Спосіб моніторингу зображення аеродромних вогнів в атмосферному аерозолі
Номер патенту: 44846
Опубліковано: 12.10.2009
Автори: Тачиніна Олена Миколаївна, Попов Петро Васильович, Казак Василь Миколайович



Формула / Реферат
Спосіб моніторингу зображення аеродромних світлосигнальних вогнів в атмосферному аерозолі, в якому використовують промені аеродромних світлосигнальних вогнів і одну телевізійну камеру, з екрану якої зображення аеродромних вогнів надходить у блок обробки розподілу освітлення, в якому його обробляють і порівнюють з еталонним значенням розподілу освітлення, який відрізняється тим, що на земній поверхні встановлюють оптичні датчики, що захищені від прямих променів від аеродромних вогнів, які спрямовують і фокусують в просторову зону, що є близькою до висоти прийняття рішення про посадку повітряного судна для відповідних метеорологічних умов польотів, кількість яких є достатньою для аналізу і побудови зображення світлосигнальної системи шляхом оберненого світлорозсіювання від крапель атмосферного аерозолю з відповідної просторової зони, при цьому світлочутливі елементи датчиків фіксують світлорозподіл від променів аерозольного світлорозсіювання аеродромних вогнів і спрямовують сигнал до електронної обчислювальної машини, де датчики аналізують інформацію і будують зображення світлосигнальної системи, яке еквівалентне реальному зображенню в просторовій зоні, яку спостерігають пілоти на висоті прийняття рішення, і на основі просторової інформації від цього зображення у реальному часі приймають рішення про дозвіл на посадку або відмову від посадки повітряного судна.
Текст
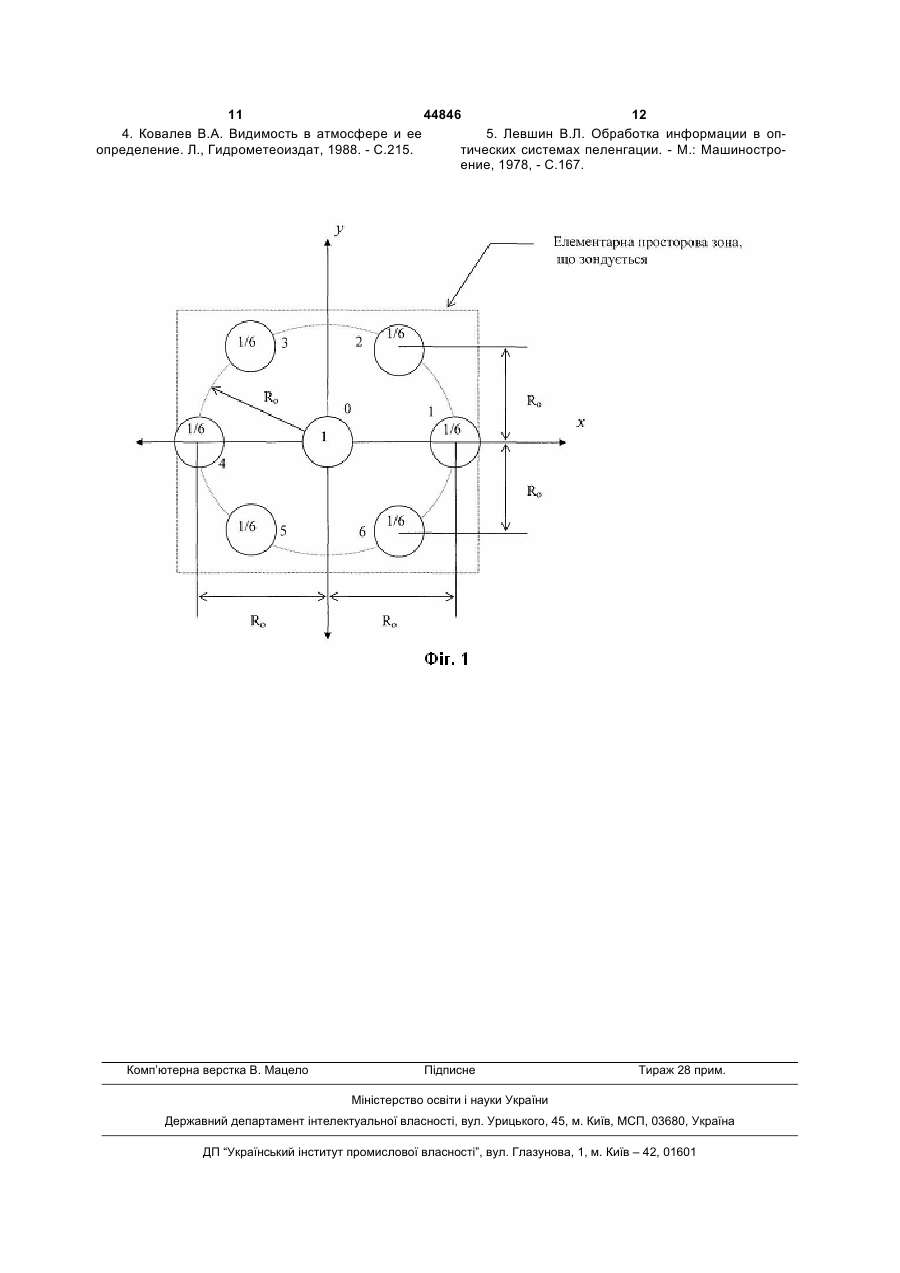
Спосіб моніторингу зображення аеродромних світлосигнальних вогнів в атмосферному аерозолі, в якому використовують промені аеродромних світлосигнальних вогнів і одну телевізійну камеру, з екрану якої зображення аеродромних вогнів надходить у блок обробки розподілу освітлення, в якому його обробляють і порівнюють з еталонним значенням розподілу освітлення, який відрізняється тим, що на земній поверхні встановлюють оптичні датчики, що захищені від прямих променів від аеродромних вогнів, які спрямовують і фокусу 3 44846 4 розраховує діаграми розподілу світла від аерообчислювальна машина при моніторингу аеродромних вогнів у горизонтальному та вертикальдромних вогнів у просторовій зоні, близькій до виному напрямку. соти прийняття рішення, еквівалентне реальному Технічна реалізація даного способу є складзображенню аеродромних вогнів в тій же простоною та витратною задачею, так як встановлення у ровій зоні, що спостерігають пілоти під час викостаціонарному режимі напівпрозорого і великоганання посадки в складних метеорологічних умобаритного екрану в зоні підходу на посадку повітвах. ряного судна не є можливим. Тому, екран повинен Тут і надалі терміном «оберненого світлорозбути рухомим і встановлюватися під час здійсненсіяння» позначена властивість крапель щільного ня виміру та за відсутності повітряного судна, що атмосферного аерозолю виконувати аналогічні здійснює посадку. функції напівпрозорого екрану відомого способу Операція встановлення екрану та