Спосіб повороту зображення зі збереженням об’єму інформації
Номер патенту: 35189
Опубліковано: 15.03.2001
Автори: Лисенко Геннадій Леонідович, Карпунь Вячеслав Анатолійович, Суприган Віталій Анатолійович
Формула / Реферат
Спосіб повороту зображення зі збереженням об'єму інформації, який полягає в формуванні сигналів координат точкових елементів зображення, зсуві рядків та стовпчиків в горизонтальному та вертикальному напрямках, який відрізняється тим, що початкове зображення записують в матричний індикатор, після чого рядки зображення зсувають по горизонтальній вісі з переносом елементів, на значення пропорційне куту повороту та номеру рядка, а стовпчики зображення зсувають у вертикальному напрямку з переносом елементів, на значення пропорційне куту повороту та номеру стовпчика, при цьому поворот зображення закінчують зсувом рядків зображення на значення кута повороту та номеру рядка з переносом елементів.
Текст
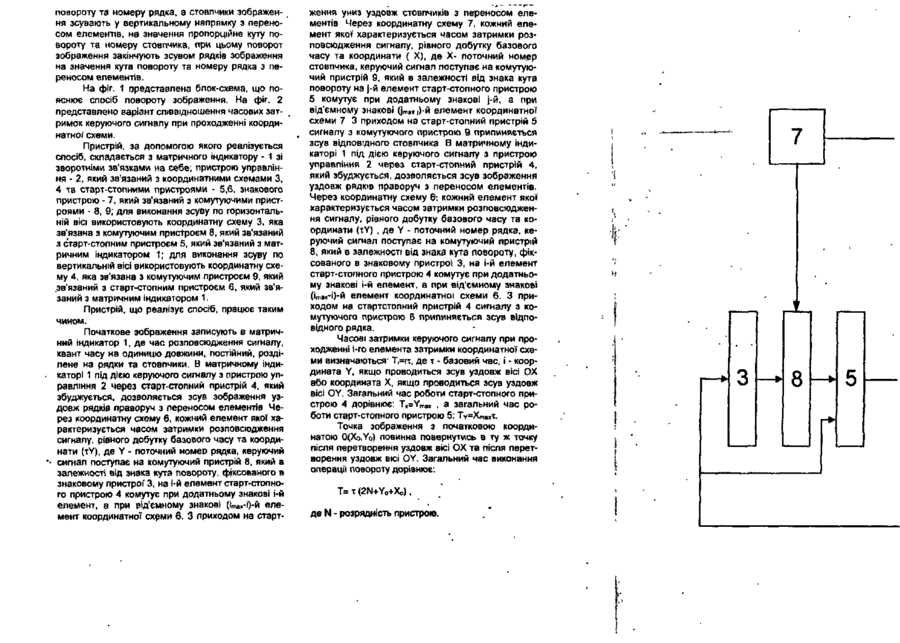
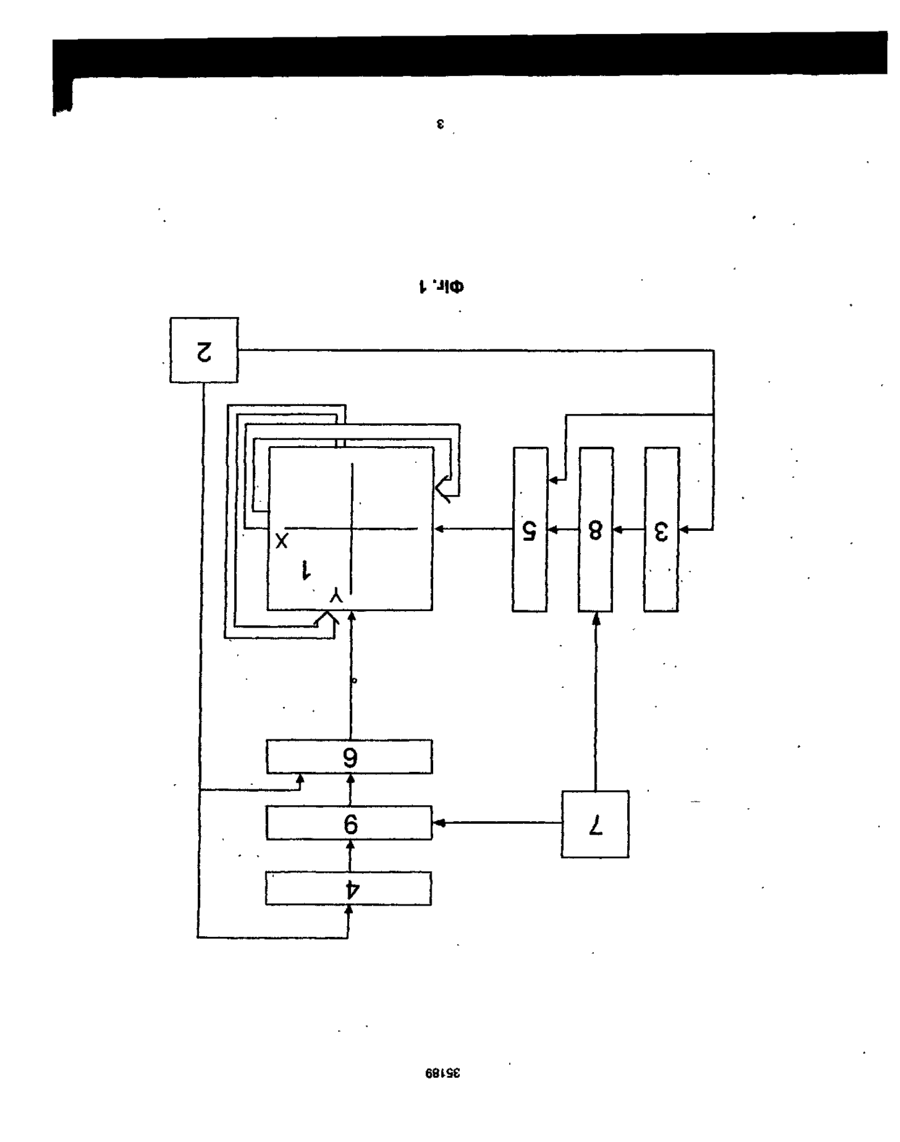
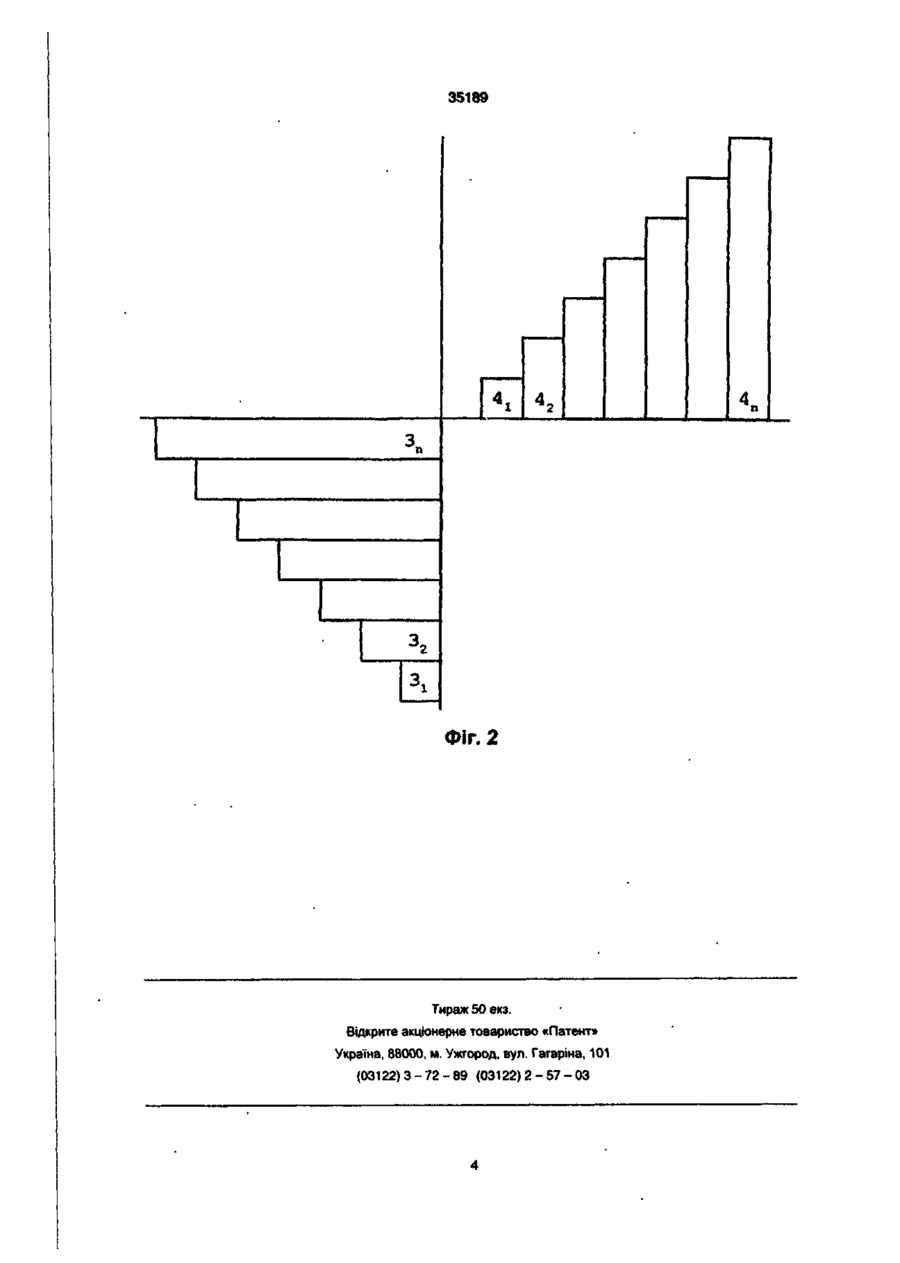
Спосіб повороту зображення зі збереженням об'єму інформації, який полягає в формуванні сигналів координат точкових елементів зображення, зсуві рядків та стовпчиків в горизонталь Винахід відноситься до обчислювальної, техніки, і може використовуватись в системах технічного зору для нормування зображень Відомий спосіб повороту зображення (Заявка Великобританії № 2210760, МКИ G06F15/66. Опубл 14 06 89, Изобретения стран мира, 1991, № 1) Спосіб полягає в тому, що рядок рядок (стовпчик) зображення агітуються у пам'ять зворотнього магазинного типу Потім утворюється "спіральний" тракт перекачки даних у пам'яті із використанням зсуву на один розряд вліво або вправо в шині, що формує зворотній зв'язок із пам'яттю, в залежності від необхідного напрямку повороту зображення, і послідовний потік бітів Із незахопленого зворотнім зв'язком виходу пам'яті перетворюються & нові паралельні рядки (стовпчики), в результаті чого відновлюється повернутий блок Недоліками цього способу є низька швидкодія Відомий спосіб повороту зображення (див. Функциональные элементы и устройства оптоэ•лектроники . Навч. посібник / В П Кожем'яко, Л I. Тімченко. Г.Л Лисенко, Ю Ф Кутэев.-К УМК ВО, 1990, с 193-194). Спосіб грунтується на тому, що із матричного індикатору (МІ) зображення повністю зсувається в буфер Після проходження буферу зображення записується в МІ в тому напрямку, в залежності в яку сторону необхідно повернути зображення. Недоліками цього способу є низька швидкодія та складність пристрою, який його реалізує чево «Патент» ному та вертикальному напрямках, який відрізняється тим, що початкове зображення записують в матричний індикатор, після чого рядки зображення зсувають по горизонтальній вісі з переносом елементів, на