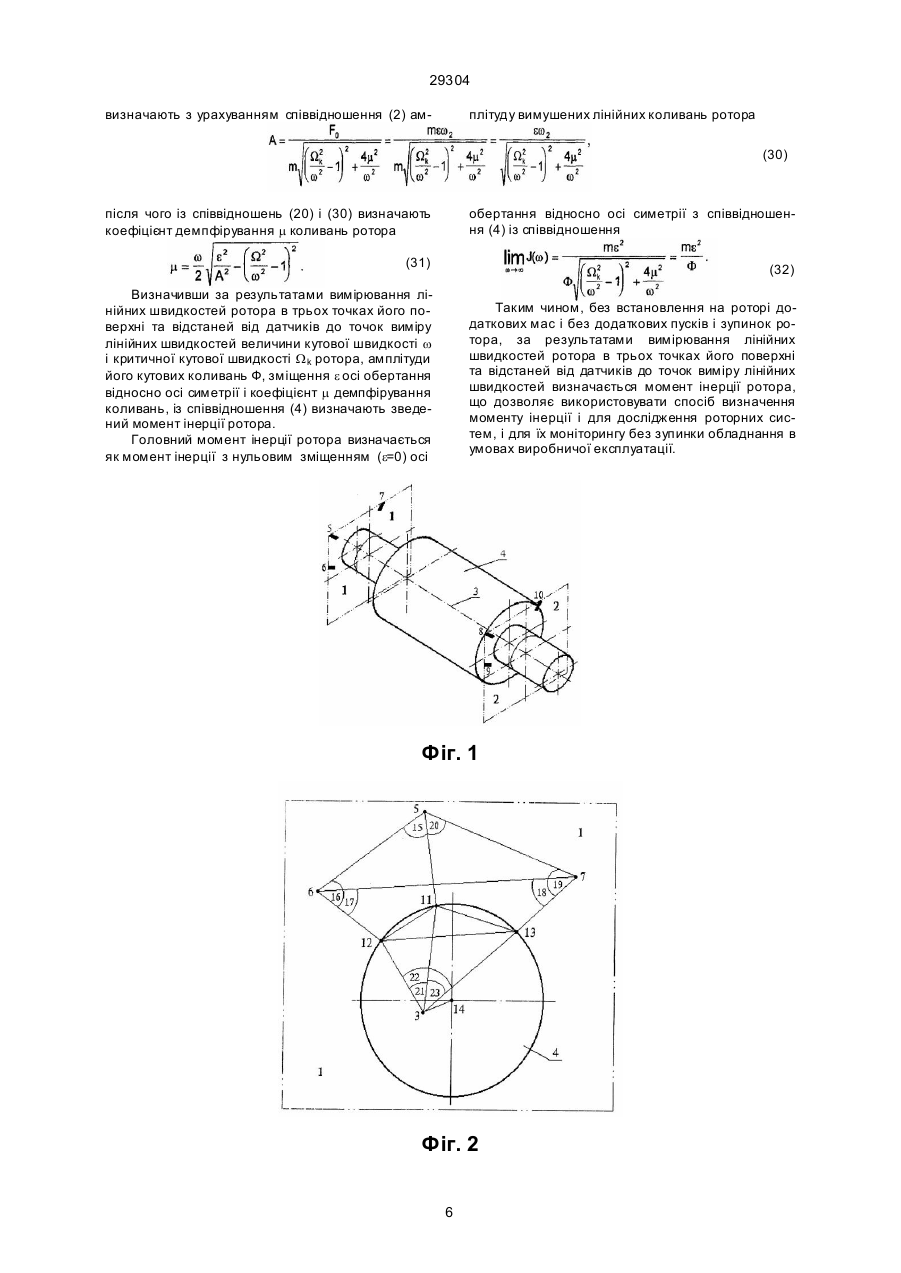
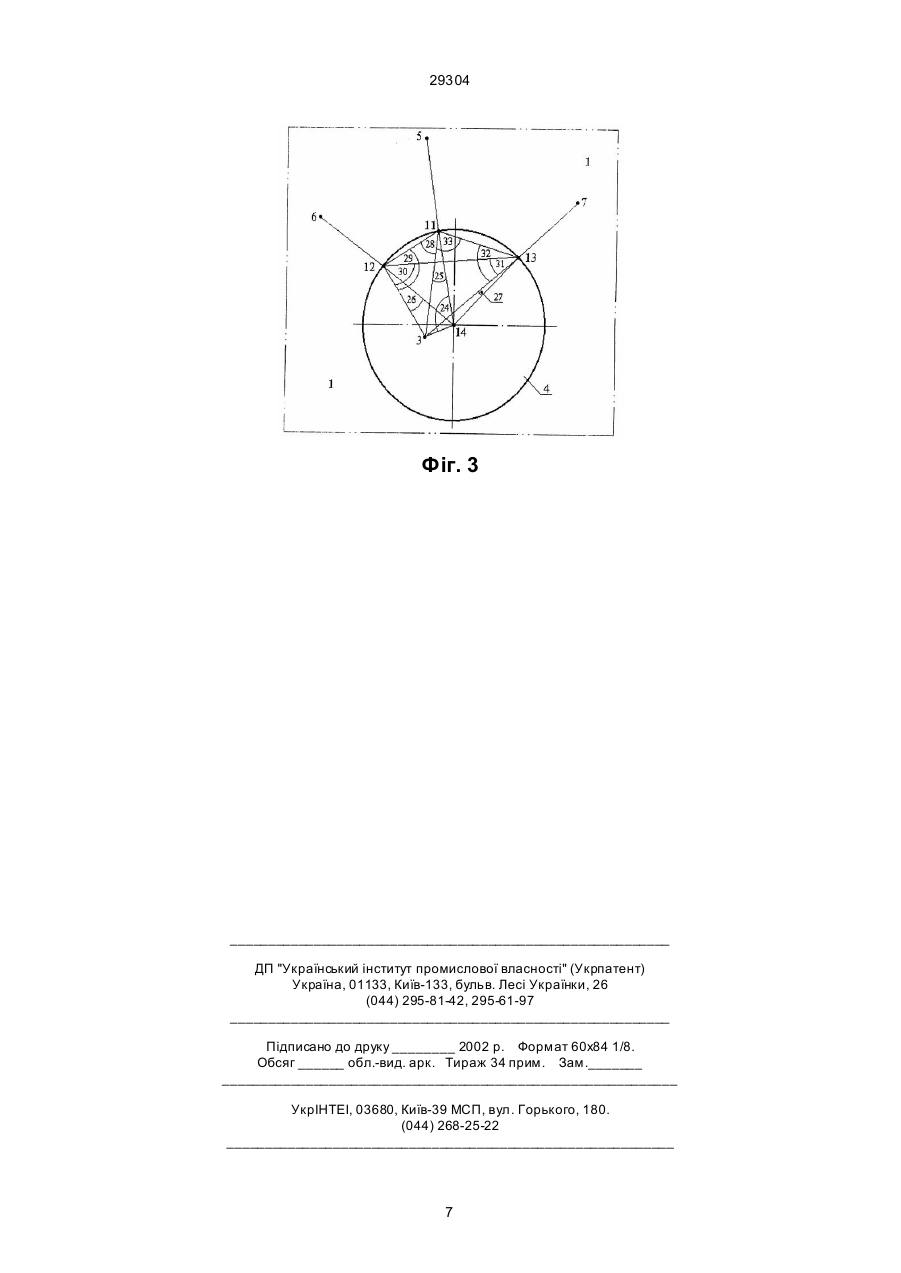
1. Спосіб визначення моменту інерції ротора, який полягає в тому, що момент інерції ротора, маса якого m і радіус r0 відомі, визначають, вимірюючи кутову швидкість як відношення лінійної швидкості ротора до радіус-вектора точки з цією лінійною швидкістю, який відрізняється тим, що момент інерції J ротора визначають як співвідношення його маси m, кутової швидкості w, критичної кутової швидкості W k, зміщення e осі обертання ротора по відношенню до його осі симетрії, коефіціє нта демпфірування m, і амплітуди Ф кутових коливань ротора у вигляді 3. Спосіб визначення моменту інерції ротора за п. 1, який полягає в тому, що критичну кутову швидкість W k визначають як кутову швидкість в момент максимального значення амплітуди А лінійних коливань із співвідношення 4. Спосіб визначення моменту інерції ротора за пп. 1 і 2, який відрізняє ться тим, що амплітуду Ф кутови х коливань ротора визначають як напіврізницю двох значень кута повороту jmах і jmin з інтервалу значень j, обмеженого часовим інтервалом (t1, t2) між двома послідовними максимальними значеннями кутової швидкості w1max і w2max а максимальне значення амплітуди Аmах лінійних коливань визначають, порівнюючи винайдені значення амплітуди А. із співвідношення 5. Спосіб визначення моменту інерції ротора за п. 1, який відрізняється тим, що зміщення e осі обертання ротора по відношенню до його осі симетрії визначають із співвідношення (11) UA (19) який відрізняється тим, що амплітуду А лінійних коливань ротора визначають, вимірюючи максимальну s max і мінімальну s min відстані від будь-якого з трьох датчиків до відповідної точки виміру лінійної швидкості при кожному обороті ротора під час його розгону із співвідношення 29304 (13) A 2. Спосіб визначення моменту інерції ротора за п. 1, який відрізняється тим, що кутову швидкість w визначають, вимірюючи одночасно не менше як в трьох точках на поверхні ротора лінійні швидкості V1 , V2, V3 не менше як трьома датчиками, розташованими в площині, що перетинає вісь обертання ротора, та відстані s 1, s 2, s 3 від датчиків до цих точок при заздалегідь виміряних відстанях L 1, L2, L3 між датчиками і кутах y 1, y 2, y 3, y 4, y 5, y 6 нахилу датчиків до відрізків прямих, за якими вимірюють відстані між датчиками, і визначаючи радіус-вектори r1 r2, r 3 і кути a 1, a 2 , a 3 між радіусвекторами із співвідношень 29304 а кут Q нахилу вектора зміщення e по відношенню до радіуса ротора r0, проведеного з осі симетрії ротора до точки виміру лінійної швидкості, визначають із співвідношення 6. Спосіб визначення моменту інерції ротора за пп. 1 і 3, який відрізняється тим, що коефіцієнт демпфірування m коливань ротора визначають із співвідношення Винахід відноситься до вимірювальної техніки і може використовуватись в системах