Захватний пристрій для вантажів в мішках
Номер патенту: 3713
Опубліковано: 27.12.1994
Автори: Глущенко Віктор Михайлович, Рубаненко Яків Борисович, Пудов Герман Михайлович
Формула / Реферат
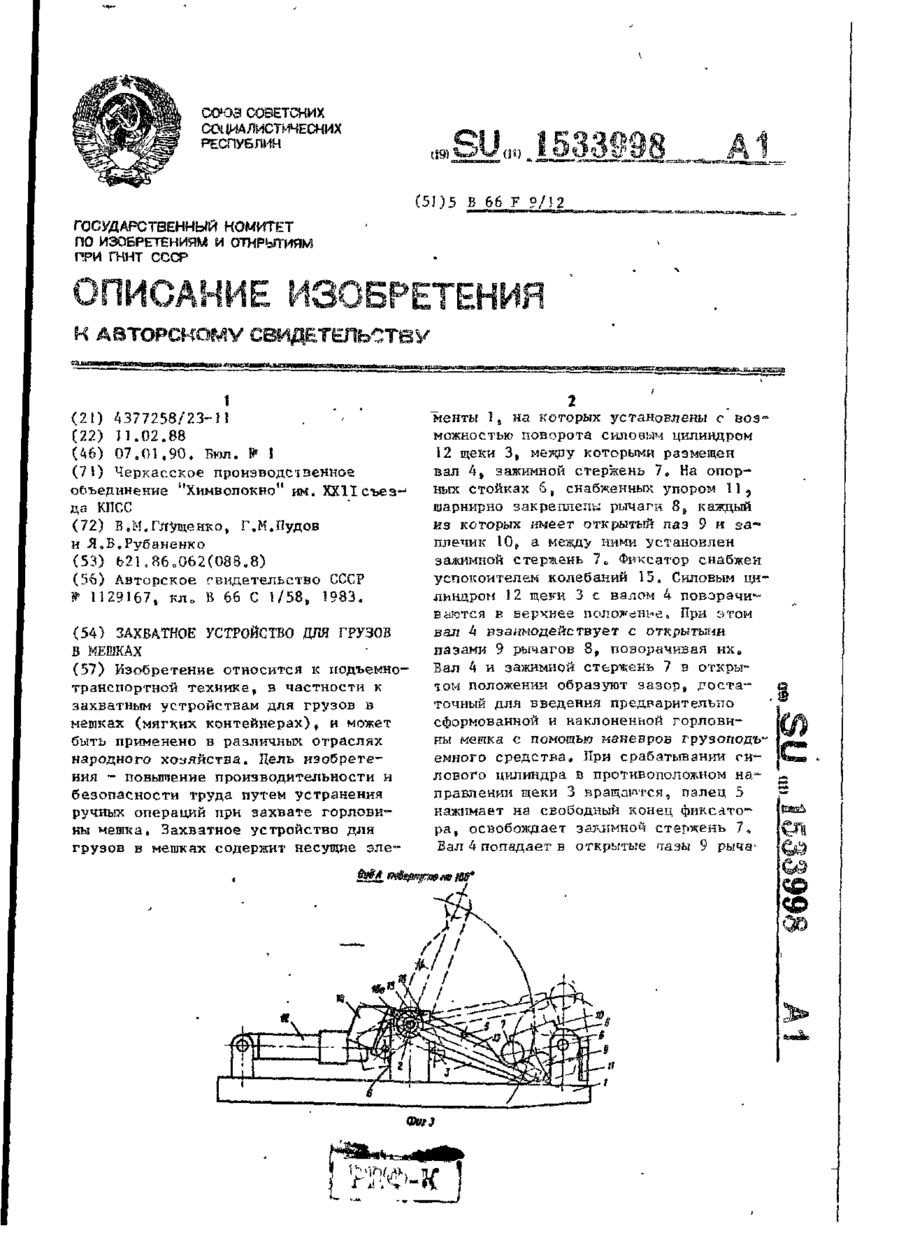
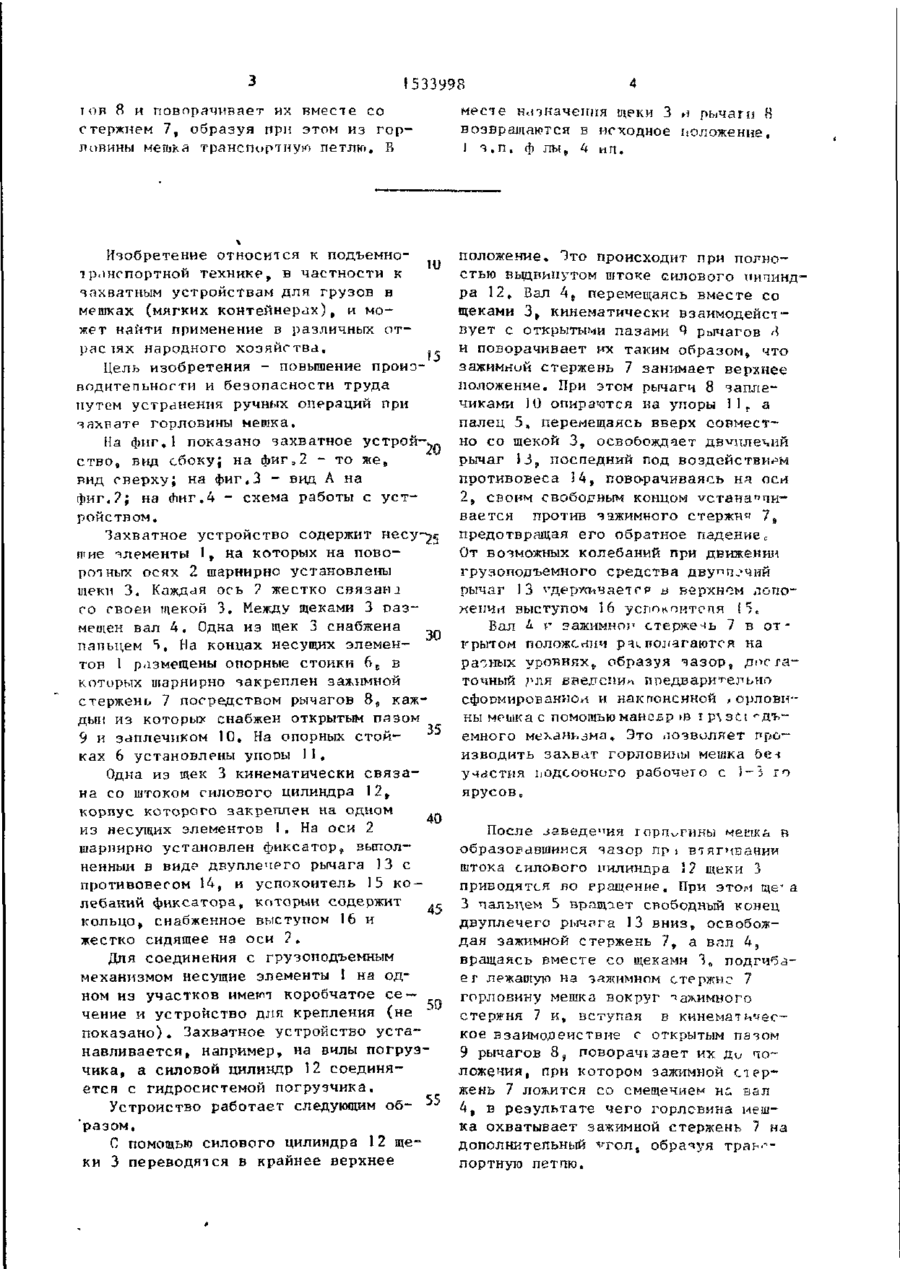
1. Захватное устройство для грузов в мeшках, содержащее несущие элементы, в средней части которых закреплены опоры, на которых с возможностью поворота приводом относительно горизонтальной оси установлены щеки, соединенные между собой валом, зажимной стержень, отличающееся тем, что, с целью повышения производительности и безопасности труда путем устранения ручных операций при захвате горловины мешка, оно снабжено фиксатором и размещенными на концах несущих элементов упорами и опорными стойками, на которых установлены с возможностью поворота в вертикальной плоскости соединенные между собой указанным зажимным стержнем рычаги, выполненные с открытым пазом для взаимодействия с указанным валом при зажиме горловины и заплечиками для взаимодействия с указанными упорами в исходном положении рычагов, указанный фиксатор выполнен в виде двуплечего рычага, установленного на указанной горизонтальной оси с возможностью ограниченного поворота в одном направлении, противовесом, который закреплен на одном его плече, а в другом направлении - пальцем, который закреплен на указанной щеке с возможностью взаимодействия с другим плечом двуплечего рычага, которое установлено с возможностью взаимодействия с указанным зажимным стержнем в его исходном состоянии.