вимірюван[3], але є природним та більш ефективним сереня розподілу освітлення на його поверхні, що довищем для проведення всіх необхідних світлостворюють аеродромні світлосигнальні вогні є нетехнічних вимірювань у будь-якій просторовій зоні, раціональною, так як моніторинг стану зображення що використовується при посадці повітряних сувогнів є перервний у часі і інформація від такої ден з використанням пілотами засобів аеродромсистеми для екіпажу повітряного судна під час них світлосигнальних систем. виконання посадки в складних метеорологічних Моніторинг зображення аеродромних світлоумовах не є актуальною. сигнальних вогнів в атмосферному аерозолі викоКрім того, використання даного способу вимінують шляхом встановлення на земній поверхні рювання зображення аеродромних вогнів не є дооптичних датчиків, які спрямовують і фокусують в стовірним для пілотів, які знаходяться в різних просторову зону, що є близькою до висоти прийнпросторових координатах з екраном. яття рішення про посадку для відповідних метеоВ основу корисної моделі поставлена задача: рологічних умов польотів, кількість яких є достату спосіб моніторингу зображення аеродромних ньою для аналізу і побудови зображення світлосигнальних вогнів в атмосферному аерозолі світлосигнальної системи за рахунок оберненого вводять оптичні датчики, які встановлюють на зесвітлорозсіювання від крапель атмосферного аемній поверхні та спрямовані і сфокусовані в просрозолю з відповідної просторової зони, це зобраторову зону, що є близькою до висоти прийняття ження є еквівалентним зображенню, яке спостерірішення про посадку для відповідних метеорологігають пілоти і на основі просторової інформації чних умов польотів і, за рахунок оберненого світприймають рішення про посадку або відмову від лорозсіювання від крапель атмосферного аерозопосадки повітряних суден. При цьому, по встановлю з відповідної просторової зони, датчики леним правилам, оцінку про відповідність отримафіксують світлорозподіл від аеродромних вогнів та ного зображення світлосигнальних вогнів встановспрямовують сигнал до електронноленим нормам дає диспетчер посадки. Диспетчер обчислювальної машини, яка аналізує інформацію посадки заздалегідь приймає рішення про можливід датчиків і далі, відповідним чином, будує зовість або неспроможність проведення пілотом браження світлосигнальної системи, що еквівалепросторової орієнтації і посадки в цих умовах і на нтно її зображенню в просторовій зоні, яку спостеоснові реального стану зображення світлосигнарігають пілоти і на основі просторової інформації льних вогнів, а також відповідності цього зобравід цього зображення приймають рішення про поження встановленим нормам він дає згоду, або садку або відмову від посадки повітряних суден. відмовляє екіпажу повітряного судна в здійсненні Поставлена задача вирішується тим, що в посадки у реальному часі. Встановлення такої способі моніторингу зображення аеродромних світехнології проведення посадки забезпечує гарантлосигнальних вогнів в атмосферному аерозолі, в товану безпеку польотів і зменшує ризик попаданякому використовують проміння аеродромних свіня екіпажу повітряного судна в особливу