визначення моменту інерції обертових об'єктів. Відомій спосіб визначення моменту інерції, який полягає в тому, що на вал ротора електричної машини встановлюють послідовно перше і друге зразкові тіла обертання, моменти інерції яких заздалегідь відомі, реєструють кутову швидкість під час розгону і під час самогальмування ротора, з'єднаного спочатку з першим, а потім з другим зразковим тілом, після чого з порівняння чотирьох процесів зміни кутової швидкості визначають момент інерції ротора (Поджаренко В.О., Кучерук В.Ю. Інформаційно-вимірювальна система механічних характеристик електричних машин // Материалы Первых международных академических чтений "Новые технологии, материалы, оборудование" 21-23 ноября 1995. – Киев: Украинская технологическая академия. - Донецк: 1996. С. 85-91). Недоліком відомого способу є складність визначення моменту інерції, обумовлена необхідністю встановлення на вал ротора спочатку першого, а потім другого зразкових тіл обертання з заздалегідь виміряними моментами інерції, а також двократними пуском (розгоном) і зупинкою (з самогальмуванням) електричної машини, що робить цей спосіб непридатним для моніторингу діючого обладнання. В основу винаходу поставлено задачу створення способу визначення моменту інерції ротора, в якому шляхом виключення необхідності встановлення на вал ротора зразкових тіл з заздалегідь визначеними моментами інерції, а також виключення необхідності повторних пусків і зупинок, спрощується визначення моменту інерції. Поставлена задача вирішується тим, що момент інерції J ротора визначають як співвідношення його маси m, кутової швидкості w, критичної кутової швидкості W k, зміщення e осі обертання ротора по відношенню до його осі симетрії, коефіцієнта демпфірування m і амплітуди Ф кутови х коливань ротора у вигляді критичну кутову швидкість W k визначають як кутову швидкість в момент максимального значення амплітуди А лінійних коливань із співвідношення причому амплітуду А лінійних коливань ротора визначають, вимірюючи максимальну s max і мінімальну s min відстані від будь-якого з трьох датчиків до відповідної точки виміру лінійної швидкості при ко кутову швидкість w визначають, вимірюючи одночасно лінійні швидкості V1, V2, V3 в трьох точках трьома датчиками, розташованими в площині, що перетинає вісь обертання ротора, та відстані s 1 s 2, s 3 від датчиків до цих точок при заздалегідь виміряних відстанях L1, L2, L3 між датчиками і кутах y 1, y 2, y 3, y 4, y 5, y 6 нахилу датчиків до відрізків прямих, за якими вимірюють відстані між датчиками, і визначаючи радіус-вектори r1, r2, r3 і кути a 1, a 2, a 3 між радіус-векторами із співвідношень 2 29304 жному обороті ротора під час його розгону із співвідношення послідовними максимальними значеннями кутової швидкості ω1max і ω2max а максимальне значення амплітуди Аmах лінійних коливань