Пристрій контролю і керування роботою об’єкта
Формула / Реферат
1. Пристрій контролю і керування роботою об'єкта, що включає мікропроцесорну систему керування, зв'язаний з виконавчими елементами, який відрізняється тим, що мікропроцесорна система зв'язана з комутуючим пристроєм вибору значень параметрів, які фіксуються мікропроцесорною системою і, відповідно, зі знімним запам'ятовуючим пристроєм.
2. Пристрій контролю і керування роботою об'єкта за п. 1, який відрізняється тим, що мікропроцесорна система керування взаємодіє з блоком збереження параметрів і профілів настроювань, що взаємодіє зі знімним пристроєм.
3. Пристрій контролю і керування роботою об'єкта за п. 1, який відрізняється тим, що мікропроцесорна система керування зв'язана з блоком завантаження програмного забезпечення зі знімного запам'ятовуючого пристрою.
4. Пристрій контролю і керування роботою об'єкта за п. 1, який відрізняється тим, що мікропроцесорна система керування взаємодіє з блоком збереження параметрів і профілів настроювань, що взаємодіє зі знімним запам'ятовуючим пристроєм, при цьому мікропроцесорна система керування зв'язана з блоком завантаження програмного забезпечення зі знімного запам'ятовуючого пристрою.
Текст
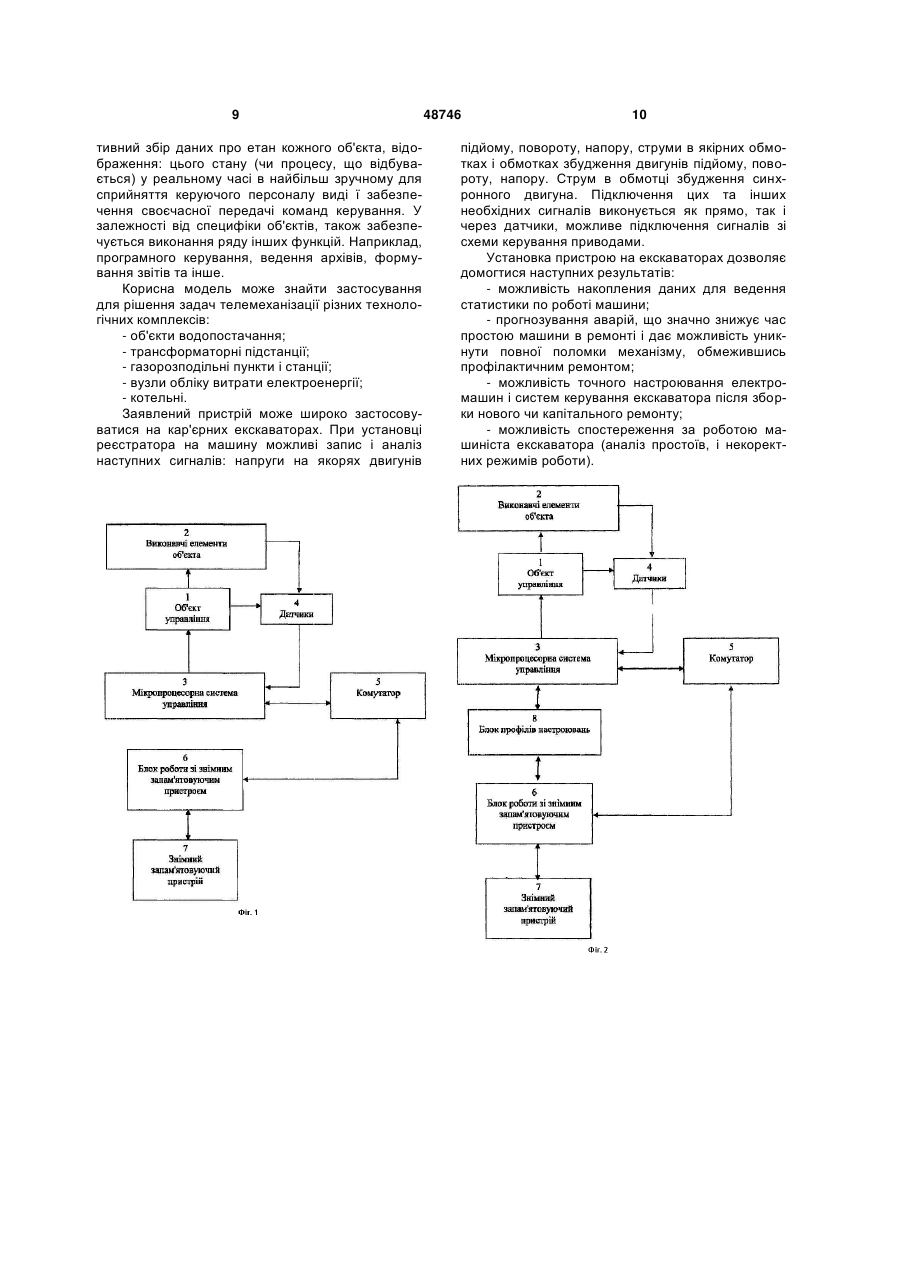
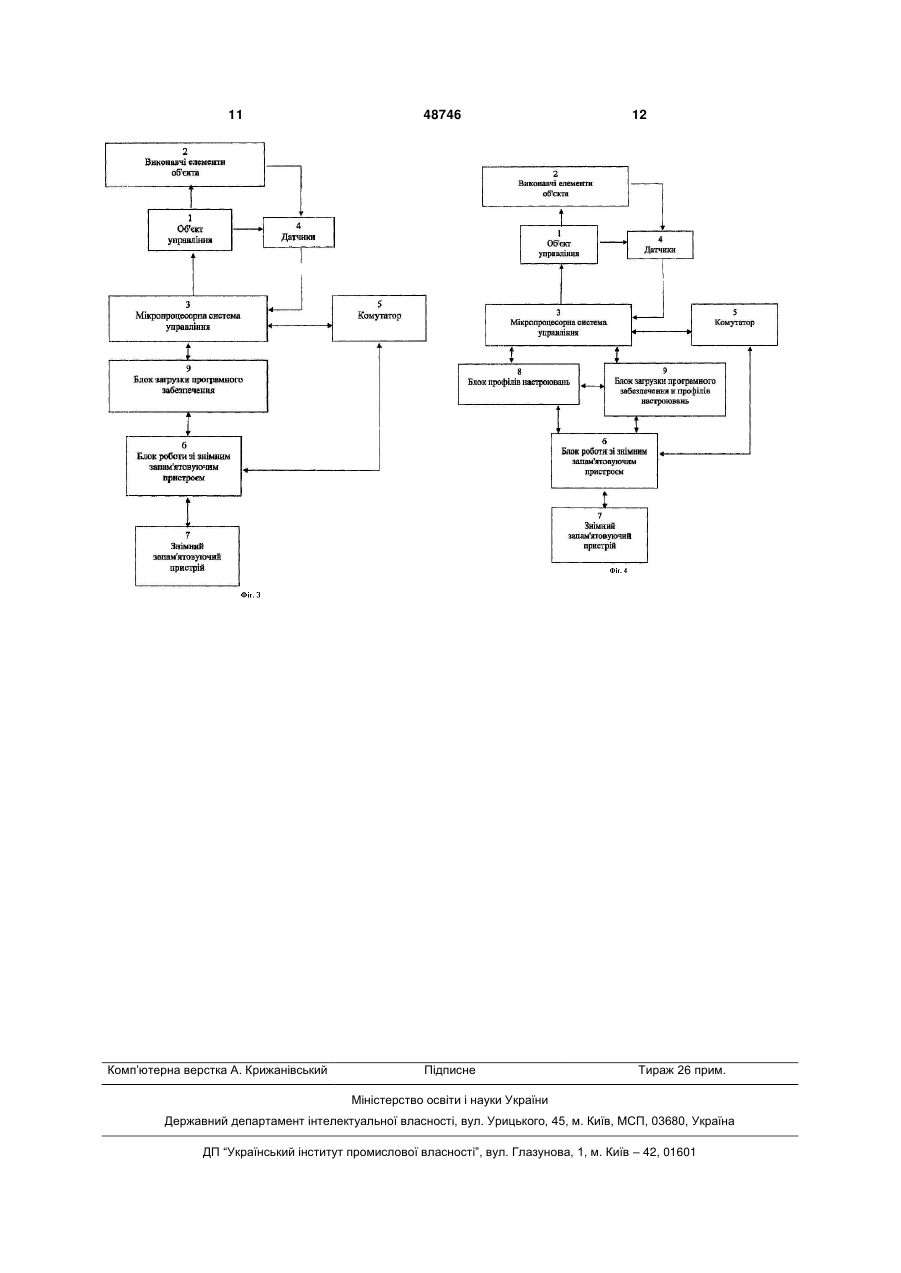
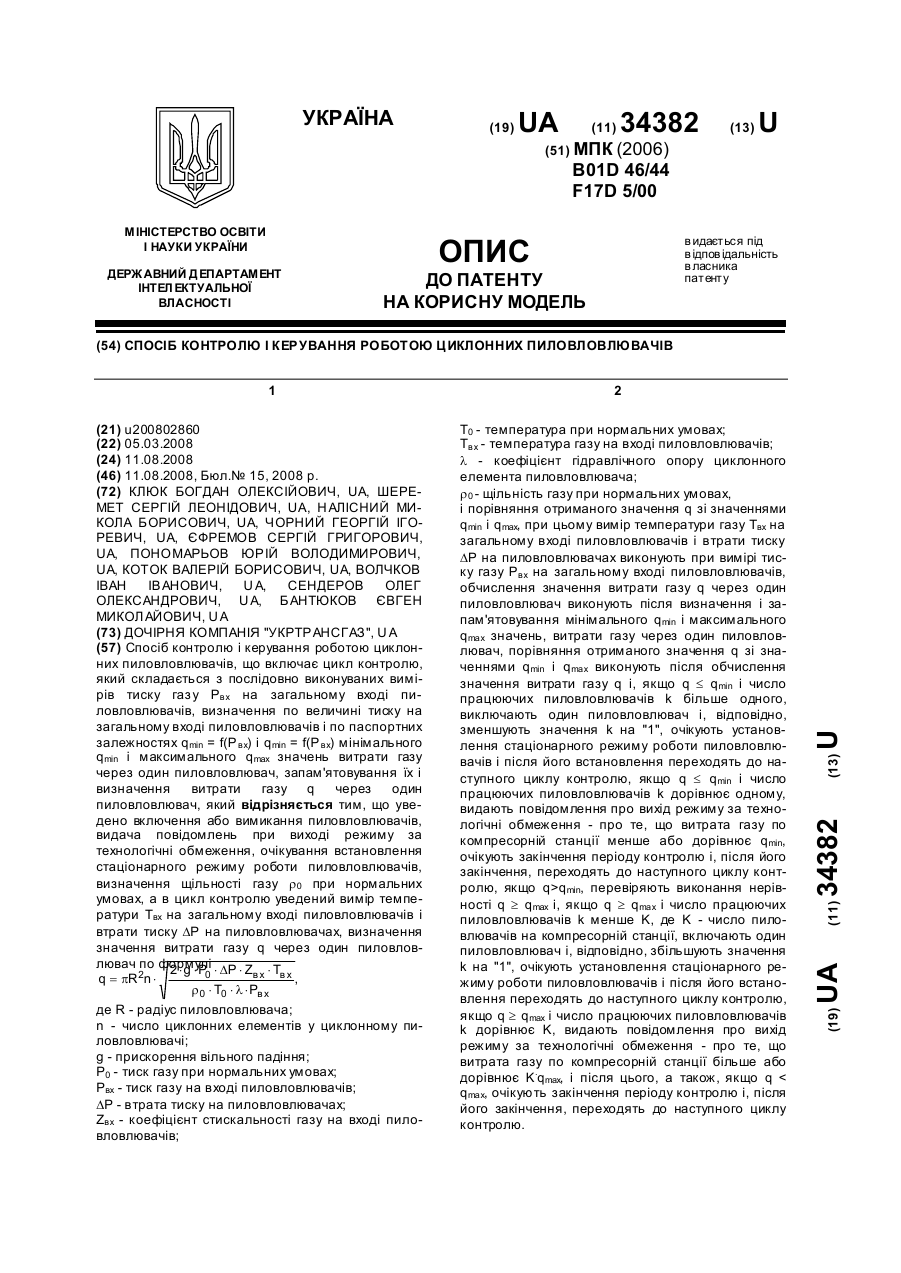
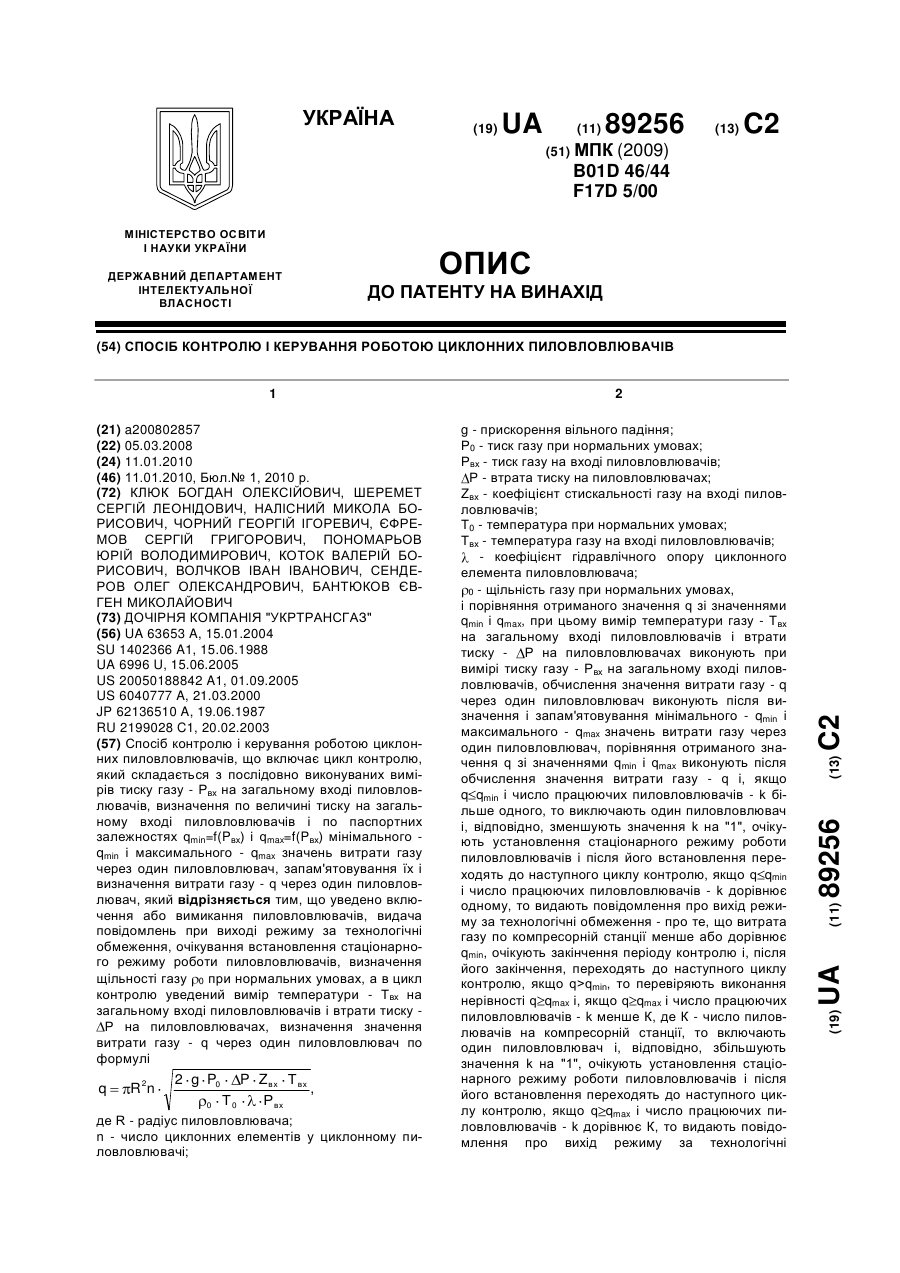
1. Пристрій контролю і керування роботою об'єкта, що включає мікропроцесорну систему керування, зв'язаний з виконавчими елементами, який відрізняється тим, що мікропроцесорна система зв'язана з комутуючим пристроєм вибору значень параметрів, які фіксуються мікропроцесорною системою і, відповідно, зі знімним запам'ятовуючим пристроєм. 2. Пристрій контролю і керування роботою об'єкта за п. 1, який відрізняється тим, що мікропроцесо 3 задану ретроспективу, а також можливість зміни поточних параметрів настроювань у залежності від експлуатаційних умов, що змінюються. Пристрій не передбачає можливість поновлення заданих профілів настроювань роботи об'єкта і його програмного забезпечення при їхній втраті, викликаними технологічними чи аварійними причинами. В основу корисної моделі поставлена задача удосконалення пристрою контролю :і керування роботою об'єкта за рахунок зв'язку мікропроцесорної системи керування зі знімним запам'ятовуючим пристроєм, а також, при необхідності, взаємодії з блоком збереження параметрів і профілів настроювань і з блоком завантаження програмного забезпечення. Технічний результат від використання корисної моделі досягається за рахунок можливості збереження поточних значень параметрів роботи об'єкта, виконання аналізу його поточної роботи, а також прогнозування з урахуванням зміни експлуатаційних умов. Пристрій дозволяє зберігати поточні настроювання роботи об'єкта, змінювати їх у залежності від умов експлуатації, а також змінювати чи відновлювати програмне забезпечення як мікропроцесорної системи керування в цілому, так і окремих елементів системи керування. Вирішення задачі удосконалення пристрою контролю і керування роботою об'єкта полягає в тім, що пристрій включає мікропроцесорну систему