Шестиступеневий стенд автотестування
Номер патенту: 44268
Опубліковано: 25.09.2009
Автори: Одокієнко Олександр Іванович, Вакулюк Олександр Вікторович, Матвієвський Олександр Миколайович, Матвієвський Микола Олександрович
Формула / Реферат
1. Шестиступеневий стенд автотестування, що містить основу платформи, на якій розміщені вузли механічного переміщення з приводами, які змінюють положення у просторі пересувного стола платформи, що несе корисне навантаження, блок керування приводами у складі пульта керування, обчислювального пристрою і керувального комп'ютера, а також датчики зворотного зв'язку, причому як приводи платформа містить приводи механічних переміщень, виконані у вигляді асинхронних електродвигунів з короткозамкненими роторами, пов'язаних з частотними перетворювачами і знижувальними редукторами з вихідними валами, а як датчики зворотного зв'язку платформа містить датчики кута повороту, виконані на основі магніточутливих мікросхем, який відрізняється тим, що пересувний стіл платформи виконаний з можливістю нахилу у поздовжньо-вертикальній і поперечно-вертикальній площинах, а також переміщення в горизонтальній площині, стенд автотестування містить шість вузлів механічного переміщення з приводами, що утворюють три пари, кожний знижувальний редуктор закріплений до основи платформи через шарнірне з'єднання, вихідні вали кожної з трьох пар знижувальних редукторів виконано з можливістю контакту за допомогою системи важелів, виконаної з можливістю зміни своєї довжини, з пересувним столом платформи через шарнірне з'єднання, при цьому шестиступеневий стенд автотестування містить щонайменше один амортизатор пружинного або пневматичного типу.
2. Шестиступеневий стенд автотестування за п. 1, який відрізняється тим, що зсередини основа платформи підкріплена поздовжніми і поперечними армуючими перемичками, наприклад прямокутного перерізу, що жорстко закріплені до бічної поверхні зовнішніх сторін основи платформи перпендикулярно їм і знаходяться з ними в одній горизонтальній площині, при цьому основа платформи виконана з можливістю горизонтального і вертикального переміщення, а пересувний стіл платформи виконаний з можливістю нахилу і переміщення у поздовжньо-вертикальній, поперечно-вертикальній і горизонтальній площинах по тангажу і крену від - 23° до + 23° щодо горизонтальної площини.
3. Шестиступеневий стенд автотестування за п. 1, який відрізняється тим, що система важелів виконана як кривошипно-шатунний механізм у вигляді послідовно з'єднаних водила, шатуна і повзуна, як амортизатори шестиступеневий стенд автотестування містить амортизатор, що розміщений по центру основи платформи або амортизатори, що розміщені безпосередньо на вузлах механічного переміщення, а як датчики зворотного зв'язку стенд містить відносні датчики кута повороту.
Текст
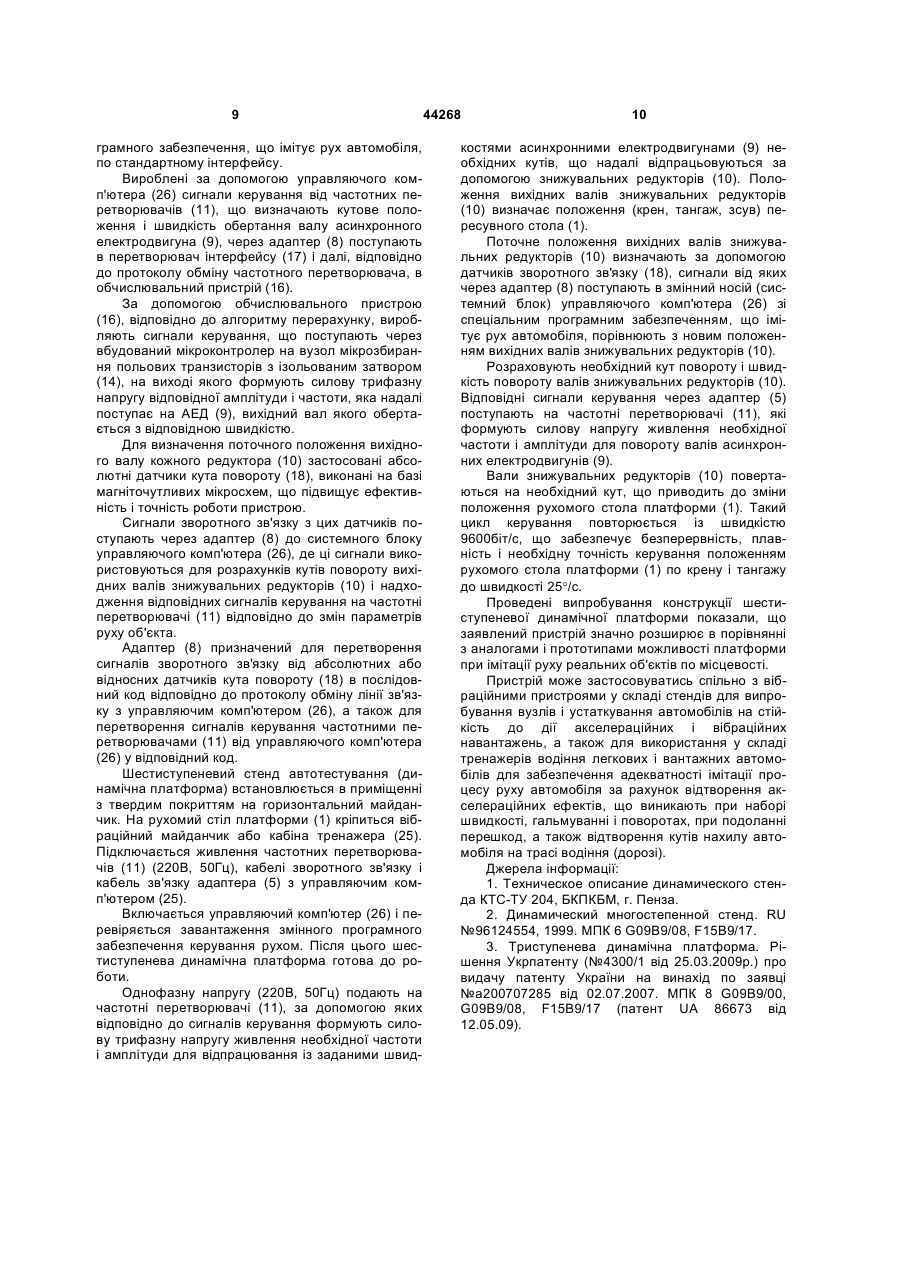
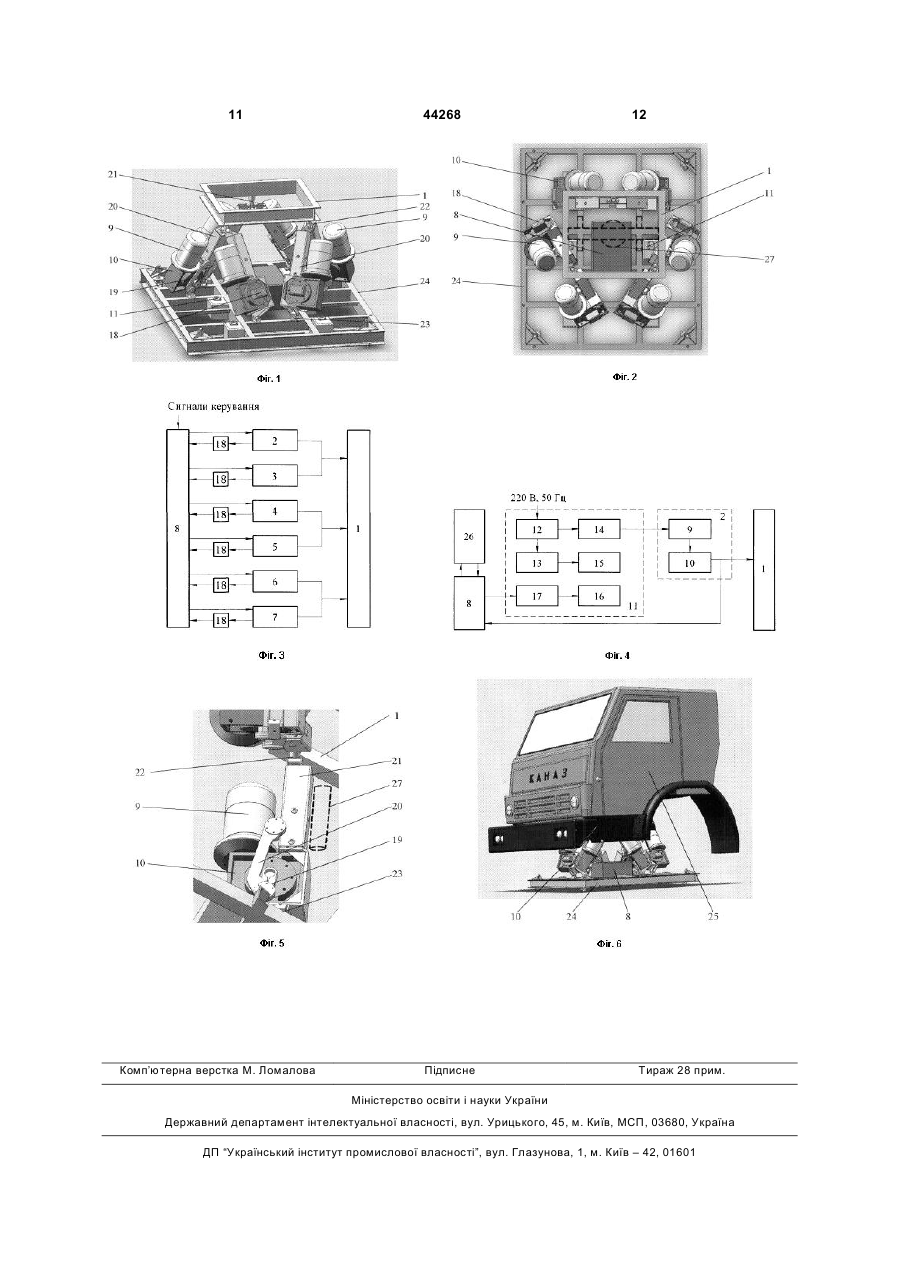
1. Шестиступеневий стенд автотестування, що містить основу платформи, на якій розміщені вузли механічного переміщення з приводами, які змінюють положення у просторі пересувного стола платформи, що несе корисне навантаження, блок керування приводами у складі пульта керування, обчислювального пристрою і керувального комп'ютера, а також датчики зворотного зв'язку, причому як приводи платформа містить приводи механічних переміщень, виконані у вигляді асинхронних електродвигунів з короткозамкненими роторами, пов'язаних з частотними перетворювачами і знижувальними редукторами з вихідними валами, а як датчики зворотного зв'язку платформа містить датчики кута повороту, виконані на основі магніточутливих мікросхем, який відрізняється тим, що пересувний стіл платформи виконаний з можливістю нахилу у поздовжньовертикальній і поперечно-вертикальній площинах, а також переміщення в горизонтальній площині, стенд автотестування містить шість вузлів механічного переміщення з приводами, що утворюють три пари, кожний знижувальний редуктор закріплений до основи платформи через шарнірне з'єд U 2 (11) 1 3 висунення і в комплекті з ним, гідропідсилювачем і електричною схемою керування, утворює слідкуючу