Спосіб реалізації цілевказування
Текст
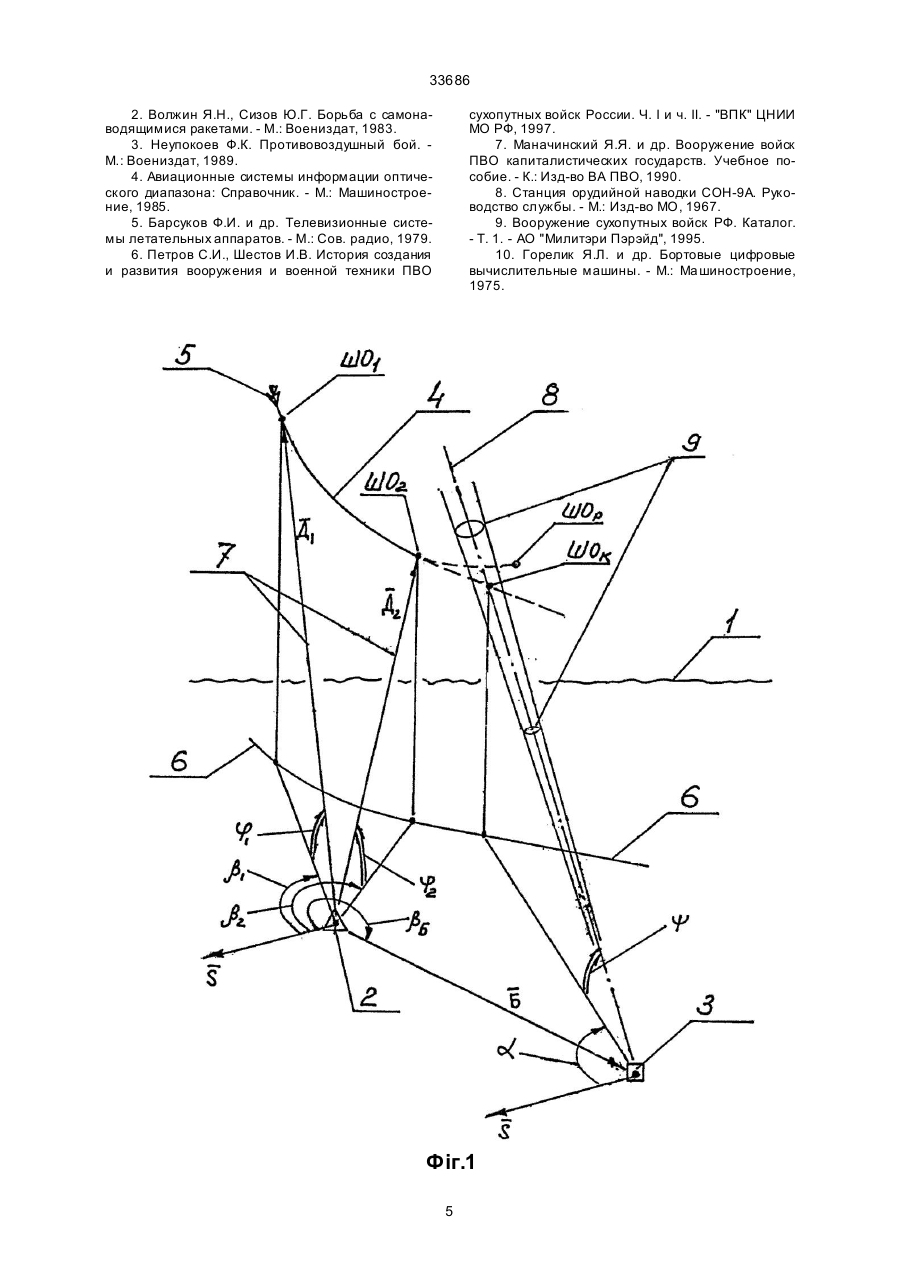
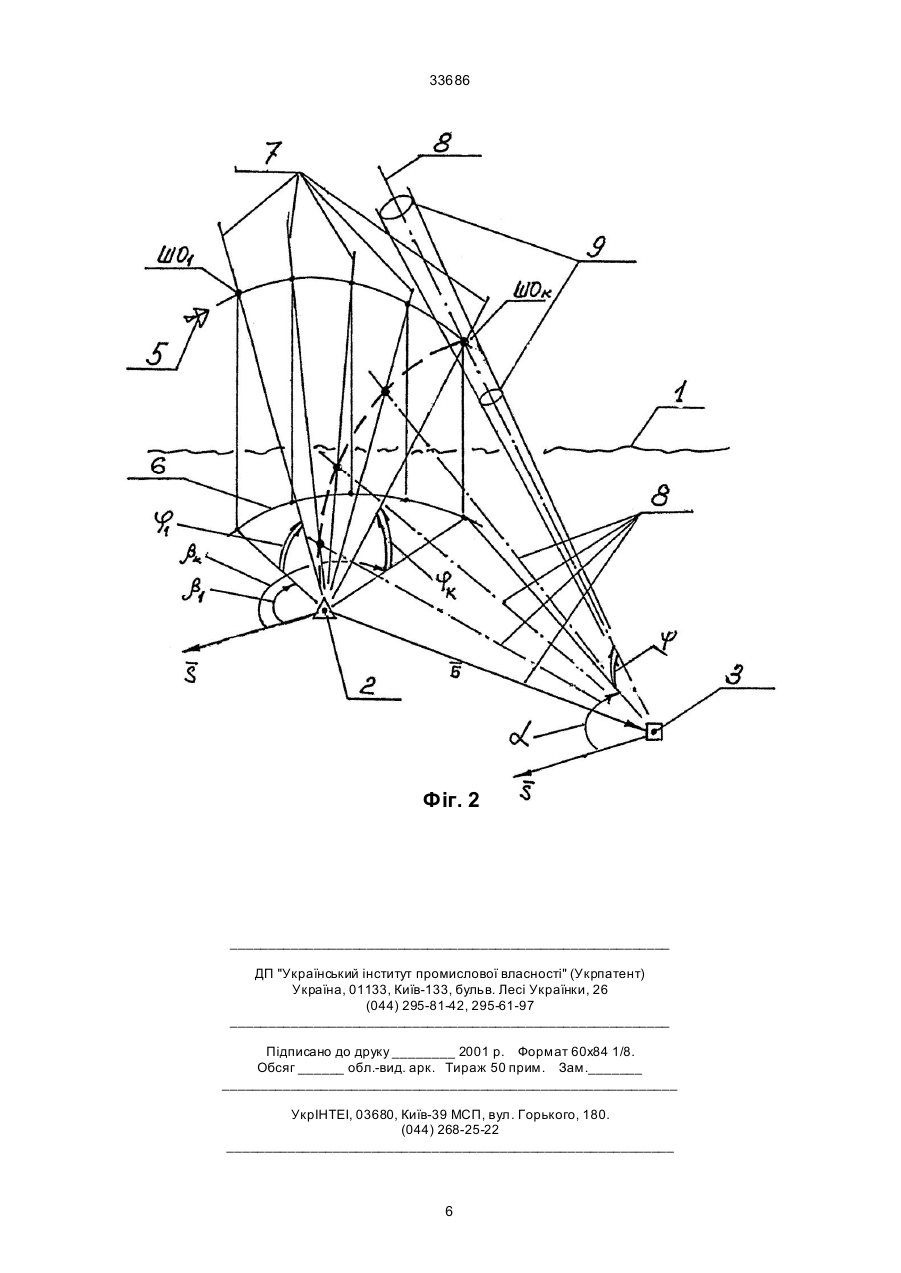
Спосіб реалізації цілєвказування, в процесі якого засобами розвідувально-вимірювального поста виявляють, ідентифікують і супроводжують лінією спостереження об'єкт-ціль, вимірюють в узгодженій системі координат кути просторового положення лінії спостереження, по каналу зв'язку 33686 ня власного контакту з ШО на дистанціях цілевказування. У військовій справі відомий спосіб реалізації цілевказування найбільш наочно може бути проілюстрований на прикладі взаємодії компонентів ППО, зокрема - між розвідувально-вимірювальним (командним) пунктом (в складі якого обов'язково містяться засоби РВП) з засобами "вогневого впливу" на виявлену повітряну ціль, наприклад, із зенітним артилерійським комплексом (ЗАК), що виступає як споживач (приймальна сторона) цілевказування [1, 3, 6, 7]. Місцезнаходження батареї ЗАК і, зокрема, точки розташування батарейної станції гарматного наведення (СГН) [6, 8], куди входить власний батарейний засіб візирування та супроводження (у вигляді, скажімо, радіолокатора чи оптико-електронного приладу), попередньо топографічно прив'язані відносно точки РВП. Для наведення (просторового орієнтування) ЗВС інформацію про виявлений повітряний об'єкт, ідентифікований як ціль, передають з РВП на батарею ЗАК з урахуванням геометричного взаєморозташування РВП і ЗВС у вигляді, наприклад, полярних координат в "земній" системі координат (ЗСК): азимута, кута місця і дальності до цілі. В деяких випадках згадане урахування геометричного взаєморозташування виконують безпосередньо на СГН [8]. Згідно з такою одноразовою чи поточною інформацією апаратуру ЗВС наводять (розвертають) в точку розрахованого місцезнаходження цілі і завдяки цьому встановлюють власними засобами оптичний чи радіолокаційний контакт з нею, тобто спостерігають і візирують ціль за допомогою ЗВС. Відомі способи реалізації цілевказування мають суттєвий недолік, який полягає в тому, що для їх виконання необхідне знання відстані (дальності) від РВП до шуканого об'єкта (ШО), яка на практиці не у всіх ситуаціях може бути належним чином (скажімо, з потрібною точністю) виміряна засобами РВП. Наприклад, при використанні на пошуковому вертольоті радіолокатора в умовах морської поверхні, що хвилюється, вимірювання дальності до аварійного малорозмірного об'єкта виконують з надвеликою похибкою, в той час як кутові координати завдяки, скажімо, наявності рятувального маячка на ШО вимірюють з достатньою точністю. Другий приклад - при здійсненні ППО дуже ймовірна ситуація, коли радіолокаційні засоби РВП (командно-спостережних пунктів) не включають (з міркувань потаємності) або вони подавлені внаслідок радіоелектронної протидії супротивника. В такому випадку на РВП для огляду зони відповідальності і виявлення повітряних об'єктів використовують пасивні засоби розвідки (наприклад, теплопеленгатор), які забезпечують вимірювання кутових координат цілей з більш-менш прийнятною точністю. Такі ситуації призводять до значної невизначеності інформації про місцезнаходження ШО і до затягування, а то й до зриву процесу цілевказування. Для зняття невизначеності іноді застосовують огляд зони пошуку (відповідальності) з двох рознесених на певну відстань РВП, обладнаних пасивними засобами розвідки. Але використання відповідних тріангуляційних методів локалізації шуканих об'єктів (цілей) вимагає, по-перше, не менш ніж подвійної кількості РВП, а, по-друге, організації (в деяких випадках) цілевказування від одного поста на другий, а вже потім - після визначення (розрахунку) дальності до об'єкта від РВП здійснюють цілевказування на рятувально-транспортний засіб або (для варіанта ППО) на засоби "вогневого впливу" (наприклад, на батарею ЗАК). Таким чином, невимірювання дальності з одиночного РВП призводить до суттєвого затягування процесу цілевказування або (в багатьох випадках) до зриву його, а отже - до тактичних втрат в рятувальних роботах або в ППО. Як прототип запропонованого технічного рішення вибираємо спосіб реалізації цілевказування, що застосовується, наприклад, в ЗАК "С-60" [6, 8, 9]. Його суть полягає в нижченаведеній послідовності операцій. На фіг. 1 зображені: горизонт 1; РВП 2, взаєморозташування якого (для спрощення пояснень в горизонтальний площині) з батарейною СГН 3 задане відомим вектором бази Б ; траєкторія 4 просторового переміщення ШО 5 та її проекція 6 на горизонтальну площину, в якій розташовані РВП 2 і СГН 3. Засобами пошуку і спостереження РВП 2, наприклад, радіолокаційною станцією кругового чи секторного огляду виявляють та ідентифікують ШО 5 як повітряну ціль, і, починаючи з моменту її місцезнаходження в точці ШО1, вимірюють її координати, наприклад, в земній системі координат (ЗСК), пов'язаній, скажімо, з певним опорним напрямком S , відносно якого вимірюють кути просторового положення (КПП) лінії спостереження (ЛС) 7, а саме: азимутальний кут b 1 і кут місця j1. В цей же момент вимірюють дальність до цілі Д1, після чого супроводжують її ЛС 7 на ділянці до точки ШО2, періодично вимірюють полярні координати в ЗСК і обчислюють на підставі цього масиву даних параметри руху цілі для того, щоб спрогнозувати і врахувати переміщення цілі, зокрема - за час передачі інформації і виконання цілевказування споживачем. Оскільки відомі (у вигляді азимута b Б і дистанції Б ) взаєморозташування РВП 2 і батарейної СГН 3 в обчислювальному пристрої РВП 2 (або СГН 3) ураховують величину і напрямок бази і визначають потрібні КПП осі 8 конуса апертури 9 ЗВС СГН З (а саме - азимутальний кут a і кут місця y), які передають по каналу зв’язку на споживача у вигляді відповідних сигналів. Згідно з цими сигналами на СГН розвертають (наводять) апертуру ЗВС (наприклад, радіолокатор СГН) на вказані величини КПП і встановлюють контакт з ціллю в розрахованій точці ШОК. Відомий спосіб-прототип має істотні недоліки, а саме: а) його виконання може бути досягнуто лише в разі вимірювання засобами РВП дальності до виявленого ШО, що не завжди можливе з точки зору періоду доби (метеоумов), чи тактичних обставин; б) розрахунок точки контакту апертури ЗВС з ШО передбачає гіпотезу прямолінійного і рівномірного переміщення ШО (цілі) за інтервал часу, що витрачається на передачу сигналів, відповідних потрібним КПП апертури ЗВС, і на виконання самих розворотів приводами апертури ЗВС. А оскі 2 33686 льки остання складова цього інтервалу становить декілька секунд (>1,5-2,0), то ймовірне (наприклад, внаслідок демаскованого пошуку цілі засобами РВП або внаслідок випадкового маневрування аварійного ШО) відхилення реального положення ШО від розрахованої точки контакту, що може призвести до зриву реалізації цілевказування з ймовірними тактичними наслідками-втратами. Метою запропонованого технічного рішення є створення такого способу реалізації