Спосіб визначення ідентифікатора положення вектора потокозчеплення ротора, значень активної та намагнічуючих складових струму статора асинхронного двигуна
Номер патенту: 48510
Опубліковано: 25.03.2010
Автори: Топчієнко Юрій Анатолійович, Воробейчик Олег Станіславович, Урдін Ігор Володимирович, Козакевич Ігор Аркадійович

Формула / Реферат
Спосіб визначення ідентифікатора положення вектора потокозчеплення ротора, значень активної та намагнічуючих складових струму статора асинхронного двигуна, що включає
реєстрацію реально діючих сигналів у режимах робочого функціонування асинхронного двигуна й наступну обробку зареєстрованих сигналів, який відрізняється тим, що як реально діючі в асинхронному двигуні сигнали використовують поточні значення фазних струмів, при цьому ідентифікатор положення вектора потокозчеплення ротора знаходять через значення пропорційних складовим вектора потокозчеплення ротора змінних ![]() і
і ![]() за формулами:
за формулами:
![]()
![]() ,
,
де ![]() - задане значення намагнічуючої складової струму статора;
- задане значення намагнічуючої складової струму статора;
![]() - задане значення активної складової струму статора;
- задане значення активної складової струму статора;
![]() - проекція узагальненого вектора струму на вісь
- проекція узагальненого вектора струму на вісь ![]() ;
;
![]() - проекція узагальненого вектора струму на вісь
- проекція узагальненого вектора струму на вісь ![]() ,
,
потім обчислюють кут ![]() між вектором потокозчеплення й віссю
між вектором потокозчеплення й віссю ![]() нерухливої системи координат по формулі:
нерухливої системи координат по формулі:
![]() ,
,
а намагнічуючу складову статорного струму й активну складову статорного струму обчислюють за формулами:
![]()
![]()
Текст
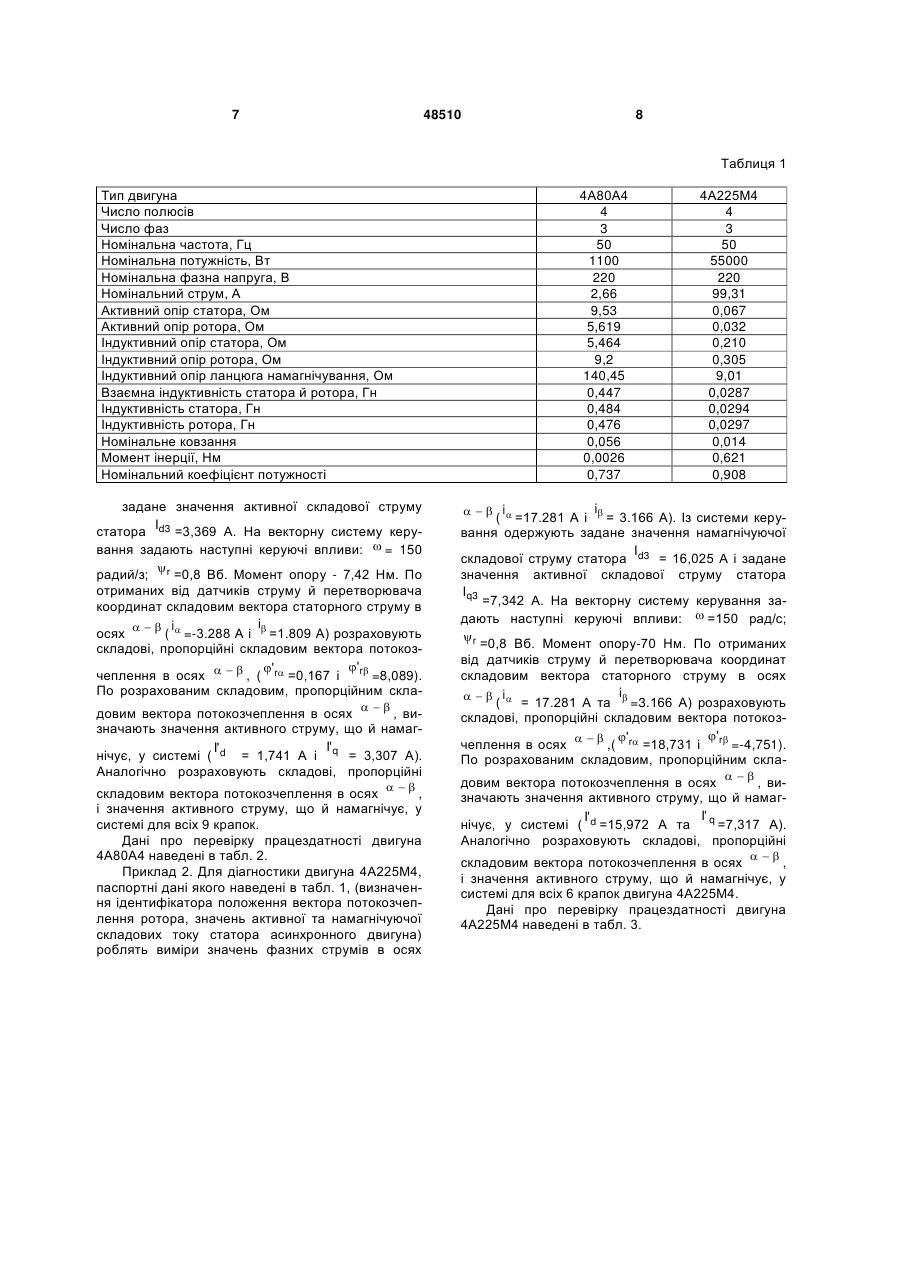
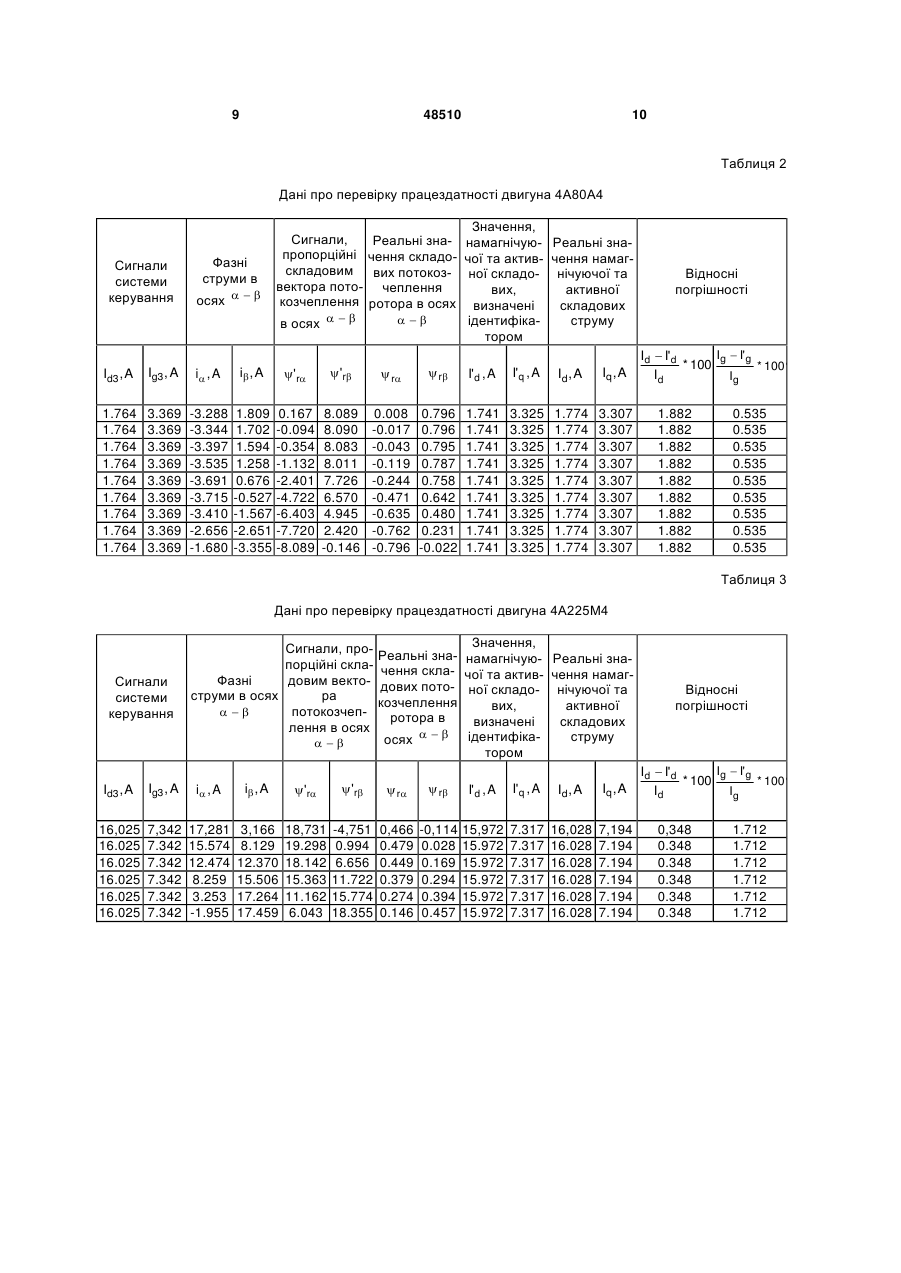
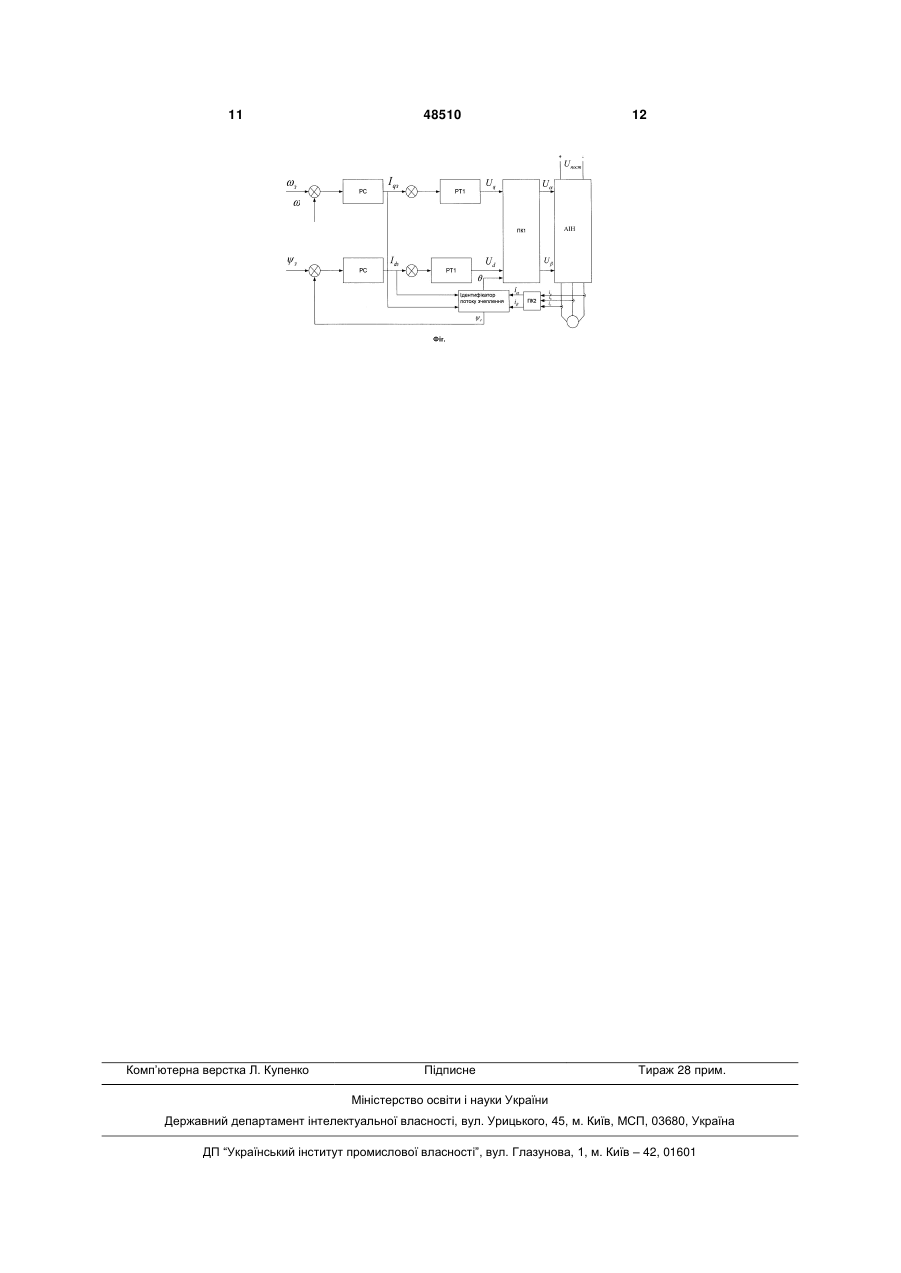
Спосіб визначення ідентифікатора положення вектора потокозчеплення ротора, значень активної та намагнічуючих складових струму статора асинхронного двигуна, що включає реєстрацію реально діючих сигналів у режимах робочого функціонування асинхронного двигуна й наступну обробку зареєстрованих сигналів, який відрізняється тим, що як реально діючі в асинхронному двигуні сигнали використовують поточні значення фазних струмів, при цьому ідентифікатор положення вектора потокозчеплення ротора знаходять через значення пропорційних складовим 3 48510 потужності, і наведені активний й індуктивний опір ротора обчислюють за формулами: pP (U1 I1x1 )2 rm (1 ) н r'2 , 2 2 U1 2U1I1( x1 x m ) I2 ( x1 x m )2 rm x' 2 2 (U1 I1x1 ) I(rm 2 U1 2U1I1( x1 де rm 2 x m ) U1x m x m ) I2 ( x 1 I1x1x m xm ) 2 , 2 rm x1 - індуктивний опір ротора, xm і - активний і індуктивний опір контуру, що намагнічує, двигуна, U1 - номінальна напруга. Недоліком відомого способу є відсутність можливості обчислення значень складових вектора потокозчеплення, значень активної та намагнічуючих складових струму статора асинхронного двигуна через ті величини, вимір яких не представляє складності, наприклад фазні струми. Відомий також спосіб визначення активних опорів, власних і взаємних індуктивностей статорів і роторів асинхронних двигунів (див. наприклад, деклараційний патент України на корисну модель №42582 «Спосіб визначення активних опорів, власних і взаємних індуктивностей статора й ротора асинхронних двигунів»). Даний спосіб включає реєстрацію реально діючих в асинхронному двигуні сигналів у режимах його робочого функціонування з наступною статистичною обробкою сигналів; при цьому в якості реально діючих в асинхронному двигуні сигналів використовують миттєві «значення фазних струмів для 4-х послідовних інтервалів виміру, миттєві значення фазних або лінійних напруг для 4-х послідовних інтервалів виміру й частоту обертання валу машини (один вимір при стабільній швидкості або чотири при нестабільній), а в якості параметрів асинхронних двигунів-активні опори статора й ротора, власні індуктивності статора й ротора і їх взаємну індуктивність; причому обчислення параметрів асинхронного двигуна роблять по відповідних формулах. Даний спосіб визначення активних опорів, власних і взаємних індуктивностей статорів і роторів асинхронних двигунів є найбільш близьким по технічній сутності та ефекту, що досягається, до способу визначення ідентифікатора положення вектора потокозчеплення ротора, значень активної та намагнічуючої складових струму статора асинхронного двигуна, що заявляється. Недоліком даного способу є відсутність можливості обчислення значень складових вектора потокозчеплення, значень активної та намагнічуючої складових струму статора асинхронного двигуна через ті величини, вимір яких не представляє складності, наприклад, реально діючих сигналів, у режимах робочого функціонування асинхронного двигуна, таких як фазні струми. Загальними ознаками найближчого аналога (прототипу) та способу визначення ідентифікатора положення вектора потокозчеплення ротора, значень активної та намагнічуючої складових струму статора асинхронного двигуна, що заявляється, є: 4 - реєстрація реально діючих сигналів у режимах робочого функціонування асинхронного двигуна; - наступна обробка зареєстрованих сигналів. В основу корисної моделі поставлено задачу удосконалення способу визначення ідентифікатора положення вектора потокозчеплення ротора, значень активної та намагнічуючої складових струму статора асинхронного двигуна шляхом одержання оцінки просторового