систему, що відпрацьовує зовнішній заданий сигнал (наприклад, сигнал керування приводами по крену і тангажу) тренажером, що поступає з системи керування, і який забезпечує розкладання керуючих сигналів по координатах, відповідних кожному силовому циліндру. Недоліками відомого пристрою [1] є неможливість забезпечення високої якості регулювання положення стола платформи за мінімальний час внаслідок інерційності роботи силових циліндрів, необхідності постійної роботи гідронасосу, що створює необхідний робочий тиск гідравлічної рідини в гідроциліндрах, складності обслуговування і ремонту, а також чутливості до високих температур. Як аналог вибраний динамічний багатоступеневий, зокрема, триступеневий, стенд (далі стенд), що містить нерухому основу і рухомий стіл платформи з корисним навантаженням, джерело гідроживлення і гідроприводи, що виконують, зокрема, функцію амортизаторів і які змінюють положення платформи в просторі, при цьому кожний з гідроприводів має електричний вхід керування і складається з послідовно сполучених чутливого елементу, суматора, підсилювача потужності, гідропідсилювача і силового циліндра, причому електричний вхід керування підключений до другого входу суматора, вихід джерела гідроживлення - до другого входу гідропідсилювача, а вхід чутливого елементу пов'язаний з платформою, причому до складу кожного гідроприводу включений блок керування гідроприводами з пультом керування, в який введено обчислювальний пристрій і дві паралельно сполучені ланцюги, що складаються з детектора і керованого підсилювача-обмежувача, включені між суматором і підсилювачем потужності, причому детектори в паралельних ланцюгах мають різну полярність, а управляючі входи керованого підсилювача-обмежувача сполучені з виходом обчислювального пристрою, входи якого сполучені з виходами чутливих елементів гідроприводів, причому стенд містить також датчики зворотного зв'язку [2]. Недоліком пристрою аналога є неможливість забезпечення високої якості регулювання положення стола платформи за мінімальний час, зокрема в режимі швидкого реверсу, а також неможливість фіксації в певному положенні або стопоріння стола платформи при виключенні електроживлення, що може негативно вплинути на безпеку осіб, що навчаються. Як найбільш близький аналог (прототип) вибрана триступенева динамічна платформа, що містить нерухому основу, на якій розміщені три вузли переміщення з приводами, що змінюють положення у просторі пересувного стола платформи, що несе корисне навантаження, блок керування приводами у складі пульта керування, обчислювального пристрою і управляючого комп'ютера, а також датчики зворотного зв'язку, причому як приводи платформа містить приводи механічних переміщень, виконані у вигляді асинхронних електродвигунів з короткозамкненими роторами, пов'язаних з 44268 4 частотними перетворювачами і знижувальними редукторами, а як датчики зворотного зв'язку платформа містить абсолютні датчики кута повороту, виконані на основі магніточутливих мікросхем. До нижньої основи пересувного стола платформи жорстко прикріплені три шарнірні вузли кріплення, які сполучені з тягами, що пов'язані із знижувальними редукторами за допомогою важелів, як знижувальні редуктори платформа містить редуктори черв'ячного типу, а управляючий комп'ютер містить змінний носій з програмним забезпеченням, що імітує рух автомобіля [3]. Недоліком пристрою найбільш близького аналога є неможливість забезпечення високої якості відтворення усіх можливих положень пересувного (рухомого) стола платформи у просторі, що призводить до недостатнього імітування усіх можливих положень кабіни автомобіля при його русі, зокрема, при відтворенні акселераційних ефектів, що виникають при наборі швидкості, гальмуванні і поворотах, при подоланні перешкод, їзді по пересіченій місцевості, а також при відтворенні кутів нахилу автомобіля на трасі водіння (дорозі). Задачею корисної моделі є підвищення якості регулювання положення стола платформи в умовах динамічних акселераційних навантажень, що змінюються, включаючи імітування усіх можливих положень кабіни автомобіля при його