керування, зв'язаний з виконавчими елементами. Відповідно до корисної моделі, мікропроцесорна система зв'язана з комутуючим пристроєм вибору значень параметрів, які фіксуються мікропроцесорною системою і, відповідно, зі знімним запам'ятовуючим пристроєм. Для забезпечення можливості збереження і завантаження профілів настроювань, мікропроцесорна система керування обладнана і взаємодіє з блоком збереження параметрів і профілів настроювань, що взаємодіє зі знімним запам'ятовуючим пристроєм. Для зміни програмного забезпечення, що забезпечує реалізацію алгоритму роботи пристрою в залежності від конкретних умов експлуатації, а також можливості відновлення програмного забезпечення роботи мікропроцесорної системи, остання зв'язана з блоком завантаження програмного забезпечення зі знімного запам'ятовуючого пристрою. Для підвищення ефективності збереження параметрів і профілів настроювань при роботі пристрою, мікропроцесорна система керування взаємодіє з блоком збереження параметрів і профілів настроювань, що взаємодіє зі знімним запам'ятовуючим пристроєм, при цьому мікропроцесорна система керування зв'язана з блоком завантаження програмного забезпечення зі знімного запам'ятовуючого пристрою. Заявлена корисна модель ілюструється кресленнями, де на Фіг.1 показана блок - схема пристрою, де мікропроцесорна система зв'язана з комутуючим пристроєм і зі знімним запам'ятовуючим пристроєм; на Фіг.2 - блок - схема пристрою з мікропроцесорною системою керування послідовно взаємодіючої з блоком збереження параметрів і 48746 4 профілів настроювань і зі знімним запам'ятовуючим пристроєм; на Фіг.3 - блок - схема пристрою, де мікропроцесорна система керування зв'язана з блоком завантаження програмного забезпечення і знімним запам'ятовуючим пристроєм; на Фіг.4 блок - схема пристрою, де мікропроцесорна система керування взаємодіє з блоком збереження параметрів і профілів настроювань, зі знімним запам'ятовуючим пристроєм і блоком завантаження програмного забезпечення. Пристрій контролю і керування роботою об'єкта містить у собі сам об'єкт керування (1) як технічну систему, що виконує задані функції, що реалізують поставлену задачу. Об'єкт керування виконує свої функції за допомогою виконавчих елементів (2). Функціонування об'єкта керується за допомогою мікропроцесорної системи керування (3), що одержує інформацію про поточний стан об'єкта керування (1) і його виконавчих елементів (2) за допомогою датчиків (4). Інформація, отримана від датчиків (4), необхідна як для оцінки поточної роботи об'єкта (1), так і для внесення відповідник оптимізуючих коректив. Мікропроцесорна система керування (3), крім безпосереднього зв'язку з об'єктом керування (1) і датчиками (4), зв'язана з комутуючим пристроєм (5) (комутатором) вибору значень параметрів, за допомогою якого може здійснюватися формування інформаційних каналів з поточних значень параметрів роботи об'єкта (1). Комутатор (5) зв'язаний із блоком роботи зі знімним запам'ятовуючим пристроєм (6). Цей блок (6) являє собою електронно-механічний пристрій, що дозволяє фіксувати знімний запам'ятовуючій пристрій (7) і забезпечувати його зв'язок з мікропроцесорною