цілевказування, який не потребує вимірювання дальності до ШО і зводить до прийнятного мінімуму (практично до нуля) вплив запізнення на передачу та виконання сигналів цілевказування. Поставлена мета забезпечується тим, що в запропонованому способі реалізації цілевказування, в процесі якого засобами розвідувальновимірювального поста виявляють, ідентифікують і супроводжують лінією спостереження шуканий об'єкт-ціль, вимірюють в узгодженій системі координат кути просторового положення лінії спостереження, передають по каналу зв'язку у вигляді сигналів дані вимірювань споживачу з відомими відносними координатами, спочатку апертуру засобу візирування споживача орієнтують на точку місцезнаходження засобу спостереження розвідувально-вимірювального поста, а потім наведення її виконують шляхом послідовних доворотів осі апертури в сторону від засобу спостереження до об'єкта-цілі в поверхні, яку задають точкою місцезнаходження засобу візирування споживача і поточним просторовим положенням лінії спостереження аж до моменту встановлення контакту, засобу візирування споживача з об'єктом-ціллю. Порівняння запропонованого способу реалізації цілевказування із способом-прототипом показує помітну різницю як в кількості і послідовності виконуваних операцій, так і у функціональній суті деяких з них. Як доказ, нижче порівнюється лаконічний зміст кожного із способів. Прототип Заявлюваний виявляють ідентифікують ШО супроводжують його ЛС вимірюють КПП ЛС вимірюють Д до ШО визначають парамет- ри руху ШО враховують прогнозо- ване переміщення ШО попередньо орієнтують апертуру на РВП визначають потрібні визначають (поточні) КПП апертури ЗВС КПП апертури ЗВС наводять (розверта- наводять апертуру ють) апертуру ЗВС ЗВС шля хом послідовних доворотів в поверхні, яку задають в просторі Встановлюють контакт з ШО Оскільки в інших те хнічних рішеннях в області пошуково-рятувальних робіт чи військової техніки запропонована сукупність функціональнотехнічних ознак не виявлена, то можна зробити висновок щодо новизни заявлюваного способу. Функціонально-технологічний аналіз нововведених операцій і взаємопов'язання їх з існуючими операціями показує можливість їх відтворення такими відомими апаратно-конструктивними засобами, а саме: початкове (попереднє) орієнтування апертури ЗВС може бути виконане, наприклад, для оптико-телевізійного візиру або для пошуковеслідкуючого теплопеленгатора (див. [1, 4]) шляхом завчасного встановлення фіксованих відлікових ("нульових") положень сервоприводів, які розвертають вхідні оптичні компоненти (скажімо, головне дзеркало і т.п.), таким чином, щоб вісь конуса вхідної апертури цих агрегатів споживача була заздалегідь орієнтована вздовж лінії, що з'єднує ЗВС і РВП (тобто, вздовж "бази"); визначення поверхні, в якій виконують наведення апертури ЗВС шляхом її послідовних доворотів, може бути виконано у спеціалізованому обчислювальному пристрої [10], який розташований, наприклад, у споживача поряд із ЗВС і в якому реалізований алгоритм обчислювання поточного положення площини, яка проходить через точку ЗВС і рухому в просторі пряму ЛС; зрозуміло, що в цьому ж агрегаті може бути виконана операція визначення поточних значень КПП апертури ЗВС і вироблені відповідні сигнали для відпрацювання, скажімо, згаданими вище сервоприводами. Отже, заявлений спосіб відтворюється за допомогою відомих апаратно-схемотехнічних засобів, що дозволяє зробити висновок про можливість