визначають, порівнюючи винайдені значення амплітуди А, амплітуду Ф кутови х коливань ротора визначають як напіврізницю двох значень кута повороту jmах і jmіn з інтервалу значень j, обмеженого часовим інтервалом (t1, t2) між двома із співвідношення а кут Q нахилу вектора зміщення e по відношенню до радіуса ротора r0, проведеного з осі симетрії ротора до точки виміру лінійної швидкості, визначають із співвідношення коефіцієнт демпфірування m коливань ротора визначають із співвідношення відстань від осі обертання 3 ротора 4 до цієї точки (відрізок прямої 3-12); радіус-вектор точки 13 визначений як відстань від осі обертання 3 ротора 4 до цієї точки (відрізок прямої 3-13). Кут 21 між радіус-векторами точок 11 і 12 визначений кутом між відрізками прямих 3-11 і 3-12; кут 22 між радіусвекторами точок 12 і 13 визначений кутом між відрізками прямих 3-12 і 3-13; кут 23 між радіусвекторами точок 13 і 11 визначений кутом між відрізками прямих 3-13 і 3-11. На фіг. 3 показано взаємне розташування радіус-векторів точок виміру лінійних швидкостей, радіусів ротора 4, проведених в ці точки, і вектора зміщення осі обертання 3. Кут 24 між вектором зміщення і радіусом ротора, проведеним з осі симетрії в точку 11 виміру лінійної швидкості, визначається кутом між відповідним радіусом та відрізком прямої 14-3. Кут 25 між радіус-вектором точки 11 виміру лінійної швидкості і радіусом ротора, проведеним в цю точку, визначається кутом між цим радіусом і відрізком прямої 11-3. Кут 26 між радіус-вектором точки 12 виміру лінійної швидкості і радіусом ротора, проведеним в цю точку, визначається кутом між цим радіусом і відрізком прямої 12-3. Кут 27 між радіус-вектором точки 13 виміру лінійної швидкості і радіусом ротора, проведеним в цю точку, визначається кутом між цим радіусом і відрізком прямої 13-3. Кут 28 між радіусвектором точки 11 виміру лінійної швидкості та прямою, що з'єднує цю точку з аналогічною точкою 12, визначений кутом між відрізками прямих 311 і 11-12. Кут 29 між радіус-вектором точки 12 виміру лінійної швидкості та прямою, що з'єднує цю точку з аналогічною точкою 11, визначений кутом між відрізками прямих 3-12 і 11-12. Кут 30 між радіус-вектором точки 12 виміру лінійної швидкості та прямою, що з'єднує цю точку з аналогічною точкою 13, визначений кутом між відрізками прямих 312 і 12-13. Кут 31 між радіус-вектором точки 13 виміру лінійної швидкості та прямою, що з'єднує цю точку з аналогічною точкою 12, визначений кутом між відрізками прямих 3-13 і 12-13. Кут 32 між радіус-вектором точки 13 виміру лінійної швидкості та прямою, що з'єднує цю точку з аналогічною точкою 11, визначений кутом між відрізками прямих 3 зміщення e осі обертання ротора по відношенню до його осі симетрії визначають із співвідношення Суть винаходу пояснюється кресленнями. На фіг. 1 показано площини 1 і 2, які перетинають