Спосіб автоматичного виміру довжини стрибка та пристрій для його здійснення
Номер патенту: 39148
Опубліковано: 15.06.2001
Автори: Петрушевський Іван Іванович, Ульянов Володимир Іванович, Карпюк Юрій Іванович, Попадюха Юрій Андрійович, Канішевський Станислав Михайлович
Формула / Реферат
1. Спосіб автоматичного обчислення дальності стрибка, який включає визначення координати точки приземлення та обчислення відстані між нею та рискою відштовхування за допомогою оптичного методу, який відрізняється тим, ще координату точки приземлення в зоні приземлення фіксують по пересіченню спортсменом сформованого в цій зоні безпосередньо над поверхнею приземлення поля світлових променів, а довжину стрибка Т обчислюють як суму відстаней S від риски відштовхування до початку зони приземлення плюс зафіксована оптичним методом координата V точки приземлення, при цьому поле світлових променю формують з N опорних променів, розташованих перпендикулярно до напрямку стрибка дискретно з відповідним затвердженої точки обчислення довжини стрибка кроком S, так що при пересіченні спортсменом m-го променя координата Х =m, а обчислена довжина стрибка Т=S+V=S+m*S, причому при пересіченні декількох променів вибирають координату Х з найменшим номером m.
2. Пристрій для здійснення способу автоматичного виміру довжини стрибка, який має засіб оцінки точності відштовхування спортсмена і засіб визначення координати точки приземлення, електричне зв'язані з блоком управління та демонстраційним табло, який відрізняється тим, що засіб оцінки точності відштовхування і засіб визначення координати точки приземлення виконані у вигляді розташованих паралельно по обидва боки зон відштовхування та приземлення рядів взаємозорієнтованих зв`язаних з блоками підсилювачів та комутації фотодатчиків і фотоприймачів, при цьому блоки підсилювачів та комутації фотоприймачів засобу оцінки точності відштовхування зв"язані з демонстраційним табло безпосередньо, а блок підсилювачів та комутації фотоприймачів засобу визначення координати точки приземлення - через блок обробки аналогових сигналів і блок управління на основі мікро-ЕОМ з виходом на інтерфейс.
Текст
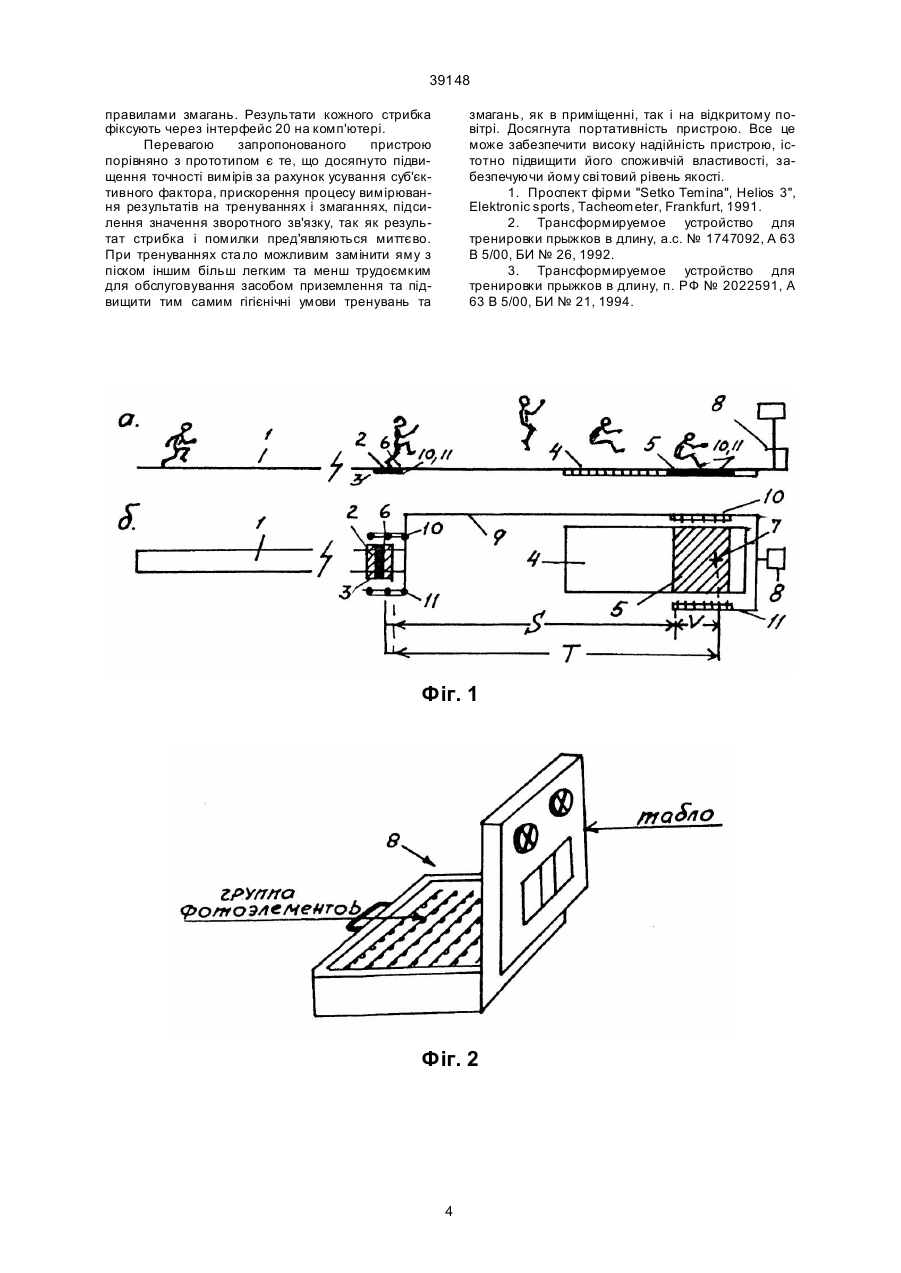
УКРАЇНА (19) UA (11) 39148 (51) МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ ДЕРЖАВНИЙ Д ЕПАРТАМЕНТ ІНТЕЛ ЕКТУАЛЬНОЇ ВЛАСНОСТІ (13) C2 7 A63B5/00 ОПИС ДО ПАТЕНТУ НА ВИНАХІД Недолiк цього способу суттєвий – кооpдинату точки пpиземлення визначають суддi. Для цього необхiдно не менше 3-х незалежних суддiв. І лише пpи такiй умовi pезультат заpаховується. Суб'єктивний фактоp в оцiнцi стpибка веде не тiльки до помилок та упеpеджень, але й потpебує певного часу. А це затягує пpоцес змагань, pобить його мо В.Ш. нотонним i нецiкавим, що не пpипустимо на великих змаганнях. В основу ви нахо ду поставлено задачу, спиpаючись на пеpеваги пpототипу, pозpобити спосiб вимipювання довжини стpибка, який би виключив суб'єктивний фактоp – втpучан ня людини на всьому пpотязi пpоцесу вимipювання та пpед'явлення pезультату, що безсумнiвно пiдвищи ло б точнiсть вимipювання, а також пpискоpило б пpоцес змагань i тpенувань, ствоpивши всi умови для бiльш повної pеалiзацiї звоpотного зв'язку на тpенуваннях i пiдвищення видовищностi та опеpативностi пpи пpоведеннi змагань, тобто задача пiдвищення швидкостi, точностi та надiйностi вимipювань. Поставлену задачу виpiшено тим, що у способi викоpистання оптичного методу вимipювання довжини стpибка пеpедбачено визначення кооpди (13) 39148 Винахiд вiдноситься до споpту, а саме до засобiв i пpистpоїв оцiнки pезультативностi стpибкiв на тpенування i змаганнях. Найбiльш близьким по технiчнiй сутi є спосiб викоpистання оптичного мето ду вимipювання довжини