промислового впровадження винаходу. Аналіз мети винаходу і запропонованих ознак його дозволяє зробити такі судження: а) для реалізації цілевказування апертуру ЗВС розвертають таким чином, щоб вісь апертури під час розвертання перетиналася з ЛС, яка супроводжує виявлений та ідентифікований ШО. Для цього необхідно і достатньо мати сигнали від РВП, відповідні КПП супроводжуючої ЛС, в одній з точок якої знаходиться реальний ШО. Тобто немає потреби в будь-якому вимірюванні дальності до ШО. Це надає вагомі переваги запропонованому способові, оскільки дозволяє застосувати на РВП лише пасивні (тобто, не демаскуючі) засоби розвідки і спостереження, які забезпечують лише вимірювання КПП слідкуючої ЛС. Позитивний ефект виявляється в тактичних перевагах потаємного слідкування за ціллю, а також в можливому спрощенні апаратурного складу РВП; б) оскільки наведення апертури ЗВС виконується по слідкуючій ЛС, в одній з точок якої знаходиться реальний ШО - ціль, то відпадає потреба в розрахунку будь-якого упередженого місцезнаходження ШО. Таким чином, контакт ЗВС з ШО відбувається при будь-якому маневруванні останнього. Отже, заявлюваний спосіб забезпечує ефект більшої безпомилковості (достовірності) цілевказування. Додатковою перевагою нового способу є можливість розрахункового визначення дальності до ШО від ЗВС (або від РВП) в момент контакту і далі за тріангуляційною схемою, тобто з належною потаємністю для цілі, що може мати певний тактичний ефект, скажімо, в інтересах ППО. Все це свідчить про корисний ефект запропонованого способу. Нарешті, в ньому використаний інший принцип встановлення контакту ЗВС з ШО: замість наведення апертури ЗВС в розраховану точку простору, де має бути ціль, виконується на 3 33686 ведення вздовж ЛС, де напевне вона є. В запропонованому способі усун уті недоліки способупрототипу: він не потребує вимірювання дальності до ШО з РВП і забезпечує більш надійне встановлення контакту ЗВС з ШО. Це свідчить про винахідницький рівень запропонованого технічного рішення. Таким чином, запропонований спосіб реалізації цілевказування відповідає всім необхідним критеріям патентоздатності. Суть винаходу пояснюється нижченаведеним описом і кресленнями, де представлені: фіг. 1 просторова тактична схема, що пояснює відомий спосіб-прототип; на фіг. 2 - просторова тактична схема, що ілюстр ує запропонований спосіб. Спосіб реалізації цілевказування містить послідовність таких операцій і може бути здійснений за допомогою вказаної нижче апаратури. На фіг. 2 зображені: горизонт 1; РВП 2; СГН 3; траєкторія 4 просторового переміщення ШО 5 та її проекція 6. Засобами пошуку і спостереження РВП 2, наприклад, теплопеленгатором [4], в зоні (секторі) відповідальності виявляють ШО 5 і за деякими ознаками (скажімо, тактико-кінематичними) ідентифікують його, наприклад, як повітряну ціль. Починаючи з моменту, що відповідає положенню ШО 5 в точці Ц1 , пасивним засобом спостереження РВП 2 супроводжують ціль, і безперервно чи з певною періодичністю вимірюють в узгодженій системі координат (наприклад, в ЗСК, пов'язаній з опорним напрямком S ) поточні КПП ЛС 7, тобто прямої, яка в кожний момент часу з'єднує РВП 2 і ШО 5, який рухається з будь-яким маневром. До настання моменту Ц1 заздалегідь (скажімо, по попереджувальній команді з РВП) орієнтують на РВП 2 вісь 8 апертури ЗВС, що розташований в точці СГН 3 з відомими відносно РВП 2 координатами в узгодженій системі координат