системою. Мікропроцесорна система керування (3) може взаємодіяти з блоком збереження і завантаження профілів настроювань (8), що за допомогою блоку роботи зі знімним запам'ятовуючим пристроєм (6) у свою чергу зв'язане із самим знімним запам'ятовуючим пристроєм (7). Мікропроцесорна система керування (3) може бути зв'язана з блоком завантаження програмного забезпечення (9) зі знімного запам'ятовуючого пристрою (7). Мікропроцесорна система керування може взаємодіяти з блоком збереження і завантаження профілів настроювань (8), а також із блоком завантаження програмного забезпечення (9). Обоє ці блока (8) і (9) зв'язані з блоком роботи зі знімним запам'ятовуючим пристроєм (6) і за допомогою якого забезпечується прямий і зворотний зв'язок зі знімного запам'ятовуючого пристрою (7). Пристрій контролю і керування роботою об'єкта працює в такий спосіб. Заявлений пристрій є інтегрованим у систему керування і дозволяє одержувати всю необхідну об'єктивну інформацію в процесі його роботи. Отримана інформація може бути інтерпретована для поточного коректування роботи чи об'єкта для перспективного аналізу. Об'єкт (1) взаємодіє із системою керування (3). Ця взаємодія полягає в підтримці заданих режимів, що були визначені стосовно до конкретної виконуваної задачі. Виконання поставленої задачі 5 об'єктом керування (1) здійснюється за допомогою виконавчих елементів (2). Стан виконавчих елементів (2) і об'єкта керування (1) контролюється зa допомогою датчиків (4). Повнота інформації, що необхідна для керування роботою об'єкта (1), визначається кількістю датчиків, їхньою конструкцією і місцем розташування в об'єкті керування (1) і в його виконавчих елементах (2). Зовнішня інформація надходить у систему з різного роду датчиків (4) (цифровий і аналоговий типи), що перетворять її до заданого виду. Для аналізу цієї інформації за допомогою мікропроцесорної системи керування (3) селективно вибирають поточні значення параметрів роботи об'єкта (1) і фіксують їх на знімному запам'ятовуючому пристрої (7). Мікропроцесорна система керування (3) містить основну програму, що виконує всі операції по забезпеченню повного функціонування об'єкта (1) (експлуатованого пристрою). До цих операцій може бути віднесено: знімання інформації з датчиків (4), обробка, розрахунки, робота з пультом керування, зв'язок з виконавчими елементами об'єкта і інших пристроїв, видача керуючих впливів та інш. При необхідності мікропроцесорна система керування (3) може бути зв'язана з блоком завантаження програмного забезпечення (9) і профілів настроювань (3). Кожен мікропроцесорний пристрій має декілька параметрів, що керують його режимом роботи, контролем аварій та інш. Наприклад, номінальний струм двигуна, максимальний припустимий струм, форма кривої розгону/гальмування. Такі параметри називаються параметрами настроювання і звичайно вводяться з пульта керуванні під час налагодження пристрою. Блок профілів (8) настроювань дозволяє: - зберегти діючі настроювання мікропроцесорної системи (3) у виді профілю настроювань на карту пам'яті (7); - завантажити з карти пам'яті (7) готовий профіль настроювань і застосувати настроювання до даної