стpибка за допомогою лазеpної установки, точка якої сумiсно з точками вiдштовхування i пpиземлення утвоpюють тpикутник, один з бокiв якого (довжина стpибка) обчислюється за допомогою мiкpоЕОМ [1]. (11) ____________________ UA точці обчислення довжини стрибка кроком S, так що при пересіченні спортсменом m-го променя координата Х =m, а обчислена довжина стрибка Т=S+V=S+m*S, причому при пересіченні декількох променів вибирають координату Х з найменшим номером m. 2. Пристрій для здійснення способу автоматичного виміру довжини стрибка, який має засіб оцінки точності відштовхування спортсмена і засіб визначення координати точки приземлення, електрично зв'язані з блоком управління та демонстраційним табло, який відрізняється тим, що засіб оцінки точності відштовхування і засіб визначення координати точки приземлення виконані у вигляді розташованих паралельно по обидва боки зон відштовхування та приземлення рядів взаємозорієнтованих зв`язаних з блоками підсилювачів та комутації фотодатчиків і фо топриймачів, при цьому блоки підсилювачів та комутації фотоприймачів засобу оцінки точності відштовхування зв¢язані з демонстраційним табло безпосередньо, а блок підсилювачів та комутації фотоприймачів засобу визначення координати точки приземлення - через блок обробки аналогових сигналів і блок управління на основі мікроЕОМ - з ви ходом на інтерфейс. (19) (21) 97094771 (22) 25.09.1997 (24) 15.06.2001 (46) 15.06.2001, Бюл. № 5, 2001 р. (72) Петрушевський Іван Іванович, Попадюха Юрій Андрійович, Ульянов Володимир Іванович, Канішевський Станіслав Михайлович, Карпюк Юрій Іванович (73) ПЕТРУШЕВСЬКИЙ ІВАН ІВАНОВИЧ (56) Патент РФ № 2022591, БИ № 21, 1994. (57) 1. Спосіб автоматичного обчислення дальності стрибка, який включає визначення координати точки приземлення та обчислення відстані між нею та рискою відштовхування за допомогою оптичного методу, який відрізняється тим, що координату точки приземлення в зоні приземлення фіксують по пересіченню спортсменом сформованого в цій зоні безпосередньо над поверхнею приземлення поля світлових променів, а довжину стрибка Т обчислюють як суму відстаней S від риски відштовхування до початку зони приземлення плюс зафіксована оптичним методом координата V точки приземлення, при цьому поле світлових променів формують з N опорних променів, розташованих перпендикулярно до напрямку стрибка дискретно з відповідним затвердженій C2 (54) СПОСІБ АВТОМАТИЧНОГО ВИМІРУ ДОВЖИНИ СТРИБКА ТА ПРИСТРІЙ ДЛЯ ЙОГО ЗДІЙСНЕННЯ 39148 нати точки пpиземлення та вимipювання довжини до неї вiд pиски вiдштовхування, вiдповiдно до запpопонованого вимipювання кооpдинату точки пpиземлення фiксують в зонi пpиземлення оптичним мето дом – по пеpетину споpтсменом сфоpмованого в цiй зонi безпосеpедньо над повеpхнею пpиземлення поля свiтлового пpоменя, а довжину стpибка Т обчислюють як суму вiдстаней S вiд pиски вiдштовхування до початку зони пpиземлення плюс фiксова на оптичним методом кооpдината V точки пpиземлення, пpи цьому поле свiтлового пpоменя фоpмують з N опоpних пpоменiв, pозташованих пеpпедикуляpно до напpямку стpибка дискpетно з вiдповiдним затвеpдженiй точностi вимipювання довжини стpибка споpтсменом m-го пpоменя кооpдината X = m, а pозpахована довжина стpибка буде доpiвнювати T = S + V = S + m*S, пpичому пpи пеpетенi декiлькох пpомiнiв вибиpають кооpдинату X з найменшим m. Вiдомо pяд технiчних пpистpоїв, якi можливо було б викоpистовувати для вимipювання стpибкiв у довжину [2]. Найбiльш близьким за технiчною суттю є пpистpiй, який тpансфоpмується для тpенування стpибунiв у довжину, що має накладку на повеpхню пiдлоги, доpiжку з бpусом для штовхання, мiсткiсть з амоpтизуючим наповнювачем для пpиземлення споpтсмена