ситуацію, тлосигнальних вогнів і одну телевізійну камеру, з що пов'язана з складністю просторової орієнтації і екрану якої зображення аеродромних вогнів подефіцитом часу під час виконання посадки в скластупає у блок обробки розподілу освітлення, в дних метеорологічних умовах. якому його обробляють і порівнюють з еталонним Крім того, згідно з корисною моделлю стає значенням розподілу освітлення, спосіб згідно з можливим експериментально отримати властикорисною моделлю відрізняється тим, що на земвість і спроможність різних типів світлосигнальних ній поверхні встановлюють оптичні датчики, що систем, з різними топологічними та світлотехнічзахищені від прямих променів від аеродромних ними характеристиками, забезпечувати просторовогнів, і які спрямовують і фокусують в просторову ву орієнтацію пілота в складних метеорологічних зону, що є близькою до висоти прийняття рішення умовах під час посадки повітряного судна, а також про посадку повітряного судна для відповідних створювати просторові комп'ютерні моделі при метеорологічних умов польотів, використовується проектуванні нових світлосигнальних систем, що відомий з теорії видимості в атмосфері і практики адаптуються до метеоумов, які раптово змінюютьсвітлових вимірів ефект оберненого світлорозсіюся у процесі зниження, крім того для використання вання від крапель щільного атмосферного аероцих моделей при побудові систем візуалізації золю, що рівномірно розподіляється в просторі складних метеорологічних умов у візуальних сисвідносно краплі під кутом 360° незалежно від кута, темах тренажерів літаків. під яким на краплю падають світлові промені від Заявлений спосіб здійснюється наступним чиаеродромних вогнів [4]. За рахунок цього ефекту ном. зображення, яке формує електронно 5 44846 6 На земну поверхню, в зоні розташування фунсистеми і визначення основних характеристик пекціональних груп аеродромних світлосигнальних рвинних датчиків отримали за допомогою наступвогнів наближення та зони приземлення, а саме них послідовних дії: біля кожного аеродромного вогню, встановлюють 1. Для сукупності N датчиків задаємо N-мірний оптичні датчики, які розташовують та сфокусують диференціальний закон разподілу енергетичної в просторову зону, що відповідає висоті прийняття яскравості в сусідніх точках атмосферного аерозорішення про посадку для відповідних метеорологілю, що зондується: чних умов, крім того, оптичну систему кожного да⎧ 1 N N ⎫ −N ⎡ ⎪ ⎪ −1 ⎤ 2 ⎥ exp ⎨− ∑ ∑ Qmn bmbn ⎬; (1) Wn (b ) = ( 2π ) 2 ⎢det K mn тчика захищають пристроєм, що не дозволяє фік2 ⎪ ⎪ ⎣ ⎦ m n =1 ⎩ ⎭ сувати прямі промені від аеродромних вогнів. При виникненні складних метеорологічних умов від Ad(K mn ) Q mn = , крапель атмосферного аерозолю, які знаходяться det K mn на висоті близькій до висоти прийняття рішення, де det||Кmn|| - детермінант кореляційної матривідбиваються промені аеродромних вогнів, які далі ці; Ad(Kmn) - ад'юнкта елемента mn матриці; Qmn потрапляють до оптичної системи кожного з датзворотна кореляційна матриця, bm, bn - енергетиччиків, де фіксують, перетворюють в електричні на яскравість елементарного об'єму атмосферного сигнали і далі, направляють до