системи (3) . Блок профілів настроювань (8) здійснює двонаправлену передачу даних (по шляху мікропроцесорна система (3) - знімний запам'ятовуючий пристрій (7) і по зворотному). Профіль настроювань (8) дозволяє зберегти більш ніж 65000 значень різних параметрів і являє собою таблицю цих параметрів, записану в знімний запам'ятовуючий пристрій (7). Також у задачі блоку профілів настроювань (8) входить перевірка поточного профілю на відповідність даному пристрою (1). Це зроблено для того, щоб запобігти ситуації, коли настроювання одного пристрою (наприклад, частотного перетворювача) записуються як настроювання іншого пристрою (наприклад., тиристорного перетворювача). Відновлення програмного забезпечення пристрою відбувається в наступних випадках: - виробником були розроблені нові функції; - при створенні програмного забезпечення були допущені помилки; - при роботі пристрою виникли несправності, що зашкодили основну програму, що стала неправильнопрацювати; 48746 6 - завантаження програмного забезпечення, що мають специфічні функції, що вимагаються в конкретному випадку. Блок завантаження (9) призначений для зміни основної програми зі знімного запам'ятовуючого пристрою (7). На блок завантаження (9) також покладені функції перевірки цілісності програмного забезпечення. При записі нового програмного забезпечення на знімний запам'ятовуючий пристрій (7) існує імовірність збою, у результаті якого запишеться некоректна програма, результат роботи якої на пристрої може бути непередбаченим. Для запобігання подібних ситуацій перед завантаженням нової програми блок завантаження (9) перевіряє її контрольну суму і завантажує її тільки в тому випадку, якщо вона збіглася. Крім того, при запуску пристрою (1) завантажник (9) робить перевірку цілісності програми, що використовується в якості основної. Якщо її контрольна сума не збігається, завантажник робить пошук неушкодженої версії програмного забезпечення в знімному запам'ятовуючому пристрої. При необхідності, в оператора керування об'єктом є можливість вибрати саме ту версію програмного забезпечення, що необхідна, або система буде завантажувати ту основну програму, що записана на знімний запам'ятовуючий пристрій (7) першою і пройшла перевірку на цілісність. Перелік параметрів для запису на знімний запам'ятовуючий пристрій визначають виходячи з необхідності одержання необхідного ступеня повноти інформації про роботу об'єкта (1). Із селективно обраної інформації формують інформаційні канали, що групують відповідно до передбаченого класифікуючого підходу. Відібрана інформацію фіксується у знімному запам'ятовуючому пристрої з можливістю подальшої візуалізації. Знімний запам'ятовуючий пристрій (7) може являти собою карту пам'яті, широко використовувану в сучасних електронних пристроях для збереження інформації. Область пам'яті знімного запам'ятовуючого пристрою можна розділити на три частини: - область збереження зареєстрованих даних; - область збереження програмного забезпечення; - область збереження профілів настроювань користувача. Крім зовнішньої інформації, будь-яка мікропроцесорна система містить ряд внутрішніх параметрів, що можуть