2. Устройство по п. 1, отличающееся тем, что оно снабжено успокоителем колебаний фиксатора, выполненным в виде жестко закрепленного на указанной оси кольца, снабженного выступом для взаимодействия с фиксатором в его исходном положении.
Текст
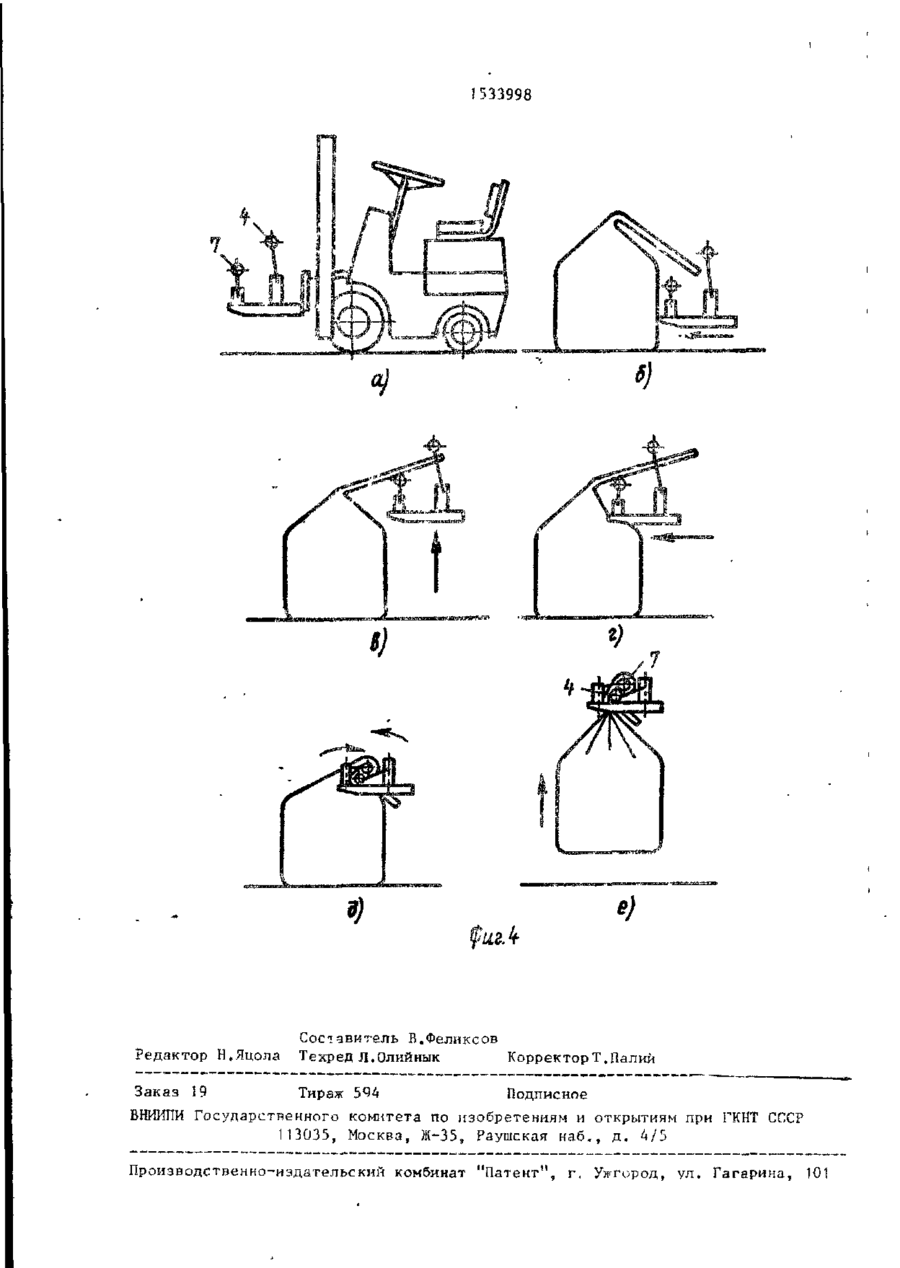
СОЮЗ СОВЕТСКИХ COl 1ИА ЯИСТИЧЕСНИХ РЕСПУБЛИК (51)5 Б 66 F 9/52 ГОСУДАРСТВЕННЫЙ КОМИТЕТ ПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИЯМ ПРИ ГННТ СССР 1 т рл зс; '-дъв емного механьзма» Это лозволяет производить захват горловины мешка Ье 1 участия ііодсооного рабочего с 1-і го ярусов. После лаведечия горп^гикы меш;« в образовавшийся зазор пр і втягивании штока силового цилиндра 12 щеки 3 приводятся во рращение. При этом ще'а 3 пальцем 5 вращает свободный конец двуплечего рычрга 13 вниз, освобождая зажимной стержень 7, а вал 4, вращаясь вместе со щеками 3„ подгибает лежащую на зажимном стержне 7 горловину мешка вокруг зажимного стержня 7 и, вступая в кинематическое взаимодействие с открытым пачом 9 рычагов 8, поворачі зает их Ди положения, при котором зажимной стержень 7 ложится со смещением пс вал 4, в результате чего горлевина мешка охватывает зажимной стержень 7 на дополнительный vr-ол, образуя транспортную петпю. 1533998 В закрытом положении вал 4 своими показано, как подводится зажимной концами, контактируя с несущими элестержень под горловину мешка; на ментами 1 е создает условия,, при фиг«4в - погнем захватного устройсткоторых нагрузка от веса мешка восва вместе с горловиной меівкаі на принимается валом 4 и несущими элефиг„4г - наезд грузоподъемного мехаментами І,,и не передается на силовой низма вместе с захватным устройством цилиндр 12, на мешок. Горловина мешка достаточно При поднятии метка с помощью устжесткая и не сминается при наезде. ройства происходит окончательный за- -« На фиг. 4д показан захват горловины жим горловины мешка под действием его мешка. Вал 4 и зажимной стержень 7 веса. Освобождение горловины мешка с помощью силового цилиндра і 2 перепроизводится поспе установки мешка водятся в крайние нижние положения, на опорную поверхность или ка мешок Происходит захват горловины метка и при складирогании в несколько ярусов }5 формирование транспортной петли в На путеу раскрытия захватного устройст,фигв4е показан подъем мешка, ва с помощью сі ювого цилиндра 12,. •Далее мешок перевозится в нужное При этом вал 4 и зажимной стержень 7 место и устанавливается на опорную занимают крайние верхние положения и поверхность или на другой мешок при освобождают горловину метка. 