електронноаерозолю в двох рядом розташованих точках атобчислювальних машин, в якій її оброблюють, мосферного простору, що зондується. аналізують і по результатам цього аналізу будують Бімодальність макроструктури атмосферного зображення світлосигнальних вогнів, що відобрааерозолю реалізується за допомогою двох нормажається на екрані терміналу, який встановлено на льних законів розподілу, з математичними очікуробочому місті диспетчера посадки. Диспетчер ~ ~ посадки згідно з відповідним алгоритмом та вимованнями b1, b 2 і дисперсіями σ 2 і σ 2 : гами нормативних документів аналізує отримане b1 b2 зображення і ще до досягнення повітряним суд~ ⎤ ~ ⎤ ⎡ ⎡ 2⎥ ⎢ (b − b1) ⎢ (b − b2 )2 ⎥ , ном, що знижується, мінімальної висоти відходу на a1 a2 W (b ) = exp⎢− exp⎢− + ⎥ ⎥ (2) друге коло дає згоду або відмову на виконання 2πσb1 2πσb2 2σ2 ⎥ 2σ2 ⎢ ⎢ b1 ⎦ b2 ⎥ ⎣ ⎣ ⎦ посадки цим повітряним судном. де а1, а2 - амплітуда відбитих сигналів із двох Тут і надалі, згідно з затвердженими державпоруч розташованих просторових точок. ними і міжнародними нормативами, прийняття Кореляційна функція визначаємо: рішення про посадку в складних метеорологічних ⎧⎡ _ ~ _ ⎤ ⎡ _ ~ _ ⎤ ⎫ умовах розподілено між диспетчером посадки і _ _ ⎪ ⎪ K b (r1, r2 ) = M⎨⎢b(r1) − b (r1)⎥ − ⎢b(r2 ) − b (r )⎥ ⎬ , (3) пілотом, але пілот має право на остаточне рішен⎥⎪ ⎥ ⎢ ⎪⎢ ⎦⎭ ⎦ ⎣ ня, тому система, що побудована по способу за ⎩⎣ даною корисною моделлю на своєму виході покаде r1, r2 - радіус-вектор елементарного об'єму зує еквівалентне зображення світлосигнальних атмосферного аерозолю. вогнів для висот близьких до висоти прийняття 2. За допомогою перетворення Хінчина-Вінера рішення і також інформує диспетчера посадки про перейдемо від кореляційної функції до енергетичступінь ризику втрати екіпажем повітряного судна ного спектру у векторній формі, який має вигляд: просторової орієнтації під час посадки в режимі _ _ _ Gb ( ω) = ∫ K b ( ∆ r ) exp( − jϖ∆ r )dS _ реального часу. (4) r Спосіб моніторингу зображення аеродромних S_ r світлосигнальних вогнів в атмосферному аерозолі _ дозволяє завчасно отримувати диспетчером посаде S _ область на площині вектора r , що має дки і пілотом повітряного судна інформацію про r відповідність зображення аеродромних вогнів у нескінченну протяжність; просторовій зоні, яка є близькою до висоти прийнdS _ - елемент цієї області, ϖ - вектор просяття рішення про посадку, згідно з діючими нормаr тивними документами, у реальному часі, під час торової частоти. виконання посадки повітряним судном до мінімаПри організації сканування відбитого зобральної висоти відходу на друге коло, що дозволяє ження аеродромних вогнів у щільних шарах атмогарантовано забезпечити безпеку польотів за расферного аерозолю, і вирішенні задачі моніторинхунок виключення випадків втрати пілотом простогу, вирішуємо питання щодо кількості та місця рової орієнтації на заключних етапах пілотування розтушування оптичних датчиків на земній поверпри здійсненні посадки в складних метеорологічхні. З позиції точності апроксимації зображення них умовах. аеродромних вогнів, поряд з кожним аеродромним Приклад вогнем установлено декілька індивідуальних