положення вектора потокозчеплення, значень активної, та намагнічуючої складових струму статора асинхронного двигуна, що дозволить збільшити точність одержання оцінки просторового положення вектора потокозчеплення, значень активної та намагнічуючої складових струму статора асинхронного двигуна, і тим самим підвищити якість регулювання асинхронного двигуна. Очікуваним технічним результатом корисної моделі, що заявляється (способу визначення ідентифікатора положення вектора потокозчеплення ротора, значень активної та намагнічуючої складових струму статора асинхронного двигуна) є підвищення якості регулювання асинхронного двигуна за рахунок підвищення точності одержання оцінки просторового положення вектора потокозчеплення, значень активної та намагнічуючої складових струму статора асинхронного двигуна шляхом виміру реально діючих сигналів у режимах робочого функціонування асинхронного двигуна і їх наступної математичної обробки. Зазначений технічний результат досягається тим, що в способі визначення ідентифікатора положення вектора потокозчеплення ротора, значень активної та намагнічуючої складових струму статора асинхронного двигуна, що включає реєстрацію реально діючих сигналів у режимах робочого функціонування асинхронного двигуна й наступну обробку зареєстрованих сигналів, відповідно до технічного рішення, що заявляється, у якості реально діючих в асинхронному двигуні сигналів використовують поточні значення фазних струмів, при цьому ідентифікатор положення вектора потокозчеплення ротора знаходять через значення пропорційних складовим вектора потокозчеплення ' ' ротора змінних і формулах: ' i I q 3 i / I d 3 ' i Iq3 i / Id3 , I d3 де - задане значення, намагнічуючої складових струмів статора; Iq3 - задане значення активної складової струму статора; i - проекція узагальненого вектора струму на вісь ; i - проекція узагальненого вектора струму на вісь , потім обчислюють кут в між вектором потокозчеплення й віссю нерухливої системи координат по формулі: 5 ' arctran ' , а намагнічуючу складову статорного струму й активну складову статорного струму обчислюють за формулами: 2 2 I d i ' /(' 2 ' )0,5 i ' /(' 2 ' )0,5 ; 2 2 I q i ' /( ' ' 2 ) 0,5 i ' /( ' '2 ) 0,5 ; Сутність технічного рішення, що заявляється, полягає в тому, що при використанні в якості реально діючих в асинхронному двигуні сигналів поточних значень фазних струмів, при знаходженні ідентифікатора положення вектора потокозчеплення ротора через значення пропорційних складовим вектора потокозчеплення ротора змінних ' ' i Ig3 i / Id3 ' і по формулах та ' i Ig3 i / Iq3 при подальшому обчисленні кута потокозчеплення і віссю нерухомої сис arctan( ' / ' ) теми координат по формулі: , при обчисленні складових, значень