бути результатами проміжних обчислень (максимальне значення обмірюваного струму за певний період роботи); непрямими оцінками невимірюваних величин (значення потокозчеплення ротора асинхронної машини); сигналами, виділеними з зовнішніх сигналів (відфільтровані цифровим фільтром значення обмірюваного змінного струму) та інш. І зовнішня, і внутрішня інформація по відношенню до мікропроцесорної системи є однорідною і може бути передана в блок роботи зі знімним запам'ятовуючим пристроєм (6) для наступного запису на сам знімний запам'ятовуючий пристрій (7). Роль блоку роботи зі знімним запам'ятовуючим пристроєм (6) у випадку реєстрації параметрів 7 полягає у формуванні з даних, які підлягають реєстрації, блоків для запису на карту пам'яті (7). Ці блоки складаються з безпосередньо самої реєструємої інформації і службової інформації. Для фіксації інформації мікропроцесорну систему (3) зв'язують комутуючим пристроєм (5) вибору значень параметрів, що фіксуються мікропроцесорною системою (3) і, відповідно, зі знімним запам'ятовуючим пристроєм (7). Таким чином, будь-яка зовнішня чи внутрішня поточна інформація, що міститься в мікропроцесорній системі керування (3), може бути записана на знімному запам'ятовуючому пристрої (7) для наступного перегляду, аналізу, обробки, збереження. У процесі роботи пристрою (1) можуть бути загублені чи помилково змінені настроювання, що забезпечують задані режими роботи, параметри захистів і обмежень у роботі пристрою стосовно до заданих умов. Для попередження цього, з параметрів настроювань роботи мікропроцесорної системи (3) і об'єкта (1) формують профіль настроювань, що фіксують у знімному запам'ятовуючому пристрої (7). При необхідності інформація може бути завантажена мікропроцесорною системою керування (3). Зазначена взаємодія здійснюється за рахунок того, що мікропроцесорну систему керування (3) з'єднують із блоком збереження параметрів і профілів настроювань (8). Взаємний обмін інформацією забезпечується за рахунок з'єднання блоку збереження параметрів і профілів настроювань (8) зі знімним запам'ятовуючим пристроєм (7). Крім утрати даних і профілів настроювань з технічних і технологічних причин, можуть виникнути збої в роботі об'єкта внаслідок збоїв у програмному забезпеченні. Крім цього, може виникнути необхідність зміни алгоритму робочих функцій об'єкта. Для цього мікропроцесорну систему і елементи системи керування можуть виконувати з можливістю завантаження програмного забезпечення зі знімного запам'ятовуючого пристрою (7). Це забезпечується: тим, що мікропроцесорну систему керування (3) зв'язують із блоком завантаження програмного забезпечення (9) зі знімного запам'ятовуючого пристрою (7). Заявлений пристрій може широко застосовуватися при ремонтно-налагоджувальних роботах. За допомогою цього пристрою можна, наприклад, простежити за пуском двигуна постійного струму, записавши струм і напругу якоря, показання тахогенератора, струм в обмотці збудження двигуна, параметри регулятора струму привода. По цих параметрах можна визначити стан двигуна і правильність роботи привода постійного струму. Також контролювати запуск, роботу і гальмування