20 складировании в несколько ярусов, С помощью силового цилиндра 12 произЕерхнее положение конца двуплечего рычага 13 обеспечивается тем, что водится раскрытие захватного устройпротивсвес 14, находящийся в это врества и освобождение горлоьины мешка, мя в нижнем положении, своим концом Грузоподъемный механизм виесте с заупирается в несущие элементы 1 в 25 хватным устройством^ отъезжая от мевг" точке Б. ка, расправляет его горловину зажимПри движении транспортного средстным стержнем 7 и оставляет ее наклова (погрузчика) по неровному полу ненной и готовой к последующему запротивовес J4 может подпрыгнуть вверх,f хвату о тогда свободный конец двуплечего ры- 30 чага 13 может опуститься вниз и выйФ о р м у л а и з о б р е т е н и я ти из контакта с зажимным стержнем 7„ В результате этого рычаги 8 с зажимК Захватное устройство для грузов ным стержнем 7 могут опрокинуться в мешках, содержащее несущие элеменвнутрь устройства, и кинематическое ты, в средней части которых закрепвзаимодействие вала 4 с пазами 9 рылены опоры, на которых с возможностью чагов 8 при замыкании будет невозможповорота приводом относительно горино. Этому препятствует успокоитель зонтальной оси установлены щеки^ сое~ 15» выполненный в виде кольца, закрепдиненные между собой взлому зажиьной ленного на оси 29 на которой закреп, л стержень, о т л и ч а ю щ е е с я лен выступ 16, Б исходном положении тем, что, с целью повышения производи захвата выступ 16 занимает полозкение телъности и безопасности труда путем 16 з, В результате вращение двуплече* устранения ручных операций при захваго рычага 13 с осою 2 ограничивается те горловины мешка,, оно снабжено фик— с одной стороны контактом противове- дс сатором и размещенными на концах несуса 14 с несущими элементами І в точщих элементов упорами и опорными ке Б (фиг.З), а с другой стороны констойками, на которых установлены и тактом выступа 16 о верхнюю заднюю возможностью поворота в вертикальной плоскость двуплечего рычага 13, При плоскости соединенные между собой укаэтом двуплечий рычаг 13 застопорен от CQ занным зажимным стержнем рычаги^ вывращения как по часовой стрелке, так полненные с открытым пазом для взаии против нее и находится против замодействия с указанным валом при зажимного стержня 7, удерживая от повожиме горловины и заплечиками для взарота рычаги 8, имодействия с указанными упорами в Не фиг„4а показано исходное состоя-,, исходном положении