русі, зокрема, при відтворенні акселераційних ефектів, що виникають при наборі швидкості, гальмуванні і поворотах, при подоланні перешкод, їзді по пересіченій місцевості, а також при відтворенні кутів нахилу автомобіля на трасі водіння (дорозі) шляхом введення додаткових елементів, нового конструктивного виконання окремих елементів платформи та їх взаєморозташування. Вказана задача досягається тим, що у шестиступеневому стенді автотестування, що містить основу платформи, на якій розміщені вузли механічного переміщення з приводами, які змінюють положення у просторі пересувного стола платформи, що несе корисне навантаження, блок керування приводами у складі пульта керування, обчислювального пристрою і керувального комп'ютера, а також датчики зворотного зв'язку, причому як приводи платформа містить приводи механічних переміщень, виконані у вигляді асинхронних електродвигунів з короткозамкненими роторами, пов'язаних з частотними перетворювачами і знижувальними редукторами з вихідними валами, а як датчики зворотного зв'язку платформа містить датчики кута повороту, виконані на основі магніточутливих мікросхем, новим є те, що, пересувний стіл платформи виконаний з можливістю нахилу у поздовжньо-вертикальній і поперечновертикальній площинах, а також переміщення в горизонтальній площині, стенд автотестування містить шість вузлів механічного переміщення з приводами, що утворюють три пари, кожний знижувальний редуктор закріплений до основи платформи через шарнірне з'єднання, вихідні вали кожної з трьох пар знижувальних редукторів виконано з можливістю контакту за допомого системи важелів, виконаної з можливістю зміни своєї довжини, з пересувним столом платформи через ша 5 рнірне з'єднання, при цьому шестиступеневий стенд автотестування містить щонайменше один амортизатор пружинного або пневматичного типу. Зсередини основа платформи підкріплена поздовжніми і поперечними армуючими перемичками, наприклад, прямокутного перерізу, що жорстко закріплені до бічної поверхні зовнішніх сторін основи платформи перпендикулярно ним і знаходяться з ними в одній горизонтальній площині, при цьому основа платформи виконана з можливістю горизонтального і вертикального переміщення, а пересувний стіл платформи виконаний з можливістю нахилу і переміщення у поздовжньовертикальній, поперечно-вертикальній і горизонтальній площинах по тангажу і крену від - 23° до +23° щодо горизонтальної площини. Система важелів виконана як кривошипношатунний механізм у вигляді послідовно з'єднаних водила, шатуна і повзуна, як амортизатори шестиступеневий стенд автотестування містить амортизатор, що розміщений по центру основи платформи, або амортизатори, що розміщені безпосередньо на вузлах механічного переміщення, а як датчики зворотного зв'язку стенд містить відносні датчики кута повороту. Перераховані ознаки пристрою складають сутність корисної моделі. Наявність причинно-наслідного зв'язку між сукупністю істотних ознак корисної моделі і технічним результатом, що досягається, полягає в наступному. Застосування механічних вузлів переміщення на основі асинхронних електродвигунів з короткозамкненим ротором і знижувальними черв'ячними редукторами забезпечує підвищення швидкості і якості регулювання положення стола платформи в умовах динамічних навантажень, що змінюються, а також підвищення безпеки осіб, що навчаються. Механізм приводу стола платформи виконаний як система (блок) змінної довжини, з'єднаний верхньою частиною зі столом платформи через шарнірний вузол. Нижня частина цієї системи (блоку) приєднана до нижньої рами також через шарнірний вузол. Для зміни довжини системи (блоку) важелів застосований кривошипношатунний механізм, який перетворює обертовий рух валу черв'ячного мотор-редуктора (знижувального редуктора) у зворотньо-поступовий рух повзуна. Для розвантаження мотор-редукторів (знижувальних редукторів) при роботі з корисним навантаженням великої ваги в пристрої застосовується пневматичний або пружинний (в залежності від ваги корисного навантаження) амортизатор (розвантажувач), який працює в усьому діапазоні переміщень рухомого (пересувного) стола платформи. Або, як варіант, використовуються амортизатори, що розміщені безпосередньо на вузлах механічного переміщення. Це сприяє плавності роботи стенду. Як приводи вузлів переміщення застосовані асинхронні електродвигуни (АЕД) з короткозамкненим ротором, що дає можливість управляти швидкістю і напрямом обертання валу електродвигуна, а також його положенням у момент за 44268 6 планованої або незапланованої зупинки шляхом зміни частоти і амплітуди живлячої трифазної напруги (220В, 50Гц; 380В, 50Гц). Керована зміна частоти і амплітуди живлячої трифазної напруги проводиться з використанням частотних перетворювачів, що забезпечують за рахунок плавної зміни частоти і амплітуди безступінчасте регулювання швидкості двигуна, а отже, керований розгін, гальмування і реверсування. Зміна частоти і амплітуди живлячої напруги дозволяє змінювати швидкість обертання АЕД від «0» (зупинка) до номінальної, а також підтримувати номінальний момент на валу електродвигуна у всьому діапазоні регулювання швидкості обертання, тобто забезпечувати високі пускові моменти без пускових кидків струму. Вищезазначене виконання усіх конструктивних елементів стенду сприяє імітуванню усіх можливих положень кабіни автомобіля при його русі, зокрема, при відтворенні акселераційних ефектів, які виникають при наборі швидкості, гальмуванні і поворотах, при подоланні перешкод, їзді по пересіченій місцевості, а також при відтворенні кутів нахилу автомобіля на трасі водіння (дорозі). Керування положенням вихідного валу кожного реверсивного АЕД здійснюється з використанням датчиків зворотного зв'язку, в якості яких використані як абсолютні, так і відносні датчики кута повороту, виконані на основі (на базі) магніточутливих мікросхем, що підвищує стабільність, точність і ефективність роботи пристрою. Сигнали від датчиків зворотного зв'язку, відповідні поточному кутовому положенню вихідних валів мотор-редукторів, у цифровому вигляді поступають для обробки в обчислювальний пристрій комп'ютера, що управляє, по стандартному інтерфейсу. Поточне кутове положення вихідних валів мотор-редукторів порівнюють за допомогою обчислювального пристрою комп'ютера, що управляє, і який містить змінний носій з програмним забезпеченням, що імітує рух автомобіля, із заданими кутами повороту, після чого розраховують величину необхідного кута повороту вихідного валу кожного мотор-редуктора. Цю величину перетворюють відповідно до протоколу обміну і подають на частотні перетворювачі, за допомогою яких подають на АЕД трифазну напругу необхідної частоти і амплітуди. У свою чергу те, що управляючий комп'ютер містить змінний носій зі спеціальним програмним забезпеченням, яке імітує рух автомобіля, забезпечує універсальність і автономність роботи пристрою при зміні або удосконаленні програмного забезпечення відповідно до вимог поточних завдань. Пристрій динамічної шестиступеневої платформи пояснюється Фіг.1-6, де: на Фіг.1 показана схема стенду автотестування збоку; на Фіг.2 показана схема стенду автотестування зверху; на Фіг.3 показана структурна схема стенду автотестування; на Фіг.4 показана структурна схема одного ка 7 налу (із шістьох) керування стенду автотестування; на Фіг.5 показана конструкція кріплення приводів стенду автотестування; на Фіг.6 показано шестиступеневий стенд автотестування спільно з кабіною тренажера автомобіля. На Фіг.1-6 прийняті наступні позначення: 1 - пересувний (рухомий) стіл платформи стенду автотестування; 2, 3, 4, 5, 6, 7 - вузли (блоки) механічного переміщення; 8 - адаптер платформи; 9 - асинхронний електродвигун (АЕД); 10 - знижувальний редуктор (мотор-редуктор); 11 - частотний перетворювач; 12 - випрямляч; 13 - блок живлення; 14 - вузол мікрозбирання біполярних польових транзисторів з ізольованим затвором; 15 - мікроконтролер; 16 - обчислювальний пристрій; 17 - перетворювач інтерфейсу; 18 - абсолютний або відносний датчик кутових переміщень (датчик зворотного зв'язку); 19 - водило; 20 - шатун; 21 - повзун; 22 - вузол шарнірного кріплення системи (блоку) механічного переміщення до пересувного (рухомого) стола платформи; 23 - вузол шарнірного кріплення блоку механічного переміщення до нижньої рами платформи; 24 - нижня рама платформи (основа платформи) стенду автотестування; 25 - корисне навантаження (кабіна тренажера з особою, що навчається); 26 - управляючий комп'ютер; 27 - розвантажувач (амортизатор) (показаний пунктиром); Пропонований шестиступеневий стенд автотестування (див. Фіг.1-6) є основою платформи (24), на якій розміщені шість частотних перетворювачів (11), блок адаптера платформи (8), шість блоків механічного переміщення (2), (3), (4), (5), (6), (7), кожний з яких включає асинхронний електродвигун - АЕД (9), знижувальний редуктор або мотор-редуктор (10), а також систему важелів у формі кривошипно-шатунного механізму, виконаного у вигляді послідовно з'єднаних водила (19), шатуна (20) і повзуна (21). Зсередини основа платформи підкріплена, наприклад, двома поздовжніми і чотирма поперечними армуючими перемичками, наприклад, прямокутного перетину, що жорстко закріплені до бічної поверхні зовнішніх сторін основи платформи перпендикулярно ним і знаходяться з ними в одній горизонтальній площині, при цьому основа платформи виконана з можливістю горизонтального і вертикального переміщення. Рухома частина платформи, а саме пересувний стіл (1), кріпиться до повзунів (21) за допомогою трьох верхніх шарнірних вузлів (22), тобто верхні торці трьох пар повзунів (21) кріпляться попарно до трьох верхніх шарнірних вузлів (22). До 44268 8 нижньої рами (24) мотор-редуктори (10) кріпляться з допомогою шести нижніх шарнірних вузлів (23). Обертальний рух валу АЕД (9) за допомогою знижувального редуктора (10), водила (19), шатуна (20) і повзуна (21) перетворюється в зворотнопоступальний рух, що використовується для зміни положення стола (1) платформи в просторі. Шарнірні конструкції кріплення (22), (23) забезпечують нахил (переміщення) рухомого стола платформи (1) у поздовжньо-вертикальній, поперечновертикальній і горизонтальній площинах. Кути нахилу рухомого (пересувного) стола платформи (1) визначаються геометричними розмірами водил (19) і вибираються з умови забезпечення заданих кутів нахилу в поздовжньовертикальній і поперечно-вертикальній площинах, а також припустимого навантаження на водила (19), шатуни (20) і повзуни (21). Для зниження навантаження на водила (19), шатуни (20), повзуни (21) і знижувальні редуктори (10) при роботі з корисним навантаженням (25) вагою понад 800кг у пристрої застосовані амортизатори пружинного або пневматичного типу (27), які працюють на стиснення при опусканні площини пересувного (рухомого) стола платформи (1). Амортизатор (27) може бути встановлений по центру платформи (штрихова лінія на Фіг.2) або, як варіант, використовуються шість однакових амортизаторів (штрихова лінія на Фіг.5), що встановлюються безпосередньо на вузлі (блоці) механічного переміщення. Тип передачі знижувального редуктора (10) черв'ячний, що у разі припинення керування асинхронними електродвигунами (9) забезпечує збереження положення пересувного (рухомого) стола (1) платформи в положенні, яке він займав до припинення керування. Таке виконання передачі знижувального редуктора (10) підвищує рівень безпеки осіб, що навчаються, і які знаходяться в кабіні (25), розміщеній на пересувному (рухомому) столі (1), у випадках виникнення аварійних ситуацій (виключення зовнішнього електроживлення, виходу з ладу частотних перетворювачів (11), збоїв в роботі управляючого комп'ютера (26). Розміри водил (19), геометричне положення знижувальних редукторів (10) і локальних місць (трьох точок) кріплення повзунів (21) до пересувного (рухомого) стола (1) вибрані з умови забезпечення кутів нахилу в поздовжньо-вертикальній площині (тангаж) і в поперечно-вертикальній площині (крен) від -23° до +23° щодо горизонтального положення. Передавальне число знижувальних редукторів (10) вибрано з умови забезпечення максимальної швидкості зміни положення стола (1) платформи по тангажу і крену 25°/с. Керування АЕД (9), а саме кутом і швидкістю повороту валу кожного двигуна, в процесі навчання здійснюється за рахунок зміни частоти і амплітуди живлячої напруги (220В, 50Гц), яка формується відповідно до алгоритму роботи частотних перетворювачів (11), керованих сигналами від програми руху об'єкту за допомогою управляючого комп'ютера (26). Керування частотними перетворювачами (11) здійснюється за допомогою про 9 грамного забезпечення, що імітує рух автомобіля, по стандартному інтерфейсу. Вироблені за допомогою управляючого комп'ютера (26) сигнали керування від частотних перетворювачів (11), що визначають кутове положення і швидкість обертання валу асинхронного електродвигуна (9), через адаптер (8) поступають в перетворювач інтерфейсу (17) і далі, відповідно до протоколу обміну частотного перетворювача, в обчислювальний пристрій (16). За допомогою обчислювального пристрою (16), відповідно до алгоритму перерахунку, виробляють сигнали керування, що поступають через вбудований мікроконтролер на вузол мікрозбирання польових транзисторів з ізольованим затвором (14), на виході якого формують силову трифазну напругу відповідної амплітуди і частоти, яка надалі поступає на АЕД (9), вихідний вал якого обертається з відповідною швидкістю. Для визначення поточного положення вихідного валу кожного редуктора (10) застосовані абсолютні датчики кута повороту (18), виконані на базі магніточутливих мікросхем, що підвищує ефективність і точність роботи пристрою. Сигнали зворотного зв'язку з цих датчиків поступають через адаптер (8) до системного блоку управляючого комп'ютера (26), де ці сигнали використовуються для розрахунків кутів повороту вихідних валів знижувальних редукторів (10) і надходження відповідних сигналів керування на частотні перетворювачі (11) відповідно до змін параметрів руху об'єкта. Адаптер (8) призначений для перетворення сигналів зворотного зв'язку від абсолютних або відносних датчиків кута повороту (18) в послідовний код відповідно до протоколу обміну лінії зв'язку з управляючим комп'ютером (26), а також для перетворення сигналів керування частотними перетворювачами (11) від управляючого комп'ютера (26) у відповідний код. Шестиступеневий стенд автотестування (динамічна платформа) встановлюється в приміщенні з твердим покриттям на горизонтальний майданчик. На рухомий стіл платформи (1) кріпиться вібраційний майданчик або кабіна тренажера (25). Підключається живлення частотних перетворювачів (11) (220В, 50Гц), кабелі зворотного зв'язку і кабель зв'язку адаптера (5) з управляючим комп'ютером (25). Включається управляючий комп'ютер (26) і перевіряється завантаження змінного програмного забезпечення керування рухом. Після цього шестиступенева динамічна платформа готова до роботи. Однофазну напругу (220В, 50Гц) подають на частотні перетворювачі (11), за допомогою яких відповідно до сигналів керування формують силову трифазну напругу живлення необхідної частоти і амплітуди для відпрацювання із заданими швид 44268 10 костями асинхронними електродвигунами (9) необхідних кутів, що надалі відпрацьовуються за допомогою знижувальних редукторів (10). Положення вихідних валів знижувальних редукторів (10) визначає положення (крен, тангаж, зсув) пересувного стола (1). Поточне положення вихідних валів знижувальних редукторів (10) визначають за допомогою датчиків зворотного зв'язку (18), сигнали від яких через адаптер (8) поступають в змінний носій (системний блок) управляючого комп'ютера (26) зі спеціальним програмним забезпеченням, що імітує рух автомобіля, порівнюють з новим положенням вихідних валів знижувальних редукторів (10). Розраховують необхідний кут повороту і швидкість повороту валів знижувальних редукторів (10). Відповідні сигнали керування через адаптер (5) поступають на частотні перетворювачі (11), які формують силову напругу живлення необхідної частоти і амплітуди для повороту валів асинхронних електродвигунів (9). Вали знижувальних редукторів (10) повертаються на необхідний кут, що приводить до зміни положення рухомого стола платформи (1). Такий цикл керування повторюється із швидкістю 9600біт/с, що забезпечує безперервність, плавність і необхідну точність керування положенням рухомого стола платформи (1) по крену і тангажу до швидкості 25°/с. Проведені