вісь обертання З ротора 4. В площині 1 розташовані датчики 5, 6 і 7, а в площині 2 – датчики 8, 9 і 10, які вимірюють лінійні швидкості в точках на поверхні ротора 4 і відстані від датчиків до цих точок. Розташування елементів в площині 1 показане на фіг. 2 (розташування елементів в площині 2 ідентичне і тому на кресленнях не показане). Датчик 5, який вимірює лінійну швидкість в точці 11 ротора 4, розташовано від цієї точки на відстані, що визначається відрізком прямої 5-11. Датчик 6, який вимірює лінійну швидкість в точці 12 ротора 4, розташовано від цієї точки на відстані, що визначається відрізком прямої 6-12. Датчик 7, який вимірює лінійну швидкість в точці 13 ротора 4, розташовано від цієї точки на відстані, що визначається відрізком прямої 7-13. Зміщення осі обертання 3 ротора 4 по відношенню до його осі симетрії 14 визначається відрізком прямої 14-3. Кут 15 нахилу датчика 5 до відрізка прямої між датчиками 5 і 6 визначений кутом між відрізками прямих 5-11 і 5-6. Кут 16 нахилу датчика 6 до відрізка прямої між датчиками 5 і 6 визначений кутом між відрізками прямих 6-12 і 5-6. Кут 17 нахилу датчика 6 до відрізка прямої між датчиками 6 і 7 визначений кутом між відрізками прямих 6-12 і 6-7. Кут 18 нахилу датчика 7 до відрізка прямої між датчиками 6 і 7 визначений кутом між відрізками прямих 7-13 і 6-7. Кут 19 нахилу датчика 7 до відрізка прямої між датчиками 6 і 7 визначений кутом між відрізками прямих 7-13 і 6-7. Кут 20 нахилу датчика 5 до відрізка прямої між датчиками 5 і 7 визначений кутом між відрізками прямих 5-11 і 5-7. Радіус-вектори точок виміру лінійної швидкості на поверхні ротора 4 визначені таким чином: радіус-вектор точки 11 визначений як відстань від осі обертання 3 ротора 4 до цієї точки (відрізок прямої 3-11); радіус-вектор точки 12 визначений як 3 29304 13 і 11-13. Кут 33 між радіус-вектором точки 11 виміру лінійної швидкості та прямою, що з'єднує цю точку з аналогічною точкою 13, визначений кутом між відрізками прямих 3-11 і 11-13. Спосіб визначення положення осі обертання ротора здійснюється таким чином. З розв'язку диференційного рівняння обертового руху ротора V1 в точці 11, відстань S2 між датчиком 6 і точкою 12 ротора 4 (відрізок прямої 6-12) та лінійну швидкість V2 в точці 12, а також відстань s 3 між датчиком 7 і точкою 13 ротора 4 (відрізок прямої 713) та лінійну швидкість V3 в точці 13. Кожен комплект з трьох датчиків (в кожній площині) жорстко закріплений в несучому елементі (на кресленнях не показано), тому відстані L1 між датчиками 5 і 6 (відрізок прямої 5-6), L2 між датчиками 6 і 7 (відрізок прямої 6-7) та L3 між датчиками 7 і 5 (відрізок прямої 7-5), а також кути нахилу датчиків 5, 6 і 7 до відрізків прямих, що з'єдн ують датчики - кути y 1 (кут 15), y 2 (к ут 16), y 3 (кут 17), y 4 (к ут 18), y 5 (кут 19) і y 6 (кут 20) - вимірюються