рычагов, указанный ние захватного устройства. Вал 4 и фиксатор выполнен в виде двуплечего зажимной стержень 7 занимают крайнее рычага, установленного на указанной. верхнее положение. Устройство готово ' горизонтальной оси с возможностью ог~ к захвату горловины мешка. На фиг.46 раниченного поворота в одном направ 533998 лении, противовесом, который закреплен на одном его плече, а в другом направлении - пальцем, который закреплен на указанной щеке с возможностью взаимодействия с другим плечом двуплечего рычага, которое установлено с возможностью взаимодействия с указанным зажимным стержнем в его исходном гостоянии. 6 9 2. Устройство по п. I, о т л и ч а ю щ е е с я тем, что.оно снабже* но успокоителем колебании фиксатора, выполненным в виде жестко закрепленного на указанной оси кольца, снабженного зыступом для взаимодействия с фиксатором в его исходном положении. ї533998 Г! Редактор Н.Яцола Составитель В.Феликсов Техред Л.Олийнык Корректор Т. Палий Заказ 19 Тираж 594 Подписное ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-издательский комбинат "Патент", г, Ужгород, ул. Гагарина, 101
ДивитисяДодаткова інформація
Назва патенту англійськоюGripping device for loads in bags
Автори англійськоюHluschenko Viktor Mykhailovych, Pudov Herman Mykhailovych, Rubanenko Yakiv Borysovych
Назва патенту російськоюЗахватное устройство для грузов в мешках
Автори російськоюГлущенко Виктор Михайлович, Пудов Герман Михайлович, Рубаненко Яков Борисович
МПК / Мітки
МПК: B66F 9/12
Мітки: захватний, пристрій, вантажів, мішках
Код посилання
<a href="https://ua.patents.su/6-3713-zakhvatnijj-pristrijj-dlya-vantazhiv-v-mishkakh.html" target="_blank" rel="follow" title="База патентів України">Захватний пристрій для вантажів в мішках</a>
Захватний пристрій

Номер патенту: 2845
Опубліковано: 26.12.1994
Автори: Черконос Анатолій Іванович, Комащенко Віталій Іванович, Великий Михайло Ізраілевич, Димченко Олег Васильович, Черконос Оксана Анатоліївна, Федоренко Павло Йосипович
МПК: B66C 1/22
Формула / Реферат:
1. Захватное устройство, содержащее трос, концы которого связаны с подвеской для крюка подъемной машины, изогнутые от вертикальной оси симметрии захватные органы, связанные с ними и закрепленные на горизонтальных осях с возможностью перемещения по тросу ролики, отличающееся тем, что, с целью повышения надежности захвата груза с углублениями на боковых поверхностях, связь роликов с захватными органами выполнена в виде планок, расположенных...