оптиУздовж вогнів аеродромної світлосигнальної чних датчиків. системи розташовано світлочутливі датчики, що 3. Для одиночного оптичного датчика у якості реєструють енергетичний спектр відбитого від атмоделі об'єкта сканування, можна записати двомімосферного аерозолю світла аеродромних вогнів. рну δ - функцію, яка має нескінченно малу площу Алгоритм побудови та аналізу відбитого атмооснови і нескінченно велику висоту: сферним аерозолем зображення світлосигнальної _ _ _ b( r ) = Jc δ( r − r o ), ⎧ _ _ _ ⎪∞ r = 0 ⎪ δ (r ) r = ⎨ ⎪ _ ⎪0 r ≠ 0 ⎩ _ _ ∫ _δ ( r )dSr_ = 1 Sr 7 44846 _ де ωr=| ω | - модуль вектору просторової щіль(5) _ де r0 - радіус-вектор центру однорідного елементарного атмосферного аерозолю, в фока_ льній площині об'єктива одиничного датчику; r плинне значення радіуса-вектора. У полярній системі ця функція має вигляд: r2 b c (r ) = b c exp( − ) (6) 2 rc де rс - радіус основи моделі елементарного об'єму атмосферного аерозолю, bc - амплітуда енергетичної яскравості елементарного об'єму аерозолю. 4. Просторовий спектр елементарного об'єму атмосфери з заданою щільністю будемо визначати по розподіленню його енергетичної яскравості за допомогою двомірного перетворення Фурье: _ __ В( ϖ ) = ∫ b( r ) exp(− j ωr )dS _ (7) r Sr де ϖ - вектор просторової щільності, декартові компоненти якого ωх і ωу визначають кількість хвиль (періодів) на одиницю довжини, помножену на 2π; __ __ ωr - формальний скалярний добуток ϖ і r . 5. Для функцій, які залежні тільки від радіусу, що справедливо для обраної моделі об'єкта сканування, використаємо відоме перетворення Ханкеля, що є одномірним еквівалентом двомірного перетворення Фурье: ∞ B(ωr ) = 2π ∫ b(r )J0 (ωr r )rdr 0 J0 = − j cos( γ − ϕ), (8) ωr = ω2 + ω2 , x y γ = arctg ωy 8 _ ності, γ - аргумент вектору ω , ϕ - кут сканування елементарного об'єму датчиком від центру к його краям. За допомогою моделі (6), вилучимо інтегральну функцію з виразу (8): ⎛ ω 2r 2 ⎞ 2 B(ωr ) = b c πrc exp⎜ − r r ⎟ ⎜ 4 ⎟ ⎟ ⎜ ⎠ ⎝ (9) Таким чином вираз (9) є основою для проектування первинного оптичного датчика системи моніторингу зображення аеродромних світлосигнальних вогнів в атмосферному аерозолі, так як визначає геометричні розміри об'єктива і необхідну характеристику оптичної системи для сканування атмосферного аерозольного простору на задану глибину. 6. Як відомо, люба реальна оптична система повинна мати границю просторового розподілу. Тому зображення аеродромних вогнів, що відтворюється системою, повинні бути істотно обмежені за високими частотами спектру. Тому функцію, що описує енергетичну освітленість N датчиків системи Е(х,у), представимо дискретними відліками в рівновідносних просторових інтервалах. Так, якщо Е(ωх, ωу)=0, (ωх, ωу)∉ А, де А - область просторових частот, в нашому випадку ця область повинна мати вигляд деякого прямокутника з сторонами які визначаються відношеннями: 2π , 2ω хm = c (10) 2π , 2ω ym = d де с, d - геометричні розмири сторін прямокутника який визначений для розміщення датчиків на поверхні землі. Для системи моніторингу аеродромних вогнів параметри с і d визначають геометричну зону розташування датчиків на земній