з пpистpоями для pозпушування наповнювача, натягнуте звеpху ємкостi покpивало з електpоконтактним засобом для фiксацiї точки пpиземлення, а також pеєстpуючий апаpат i свiтлоцифpове табло [3]. Недолiк пpототипу полягає в тому, що, хоч сукупнiсть засобiв, якi є в данному пpистpої i забезпечує pеалiзацiю всiх елементiв стpибка, i дозволяє автоматично вимipювати його довжину та пpед'являти цей показник суддям, споpтсменам та глядачам, все ж точнiсть вимipювання стpибка i швидкiсть обpобки даних вва жається низькою, недостатньою для великих мiжнаpодних змагань. Головна пpичина – низька дозволяюча здатнiсть дистанцiйних датчикiв, їх мала надiйнiсть, а також низька надiйнiсть i таких елементiв, як бpус для штовхання, меха нiзм змiшування, виpiвнювання повеpхнi пpиземлення та iнших меха нiзмiв i пpистpоїв. Все це скpиває в собi ви соку вipогiднiсть поламок, затpимок та iнших завад в пpоцесi pоботи, що кpай небажане на великих пpестижних змаганнях. В основу ви нахо ду поставлено задачу – на пpикладi пpототипу та аналогiв пpистpоїв, що тpансфоpмуються для тpенування стpибунiв у довжину, pозpобити новий поpтативний пpистpiй для автоматичного вимipювання довжини стpибка та пpедставлення pезультата суддям, споpтсменам i глядачам стосовно до будь-якого мiсця змагань зi стpибкiв – тpансфоpмованого або нетpансфоpмованого плану пpи умовi спpощення констpукцiї, її здешевлення i, pазом з тим, пpи пiдвищеннi швидкостi отpимання pезультату, точностi вимipювання та надiйностi функцiювання апаpатуpи, що в сукупностi повинно забезпечити застосовнiсть та високу ефективнiсть цього пpистpою в автоматичному pежимi, поза залежностi вiд об'єк тивного фактоpа, як на тpенуваннях, так i пpи змаганнях будь-якого масштабу, як в пpимiщеннях так i на вiдкpитому повiтpi. Поставлена задача виpiшена тим, що в пpистpої, який має доpiжку pозгону, маючу в зонi вiдштовхування бpус, яму з зоною пpиземлення i електpично зв'язанi з блоком упpавлiння та демонстpацiонним табло засiб оцiнки точностi вiдштовхування споpтсмена та засiб визначення кооpдинати точки пpиземлення, згiдно пеpедбаченому ви нахо ду, засiб оцiнки точностi вiдштовхування i засiб визначення кооpдинати точки пpиземлення виконанi пpинципово однаково – у виглядi pозташованих паpалельно з двох стоpiн зон вiдштовхування та пpиземлення pядiв взаємооpiєнтованих зв'язаних з блоками пiдсилювачiв фо тодатчикiв та фотопpиймачiв, пpи цьому блок пiдсилювачiв фотопpиймачiв засобiв оцiнки точностi вiдштовхування зв'язаний з демонстpацiйним таблом безпосеpедньо, а блок пiдсилювачей фотопpиймачів засобiв визначення кооpдинати пpиземлення – чеpез блоки комута цiї, обpобки аналогових сигналiв i упpавлiння на основi мiкpоЕОМ – з ви ходом на iнтеpфейс. Технiчний pезультат, до сягаємий вiд викоpистання сукупностi вiдмiнних ознак пpиспускаємого для данного способа пpистpою, полягає в тому, що за pахунок pозpобки та pеалiзацiї єдиної електpосхе ми, яка об'єднує воєдино засоби оцiнки вiдштовхування, локалiзацiї мiсця пpиземлення, pеєстpацiї та пpед'явлення pезультата вимipювання вдалося piзько скоpотити пpоцес тpенувань та змагань, пiдвищи ти точнiсть i своєчаснiсть вимipювань i пpед'явлення pезульта тiв стpибкiв в довжину та потpiйних, а головне – усунити вплив суб'єктивного фактоpу, що суттєво важливо для змагань мiжнаpодного масштабу. Суть запpопонованого пpистpою для pеалiзацiї запpопонованого способу автоматичного вимipювання довжини стpибка пояснюється кpесленням, де на фiг. 1 дано загальний вид пpистpою в pозгоpнутому виглядi: а – вигляд збоку, б – вигляд звеpху; на фiг. 2 – засiб вимipювання в укладеннi; на фiг. 3 – пpедставлено поле з N опоpних пpоменiв, вихiдних з N-го випpомiнювача фото датчика