з опорним напрямком S . Для цього сервоприводи ЗВС, які керують положенням визначальних (вихідних) компонентів ЗВС, розвертають апертуру ЗВС в положення, наперед задане, наприклад, даними попередньої топографічної підготовки, або бортовими вимірювачами відносного взаєморозташування РВП 2 і СГН 3, якщо один з них або обидва розташовані на рухомих транспортних засобах. Зазначимо, що на фіг. 2 зображене стаціонарне розташування РВП 2 і ЗВС СГН 3. По каналу зв'язну (скажімо, радійному) починаючи з моменту Ц1, передають (практично миттєво) сигнали, що відповідають значенням вимірюваних КПП ЛС 7, в апаратур у споживача, конкретно - на обчислювальний пристрій будь-якого типу, скажімо, у вигляді бортової ЦОМ (див. [10]). В цьому пристрої реалізовано алгоритм урахування вектора Б взаєморозташування РВП 2 і СГН 3 і рекурентного розрахунку поточних послідовних положень осі апертури ЗВС, а отже - і доворотів її в системі координат споживача (носія З6С). В вихідних апаратно-алгоритмічних блоках цього обчислювального пристрою визначають (поточні) КПП апертури ЗВС і відповідно проводять перетворення розрахованих кутів послідовних доворотів в відповідні сигнали, що послідовно подають на ЗВС. Як ЗВС може бути використаний або теплопеленгатор з вузьким полем огляду (з вузькою апертурою), або координатор [4], або будь-який інший пеленгаційний засіб. Конкретно, сигнали, пропорційні розрахованим кутам доворотів осі 8 апертури ЗВС, подають на сервоприводи компонентів ЗВС, що керують просторовою орієнтацією вхідної апертури, а саме - розворотами осі 8 конуса вхідної апертури ЗВС в узгодженій системі координат. Згідно з цими сигналами наводять апертуру ЗВС шляхом виконання послідовних доворотів і і осі 8 в певній квазікриволінійній поверхні, що створюється сукупністю (множиною) площин, кожну з яких задають точкою місцезнаходження споживача (СГН 3) і послідовним поточним просторовим положенням рухомої ЛС 7. Зрозуміло, що темп послідовних доворотів, тобто дискретність наведення апертури ЗВС в цій квазікриволінійній поверхні, може бути як завгодно високим, оскільки залежить від: темпу поточних вимірювань із РВП 2 КПП ЛС 7; темпу передачі сигналів каналом зв'язку; швидкодії апаратури споживача, в першу чергу - обчислювального пристрою, а також добротністю сервоприводів ЗВС. Вказані послідовні довороти апертури ЗВС здійснюються за допомогою згаданих вище сервоприводів і припиняються в момент контакту ЗВС з реальним ШО (відповідає точці ЦК), який до цього моменту відстежують ЛС 7 з РВП 2. Таким контактом прийнято вважати (як і у відомому способі, так і в новому) або попадання ШО в робочу зону апертури (поля зору) ЗВС, або спрацювання контуру автосупроводження ЗВС, або відповідна команда від оператора споживача, спорядженого яким-небудь дублюючим засобом спостереження. Впровадження запропонованого способу реалізації цілевказування в практику пошуковорятувальних робіт і у військову сферу значно розширює кількість варіантів апаратурного забезпечення РВП, оскільки не потребує обов'язкового вимірювання дистанцій до ШО, а також підвищує достовірність (надійність) встановлення контакту з ШО засобами споживача цілевказування. Слід додати, що внаслідок одночасного вимірювання КПП ЛС з точки РВП і КПП осі апертури ЗВС з точки СП на момент контакту з ШО виникає можливість тріангуляційного визначення дальності до ШО, зокрема від СП. Тобто новий спосіб реалізації цілевказування