поверхні. Енергетична освітленість датчиків, які розташовані в обраному прямокутнику, з інтервалом, що відповідає кордонам ненульових значень спектру, в загальному вигляді визначимо виразом: , ωx E( x, y ) = ∞ ∑ ∞ ∑ n = −∞ m = −∞ ei (nc, md ) sin[( x − nc )ω xm ]sin[( y − md )ω xm ] (11) ( x − nc )ω xm ( y − md )ω xm 7. Відповідно до (11) і теореми КотельниковаШеннона, дискретне завдання функції енергетичної освітленості зображення аеродромних вогнів на деякій прямокутної структурі типу "грати" визначає розмір кроку цієї структури (тобто, місце встановлення датчиків на земній поверхні) і величину фоточутливості пластини первинного датчи ка. Таке рішення дозволяє провести заміну просторових похідних граничними різницями цих же порядків. Граничні різниці, в явному вигляді відображають факт усереднювання просторових похідних до обраної точки, що прилягає до ділянки зображення яка зондується. Одномірна кінцева різниця n-го порядку визначається виразом: 9 44846 10 ~ ~ ⎡ ⎤ 2 ∆nU( x ) = U( x + n ∆x ) − C1U[x + (n − 1)∆x ] + CnU⎢ x + (n − 2)∆x ⎥ − ... (12) n ⎢ ⎥ ⎣ ⎦ де Ck = n k. n! - кількість сполучень з n по k! (n − k! ) 8. Досвід розробки подібних [5] систем показує, що при їх побудові необхідно віддавати перевагу різницям другого порядку, що реалізуються алгоритмом неперерваного у часі оператора ∇ 2 (Лапласианом): ∂ ∂ 1 ∂ ⎛ ∂ ⎞ 1 ∂2 (13) ⎜ρ ⎟ + + = ⎜ ⎟ ∂x2 ∂y2 ρ ∂ρ ⎝ ∂ρ ⎠ ρ2 ∂Θ2 де - ρ - різність енергетичної яскравості від двох поряд розташованих датчиків. ∇2 = U1,4 = U0 ± ∂U ∂x R0 + 1 ∂2 2 R ; 2 ∂x 2 0 ⎛ 1 ⎛ ∂U ∂U ⎞ ⎟R 0 + 1 ⎜ 1 ⎜ + 3 4⎜2 2 ⎜ ∂x ∂y ⎟ ⎠ ⎝ ⎝ ⎛ 1 ⎛ ∂U ∂U ⎞ ⎟R 0 + 1 ⎜ 1 U5,6 = U0 ± ⎜ − 3 ⎜2 ⎟ ⎜ 2 ⎝ ∂x 4 ∂y ⎠ ⎝ U2,3 = U0 ± ∂ 2U 3 ∂ 2U ∂ 2U ⎞ 2 ⎟R ; + ± 3 2 2 ∂y 2 ∂x∂y ⎟ 0 ∂x ⎠ ∂U U1 − U2 U5 − U2 + U3 − U6 ; = − 3 6 ∂x ∂U U2 − U5 + U3 − U6 ; = ∂y 2 3 ∂ 2U = U1 − 2U0 + U4 ; ∂x 2 (14) ∂ 2U 3 ∂ 2U ∂ 2U ⎞ 2 ⎟R ; + ± 3 ∂x∂y ⎟ 0 ∂x 2 2 ∂y 2 ⎠ де Uij - різність напруг між двома поряд розташованими датчиками. З (14), при відповідності до додаткової умови симетрії, складемо частинні похідні: , (15) ∂ 2U 2(U2 + U3 + U5 + U6 ) − U1 − U4 = − 2U0 ; 3 ∂y 2 ∂ 2U U2 − U3 + U5 − U6 = . ∂x∂y 3 За допомогою (15), з використанням (13), запишемо вираз для Лапласиана ∇ 2 з точністю до постійного множника для датчиків, що відповідно розташовані з рис.4.1: ∇2 = 9. Далі, розглянемо принцип роботи цього алгоритму при контролі елементарного об'єму візуальної інформації про зображення одного аеродромного вогню. Розмістимо сім оптичних датчиків у зоні знаходження цього вогню по схемі, що вказана на Фіг.1. Датчик №0 розташуємо поряд з вогнем, датчики №1 і №4 попереду та позаду від вогню на продовженні осьової лінії х. Останні датчики розташуємо в кордонах кола радіусом R0. Застосуємо розклад у ряд Тейлора, відносно датчика №0 і обмежуючись членами другого порядку, запишемо вираз для шести дискретних рахунків, і використаємо нумерацію датчиків відповідно до Фіг.1 та складемо їх по два для стислості запису: ⎛ 1 6 ⎞ ∂ 2U ∂ 2U 2 6 U − 4U0 = −4⎜ U0 − ∑ Ui ⎟. (16) + = ⎟ ⎜ 2 ∂y2 3 ∑ i 6 ∂x i =1 i =1 ⎠ ⎝ 10. Кількість датчиків і конфігурація їх розташування підкоряється заданій точності системи