активної та намагнічуючої складових струму статора по форму лах 2 2 I d i ' /(' 2 ' )0,5 i ' /(' 2 ' )0,5 ; 2 2 Iq i ' /(' 2 ' )0,5 i' /(' 2 ' )0,5 ; відбувається підвищення точності отримання оцінки просторового положення вектора потокозчеплення, значень активної та намагнічуючої складових струму статора асинхронного двигуна, що веде до підвищення якості регулювання асинхронного двигуна за рахунок підвищення точності отримання оцінки просторового положення вектора потокозчеплення, значень активної і намагнічує складових струму статора асинхронного двигуна шляхом вимірювання реально діючих сигналів в режимах робочого функціонування асинхронного двигуна. При цьому для визначення ідентифікатора положення вектора потокозчеплення ротора, значень активної та намагнічуючої складових струму статора асинхронного двигуна не вимагається проведення вимірювань внутрішніх параметрів асинхронного двигуна, які змінюються в процесі його роботи. Отже, спосіб, що заявляється, визначення ідентифікатора положення вектора потокозчеплення ротора, значень активної та намагнічуючої складових струму статора асинхронного двигуна є абсолютно стійким до змін параметрів об'єкту управління - асинхронного двигуна. Таким чином, сукупність істотних ознак технічного рішення, що заявляється (способу визначення ідентифікатора положення вектора потокозчеплення ротора, значень активної, та намагнічуючої складових струмів статора асинхронного двигуна), веде до досягнення технічного результату, зазначеного у винаході, що заявляється. Сутність технічного рішення, що заявляється, ілюструється також типовою структурою векторного керування асинхронним двигуном, що харчуються від перетворювача частоти з автономним інвертором напруги, наведеної на фігурі. Позначення на фігурі: 48510 6 3 - задана частота обертання вала двигуна; - поточна частота обертання вала двигуна; 3 - задане значення модуля вектора потокозчеплення; Id3 - задане значення намагнічуючої складової струму статора; Іq3 - задане значення активної складової струму статора; Id - поточне значення намагнічуючої складової струму статора; Iq - поточне значення активної складової струму статора; Ud - проекція узагальненого вектора напруги на вісь d; Uq - проекція узагальненого вектора напруги на вісь q; U - проекція узагальненого вектора напруги на вісь ; U - проекція узагальненого вектора напруги на вісь ; ia - значення фазного струму фази A; ib - значення фазного струму фази B; ic - значення фазного струму фази 3; i - проекція узагальненого вектора струму на вісь ; i - проекція узагальненого вектора струму на вісь - кут між узагальненим вектором потокозчеплення й віссю ; PC - регулятор швидкості; РП - регулятор потокозчеплення; РТ1 - регулятор активної