асинхронного двигуна під керуванням частотного перетворювача. Застосування пристроїв дозволяє зробити точне настроювання електронних систем керування, а також силових електричних частин технологічних об'єктів, що дозволяє домогтися кращої роботи і, як наслідок, зменшення тимчасових і енергетичних витрат. Пристрій дозволяє спостерігати не тільки за електричними процесами, але і при підключенні до нього необхідних датчиків, контролювати вагу, 48746 8 температуру, тиск технологічних процесів, відслідковувати положення контрольних кнопок і перемикачів. Крім налагоджувальних робіт і ремонту, пристрої можуть застосовуватися для виявлення причин несистематичних несправностей, що виникають без видимої причини в довільний час. Пристрій протягом заданого періоду часу може записати умови, при яких виникла аварія, а програмна візуалізація інформації дозволить переглянути і проаналізувати отримані дані. Відмінною рисою пристрою є його інтелектуальність і можливість адаптації для рішення конкретних задач. При експлуатації пристрою надаються наступні можливості: - автоматична передача інформації з вилучених контролерів при виході одного з контрольованих параметрів за межі встановленого допуску; - збір телеметричної інформації, як у добовому режимі, так і в режимі періодичного опитування з ініціативи диспетчерського центра, у тому числі і автоматично; - можливість підключення до різних лічильників і інших інтелектуальних пристроїв; - можливість використання бездротовому каналу зв'язку для передачі даних і здійснення керування; - збір аналогової інформації від датчиків: - збір інформації з датчиків з дискретним виходом ("сухий" контакт, дискретна зміна напруги постійного струму); - телекерування різними пристроями, такими як: електроприводи засувок, вакуумні вимикачі, пристрої насосної станції звукової сигналізації, висвітленню і т.п.; - аналогові виходи формування завдання (сигналу зворотного зв'язку) для електроприводів; - контроль вимірюваних параметрів; - модульна конструкція, можливість адаптації системи під конкретні умови; - синхронізація системного часу диспетчерського центра і системного часу вилучених контролерів; - проекті настроювання і конфігурування устаткування; - безупинна цілодобова робота з контролем мережевої напруги і автоматичним переходом на резервне джерело електроживлення. - збереження отриманих даних у знімному запам'ятовуючому пристрої пам'яті з більшою деталізацією, що дозволяє більш докладно відновити картину подій, і не втратити дані при відсутності зв'язку з диспетчерським центром; - відновлення програмного забезпечення апаратної частини системи за допомогою фірмової технології. Заявлений пристрій може бути використано як комплексний елемент системи оперативнодиспетчерського керування і збору даних. Вона призначена для рішення задач керування комплексами енергетичного устаткування, об'єктами транспортування нафти і газу, технологічними комплексами розподілу газу, тепла, води та інш. Цільовим призначенням подібних систем є опера 9 тивний збір даних про етан кожного об'єкта, відображення: цього стану (чи процесу, що відбувається) у реальному часі в найбільш