моніторингу, яка у свою чергу, визначається згідно з просторово - частотною характеристикою чутливості ока пілота. Тому, періодичну структуру отриманого зображення фрагмента аеродромних вогній запишемо у наступному вигляді: B = B0 (1 + m cos 2πωϕ ), Bmax − Bmin , (17) Bmax + Bmin 2m k= , 1+ m де m - коефіцієнт модуляції енергетичної яскравості отриманого фрагменту зображення аеродромних вогнів; В - енергетична яскравість елементарного об'єму зображення вогнів у атмосферному аерозолі; k - контраст зображення аеродромних вогній. Таким чином, завершений алгоритм - обчислює і апроксимує отримане значення просторового спектру зображення, яке датчик сканує і порівнює з граничними значеннями контрастної і частотної чутливості ока пілота. Після цієї процедури система дає рекомендації щодо імовірності просторової орієнтації пілота в реальному часі і можливості здійснення ним посадки у складних метеорологічних умовах. Джерела інформації 1. Система мониторинга за аэродромными огнями. Пат. 6483314 США МПК7 G01R31/00, Н04М11/04, опубл.19.11.2002; приор.27.01.2000, №200-01889 (Япон). 2. Попов П.В., Ванецян С.Г., Система электропитания аэродромных огней. AC CPCP, №1149855, МКИ G08B21/00, заявлено 16.06.82; зарегистрировано 08.12.84 г., ДСП. 3. Установка для измерения интенсивности освещения светосигнального оборудования. Yamamura Т., Kodaira Т. "Fuji Elec. J.", 1986, 59, №12. 771-773. Реферативн. Журнал 06, 1988, №3, 3Д59, С.7. m= 11 44846 12 4. Ковалев В.А. Видимость в атмосфере и ее 5. Левшин В.Л. Обработка информации в опопределение. Л., Гидрометеоиздат, 1988. - С.215. тических системах пеленгации. - М.: Машиностроение, 1978, - С.167. Комп’ютерна верстка В. Мацело Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for monitoring of image of airdrome lights in atmospheric aerosol
Автори англійськоюKazak Vasyl Mykolaiovych, Popov Petro Vasyliovych, Tachynina Olena Mykolaivna
Назва патенту російськоюСпособ мониторинга изображения аэродромных огней в атмосферном аэрозоле
Автори російськоюКазак Василий Николаевич, Попов Петр Васильевич, Тачинина Елена Николаевна
МПК / Мітки
МПК: G08G 5/00
Мітки: зображення, аерозолі, аеродромних, атмосферному, моніторингу, спосіб, вогнів
Код посилання
<a href="https://ua.patents.su/6-44846-sposib-monitoringu-zobrazhennya-aerodromnikh-vogniv-v-atmosfernomu-aerozoli.html" target="_blank" rel="follow" title="База патентів України">Спосіб моніторингу зображення аеродромних вогнів в атмосферному аерозолі</a>
Спосіб виділення контуру зображення
Номер патенту: 29418
Опубліковано: 10.01.2008
Автори: Юкиш Сергій Васильович, Білинський Йосип Йосипович
МПК: G06K 9/64
Мітки: контуру, спосіб, зображення, виділення
Формула / Реферат:
Спосіб виділення контуру, який включає операцію згладжування за допомогою згортання з гауссіаном і обчислення градієнта зображення в вертикальному та горизонтальному напрямках за допомогою одного із операторів першої похідної, який відрізняється тим, що в ньому повторно виконують операцію згладжування з наступним виділенням точок перетину примежових кривих вхідного та зображення, отриманого в результаті повторного згладжування, для усунення...