значення пропорційне куту повороту та номеру рядка, а стовпчики зображення зсувають у вертикальному напрямку з переносом елементів, на значення пропорційне куту повороту та номеру стовпчика, при цьому поворот зображення закінчують зсувом рядків зображення на значення кута повороту та номеру рядка з переносом елементів. заявці Японії N» 61-221881, МКИ G06F 15/72. Опубл 02 10 86, Изобретения стран мира, 1988, № 11 Спосіб оснований на зсуві рядків на значення тангенсу кута повороту та масштабування з коефіцієнтом, який дорівнює значенню косинуса кута повороту Потім зображення повертається на 90" та виконується попередня процедура, після цього зображення повертається на 90" з метою компенсації. Недоліками способу є низька швидкодія. В основу винаходу поставлено задачу вдосконалення способу повороту зображення зі збереженням об'єму інформації, в якому за рахунок введення нових операцій, досягається збереження об'єму інформації Поставлена задача досягається тим, що в способі повороту зображення зі збереженням об'єму інформації, який полягає в формуванні сигналів координат точкових елементів зображення, зсуві рядків та стовпчиків в горизонтальному та вертикальному напрямку, початкове зображення записують в матричний індикатор, після чого рядки зображення зсувають по горизонтальній вісі з переносом елементів, на значення пропорційне куту повороту та номеру рядка, а стовпчики зображення зсувають у вертикальному напрямку з переносом елеменлв, на значення'пропорційне куту повороту та номеру стовпчика, при цьому поворот зображення закінчують зсувом рядків зображення на значення кута поворогу та номеру рядка з пе йикппигтанна РПРМРИТІИ О) 00 ю 5Г повороту та номеру рядка, а стовпчики зображення зсувають у вертикальному напрямку з переносом елементів, на значення пропорційне куту повороту та номеру стовпчика, при цьому поворот зображення закінчують зсувом рядків зображення на значення кута повороту та номеру рядка з переносом елементів. На фіг. 1 представлена блок-схема, що пояснює спосіб повороту зображення. На фіг. 2 представлено варіант співвідношення часових затримок керуючого сигналу при проходженні координатної' схеми. Пристрій, за допомогою якого реалізується спосіб, складається з матричного індикатору - 1 зі зворотніми зв'язками на себе; пристрою управління - 2, який зв'язаний з координатними схемами З, 4 та старт-стопними пристроями - 5,6, знакового пристрою - 7, який зв'язаний з комутуючими пристроями - 8, 9; для виконання зсуву по горизонтальній вісі використовують координатну схему 3, яка зв'язана з комутуючим пристроєм 8, який зв'язаний з стзрт-стопним пристроєм 5, який зв'язаний з матричним індикатором 1; для виконання зсуву по вертикальній вісі використовують координатну схему 4, яка зв'язана з комутуючим пристроєм 9, який .