складової струму; РТ2 - регулятор складової намагнічуючої струму; ПК1- перетворювач координат з обертової системи координат у нерухливу щодо статора; ПК2 - перетворювач координат із трифазної нерухливої щодо статора системи координат у двофазну нерухливу щодо статора. Застосування способу визначення ідентифікатора положення вектора потокозчеплення ротора, значень активної та намагнічуючої складових струму статора асинхронного двигуна, що заявляється, ілюструється наступним прикладом конкретного здійснення. Приклад 1. Для діагностики двигуна 4А80А4, паспортні дані якого наведені в табл. 1, (визначення ідентифікатора положення вектора потокозчеплення ротора, значень активної та намагнічуючої складових току статора асинхронного двигуна) роблять виміри значень фазних струмів в осях ( i =-3.288 А та i = 1.809 А). Із системи керування одержують задане значення, що намагнічує I складової струму статора d3 =1,764 А і Паспортні дані асинхронних двигунів 7 48510 8 Таблиця 1 Тип двигуна Число полюсів Число фаз Номінальна частота, Гц Номінальна потужність, Вт Номінальна фазна напруга, В Номінальний струм, А Активний опір статора, Ом Активний опір ротора, Ом Індуктивний опір статора, Ом Індуктивний опір ротора, Ом Індуктивний опір ланцюга намагнічування, Ом Взаємна індуктивність статора й ротора, Гн Індуктивність статора, Гн Індуктивність ротора, Гн Номінальне ковзання Момент інерції, Нм Номінальний коефіцієнт потужності задане значення активної складової струму I статора d3 =3,369 А. На векторну систему керування задають наступні керуючі впливи: = 150 радий/з; r =0,8 Вб. Момент опору - 7,42 Нм. По отриманих від датчиків струму й перетворювача координат складовим вектора статорного струму в i i осях ( =-3.288 А і =1.809 А) розраховують складові, пропорційні складовим вектора потокоз' ' чеплення в осях , ( r =0,167 і r =8,089). По розрахованим складовим, пропорційним складовим вектора потокозчеплення в осях , визначають значення активного струму, що й намагI' I' нічує, у системі ( d = 1,741 А і q = 3,307 А). Аналогічно розраховують складові, пропорційні складовим вектора потокозчеплення в осях , і значення активного струму, що й намагнічує, у системі для всіх 9 крапок. Дані про перевірку працездатності двигуна 4А80А4 наведені в табл. 2. Приклад 2. Для діагностики двигуна 4А225М4, паспортні дані якого наведені в табл. 1, (визначення ідентифікатора положення вектора потокозчеплення ротора, значень активної та намагнічуючої складових току статора асинхронного двигуна) роблять виміри значень фазних струмів в осях 4А80А4 4 3 50 1100 220 2,66 9,53 5,619 5,464 9,2 140,45 0,447 0,484 0,476 0,056 0,0026 0,737 4А225М4 4 3 50 55000 220 99,31 0,067 0,032 0,210 0,305 9,01 0,0287 0,0294 0,0297 