заздалегідь, відомі та постійні для даного комплекту датчиків. Датчики 5, 6, 7 (або 8, 9, 10) можуть бути ультразвуковими, термічними, радіолокаційними, оптичними, такими, що використовують взаємно кореляційну функцію, або будь-якого іншого типу, який забезпечує вимірювання відстаней між датчиком і поверхнею ротора та лінійних швидкостей у відповідних точках поверхні ротора. Після вимірювання відстаней s 1 s 2, s 3 між датчиками 5, 6, 7 і точками 11, 12, 13 на поверхні ротора 4, відповідно, з чотирикутників 6-5-11-12, 7-612-13 і 5-7-13-11 визначають відстані х1 , х2, х3 між точками 11 і 12, 12 і 13,13 і 11, відповідно, із співвідношень: (1) в якому момент сили М визначений змушуючою силою F з амплітудою F 0: (2) визначають амплітуду кутови х змушених коливань ротора (3) з якої визначають зведений момент інерції ротора (4) Для визначення кутової швидкості ротора в площинах 1 і 2, що перетинають вісь обертання 3 ротора 4, розташовують по три датчики (4, 5, і 6 в площині 1 та 7, 8 і 9 в площині 2, фіг. 1) які вимірюють відстань s 1 між датчиком 5 і точкою 11 ротора 4 (відрізок прямої 5-11) та лінійну швидкість (5) (6) (7) З трикутника 3-11-12, утвореного радіусвекторами r1 точки 11 (відрізок прямої 3-11), r2 точки 12 (відрізок прямої 3-12) з кутом a 1 (кут 21) між ними та відрізком прямої х1 визначають відстань x2 із співвідношення. (8) з трикутника 3-12-13, утвореного радіус-векторами r2 точки 12, r3 точки 13 (відрізок прямої 3-13) з кутом a 2 (кут 22) між ними та відрізком прямої х2, визначають відстань х2 із співвідношення (9) з трикутника 3-13-11, утвореного радіус-векторами r3 точки 13, r1 точки 11 з кутом a 3 (кут 23) між ними та відрізком прямої х3, визначають відстань х3 із співвідношення (10) За результатами вимірювання лінійних швидкостей V1, V2, V3 точок 11, 12, 13 ротора 4 з ураху ванням сталості для всіх його точок миттєвого значення кутової швидкості (11) визначають величини радіус-векторів r2, r3 із співвідношень (12) (13) Оскільки з розташування радіус-векторів r1, r2 , r3 витікає, що кут (14) з (10) визначають (15) З рівнянь (5)-(15) визначають співвідношення (16) (17) (18) а з системи рівнянь (12), (13), (15), (16), (17), (18) визначають радіус-вектори r1, r2, r3 і кути a 1 (cos a 1), a 2 (cosa a 2), a 3 (cos a 3) між ними. Оскільки початок кожного з радіус-векторів r1, r 2, r 3 лежить на осі обертання ротора 4, а кінці припадають на відповідні точки 11, 12, 13 виміру лінійних швидко 4 29304 стей, визначення величин радіус-векторів r1, r2, r 3 і кутів a 1, a 2, a 3 між ними для двох (або більше) площин, що перетинають вісь обертання, однозначно визначає положення осі обертання ротора 4. Критичну кутову швидкість W k визначають як кутову швидкість в момент максимального значення амплітуди А лінійних коливань із співвідношення (19) причому амплітуду А лінійних