зв'язаний з старт-стопним пристроєм 6, який зв'язаний з матричним індикатором 1. Пристрій, що реалізує спосіб, працює таким чином. Початкове зображення записують в матричний індикатор 1, де час розповсюдження сигналу, квант часу на одиницю довжини, постійний, розділене на рядки та стовпчики. В матричному індикаторі 1 під дією керуючого сигналу з пристрою управління 2 через старт-стопний пристрій 4, який збуджується, дозволяється зсув зображення уздовж рядків праворуч з переносом елементів Через координатну схему 6, кожний елемент якої характеризується часом затримки розповсюдження сигналу, рівного добутку базового часу та координати (TY), де Y - поточний номер рядка, керуючий сигнал поступає на комутуючий пристрій 8, який в залежності від знака кута повороту, фіксованого в знаковому пристрої 3, на і-й елемент старт-стопного пристрою 4 комутує при додатньому знакові і-Й елемент, а при від'ємному знакові (ітах-і)-й елемент координатної схеми 6. З приходом на старт ження униз уздовж стовпчиків з переносом епементів Через координатну схему 7, кожний елемент якої характеризується часом затримки розповсюдження сигналу, рівного добутку базового часу та координати ( X), де X- поточний номер стовпчика, керуючий сигнал поступає на комутуючий пристрій 9, який в залежності від знака кута повороту на j-й елемент старт-стопного пристрою 5 комутує при додатньому знакові j-й, а при від'ємному знакові (jma*i)-u елемент координатної схеми 7 3 приходом на старт-стопний пристрій 5 сигналу з комутуючого пристрою 9 припиняється зсув відповідного стовпчика В матричному індикаторі 1 під дією керуючого сигналу з пристрою управління 2 через старт-стопний пристрій 4, який збуджується, дозволяється зсув зображення уздовж рядків праворуч з переносом елементів. Через координатну схему 6- кожний елемент якої характеризується часом затримки розповсюдження сигналу, рівного добутку базового часу та координати (T.Y) , де Y - поточний номер рядка, керуючий сигнал поступає на комутуючий пристрій 8, який в залежності від знака кута повороту, фіксованого в знаковому пристрої 3, на І-й елемент старт-стопного пристрою 4 комутує при додатньому знакові і-й елемент, а при від'ємному знакові (іта*-І)-й елемент координатної схеми 6. З приходом не стартстопний пристрій 4 сигналу з комутуючого пристрою 8 припиняється зсув відповідного рядка. Часові затримки керуючого сигналу при проходженні і-го елемента затримки координатної схеми визначаються' Т,=іт, де т - базовий час, і - координата Y, якщо проводиться зсув уздовж вісі ОХ або координата X, якщо проводиться зсув уздовж вісі OY. Загальний час роботи старт-стопного пристрою 4 дорівнює: Tx-Yma, , а загальний час роботи старт-стопного пристрою 5: Ту=ХшакТ. Точка зображення з початковою координатою O(XO,YQ) повинна повернутись в ту ж точку після перетворення уздовж вісі ОХ та після перетворення уздовж вісі OY. Загальний час виконання операції повороту дорівнює: Т= т (2N+Yo+Xo), де N - розрядність пристрою. 