Спосіб визначення міді в зварювальному аерозолі
Номер патенту: 15078
Опубліковано: 15.06.2006
Автори: Рудницька Тетяна Сергіївна, Рокун Антоніна Миколаївна
МПК: G01N 21/31
Мітки: спосіб, визначення, аерозолі, зварювальному, міді
Формула / Реферат:
Спосіб визначення міді в зварювальному аерозолі, який включає відбір проб на аерозольні фільтри АФА-ХА, атомно-абсорбційне визначення міді, який відрізняється тим, що у полум'я атомізатора розпилюють розчин проби в органічному розчиннику, при цьому якрозчинник використовують суміш ацетону, 25 %-ного гідроксиду амонію, 10%-ного трилону Б, дистильованої води у об'ємному співвідношенні 7:2,5:0,25:0,25.
Пристрій для визначення просторового зміщення зображення об’єкту по відношенню до еталону зображення
Номер патенту: 30433
Опубліковано: 15.11.2000
Автори: Тернова Тетяна Іванівна, Храпливий Анатолій Петрович, Тимофеєв Констянтин Васильович, Рожков Сергій Олександрович, Бражник Олександр Михайлович
Мітки: еталону, відношенню, зображення, пристрій, зміщення, визначення, об'єкту, просторового
Формула / Реферат:
1. Пристрій для визначення просторового зміщення зображення об'єкту по відношенню до еталону зображення, що містить послідовно розташовані прилад для знімання інформації, прилад для зберігання еталону, перетворювач Фур'є і прилад для обчислення кореляційної функції, відрізняючий тим, що він додатково містить два смугових фільтра, входи яких електрично зв'язані з перетворювачем сигналу зображення і сигналу еталону відповідно, а виходи...
Спосіб переведення зображення на текстильний матеріал та полотно носія зображення для перенесення кольорового зображення на текстильний матеріал
Номер патенту: 26264
Опубліковано: 19.07.1999
Автори: Торен Клаєс-Йоран, Очерблом Інга Стіна, Педерсен Йорген, Расмуссен Кнуд
МПК: D06P 5/00
Мітки: зображення, спосіб, полотно, переведення, носія, кольорового, перенесення, текстильний, матеріал
Формула / Реферат:
1. Способ перевода изображения на текстильный материал из натурального волокна или смеси его с синтетическим волокном путем обработки смачивающим раствором с последующим контактированием с носителем, состоящим из бумаги с нанесенной на нее печатной краской, под давлением, отличающийся тем, что в качестве носители используют бумагу с воздухопроницаемостью 0,5 - 3000нм/Па × с и водопоглощением, соответствующим числу Кобба ниже 50, с...
Спосіб відтворення об’ємного зображення
Номер патенту: 28303
Опубліковано: 10.12.2007
Автори: Івасик Олена Іванівна, Лебедько Олексій Олександрович, Руденко Олег Петрович
Мітки: спосіб, зображення, відтворення, об`ємного
Формула / Реферат:
Спосіб відтворення об'ємного зображення, який полягає в тому, що на підготовлену поверхню наносять елементи зображення, який відрізняється тим, що попередньо виконані переважно за трафаретами з листового матеріалу елементи зображення збирають у комплекти, за допомогою яких відтворюють зображення шляхом накладання і закріплення елементів один на одний відповідно до зменшення розмірів останніх.
Попередній патент: Щілинна антена
Наступний патент: Малоелементна антенна решітка обертової поляризації з керованою діаграмою спрямованості
Випадковий патент: Полімерна композиція