коливань ротора визначають, вимірюючи максимальну s max і мінімальну s min відстані від будь-якого з трьох датчиків до відповідної точки виміру лінійної швидкості при кожному обороті ротора під час його розгону із співвідношення ки 13 виміру лінійної швидкості (відрізок прямої 313) і радіусом r0 ротора, проведеним через точку 13 з кутом b 3 (кут 27) між ними (трикутник 3-1413), і вектором зміщення e (відрізок прямої 14-3) з співвідношення (23) З трикутника 3-11-12, утвореного радіусвекторами r1 і r2 точок 11 і 12 виміру лінійних швидкостей і відрізком прямої х1 (11-12), що з'єднує ці точки, за законом синусів визначають кут g1 (кут 28) у ви гляді (24) Замість кута g1 може визначатись будь-який з кутів g2 (кут 29), g3 (кут 30), g4 (кут 31), g5 (кут 32), g6 (кут 33) з будь-якого трикутника, утвореного будьякою парою радіус-векторів r1, r2, r3 і будь-яким відрізком прямої х1 , x2 , x3, що з'єдн ує будь-яку пару точок 11, 12, 13. З рівнобедреного трикутника 14-11-12, утвореного радіусами r0 ротора 4, що проходять через точки 11 і 12 виміру лінійних швидкостей, і відрізком прямої х1 що з'єднує ці точки, визначають величину кута при його основі що дорівнює сумі або різниці кутів (20) а максимальне значення амплітуди Аmах лінійних коливань визначають, порівнюючи винайдені значення амплітуди А. Амплітуду Ф кутови х коливань ротора визначають як напіврізницю двох значень кута повороту jmах і jmi n з інтервалу значень j, обмеженого часовим інтервалом (t1, t2) між двома послідовними максимальними значеннями кутової швидкості j1mах і j2mi n t із співвідношення (25) (21) в залежності від положення осі обертання 3 і радіус-вектора r1 відносно радіуса (діаметра) ротора 4, що проходить через точку 11. Замість суми (різниці) кутів g1±b 1 може визначатись сума (різниця) будь-яких кутів g і b, якщо вони мають спільну сторону, з будь-якого рівнобедреного трикутника, утвореного радіусами ротора 4, що проходять через точки 11,12,13 виміру лінійних швидкостей та одним з відрізків прямих х1, х2 , х3, що з'єдн ують ці точки. З співвідношень (24) і (25) визначають кут b 1 (кут 25) у ви гляді (22) Величина e вектора зміщення осі обертання відносно осі симетрії визначається з трикутника, утвореного радіус-векгором r1 точки 11 виміру лінійної швидкості (відрізок прямої 3-11) і радіусом r0 ротора, проведеним через точку 11 з кутом b 1 (кут 25) між ними (трикутник 3-14-11), або радіусвекгором r2 точки 12 виміру лінійної швидкості (відрізок прямої 3-12) і радіусом r0 ротора, проведеним через точку 12 з кутом b 2 (кут 26) між ними (трикутник 3-14-12), або радіус-векгором r3 точ (26) З ють співвідношень (23) і (26) визначавеличину зміщення e осі обертання 3 ротора 4 у вигляді: відносно осі симетрії 14 (27) Після визначення величини e з трикутника 314-11, утвореного радіус-вектором r1, радіусом ротора r0 і