потенційно здатний виконувати ще одну додаткову операцію - визначення дистанції до ШО (цілі) без демаскування процесу цілевказування. Прийняті скорочення ППО - протиповітряна оборона ЛС - лінія спостереження РВП - розвідувально-вимірювальний пост ЗВС - засіб візирування споживача ЗАК - зенітний артилерійський комплекс СГН - станція гарматного наведення ШО - шуканий об'єкт КПП - кути просторового положення ЗСК - земна система координат СП - споживач Література 1. Справочник офицера противовоздушной обороны. - М.: Воениздат, 1981. 4 33686 2. Волжин Я.Н., Сизов Ю.Г. Борьба с самонаводящимися ракетами. - М.: Воениздат, 1983. 3. Неупокоев Ф.К. Противовоздушный бой. М.: Воениздат, 1989. 4. Авиационные системы информации оптического диапазона: Справочник. - М.: Машиностроение, 1985. 5. Барсуков Ф.И. и др. Телевизионные системы летательных аппаратов. - М.: Сов. радио, 1979. 6. Петров С.И., Шестов И.В. История создания и развития вооружения и военной техники ПВО сухопутных войск России. Ч. І и ч. II. - "ВПК" ЦНИИ МО РФ, 1997. 7. Маначинский Я.Я. и др. Вооружение войск ПВО капиталистических государств. Учебное пособие. - К.: Изд-во ВА ПВО, 1990. 8. Станция орудийной наводки СОН-9А. Руководство службы. - М.: Изд-во МО, 1967. 9. Вооружение сухопутных войск РФ. Каталог. - Т. 1. - АО "Милитэри Пэрэйд", 1995. 10. Горелик Я.Л. и др. Бортовые цифровые вычислительные машины. - М.: Ма шиностроение, 1975. Фіг.1 5 33686 Фіг. 2 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 6
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for realizing targeting
Автори англійськоюBorysiuk Anatolii Oleksiiovych
Назва патенту російськоюСпособ реализации целенаведения
Автори російськоюБорисюк Анатолий Алексеевич
МПК / Мітки
МПК: A62B 37/00, G05D 1/12, H04B 5/02
Мітки: спосіб, цілевказування, реалізації
Код посилання
<a href="https://ua.patents.su/6-33686-sposib-realizaci-cilevkazuvannya.html" target="_blank" rel="follow" title="База патентів України">Спосіб реалізації цілевказування</a>
Спосіб визначення рівня реалізації уваги
Номер патенту: 22651
Опубліковано: 07.04.1998
Автори: Коробчанський Володимир Олексійович, Герасименко Ольга Ігоревна
Мітки: спосіб, реалізації, визначення, рівня, уваги
Формула / Реферат:
Спосіб визначення рівня реалізації уваги, який включає вимірювання показників психофізіологічного стану, який відрізняється тим, що вимірюють максимально необхідний для даного виду праці стан функції уваги, в момент спостереження або середній рівень уваги за тиждень, місяць, квартал і т.д., І при значенні індексу реалізації від 0,4 до 0,7 стан визначають, як оптимальний рівень реалізації функції.
Спосіб підводного видобування корисних копалин та пристрій для його реалізації
Номер патенту: 22396
Опубліковано: 03.03.1998
Автори: Шнюков Євгеній Федорович, Зіборов Альберт Петрович, Франчук Всеволод Петрович, Бордій Андрій Павлович
Мітки: підводного, пристрій, видобування, корисних, копалин, реалізації, спосіб
Формула / Реферат:
1. Спосіб підводного видобування корисних копалин, який включає опускання грунтозабірника, наприклад, з борту судна, заглиблення його у грунт та виконання видобування корисної копалини шляхом розмиву грунту та усмоктування пульпи до появлення вскришних або підстилаючих порід та подальшого переходу на нове місце видобування, який відрізняється тим, що у процесі виконання видобування визначають місце положення обмежувача заглиблення таким...