0,014 0,621 0,908 ( i =17.281 А і i = 3.166 А). Із системи керу вання одержують задане значення намагнічуючої I складової струму статора d3 = 16,025 А і задане значення активної складової струму статора Iq3 =7,342 А. На векторну систему керування задають наступні керуючі впливи: =150 рад/с; r =0,8 Вб. Момент опору-70 Нм. По отриманих від датчиків струму й перетворювача координат складовим вектора статорного струму в осях ( i = 17.281 А та i =3.166 А) розраховують складові, пропорційні складовим вектора потокоз' ' чеплення в осях ,( r =18,731 і r =-4,751). По розрахованим складовим, пропорційним складовим вектора потокозчеплення в осях , визначають значення активного струму, що й намагI' I' нічує, у системі ( d =15,972 А та q =7,317 А). Аналогічно розраховують складові, пропорційні складовим вектора потокозчеплення в осях , і значення активного струму, що й намагнічує, у системі для всіх 6 крапок двигуна 4А225М4. Дані про перевірку працездатності двигуна 4А225М4 наведені в табл. 3. 9 48510 10 Таблиця 2 Дані про перевірку працездатності двигуна 4А80А4 Сигнали системи керування Фазні струми в осях Id3 , A Ig3 , A i , A 1.764 1.764 1.764 1.764 1.764 1.764 1.764 1.764 1.764 3.369 3.369 3.369 3.369 3.369 3.369 3.369 3.369 3.369 -3.288 -3.344 -3.397 -3.535 -3.691 -3.715 -3.410 -2.656 -1.680 Значення, Реальні зна- намагнічую- Реальні значення складо- чої та актив- чення намагвих потокоз- ної складо- нічуючої та чеплення вих, активної ротора в осях визначені складових ідентифікаструму в осях тором Сигнали, пропорційні складовим вектора потокозчеплення ' r r r I' d , A I' q , A Id, A Iq , A 8.089 8.090 8.083 8.011 7.726 6.570 4.945 2.420 -0.146 0.008 -0.017 -0.043 -0.119 -0.244 -0.471 -0.635 -0.762 -0.796 0.796 0.796 0.795 0.787 0.758 0.642 0.480 0.231 -0.022 1.741 1.741 1.741 1.741 1.741 1.741 1.741 1.741 1.741 3.325 3.325 3.325 3.325 3.325 3.325 3.325 3.325 3.325 1.774 1.774 1.774 1.774 1.774 1.774 1.774 1.774 1.774 3.307 3.307 3.307 3.307 3.307 3.307 3.307 3.307 3.307 'r i , A 1.809 0.167 1.702 -0.094 1.594 -0.354 1.258 -1.132 0.676 -2.401 -0.527 -4.722 -1.567 -6.403 -2.651 -7.720 -3.355 -8.089 Відносні погрішності Ig I' g Id I' d * 100 % * 100 % Id Ig 1.882 1.882 1.882 1.882 1.882 1.882 1.882 1.882 1.882 0.535 0.535 0.535 0.535 0.535 0.535 0.535 0.535 0.535 Таблиця 3 Дані про перевірку працездатності двигуна 4А225М4 Сигнали системи керування Сигнали, пропорційні склаФазні довим вектоструми в осях ра потокозчеп лення в осях Значення, Реальні зна- намагнічую- Реальні значення скла- чої та актив- чення намагдових пото- ної складо- нічуючої та козчеплення вих, активної ротора в визначені складових струму осях ідентифікатором Id3 , A Ig3 , A i , A i , A 'r ' r r r I' d , A