вектором зміщення e, згідно із законом си нусів визначають кут Q між вектором зміщення e і радіусом r0 ротора 4, що проходить через тючку 11 виміру лінійної швидкості (28) З розв'язку диференціального рівняння лінійних коливань ротора (29) 5 29304 визначають з урахуванням співвідношення (2) ам плітуду вимушених лінійних коливань ротора (30) після чого із співвідношень (20) і (30) визначають коефіцієнт демпфірування m коливань ротора обертання відносно осі симетрії з співвідношення (4) із співвідношення (31) (32) Визначивши за результатами вимірювання лінійних швидкостей ротора в трьох точках його поверхні та відстаней від датчиків до точок виміру лінійних швидкостей величини кутової швидкості w і критичної кутової швидкості W k ротора, амплітуди його кутових коливань Ф, зміщення e осі обертання відносно осі симетрії і коефіцієнт m демпфірування коливань, із співвідношення (4) визначають зведений момент інерції ротора. Головний момент інерції ротора визначається як момент інерції з нульовим зміщенням (e=0) осі Таким чином, без встановлення на роторі додаткових мас і без додаткових пусків і зупинок ротора, за результатами вимірювання лінійних швидкостей ротора в трьох точках його поверхні та відстаней від датчиків до точок виміру лінійних швидкостей визначається момент інерції ротора, що дозволяє використовувати спосіб визначення моменту інерції і для дослідження роторних систем, і для їх моніторингу без зупинки обладнання в умовах виробничої експлуатації. Фіг. 1 Фіг. 2 6 29304 Фіг. 3 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2002 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 34 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 7
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of rotor moment of inertia
Автори англійськоюSokol Volodymyr Moritsevych
Назва патенту російськоюСпособ определения момента инерции ротора
Автори російськоюСокол Владимир Морицевич
МПК / Мітки
МПК: G01M 1/10
Мітки: моменту, спосіб, інерції, ротора, визначення
Код посилання
<a href="https://ua.patents.su/7-29304-sposib-viznachennya-momentu-inerci-rotora.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення моменту інерції ротора</a>
Спосіб визначення положення осі обертання ротора

Номер патенту: 29303
Опубліковано: 16.10.2000
Автор: Сокол Володимир Моріцевич
Мітки: обертання, ротора, спосіб, осі, визначення, положення
Формула / Реферат:
Спосіб визначення положення осі обертання ротора, який полягає в тому, що вимірювання виконують датчиками, розташованими в площинах, які перетинають вісь симетрії ротора, який відрізняється тим, що в кожній площині розташовують не менше як по три датчики, якими вимірюють одночасно лінійні швидкості V1, V2 і V3 в протистоячих датчикам точках на поверхні ротора при одночасному вимірюванні відстаней S1, S2 і S3 від датчиків до цих точок,...