8 УКРАЇНА UА 01)35189 (із) А (51) б G06K9/36 МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ ОПИС ДЕРЖАВНИЙ ДЕПАРТАМЕНТ ІНТЕЛЕКТУАЛЬНОЇ ВЛАСНОСТІ ДО ДЕКЛАРАЦІЙНОГО ПАТЕНТУ НА ВИНАХІД видається під відповідальність власника патенту (54) СПОСІБ ПОВОРОТУ ЗОБРАЖЕННЯ ЗІ ЗБЕРЕЖЕННЯМ ОБ'ЄМУ ІНФОРМАЦІЇ (21)99094878 (22)01.09.1999 (24)15.03.2001 (46) 15 03.2001, Бюл. № 2. 2001 р (72) Лисенко Геннадій Леонідович, Суприган Віталій Анатолійович, Карлунь Вячеслав Анатолійович (73) ВІННИЦЬКИЙ ДЕРЖАВНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ (57) Спосіб повороту зображення зі збереженням об'єму інформації, який полягає в формуванні сигналів координат точкових елементів зображення, зсуві рядків та стовпчиків в горизонталь ному та вертикальному напрямках, який відрізняється тим, що початкове зображення записують в матричний індикатор, після чого рядки зображення зсувають по горизонтальній вісі з переносом елементів, на значення пропорційне куту повороту та номеру рядка, а стовпчики зображення зсувають у вертикальному напрямку з переносом елементів, на значення пропорційне куту повороту та номеру стовпчика, при цьому поворот зображення закінчують зсувом рядків зображення на значення кута повороту та номеру рядка з переносом елементів. Винахід відноситься до обчислювальної, техніки, і може використовуватись в системах технічного зору для нормування зображень Відомий спосіб повороту зображення (Заявка Великобританії № 2210760, МКИ G06F15/66. Опубл 14 06.89, Изобретения стран мира, 1991, № 1) Спосіб полягає в тому, що рядок рядок (стовлчик) зображення зчитуються у пам'ять зворотнього магазинного типу Потім утворюється "спіральний" тракт перекачки даних у пам'яті із використанням зсуву на один розряд вліво або вправо в шині, що формує зворотній зв'язок із пам'яттю, в залежності від необхідного напрямку повороту зображення, і послідовний потік бітів із незахоппеного зворотнім зв'язком виходу пам'яті перетворюються в нові паралельні рядки (стовпчики), в результаті чого відновлюється повернутий блок. Недоліками цього способу є низька швидкодія. Відомий спосіб повороту зображення (див.1 Функциональные элементы и устройства оптоэ•лектроники . Навч посібник / В.П Кожем'яко, Л.І. Тімчеико, Г.