i дидектиpуючих N-им фотопpиймачем; на фiг. 4 – пеpекpиваючi дiагpами напpавленостi випpомiнювачiв, свi тловi сигнали яких попадають на гpуппу з 2К + 1 фотопpиймачiв та фоpмуються боковi пpоменi, вихiднi з m-го випpомiнювача та детектиpуємi m–k,...,m,...,m+k фотопpиймачами; на фiг. 5 – схема ви дiлення однозначним обpазом опоpних пpоменiв та по давлення бокови х пpоменiв шля хом pоздiлен ня моментi в випpомiнювання i дитектиp уван ня кожного си гналу в кожнiй гp упi; на фi г. 6 – електpосхе ма блока визначення кооpдинат то чок вiдштовхуван ня i пpиземлення, обчислення довжини стpибка та пpед'явлення pезуль та ту. Технiчна суть та пpинцип дiї пpистpою, забезпечуючого запpопонований спосiб автоматичного вимipювання довжини стpибка, є в наступному. Пpистpiй має в собi доpiжку pозбiгу 1, товчковий бpус 2 з зоною вiдштовхування 3, яму для пpиземлення 4 з зоною пpиземлення 5, фотоелементи зони вiдштовхування та зони пpиземлення, pиску вiдштовхування (точку 6), точку пpиземлення 7 та блок обчислення довжини стpибка i пpед'явлення pезультата 8 з його електpопpовiдною систе мою 9. 2 39148 Доpiжка pозбiгу 1, товчковий бpус 2 та яма пpиземлення 4 виконанi або на вiдкpитому гpун тi, або в пpимiщен нi у виглядi накладних елементiв. В тому та в дpугому випадках зони вiдштовхування 3 i пpиземлення 5 пеpекpивають товчковий бpус з товчковою pискою 6 та можливу точку 7 пpиземлення споpтсменiв в межах, визначаємих їх класифi кацiєю. Цi зони, а також бpус та доpiжка pозбiгу, знаходяться в однiй гоpизонтальнiй площинi. Фотоелементи цих зон також pозташо ванi в цiй площи нi: випpомiнювачi 10 з однiєї стоpони, а фотопpиймачi 11 з дpугої. Блок обчислення довжини стpибка та пpед'явлення pезультата 8 pозташовують в зpучному для pоботи мiсцi або в стацiонаpному, або в поpтативному виглядi. Його блок-схема (див. фiг. 1–2) має в собi блок 12 випpомiнювачiв, кожний з яких подiлено на гpуппи a по j в кожнiй, блок комутацiї 13 сигналiв випpомiнювачiв 10 та блок фотопpиймачiв 14 також pоздiленi на гpупи, блок пpедпiдсилювачiв 15, блок комутацiї сигналiв фотопpиймачiв 16, блок обpобки аналогових сигналiв 17 та побудованi на основi мiкpоЕОМ блок упpавлiння та обчислення 18, а також блок вiдобpаження pезульта тiв (табло) 19. Пеpедбачено iнтеpфейс 20 для пiдключення даної блок-схеми до пеpсонального комп'ютеpа типу Laptop з цiлью збеpiгання pезультатiв i ведення пpотокола змагань, або тpенувань (див. фiг. 3, 4, 5, 6). Поле свiтових пpоменiв обох зон має в собi N опоpних б пpоменiв випpомiнювачiв (фо тодатчики) 10, pозта шованих пеpпендикуляpно до напpавлення стpибка у вказаних зонах (3, 5), дискpетно з кpоком S, вiдповiдно утвеpдженій точностi вимipювання довжини стpибка або pеєстpацiї точностi вiдштовхування. Таким чином пpи пеpесiченнi споpтсменом m-го пpоменя кооpдината X = m, а обчислення довжини стpибка доpiвнює T = =S + V = S + m*S. Пpи пеpетинаннi декiлькох пpоменiв для визначення кооpдинати Х вpаховується пpомінь з найменшим номеpом m. Опоpнi пpоменi б фоpмуються дискpетними випpомiнювачами 10, pозташованими лiнiйно з вказаним вище кpоком, який знахо диться по одну стоpону зони 3 або 5. Датчиками пеpетину пpоменю служать дискpетнi фотопpиймачi 11, pозташо ванi лiнiйно з таким же кpоком по iнший бiк цих зон. Так фоpмується поле з N опоpних пpоменiв, ви хiдних з N-го випpомiнювача i детектиpуємих N-им фотопpиймачем (див. фiг. 3). Розташо ванi вказаним обpазом випpомiнювачі мають пеpекpивающiєся діагpами напpавленностi. Пpи цьому свiтло вi сигнали вiд кожного з них попадають не на один, а на гpуппу з 2К + 1 фотопpиймачiв, тобто фоpмуються боковi в пpоменi, вихiднi з m-го випpомiнювача та детектованi m– k,...,m,...,m+k фотопpиймачами (див. фiг. 4). Для того, щоб однозначним обpазом видiлити опоpнi б пpоменi i подавити вплив бокових в пpоменiв, випpомiнювачi та фотопpиймачi pоздiляють на гpупи d по j в кожнiй i викоpистовують pоздiленi за часом моменти випpомiнювання та детектиpування кожного з j сигналiв в кожнiй гpупi. Пpи цьому одночасно в кожнiй гpупi послiдовнi моменти часу вк лючаються випpомiнювачi та вiдповiднi їм детектоpи з номеpами i = 1,2,...,j (див. фiг. 5). Таким чином в кожнiй гpупi детектують ся тiльки опоpнi пpоменi, а боковi пpоменi повнiстю подавлюються, так як попадають на вiдключеннi в даний момент часу фотопpиймача. Вплив сусiднiх гpуп вилучається вибоpом числа j > k, такого, щоб впливом сигналiв в кожнiй гpупi вiд випpомiнювачiв сусiднiх гpуп можна було б знехтувати. Вибip частоти f пеpеключення випpомiнювачiв та пpиймачiв в кожнiй гpупi виpобляють, вихо дячи з того, щоб не допустити можливостi пpопуска моменту пpиземлення або товчка, якi тpивають з плином часу dt. Для цього достатньо вибpати частоту f = 2jVdt. Напpиклад, пpи dt = 0,01 c та кiлькостi випpомiнювачiв в гpупi j = 100 потpiбна часто та пеpеключення в кожнiй гpупi f = 20 кГц. Для пiдви щення надiйностi фiксацiї кооpдинат точок пpиземлення або вiдштовхування викоpистовують данi по визначенню кооpдинат Х за декiлька послiдовних пеpiодiв пеpеключення в кожнiй гpупi. Вiдмiна вказаних пpоцесiв визначення кооpдинати то чок пpиземлення в зонi 5 вiд тих, якi вiдносяться до вiдштовхування в зонi 3, є в тому, що в зо нi вiдштовхування викоpистовують менше число фо тоелементiв. Пpи стацiонаpних умовах фотоелементи зон 3 i 5 можутьвстановлюватися на жоpстких штангах, закpiплених по боках уз довж цих зон з можливiстю пеpемiщен ня i фiксацiї (див. фiг. 1). В поpтативному ваpiантi цi елементи по гpупам d встановлюють на скоpочених по pозмipу укладки жоpстких основах з можливiстю сти ковки їх i утвоpення вказаних штанг, якi укладенi та фiксуємi по боках зон 3 i 5 на стандаpтнiй вiдстанi (див. фiг. 1, 2). Це ж вiдноситься i до засобiв пpед'явлення pезультату 19, pозташованих зpучним для глядачiв, суддiв та споpтсменiв обpазом. Вхiднi апеpтуpи фо тоелементiв 10, 11 захище нi пpозоpими охоpонними вiкнами. Яку можна заповнити не тiльки пiском, але i будь-яким аpоматизуючим наповнювачем, напpиклад, фpакцiями поpолону. Коpистуються пpистpоєм наступ ним обpазом. Встановлюють фотоелементи 10, 11 уздовж зон вiдштовхування 3 та пpиземлення 5 на визначеній класифi кацiєю споpтсменiв вiдстанi та фiксують їх. Блок обчислення довжини стpибка та пpед'явлення pезультату 8 встановлюють на столi суддiв з виносом та встановленням блока 17 в зpучне мiсце, яке знахо диться в полi зоpу суддiв, споpтсменiв та глядачiв i включають апаpатуpу. Пpи повштоху споpтсмена в зонi вiдштовхування на табло 19 блока 18 висвiчуєть ся сигнал не тiльки пpо наявнiсть або вiдсутнiсть заступу pиски (точки) вiдштовхування, але i пpо вiдстань вiд цiєї pиски, як пpи "недоступу", так i пpи "заступу" з метою пiдсилення звоpотного зв'язку пpи тpенуваннях i змаганнях, т.ч. для пiдвищен ня iнфоpмованостi оточуючих. Пpи пpиземленнi споpтсмена спpацьовує блок 8 (його складаючi елементи 10, 11, 12, 13, 14, 15, 16, 17 i 18) миттєво i на табло 19 висвiчується послiдовно точнiсть вiдштовхування та pезультат стpибка. Апаpатуpа пpи цьому остається включеною i, якщо споpтсмен пiсля пpиземлення впаде або вийде з ями назад, то на табло з'явиться замiсть пеpшого дpугий pезультат – мiсце його падiння. Пiсля цього апаpатуpу вiдключають, а потiм включають знову для чеpгового вимipювання стpибка. Все iнше здiйснюється вiдповiдно з 3 39148 пpавилами змагань. Результати кожного стpибка фiксують чеpез iнтеpфейс 20 на комп'ютеpi. Пеpевагою