I' q , A Id, A Iq , A 16,025 16.025 16.025 16.025 16.025 16.025 7,342 7.342 7.342 7.342 7.342 7.342 17,281 15.574 12.474 8.259 3.253 -1.955 3,166 8.129 12.370 15.506 17.264 17.459 18,731 19.298 18.142 15.363 11.162 6.043 -4,751 0.994 6.656 11.722 15.774 18.355 0,466 0.479 0.449 0.379 0.274 0.146 -0,114 0.028 0.169 0.294 0.394 0.457 15,972 15.972 15.972 15.972 15.972 15.972 7.317 7.317 7.317 7.317 7.317 7.317 16,028 16.028 16.028 16.028 16.028 16.028 7,194 7.194 7.194 7.194 7.194 7.194 Відносні погрішності Ig I' g Id I' d * 100 % * 100 % Id Ig 0,348 0.348 0.348 0.348 0.348 0.348 1.712 1.712 1.712 1.712 1.712 1.712 11 Комп’ютерна верстка Л. Купенко 48510 Підписне 12 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of identifier of rotor flux linkage vector position, values of active and magnetizing components of stator current of an asynchronous motor
Автори англійськоюVorobeichyk Oleh Stanislavovych, Kozakevych Ihor Arkadiovych, Topchienko Yurii Anatoliiovych, Urdin Ihor Volodymyurovych
Назва патенту російськоюСпособ определения идентификатора положения вектора потокосцепления ротора, значений активной и намагничивающих составляющих тока статора асинхронного двигателя
Автори російськоюВоробейчик Олег Станиславович, Козакевич Игорь Аркадьевич, Топчиенко Юрий Анатолиевич, Урдин Игорь Владимирович
МПК / Мітки
МПК: H02K 15/00
Мітки: намагнічуючих, положення, визначення, двигуна, активної, спосіб, ідентифікатора, статора, струму, значень, ротора, вектора, потокозчеплення, асинхронного, складових
Код посилання
<a href="https://ua.patents.su/6-48510-sposib-viznachennya-identifikatora-polozhennya-vektora-potokozcheplennya-rotora-znachen-aktivno-ta-namagnichuyuchikh-skladovikh-strumu-statora-asinkhronnogo-dviguna.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення ідентифікатора положення вектора потокозчеплення ротора, значень активної та намагнічуючих складових струму статора асинхронного двигуна</a>
Спосіб та пристрій для визначення кутового положення ротора з постійним магнітом багатофазного електричного двигуна
Номер патенту: 72249
Опубліковано: 15.02.2005
Автор: Жан-П'єр Войллат
МПК: H02P 6/14
Мітки: кутового, положення, двигуна, електричного, визначення, багатофазного, магнітом, постійним, ротора, спосіб, пристрій
Формула / Реферат:
1. Спосіб визначення кутового положення ротора з постійним магнітом багатофазного електричного двигуна, що містить принаймні дві статорних обмотки, який включає подачу змінних сигналів на обмотки двигуна і обробку сигналів, отриманих з виходу цих обмоток, який відрізняється тим, що подають перший змінний сигнал, що має першу частоту, на перший кінець, принаймні, першої з вказаних обмоток, знімають сигнал вимірювання за допомогою...