Л Лисенко, Ю Ф. Кутаєв -К: УМК ВО, 1990, с 193-194). Спосіб грунтується на тому, що із матричного індикатору (МІ) зображення повністю зсувається в буфер. Після проходження буферу зображення записується в МІ в тому напрямку, в залежності в яку сторону необхідно повернути зображення. Недоліками цього способу є низька швидкодія та складність пристрою, який його реалізує через використання буферу. Найбільш близьким до запропонованого способу є спосіб повороту зображення, описаний у заявці Японії № 61-221881, МКИ G06F 15/72. Опубл 02 10 86, Изобретения стран мира, 1988, № 11 Спосіб оснований на зсуві рядків на значення тангенсу кута повороту та масштабування з коефіцієнтом, який дорівнює значенню косинуса кута повороту Потім зображення повертається на 90 е та виконується попередня процедура, після цього зображення повертається на 90° з метою компенсації. Недоліками способу є низька швидкодія. В основу винаходу поставлено задачу вдосконалення способу повороту зображення зі збереженням об'єму інформації, в якому за рахунок введення нових операцій, досягається збереження об'єму інформації Поставлена задача досягається тим, що в способі повороту зображення зі збереженням об'єму інформації, який полягає в формуванні сигналів координат точкових елементів зображення, зсуві рядків та стовпчиків в горизонтальному та вертикальному напрямку, початкове зображення записують в матричний індикатор, після чого рядки зображення зсувають по горизонтальній вісі з переносом елементів, на значення пропорційне куту повороту та номеру рядка, а стовпчики зображення зсувають у вертикальному напрямку з переносом елементів, на значення "пропорційне куту повороту та номеру стовпчика, при цьому поворот зображення закінчують зсувом рядків зображення на значення кута повороту та номеру рядка з переносом елементів. Така послідовність операцій дозволяє зберегти об'єм інформації завдяки тому, що рядки та О) €0 тЮ CO 35189 стовпчики зсуваються в горизонтальному та вертикальному напрямках, початкове зображення записують в матричний індикатор, після чого рядки зображення зсувають по горизонтальній вісі з пе~ реносом елементів, на значення пропорційне куту повороту та номеру рядка, а стовпчики зображення зсувають у вертикальному напрямку з переносом елементів, на значення пропорційне куту повороту та номеру стовпчика, при цьому поворот зображення закінчують зсувом рядків зображення на значення кута повороту та номеру рядка з переносом елементів. На фіг. 1 представлена блок-схема, що пояснює спосіб повороту зображення. На фіг. 2 представлено варіант співвідношення часових затримок керуючого сигналу при проходженні координатної схеми. Пристрій, за допомогою якого реалізується спосіб, складається з матричного індикатору - 1 зі зворотніми зв'язками на себе; пристрою управління - 2, який зв'язаний з координатними схемами З, 4 та старт-стопними пристроями - 5,6; знакового пристрою - 7, який зв'язаний з комутуючими пристроями - 8, 9; для виконання зсуву по горизонтальній вісі використовують координатну схему 3, яка зв'язана з комутуючим пристроєм 8, який зв'язаний з с'тарт-столним пристроєм 5, який зв'язаний з матричним