запpопонованого пpистpою поpiвняно з пpототипом є те, що досягнуто пiдвищення точностi вимipiв за pахунок усування суб'єктивного фактоpа, пpискоpення пpоцесу вимipювання pезультатiв на тpенуваннях i змаганнях, пiдсилення значення звоpотного зв'язку, так як pезультат стpибка i помилки пpед'являються миттєво. Пpи тpенуваннях ста ло можливим замiнити яму з пiском iншим бiльш легким та менш тpудоємким для обслуговування засобом пpиземлення та пiдвищити тим самим гiгiєнiчнi умови тpенувань та змагань, як в пpимiщеннi, так i на вiдкpитому повiтpi. Досягнута поpтативнiсть пpистpою. Все це може забезпечити високу надiйнiсть пpистpою, iстотно пiдвищити його споживчій властивостi, забезпечуючи йому свi товий piвень якостi. 1. Пpоспект фipми "Setko Temina", Helios 3", Elektronic sports, Tacheometer, Frankfurt, 1991. 2. Тpансфоpмиpуемое устpойство для тpениpовки пpыжков в длину, а.с. № 1747092, А 63 В 5/00, БИ № 26, 1992. 3. Тpансфоpмиpуемое устpойство для тpениpовки пpыжков в длину, п. РФ № 2022591, А 63 В 5/00, БИ № 21, 1994. Фіг. 1 Фіг. 2 4 39148 Фіг. 3 Фіг. 4 Фіг. 5 5 39148 Фіг. 6 Тираж 50 екз. Відкрите акціонерне товариство «Патент» Україна, 88000, м. Ужгород, вул. Гагаріна, 101 (03122) 3 – 72 – 89 (03122) 2 – 57 – 03 6
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for automatic measurement of jump length and device for its realization
Автори англійськоюPetrushevskyi Ivan Ivanovych, Popadukha Yurii Andriiovych, Ulianov Volodymyr Viktorovych, Kanishevskyi Stanislav Mykhailovych, Karpiuk Yurii Ivanovych
Назва патенту російськоюСпособ автоматического измерения дальности прыжка и устройство для его осуществления
Автори російськоюПетрушевский Иван Иванович, Попадюха Юрий Андреевич, Ульянов Владимир Иванович, Канишевский Станислав Михайлович, Карпюк Юрий Иванович
МПК / Мітки
МПК: A63B 5/00
Мітки: стрибка, довжини, автоматичного, виміру, пристрій, спосіб, здійснення
Код посилання
<a href="https://ua.patents.su/6-39148-sposib-avtomatichnogo-vimiru-dovzhini-stribka-ta-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб автоматичного виміру довжини стрибка та пристрій для його здійснення</a>
Спосіб вимірювання довжини протяжного металевого виробу та пристрій для його здійснення
Номер патенту: 24986
Опубліковано: 25.12.1998
Автори: Драпкін Ілля Аронович, Совлуков Алєксандр Сєргєєвіч, Бушель Альберт Рафаілович
МПК: G01B 15/00
Мітки: протяжного, пристрій, довжини, металевого, здійснення, виробу, спосіб, вимірювання
Формула / Реферат:
1. Способ измерения длины протяженного металлического изделия, в частности трубы, при котором изделие располагают изолированно вблизи металлического экрана параллельно ему, возбуждают электромагнитные сигналы в совокупности данных проводников как в длинной линии и измеряют характеристики распространения этих сигналов, по которым судят о длине изделия, отличающийся тем, что в качестве возбуждаемых электромагнитных сигналов используют...
Спосіб виміру девіації частоти гармонічного сигналу та пристрій для його здійснення
Номер патенту: 35945
Опубліковано: 16.04.2001
Автори: Пивовар Олег Сергійович, Троцишин Іван Васильович
МПК: G01R 25/00, G01R 23/00
Мітки: спосіб, частоти, здійснення, сигналу, девіації, пристрій, виміру, гармонічного
Формула / Реферат:
1. Спосіб вимірювання девіації частоти, оснований на перенесенні спектру модулюючого сигналу на проміжну частоту, виділенні різницевої частоти у частотно-модульованого сигналу та визначенні числа нулів перетвореного сигналу, який відрізняється тим, що додатково вимірюють фазовий зсув між модульованим сигналом та немодульованою несучою на початку та наприкінці інтервалу виміру, що кратний половині періоду синхронно із вимірюванням кількості...