випробування конструкції шестиступеневої динамічної платформи показали, що заявлений пристрій значно розширює в порівнянні з аналогами і прототипами можливості платформи при імітації руху реальних об'єктів по місцевості. Пристрій може застосовуватись спільно з вібраційними пристроями у складі стендів для випробування вузлів і устаткування автомобілів на стійкість до дії акселераційних і вібраційних навантажень, а також для використання у складі тренажерів водіння легкових і вантажних автомобілів для забезпечення адекватності імітації процесу руху автомобіля за рахунок відтворення акселераційних ефектів, що виникають при наборі швидкості, гальмуванні і поворотах, при подоланні перешкод, а також відтворення кутів нахилу автомобіля на трасі водіння (дорозі). Джерела інформації: 1. Техническое описание динамического стенда КТС-ТУ 204, БКПКБМ, г. Пенза. 2. Динамический многостепенной стенд. RU №96124554, 1999. МПК 6 G09B9/08, F15B9/17. 3. Триступенева динамічна платформа. Рішення Укрпатенту (№4300/1 від 25.03.2009р.) про видачу патенту України на винахід по заявці №а200707285 від 02.07.2007. МПК 8 G09B9/00, G09B9/08, F15B9/17 (патент UA 86673 від 12.05.09). 11 Комп’ютерна верстка М. Ломалова 44268 Підписне 12 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSix-stage testbench for auto-testing
Автори англійськоюMatvievskyi Oleksandr Mykolaiovych, Matvievskyi Mykola Oleksandrovych, Vakuliuk Oleksandr Viktorovych, Odokienko Oleksandr Ivanovych
Назва патенту російськоюШестиступенчатый стенд автотестирования
Автори російськоюМатвиевский Александр Николаевич, Матвиевский Николай Александрович, Вакулюк Александр Викторович, Одокиенко Александр Иванович
МПК / Мітки
Мітки: автотестування, стенд, шестиступеневий
Код посилання
<a href="https://ua.patents.su/6-44268-shestistupenevijj-stend-avtotestuvannya.html" target="_blank" rel="follow" title="База патентів України">Шестиступеневий стенд автотестування</a>
Стенд для дослідження елементів стрічкового конвеєра
Номер патенту: 24781
Опубліковано: 10.07.2007
Автори: Кузьменко Володимир Іванович, Доброногова Вікторія Юріївна, Сурело Володимир Олександрович
МПК: B65G 15/00
Мітки: елементів, конвеєра, стенд, стрічкового, дослідження
Формула / Реферат:
Стенд для дослідження елементів стрічкового конвеєра, що містить раму, встановлений на ній вантажонесучий орган, привідний і натяжний барабани, які огинає стрічка, робоча гілка якої розташована на роликах, який відрізняється тим, що вантажонесучий орган виконаний у вигляді платформи з бортами, і на її днищі закріплені ролики, які взаємодіють з робочою гілкою стрічки, а на верхніх горизонтальних балках рами і подовжніх бортах платформи на...
Стенд для градуювання акселерометрів
Номер патенту: 84801
Опубліковано: 25.11.2008
Автори: Маршавка Ірина Олексіївна, Троценко Олександр Володимирович
МПК: G01P 21/00
Мітки: акселерометрів, стенд, градуювання
Формула / Реферат:
Стенд для градуювання акселерометрів, який містить робочу платформу, яка обертається навколо взаємно перпендикулярних осей, і змонтований на ній вал, на якому закріплені вантажі симетрично відносно осі обертання платформи, який відрізняється тим, що вантажі виконані у вигляді площинних лопаток, закріплених на валу з можливістю повороту і фіксації навколо осей, перпендикулярних осі вала.
Ексцентриковий вібраційний стенд для дослідження надійності кріплення різьбових з’єднань
Номер патенту: 31620
Опубліковано: 10.04.2008
Автори: Михайлович Ярослав Миколайович, Рубець Андрій Миколайович
МПК: G01M 7/00
Мітки: кріплення, ексцентриковий, різьбових, надійності, вібраційний, дослідження, з'єднань, стенд
Формула / Реферат:
Ексцентриковий вібраційний стенд для дослідження надійності кріплення різьбових з'єднань, що містить фундаментну плиту, платформу з опорними підшипниками, ексцентрик з опорними підшипниками, електродвигун та муфту, який відрізняється тим, що платформа шарнірно закріплена на власній горизонтально розміщеній осі, з можливістю отримання коливального руху у вертикальному та залежному від нього горизонтальному напрямках та регулювання амплітуди...