Пристрій для вивантажування насипного вантажу з суден
Номер патенту: 2567
Опубліковано: 26.12.1994
Автори: Пентті Вялімякі, Юріє Олсоні
МПК: B65G 67/00
Мітки: вивантажування, вантажу, суден, насипного, пристрій
Формула / Реферат:
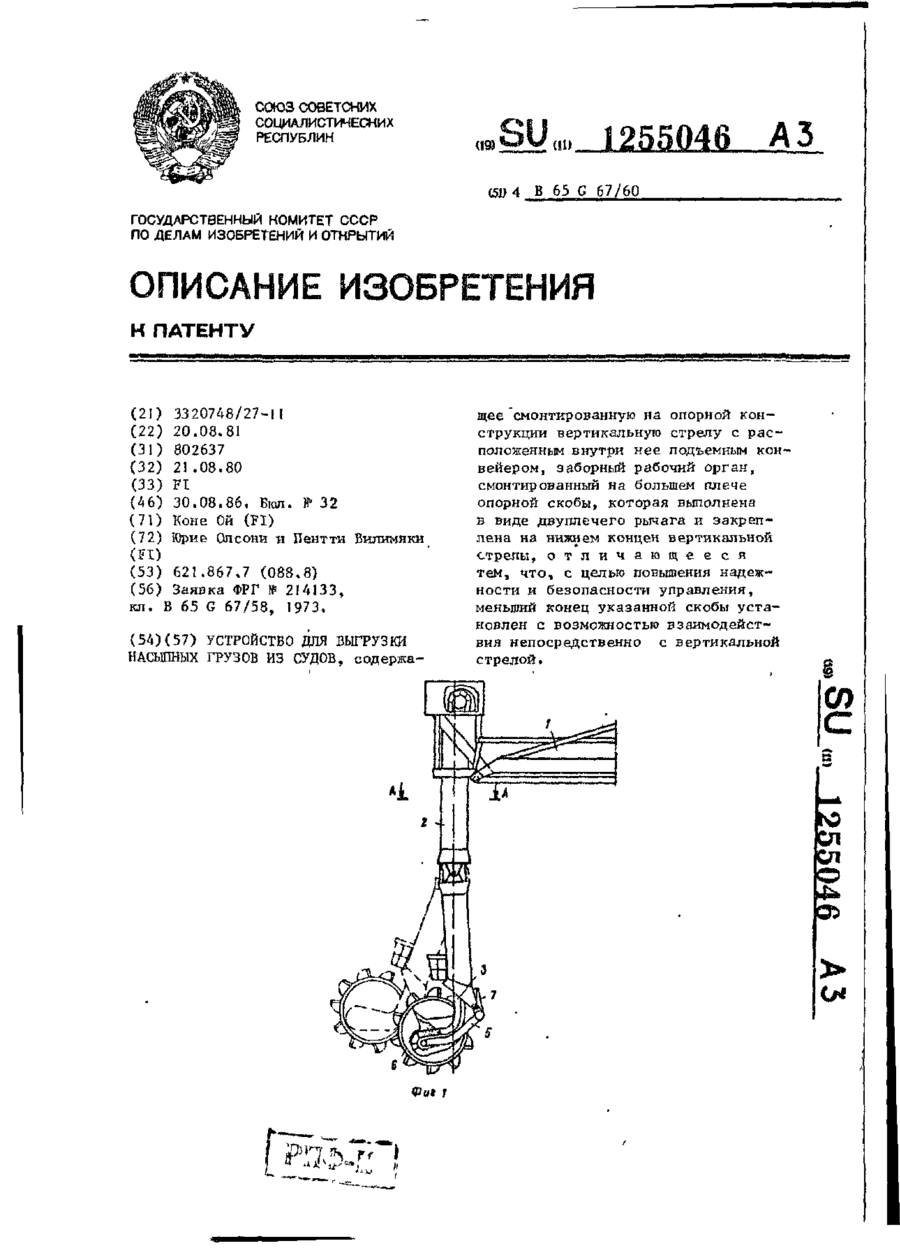
Устройство для выгрузки насыпных грузов из судов, содержащее смонтированную на опорной конструкции вертикальную стрелу с расположенным внутри нее подъемным конвейером, заборный рабочий орган, смонтированный на большем плече опорной скобы, которая выполнена в виде двуплечего рычага и закреплена на нижнем конце вертикальной стрелы, отличающееся тем, что, с целью повышения надежности и безопасности управления, меньший конец указанной скобы...
Амортизуючий пристрій
Номер патенту: 2069
Опубліковано: 20.12.1994
Автор: Рахманов Микола Миколайович
МПК: F16F 1/02
Мітки: амортизуючий, пристрій
Формула / Реферат:
Амортизирующее устройство, содержащее корпус, подвижную часть и упругий элемент, установленный в корпусе с возможностью взаимодействия с его внутренней стенкой, отличающееся тем, что оно снабжено осями, одна из которых закреплена в корпусе по оси устройства, другие - в подвижной части, а упругий элемент выполнен в виде листовых рессор Л-образной формы, установленных на осях со встречно-направленными концами с возможностью их...