Спосіб визначення моменту інерції тіла складної форми
Номер патенту: 23958
Опубліковано: 31.08.1998
Автори: Гаркуша Павло Миколайович, Богарсуков Сергій Іванович, Горлов Олег Петрович, Карабан Володимир Миколайович, Нечуйвітер Леонід Іванович, Чечельницький Станіслав Борисович
МПК: G01M 1/10
Мітки: спосіб, форми, інерції, тіла, складної, визначення, моменту
Формула / Реферат:
Способ определения момента инерции тела сложной формыс учетом трения при свободных затухающих колебаниях физического и нитяного маятников, включающий вычисление периодов колебаний как для испытуемого тела или изделия, так и для эталона, близкого к телу или изделию по геометрии, на одном и том же маятнике с одними и теми же элементами крепления, отличающийся тем, что маятники отклоняют на угол не менее 8° и при совершении ими свободных...
Спосіб визначення моменту відкриття клапана
Номер патенту: 353
Опубліковано: 30.04.1993
Автори: Квашин Михайло Федорович, Бонеско Володимир Олександрович, Волинський Михайло Михайлович
МПК: F01D 17/00
Мітки: спосіб, клапана, моменту, відкриття, визначення
Формула / Реферат:
1. Способ определения момента открытия клапана многоступенчатой паровой турбины с сопловым парораспределением путем измерения характерного параметра и формирования информационного сигнала о моменте открытия клапана по изменению характерного параметра, отличающийся тем, что, с целью повышения точности, измеряют амплитуду вибрации ротора турбины при увеличении ее нагрузки, используют результаты измерения в качестве характерного параметра, а...
Спосіб визначення пускового моменту електродвигуна
Номер патенту: 21636
Опубліковано: 06.01.1998
Автори: Кулаков Павло Ігоревич, Поджаренко Володимир Олександрович, Кучерук Володимир Юрійович, Кухарчук Василь Васильович, Лещенко Анатолій Володимирович
МПК: G01L 3/10
Мітки: пускового, моменту, електродвигуна, визначення, спосіб
Формула / Реферат:
Способ определения пускового момента электродвигателя путем регистрации текущего значения крутящего момента Мc на роторе включенного испытуемого электродвигателя, вращаемого с заданной скоростью внешним приводом, где одновременно с вращением ротора регистрируют текущий угол его поворота, причем до подачи питания на испытуемый электродвигатель в течение одного оборота регистрируют текущее значение действующего на ротор крутящего момента Mс,...
Спосіб визначення моменту зливання металу з конвертера
Номер патенту: 2970
Опубліковано: 26.12.1994
Автори: Церковницький Микола Сергійович, Богушевський Володимир Святославович, Сорокін Микола Олександрович, Лигоцький Ігор Леонідович
МПК: C21C 5/30
Мітки: металу, конвертера, визначення, моменту, спосіб, зливання
Формула / Реферат:
Способ определения момента слива металла из конвертера, включающий определение содержания углерода и температуры металла в процессе продувки, расчет и формирование управляющих воздействий для получении в момент достижения заданного содержания углерода заданной температуры ванны и прекращение продувки в момент достижения заданного значениясодержания углерода, отличающийся тем, что дополнительно измеряют температуру шлака, находят величину...
Попередній патент: Спосіб визначення положення осі обертання ротора
Наступний патент: Пристрій для вимірювання температури
Випадковий патент: Спосіб блокування неправильних операцій роз'єднувачем