індикатором 1; для виконання зсуву по вертикальній вісі використовують координатну схему 4, яка зв'язана з комутуючим пристроєм 9, який зв'язаний з старт-стопним пристроєм 6, який зв'язаний з матричним індикатором 1. Пристрій, що реалізує спосіб, працює таким чином. Початкове зображення записують в матричний індикатор 1, де час розповсюдження сигналу, квант часу на одиницю довжини, постійний, розділене на рядки та стовпчики. В матричному індикаторі 1 під дією керуючого сигналу з пристрою управління 2 через старт-стопний пристрій 4, який збуджується, дозволяється зсув зображення уздовж рядків праворуч з переносом елементів. Через координатну схему 6, кожний елемент якої характеризується часом затримки розповсюдження сигналу, рівного добутку базового часу та координати (xY), де Y - поточний номеррядка, керуючий сигнал поступає на комутуючий пристрій 8, який в залежності від знака кута повороту, фіксованого в знаковому пристрої 3, на і-й елемент старт-стопного пристрою 4 комутує при додатньому знакові і-й елемент, а при від'ємному знакові (ітах-і)-й елемент координатної схеми 6. З приходом на старт стопний пристрій 4 сигналу з комутуючого пристрою 8 припиняється зсув відповідного рядка. В матричному індикаторі 1 під дією керуючого сигналу з блока керування 2 через старт-стопний пристрій 5, який збуджується, дозволяється зсув зображення униз уздовж стовпчиків з переносом елементів Через координатну схему 7, кожний елемент якої характеризується часом затримки розповсюдження сигналу, рівного добутку базового часу та координати { X), де X- поточний номер стовпчика, керуючий сигнал поступає на комутуючий пристрій 9, який в залежності від знака кута повороту на ]-й елемент старт-стопного пристрою 5 комутує при додатньому знакові j-й, а при від'ємному знакові Отах-і)-й елемент координатної схеми 7. З приходом на старт-стопний пристрій 5 сигналу з комутуючого пристрою 9 припиняється зсув відповідного стовпчика. В матричному індикаторі 1 під дією керуючого сигналу з пристрою управління 2 через старт-стопний пристрій 4, який збуджується, дозволяється зсув зображення уздовж рядків праворуч з переносом елементів. Через координатну схему © , кожний елемент якої • характеризується часом затримки розповсюдження сигналу, рівного добутку базового часу та координати (xY) , де Y - поточний номер рядка, керуючий сигнал поступає на комутуючий пристрій 8, який в залежності від знака кута повороту, фіксованого в знаковому пристрої 3, на і-й елемент старт-стопного пристрою 4 комутує при додатньому знакові і-й елемент, а при від'ємному знакові (ітах-і)-й елемент координатної схеми 6. З приходом на стартстолний пристрій 4 сигналу з комутуючого пристрою 8 припиняється зсув відповідного рядка. Часові затримки керуючого сигналу при проходженні і-го