Тримач авіаційних вантажів літального апарату
Номер патенту: 1055
Опубліковано: 30.12.1993
Автор: Родних Сергій Євгенович
МПК: B64D 1/00
Мітки: літального, апарату, тримач, вантажів, авіаційних
Формула / Реферат:
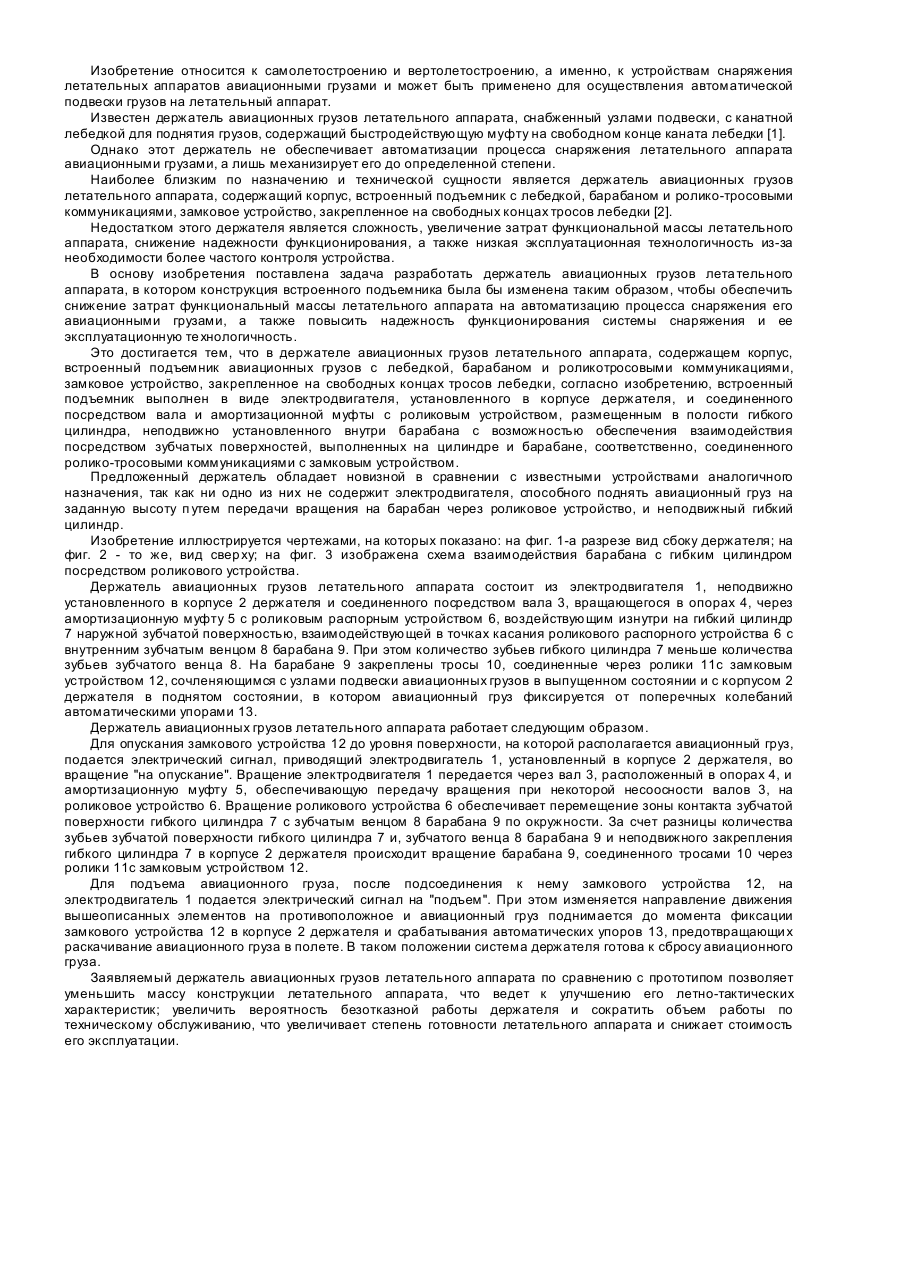
Держатель авиационных грузов летательного аппарата, содержащий корпус, встроенный подъемник авиационных грузов с лебедкой, барабаном и ролико-тросовыми коммуникациями, замковое устройство, закрепленное на свободных концах тросов лебедки, отличающийся тем, что в нем встроенный подъемник выполнен в виде электродвигателя, установленного в корпусе держателя и соединенного посредством вала и амортизационной муфты с роликовым устройством,...