зручному для сприйняття керуючого персоналу виді ї забезпечення своєчасної передачі команд керування. У залежності від специфіки об'єктів, також забезпечується виконання ряду інших функцій. Наприклад, програмного керування, ведення архівів, формування звітів та інше. Корисна модель може знайти застосування для рішення задач телемеханізації різних технологічних комплексів: - об'єкти водопостачання; - трансформаторні підстанції; - газорозподільні пункти і станції; - вузли обліку витрати електроенергії; - котельні. Заявлений пристрій може широко застосовуватися на кар'єрних екскаваторах. При установці реєстратора на машину можливі запис і аналіз наступних сигналів: напруги на якорях двигунів 48746 10 підйому, повороту, напору, струми в якірних обмотках і обмотках збудження двигунів підйому, повороту, напору. Струм в обмотці збудження синхронного двигуна. Підключення цих та інших необхідних сигналів виконується як прямо, так і через датчики, можливе підключення сигналів зі схеми керування приводами. Установка пристрою на екскаваторах дозволяє домогтися наступних результатів: - можливість накопления даних для ведення статистики по роботі машини; - прогнозування аварій, що значно знижує час простою машини в ремонті і дає можливість уникнути повної поломки механізму, обмежившись профілактичним ремонтом; - можливість точного настроювання електромашин і систем керування екскаватора після зборки нового чи капітального ремонту; - можливість спостереження за роботою машиніста екскаватора (аналіз простоїв, і некоректних режимів роботи). 11 Комп’ютерна верстка А. Крижанівський 48746 Підписне 12 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюVerifier and object operation control device
Автори англійськоюVorobeichyk Oleh Stanislavovych
Назва патенту російськоюУстройство контроля и управления работой объекта
Автори російськоюВоробейчик Олег Станиславович
МПК / Мітки
МПК: G05B 11/00
Мітки: об'єкта, роботою, керування, контролю, пристрій
Код посилання
<a href="https://ua.patents.su/6-48746-pristrijj-kontrolyu-i-keruvannya-robotoyu-obehkta.html" target="_blank" rel="follow" title="База патентів України">Пристрій контролю і керування роботою об’єкта</a>
Спосіб контролю і керування роботою циклонних пиловловлювачів
Номер патенту: 34382
Опубліковано: 11.08.2008
Автори: Пономарьов Юрій Володимирович, Єфремов Сергій Григорович, Волчков Іван Іванович, Шеремет Сергій Леонідович, Коток Валерій Борисович, Клюк Богдан Олексійович, Налісний Микола Борисович, Сендеров Олег Олександрович, Бантюков Євген Миколайович, Чорний Георгій Ігоревич
МПК: B01D 46/44, F17D 5/00
Мітки: роботою, керування, спосіб, циклонних, пиловловлювачів, контролю
Формула / Реферат:
Спосіб контролю і керування роботою циклонних пиловловлювачів, що включає цикл контролю, який складається з послідовно виконуваних вимірів тиску газу Рвх на загальному вході пиловловлювачів, визначення по величині тиску на загальному вході пиловловлювачів і по паспортних залежностях qmin = f(Рвх) і qmin = f(Рвх) мінімального qmin і максимального qmax значень витрати газу через один пиловловлювач, запам'ятовування їх і визначення витрати газу...