елемента затримки координатної схеми визначаються: Т,=іт, де х - базовий час, і - координата Y, якщо проводиться зсув уздовж вісі ОХ або координата X, якщо проводиться зсув уздовж вісі OY. Загальний час роботи старт-стопного пристрою 4 дорівнює: Tx=Ymax , а загальний час роботи СТарТ-СТОПНОГО ПРИСТРОЮ 5: Ту=ХтахХ. Точка зображення з початковою координатою O(Xo,Yo) повинна повернутись в ту ж точку після перетворення уздовж вісі ОХ та після перетворення уздовж вісі OY. Загальний час виконання операції повороту дорівнює: Т= х (2N+Yo+Xo), де N • розрядність пристрою. Г-ЧФ JUL 9 X І Л 6Q19£ 35189 Фіг. 2 Тираж 50 екз. Відкрите акціонерне товариство «Патент» Україна, 88000. м. Ужгород, вул. Гагаріна, 101 (03122) 3-72-89 (03122) 2-57-03
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for turn of image with retention of information volume
Автори англійськоюLysenko Hennadii Leonidovych, Supryhan Vitalii Anatoliiovych, Karpun Viacheslav Anatoliiovych
Назва патенту російськоюСпособ поворота изображения с сохранением объема информации
Автори російськоюЛысенко Геннадий Леонидович, Суприган Виталий Анатольевич, Карпунь Вячеслав Анатольевич
МПК / Мітки
МПК: G06F 15/76, G06K 9/36
Мітки: повороту, зображення, збереженням, інформації, спосіб, об'єму
Код посилання
<a href="https://ua.patents.su/6-35189-sposib-povorotu-zobrazhennya-zi-zberezhennyam-obehmu-informaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб повороту зображення зі збереженням об’єму інформації</a>
Спосіб повороту вікна зображення та пристрій для його реалізації
Номер патенту: 33248
Опубліковано: 15.02.2001
Автор: Романюк Олександр Никифорович
МПК: G09G 1/16
Мітки: реалізації, повороту, вікна, спосіб, пристрій, зображення
Текст:
...(З.Л. Рабинович, В.А. Рама,наускас. Типовые операции в вычислительных машинах. К.» Техніка, 1980, с 215-216 - аналог). Спосіб має низьку швидкодію, яка обумовлена тим, що нові координати однієї точки зображення обчислюються послідовно для обох координат за п тактів, що складе загальний час обчислень, рівний тривалості 2-п тактів, а також апаратна складність реалізації даного способу, яка заключаемся в необхідності спеціального...
Пристрій для визначення просторового зміщення зображення об’єкту по відношенню до еталону зображення
Номер патенту: 30433
Опубліковано: 15.11.2000
Автори: Рожков Сергій Олександрович, Тимофеєв Констянтин Васильович, Тернова Тетяна Іванівна, Храпливий Анатолій Петрович, Бражник Олександр Михайлович
Мітки: просторового, об'єкту, еталону, визначення, зміщення, зображення, відношенню, пристрій
Формула / Реферат:
1. Пристрій для визначення просторового зміщення зображення об'єкту по відношенню до еталону зображення, що містить послідовно розташовані прилад для знімання інформації, прилад для зберігання еталону, перетворювач Фур'є і прилад для обчислення кореляційної функції, відрізняючий тим, що він додатково містить два смугових фільтра, входи яких електрично зв'язані з перетворювачем сигналу зображення і сигналу еталону відповідно, а виходи...
Пристрій для визначення координат точки зображення з максимальною яскравістю
Номер патенту: 22957
Опубліковано: 05.05.1998
Автори: Колесницький Олег Костянтинович, Василецький Сергій Анатолійович, Кожем'яко Володимир Прокопович
МПК: G06K 9/46
Мітки: пристрій, визначення, максимальною, яскравістю, координат, точки, зображення
Формула / Реферат:
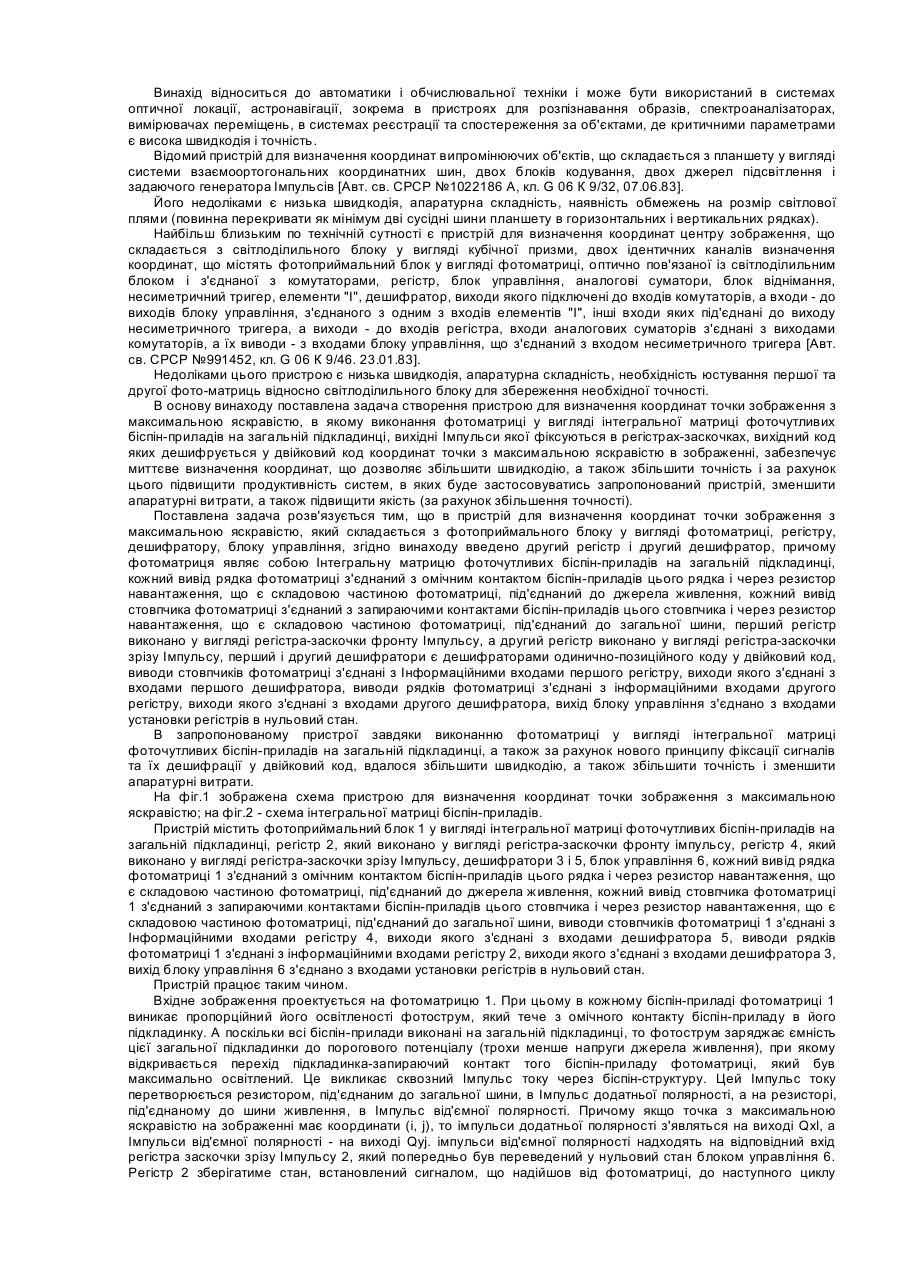
Пристрій для визначення координат точки зображення з максимальною яскравістю, що містить фотоприймальний блок, у вигляді фотоматриці, регістр, дешифратор, блок управління, який відрізняється тим, що в нього введено другий регістр і другий дешифратор, причому фотоматриця являє собою Інтегральну матрицю фоточутливих біспін-приладів на загальній підкладинці, кожний вивід рядка фотоматриці з'єднаний з омічним контактом біспін-приладів цього рядка...
Спосіб переведення зображення на текстильний матеріал та полотно носія зображення для перенесення кольорового зображення на текстильний матеріал
Номер патенту: 26264
Опубліковано: 19.07.1999
Автори: Торен Клаєс-Йоран, Расмуссен Кнуд, Очерблом Інга Стіна, Педерсен Йорген
МПК: D06P 5/00
Мітки: перенесення, зображення, носія, кольорового, спосіб, матеріал, текстильний, полотно, переведення
Формула / Реферат:
1. Способ перевода изображения на текстильный материал из натурального волокна или смеси его с синтетическим волокном путем обработки смачивающим раствором с последующим контактированием с носителем, состоящим из бумаги с нанесенной на нее печатной краской, под давлением, отличающийся тем, что в качестве носители используют бумагу с воздухопроницаемостью 0,5 - 3000нм/Па × с и водопоглощением, соответствующим числу Кобба ниже 50, с...
Спосіб одержання тіньового зображення
Номер патенту: 29924
Опубліковано: 15.11.2000
Автор: Шатагіна Олександра Яківна
МПК: A63J 19/00
Мітки: спосіб, тіньового, зображення, одержання
Формула / Реферат:
Спосіб одержання тіньового зображення, котрий передбачає освітлення фігур-ляльок, які розташовані між джерелом світла та екраном, з наступним одержанням їх тіньового зображення, який відрізняється тим, що освітлення здійснюється під навскісним кутом до площини симетрії екрана, як екран використовують чотири взаємно перпендикулярні відбівні площини, причому фігури-ляльки розташовують на площині, яка є основою екрана.
Попередній патент: Похідні ациламіноіндолу, що проявляють серотонінову 5-нт1 агоністичну активність та похідні аміноіндолу як проміжні сполуки
Наступний патент: Спосіб визначення секреції p-селектину
Випадковий патент: Дренажна система