Спосіб обробки кульок та пристрій для його реалізації
Номер патенту: 32313
Опубліковано: 15.12.2000
Автори: Шепелєв Анатолій Олександрович, Пасічний Олег Олегович
МПК: B24B 11/00
Мітки: спосіб, обробки, пристрій, кульок, реалізації
Текст:
...ділянок у вигляді дуг кола — дозволяє під час роботи отримати на поверхні шариків найбільш раціональну сітку слідів обробки, це забезпечить отримання найбільш високої якості оброблених шариків; спряжених ділянок у вигляді спіралі Архімеду — дозволяє оброблювати шарики з максимальною продуктивністю обробки і достатньо високій якості; спряжених ділянок у вигляді експоненти — забезпечує шарикам під час обробки постійну лінійну швидкість...
Спосіб безконтактного визначення струмів у підземних трубопроводах і пристрій для його реалізації
Номер патенту: 28731
Опубліковано: 16.10.2000
Автори: Стрілецький Юрій Йосипович, Кисіль Ігор Степанович
МПК: G01R 19/145, G01R 29/08, G01R 19/00
Мітки: струмів, підземних, пристрій, безконтактного, визначення, спосіб, трубопроводах, реалізації
Формула / Реферат:
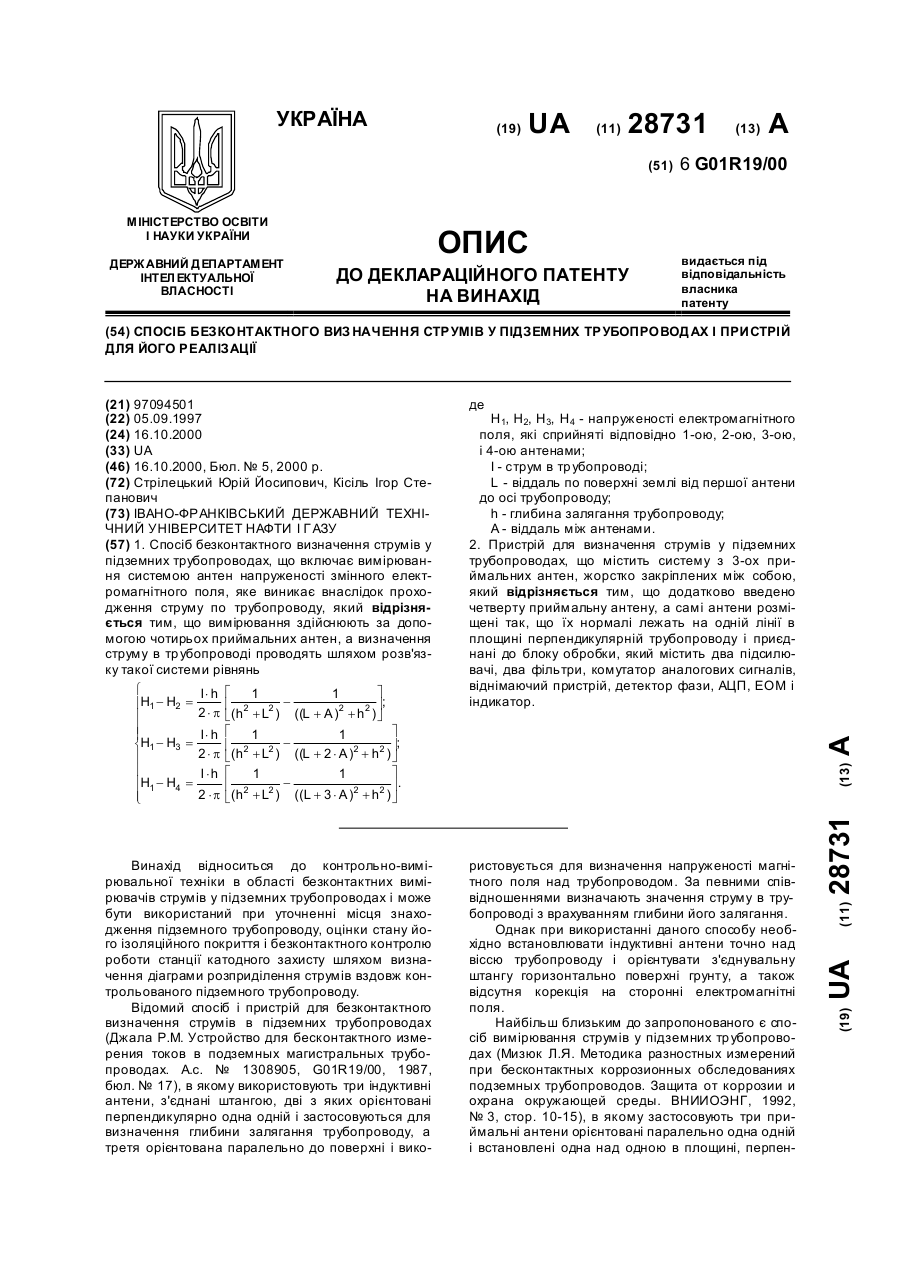