Спосіб контролю і керування роботою циклонних пиловловлювачів
Номер патенту: 89256
Опубліковано: 11.01.2010
Автори: Волчков Іван Іванович, Чорний Георгій Ігоревич, Клюк Богдан Олексійович, Єфремов Сергій Григорович, Налісний Микола Борисович, Сендеров Олег Олександрович, Шеремет Сергій Леонідович, Коток Валерій Борисович, Бантюков Євген Миколайович, Пономарьов Юрій Володимирович
МПК: F17D 5/00, B01D 46/44
Мітки: циклонних, пиловловлювачів, спосіб, керування, роботою, контролю
Формула / Реферат:
Спосіб контролю і керування роботою циклонних пиловловлювачів, що включає цикл контролю, який складається з послідовно виконуваних вимірів тиску газу - Рвх на загальному вході пиловловлювачів, визначення по величині тиску на загальному вході пиловловлювачів і по паспортних залежностях qmin=f(Pвх) і qmax=f(Pвх) мінімального - qmіn і максимального - qmax значень витрати газу через один пиловловлювач, запам'ятовування їх і визначення витрати...
Пристрій для контролю за роботою гральних автоматів
Номер патенту: 1046
Опубліковано: 17.09.2001
Автор: Мирослав Валента
МПК: G08C 17/00, H04B 7/00
Мітки: пристрій, контролю, автоматів, гральних, роботою
Формула / Реферат:
1. Пристрій для контролю за роботою гральних автоматів, який відрізняється тим, що утворений, щонайменше, одним модулем збирання і передачі інформації, який розміщений з підключенням до нього керованим гральним автоматом і з пристроєм мобільного телефонного зв'язку, сполученим, щонайменше, з одним сервером центральних файлів.2. Пристрій для контролю за роботою гральних автоматів за п.1, який відрізняється тим, що модуль збирання і...
Спосіб та пристрій для керування роботою виконавчого механізму
Номер патенту: 75894
Опубліковано: 15.06.2006
Автори: Нілссон Кеннез, Крістофферссон Ойріан, Андерссон Йорген, Хелмнер Андерс
МПК: H02P 4/00, H02P 7/06, H02P 7/00
Мітки: виконавчого, пристрій, роботою, механізму, керування, спосіб
Формула / Реферат:
1. Спосіб керування роботою блока приводу (16) для завантажувального транспортера (1), у якому:а) багаторазово знімають показання струму, подаваного на блок приводу (16);б) виконують перше порівняння, при якому показання струму порівнюють з першим максимальним рівнем, і у випадку, якщо кількість показань, що перевищують згаданий максимальний рівень, перевищує значення зупинки максимального рівня, відключають електроживлення...
Пристрій для гідравлічного керування у гідравлічній машині, призначений для керування роботою такого механічного пристрою як прес для обробки будь-якого матеріалу (варіанти)
Номер патенту: 80276
Опубліковано: 10.09.2007
Автори: Пост Карл-Гайнц, Клотер Андреас
МПК: F15B 11/00, B23D 15/00, B21D 28/02, F15B 21/00, F15B 13/04, B30B 15/00
Мітки: обробки, керування, гідравлічний, будь-якого, гідравлічного, роботою, призначений, прес, такого, варіанти, механічного, пристрій, матеріалу, пристрою, машини
Формула / Реферат:
1. Пристрій для гідравлічного керування у гідравлічній системі, призначеній для керування роботою такого механічного пристрою, як прес для обробки будь-якого матеріалу, особливо, для керування роботою ножиць для різання металобрухту, з гідравлічним засобом для більш високого встановлення максимального протитиску як засобу амортизації на боці кільцевої камери (1.1.1, 1.2.1) щонайменше першого циліндра (1.1, 1.2), який відрізняється тим, що під...
Попередній патент: Спосіб боротьби з бур’янами на посівах просапних культур
Наступний патент: Спосіб контролю і керування роботою об’єкта
Випадковий патент: Опорна тарілка для твердого сипкого матеріалу