Спосіб визначення потокозчеплень ротора й швидкості частотно-регульованого асинхронного двигуна
Номер патенту: 39949
Опубліковано: 25.03.2009
Автори: Скалько Юрій Сергійович, Волков Олександр Васильович
МПК: H02P 21/00
Мітки: спосіб, частотно-регульованого, визначення, потокозчеплень, швидкості, двигуна, ротора, асинхронного
Формула / Реферат:
1. Спосіб визначення потокозчеплень ротора й швидкості частотно-регульованого асинхронного двигуна, який полягає у тому, що контролюють проекції узагальнених векторів статорної напруги й струму двигуна на осі нерухомої ортогональної координатної системи "", пов'язаної віссю "" з...
Спосіб контролю справності стрижнів короткозамкненої обмотки ротора асинхронного двигуна
Номер патенту: 15261
Опубліковано: 15.06.2006
Автори: Сивокобиленко Віталій Федорович, Полковніченко Дмитро Вікторович
МПК: H02K 17/16, G01R 31/00
Мітки: спосіб, справності, двигуна, контролю, обмотки, асинхронного, короткозамкненої, стрижнів, ротора
Формула / Реферат:
Спосіб контролю справності стрижнів короткозамкненої обмотки ротора асинхронного двигуна, що включає реєстрацію струму статора, на який подано напругу живлення, вимірювання миттєвих значень струму однієї з фаз статора за певний проміжок часу, порівняння між собою суміжних значень струму, який відрізняється тим, що додатково вимірюють миттєві значення струму статора ще в одній із фаз в сталому режимі роботи електродвигуна під навантаженням і...
Спосіб контролю справності стрижнів короткозамкненої обмотки ротора асинхронного двигуна
Номер патенту: 83226
Опубліковано: 25.06.2008
Автори: Полковніченко Дмитро Вікторович, Сивокобиленко Віталій Федорович
МПК: G01R 31/34, G01R 31/06, H02K 17/16, G01R 31/00
Мітки: ротора, обмотки, спосіб, стрижнів, короткозамкненої, асинхронного, справності, контролю, двигуна
Формула / Реферат:
Спосіб контролю справності стрижнів короткозамкненої обмотки ротора асинхронного двигуна, що включає реєстрацію струму статора, на який подана напруга живлення, вимірювання миттєвих значень струму однієї з фаз статора за певний проміжок часу та порівняння між собою суміжних значень струму, який відрізняється тим, що додатково вимірюють миттєві значення струму статора ще в одній із фаз в сталому режимі роботи електродвигуна під навантаженням і...
Спосіб визначення активних опорів, власних і взаємних індуктивностей статора й ротора асинхронних двигунів

Номер патенту: 42582
Опубліковано: 10.07.2009
Автори: Топчієнко Юрій Анатолійович, Козакевич Ігор Аркадійович, Урдін Ігор Володимирович, Воробейчик Олег Станіславович
МПК: H02K 15/00, G01R 31/34
Мітки: власних, статора, визначення, спосіб, асинхронних, індуктивностей, двигунів, опорів, активних, взаємних, ротора
Формула / Реферат:
Спосіб визначення активних опорів, власних і взаємних індуктивностей статора й ротора асинхронних двигунів, що включає реєстрацію реально діючих в асинхронному двигуні сигналів й обчислення по розрахункових формулах параметрів асинхронного двигуна, який відрізняється тим, що реєстрацію реально діючих в асинхронному двигуні сигналів здійснюють у режимах його робочого функціонування з наступною обробкою сигналів; при цьому як реально діючі в...
Попередній патент: Спосіб подання візуальної інформації
Наступний патент: Вогнебіозахисний просочувальний засіб для деревини
Випадковий патент: Спосіб прогнозування виникнення епізодів суправентрикулярної екстрасистолії у хворих на гіпертонічну хворобу іі стадії