1. Спосіб безконтактного визначення струмів у підземних трубопроводах, що включає вимірювання системою антен напруженості змінного електромагнітного поля, яке виникає внаслідок проходження струму по трубопроводу, який відрізняється тим, що вимірювання здійснюють за допомогою чотирьох приймальних антен, а визначення струму в трубопроводі проводять шляхом розв'язку такої системи рівнянь
Спосіб класифікації дрібнозернистих матеріалів та пристрій для його реалізації
Номер патенту: 28224
Опубліковано: 16.10.2000
Автори: Сергєєв Андрій Михайлович, Афанас'єв Віталій Валентинович
МПК: B07B 13/10, B07B 15/00
Мітки: спосіб, пристрій, дрібнозернистих, класифікації, матеріалів, реалізації
Формула / Реферат:
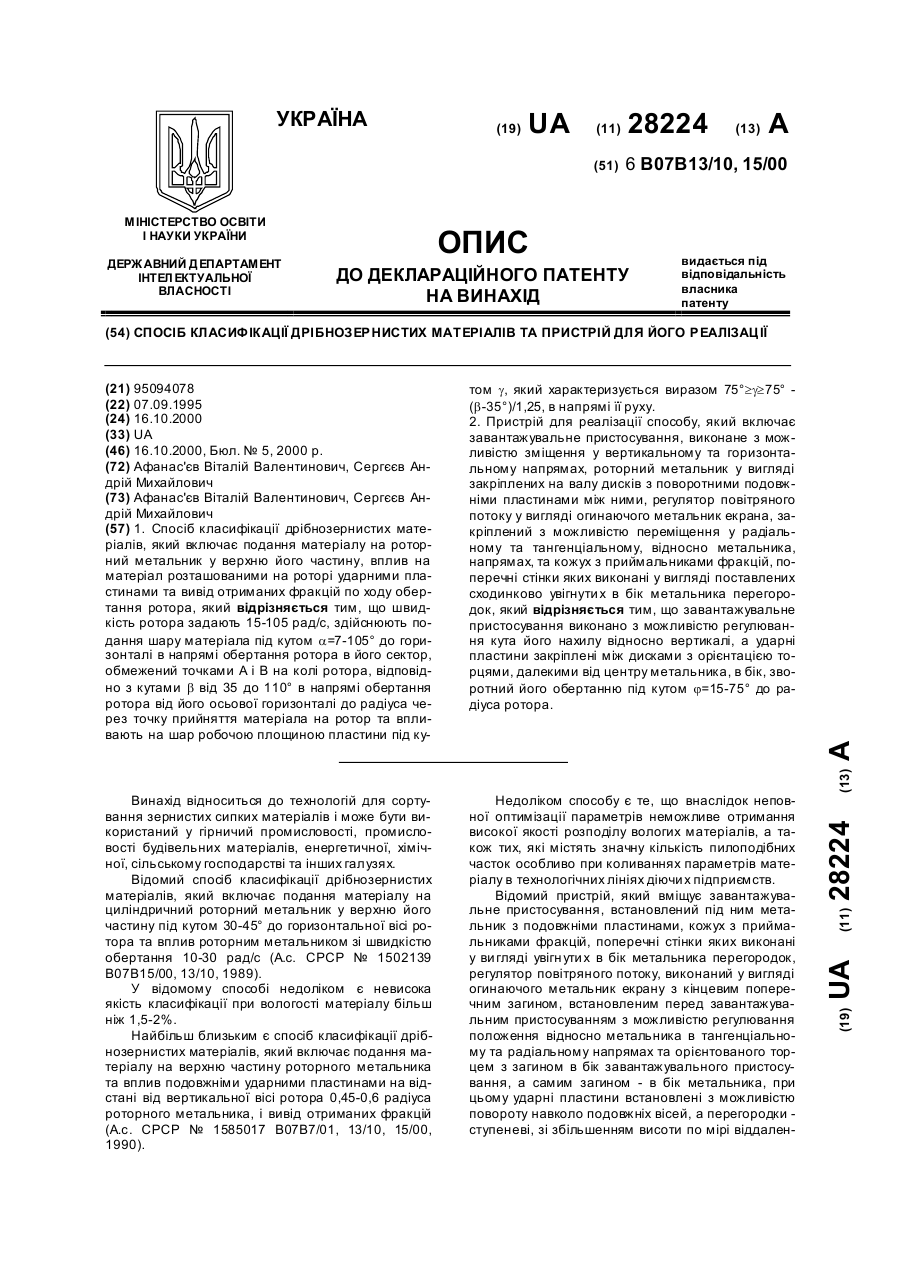
1. Спосіб класифікації дрібнозернистих матеріалів, який включає подання матеріалу на роторний метальник у верхню його частину, вплив на матеріал розташованими на роторі ударними пластинами та вивід отриманих фракцій по ходу обертання ротора, який відрізняється тим, що швидкість ротора задають 15-105 рад/с, здійснюють подання шару, матеріала під кутом до горизонталі в...
Попередній патент: Однополюсний вимикач на два ланцюги
Наступний патент: Ваги
Випадковий патент: Спосіб вимірювання шорсткості поверхні