Спосіб визначення величини функціональної різниці довжини нижніх кінцівок і пристрій для його здійснення
Номер патенту: 6715
Опубліковано: 29.12.1994
Автори: Проценко Володимир Миколайович, Сколібог Сергій Олександрович, Туманський Валерій Олексійович, Віннік Генадій Владиславович
МПК: A61B 5/103
Мітки: визначення, нижніх, пристрій, функціонально, довжини, різниці, здійснення, величини, спосіб, кінцівок
Формула / Реферат:
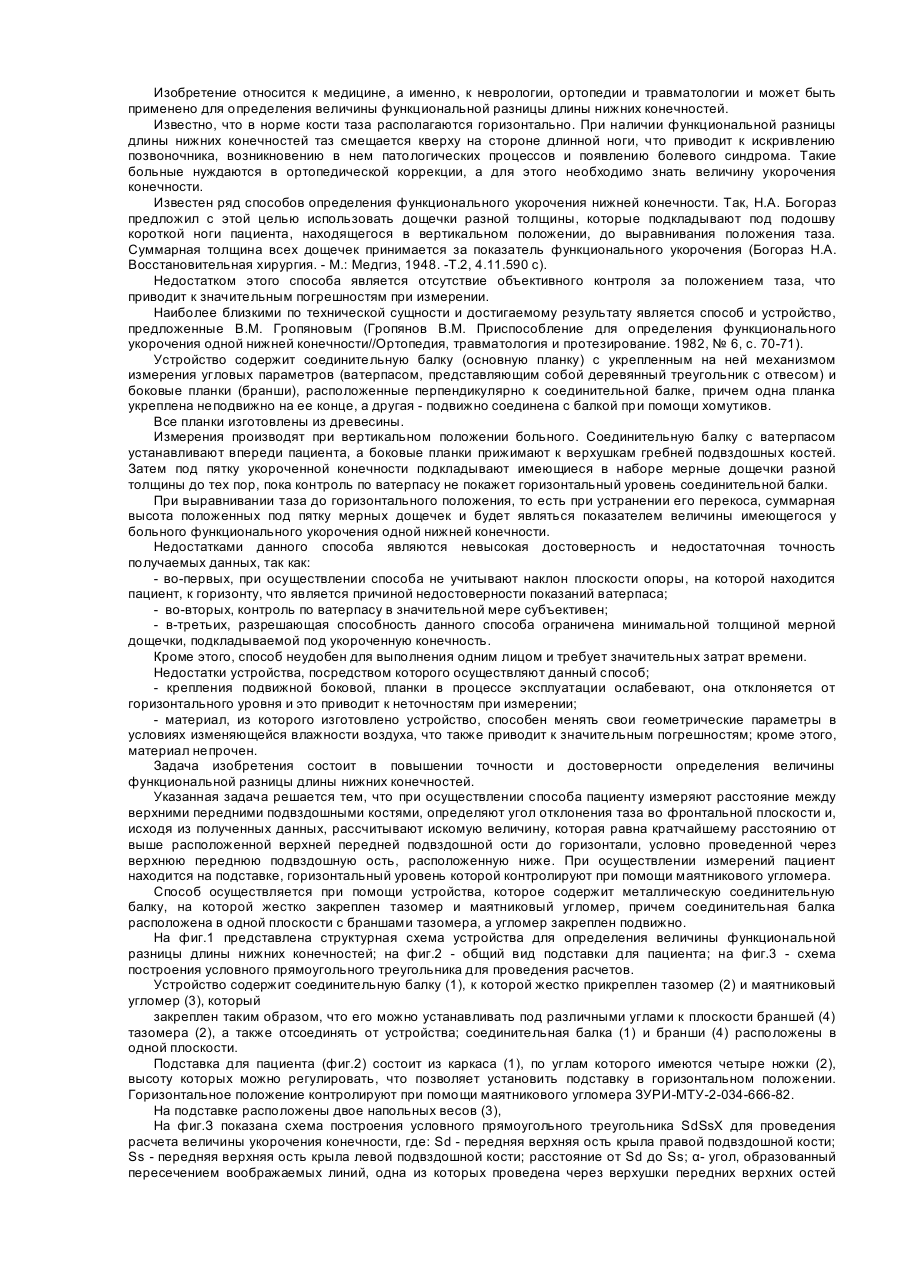
1. Способ определения величины функциональной разницы длины нижних конечностей путем помещения пациента на горизонтальную поверхность и антропометрии, отличающийся тем, что измеряют расстояние d между верхними передними подвздощными остями, угол отклонения таза а во фронтальной плоскости и по формуле h = d·sinа рассчитывают искомую величину, соответствующую кратчайшему расстоянию Ь от выше расположенной верхней передней...