Стенд для дослідження характеристик висівних апаратів
Номер патенту: 31727
Опубліковано: 25.04.2008
Автори: Чвартацький Ігор Іванович, Чвартацький Роман Ігорович, Павлиський Василь Михайлович, Гевко Іван Богданович
МПК: B65G 33/00
Мітки: дослідження, висівних, характеристик, апаратів, стенд
Формула / Реферат:
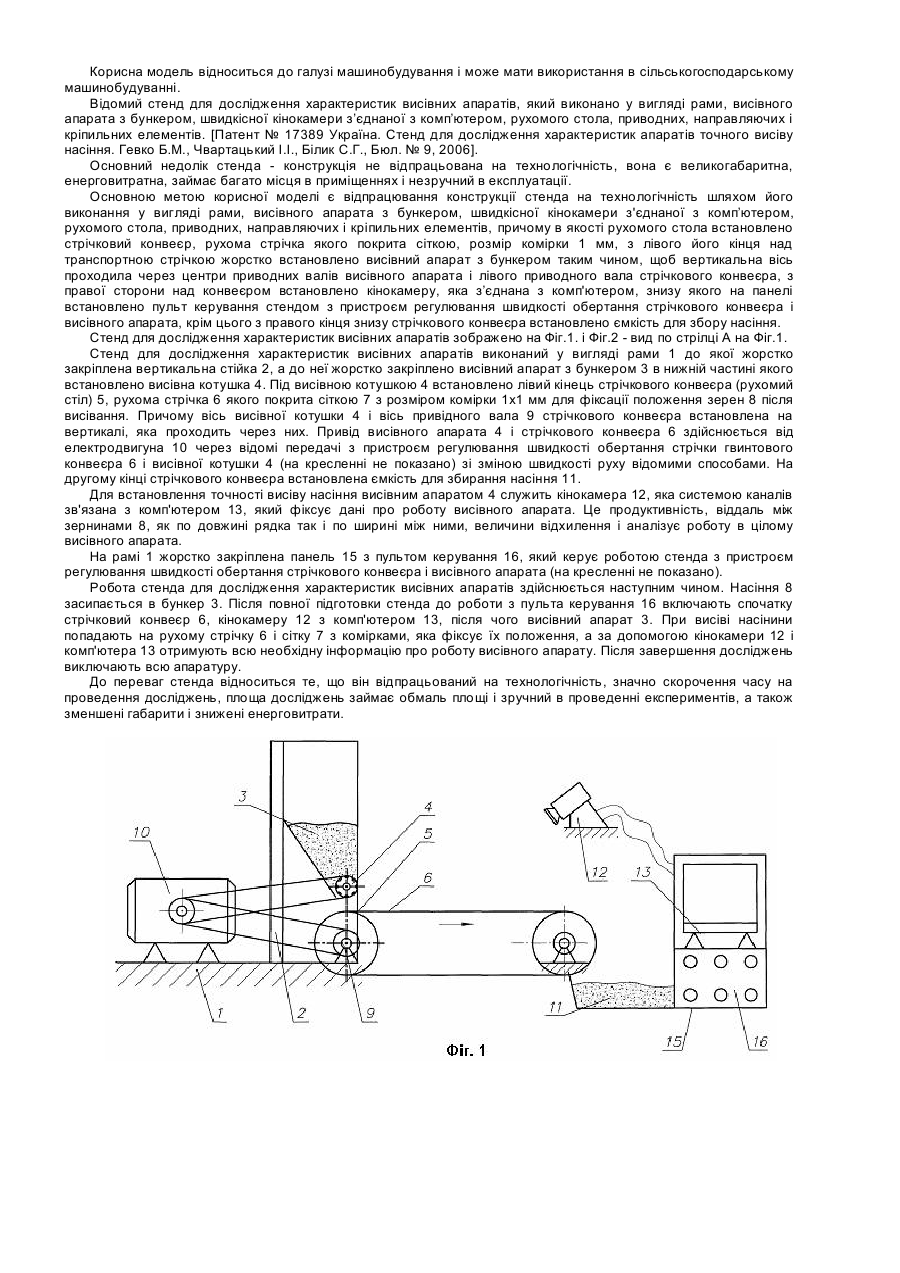
Стенд для дослідження характеристик висівних апаратів, який виконано у вигляді рами, висівного апарата з бункером, швидкісної кінокамери, з'єднаної з комп'ютером, рухомого стола, привідних, напрямних і кріпильних елементів, який відрізняється тим, що як рухомий стіл встановлено стрічковий конвеєр, рухома стрічка якого покрита сіткою, розмір комірки якої 11 мм, з лівого...
Стенд самохідний для розливання сталі

Номер патенту: 43221
Опубліковано: 10.08.2009
Автори: Копачевський Максим Анатолійович, Мацафей Анатолій Вікторович
МПК: B22D 11/10
Мітки: стенд, розливання, сталі, самохідний
Формула / Реферат:
1. Стенд самохідний для розливання сталі, що містить ходову раму, установлену на опорні приводні балансири, на якій розміщена платформа з кареткою, що переміщується, який відрізняється тим, що стенд оснащений механізмом підйому ковша, виконаним у вигляді гвинтів, кожний з яких установлений в стакані і взаємодіє із зубчатими колесами черв'ячно-гвинтових редукторів, закріплених до платформи, при цьому на гвинти, через сферичні підп'ятники, у...
Попередній патент: Спосіб автоматичного керування процесом обробки
Наступний патент: Виконавчий пристрій установки для виготовлення, наповнення і герметизації пакетів з термопластичної плівки
Випадковий патент: Спосіб моделювання міхурово-сечовідного рефлюксу