Пристрій для фіксації тварин при годуванні
Номер патенту: 2210
Опубліковано: 26.12.1994
Автори: Кузьміч Ярослав Анатолійович, Верніков Давид Ілліч, Зелінський Валентин Мар'янович
МПК: A01K 1/06
Мітки: фіксації, тварин, пристрій, годуванні
Формула / Реферат:
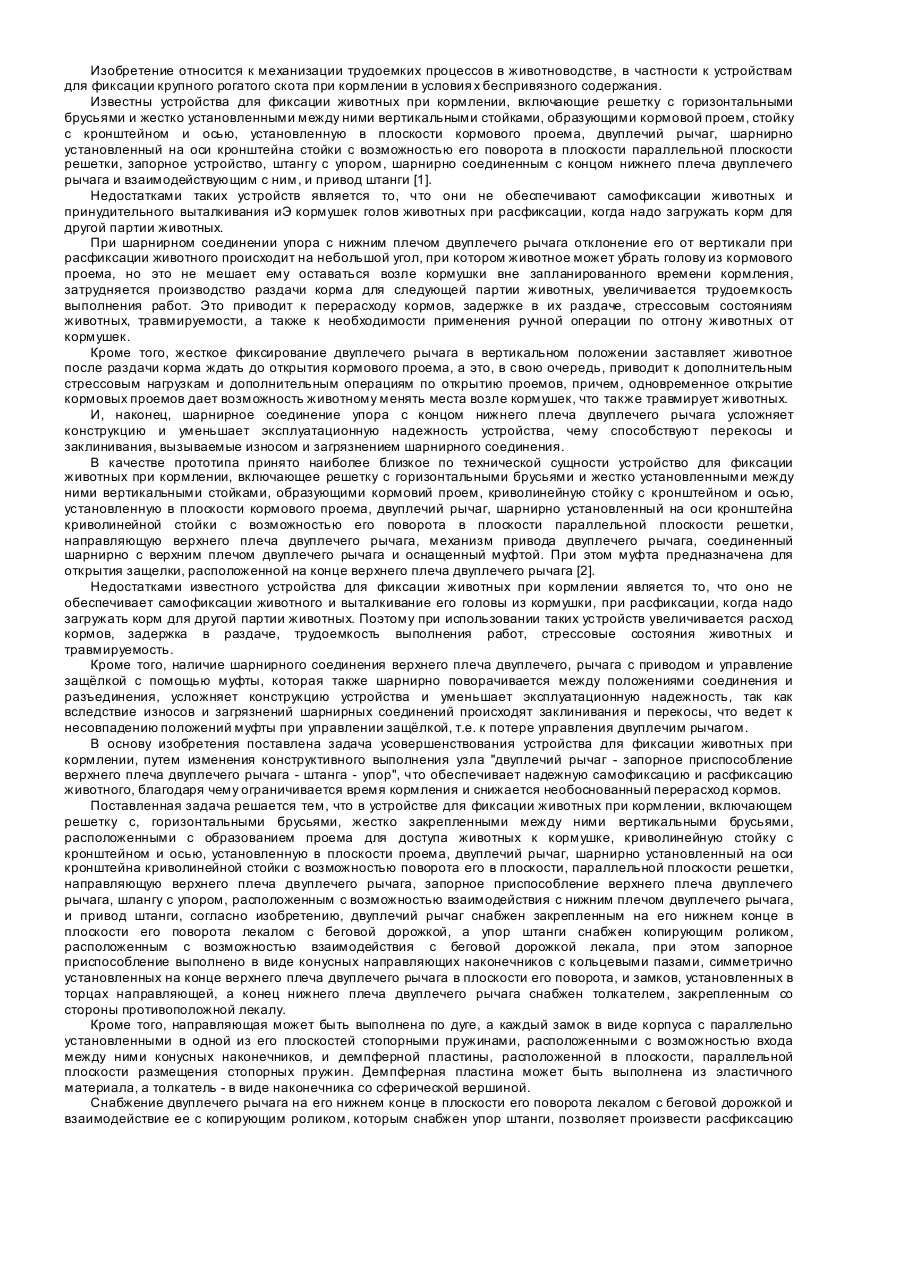
1. Устройство для фиксации животных при кормлении, включающее решетку с горизонтальными брусьями и жестко закрепленными между ними вертикальными брусьями, расположенными с образованием проема для доступа животных к кормушке, криволинейную стойку с кронштейном и осью, установленную в плоскости проема, двуплечий рычаг, шарнирно установленный на сси кронштейна криволинейной стойки с возможностью поворота его в плоскости, параллельной плоскости...
Попередній патент: Спосіб одержання дисперсного кремнезему, що містить бор
Наступний патент: Апарат для вирощування мікроорганізмів
Випадковий патент: Освітлювальний пристрій кліматичної камери, наприклад фітотрона