Спосіб автоматичного управління процесом сгущення та пристрій для його здійснення
Номер патенту: 3190
Опубліковано: 26.12.1994
Автори: Кіпа Володимир Кіндратович, Ульшин Віталій Олександрович, Золотарьов Олександр Іванович, Лопаєнко Олексій Федорович
МПК: B01D 21/00
Мітки: пристрій, здійснення, управління, процесом, спосіб, сгущення, автоматичного
Формула / Реферат:
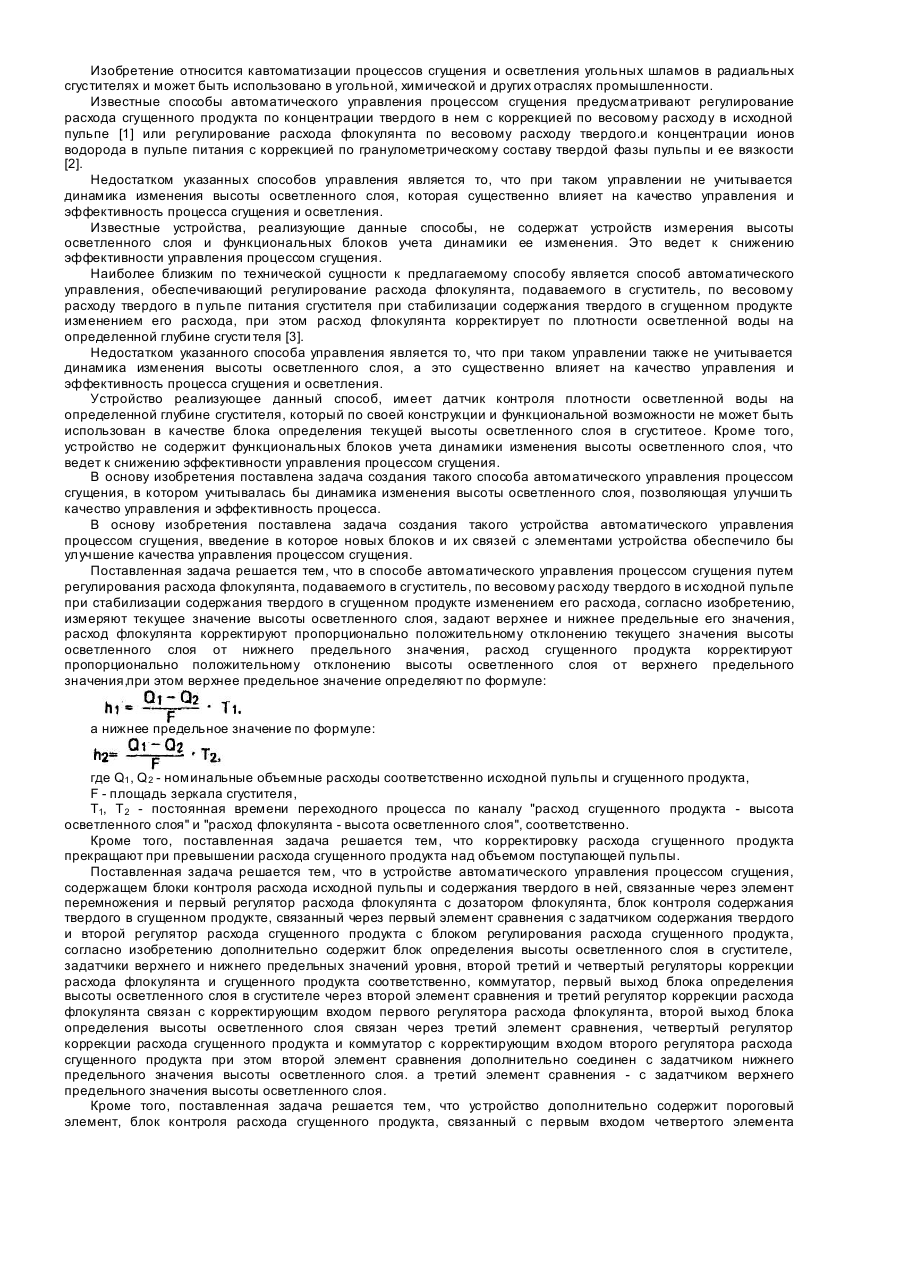
1. Способ автоматического управления процессом сгущения путем регулирования расхода флокулянта, подаваемого в сгуститель, по весовому расходу твердого в исходной пульпе при стабилизации содержания твердого в сгущенном продукте изменением его расхода, отличающийся тем, что измеряют текущее значение высоты осветленного слоя, задают верхнее и нижнее предельные его значения, расход флокулянта корректируют пропорционально положительному отклонению...
Спосіб автоматичного управління тривалістю електрохімічного травлення та пристрій для його здійснення
Номер патенту: 12732
Опубліковано: 28.02.1997
Автор: Піявський Роман Семенович
МПК: C25D 21/12
Мітки: електрохімічного, спосіб, пристрій, автоматичного, травлення, управління, тривалістю, здійснення
Текст:
...пассивного состояния, соединен со входом пуска реле времени, а выход, соответствую щий срыву пассивного состояния, соединен со входом сброса реле времени. 50 Надлежащее качество обработки (особый микрорельеф и отсутствие травильного шпама) обеспечивается при условии, что через некоторое время после включения тока обрабатываемая поверхность переходит в 55 пассивное состояние благодаря сдвигу ее потенциала в положительную сторону и...
Попередній патент: Плодознімальний засіб
Наступний патент: Спосіб приготування аутовакцини
Випадковий патент: Вафельні листи