G05B 11/00 — Автоматичні регулятори
Регулятор температури електронний
Номер патенту: 114431
Опубліковано: 12.06.2017
Автор: Мельникович Дмитро Іванович
МПК: G05B 11/00, G05B 13/04, G05D 23/19 ...
Мітки: регулятор, температури, електронний
Формула / Реферат:
Регулятор температури електронний, що містить вузол трансформатора, вузол випрямляча, вузол стабілізаторів напруги, вузол симістора, вузол нагрівача, один контакт якого під'єднано до виходу вузла симістора, а другий - до мережі 220 В,який відрізняється тим, що в нього додатково введені та послідовно під'єднані: датчик температури вузла датчика температури до входу вузла підсилювача, виходом вузла підсилювача до від'ємного входу...
Пристрій для управління з оптимальним значенням керуючого впливу в перехідному режимі
Номер патенту: 112686
Опубліковано: 26.12.2016
Автор: Смірнов Володимир Вікторович
МПК: G05B 11/00
Мітки: впливу, управління, значенням, пристрій, керуючого, перехідному, режимі, оптимальним
Формула / Реферат:
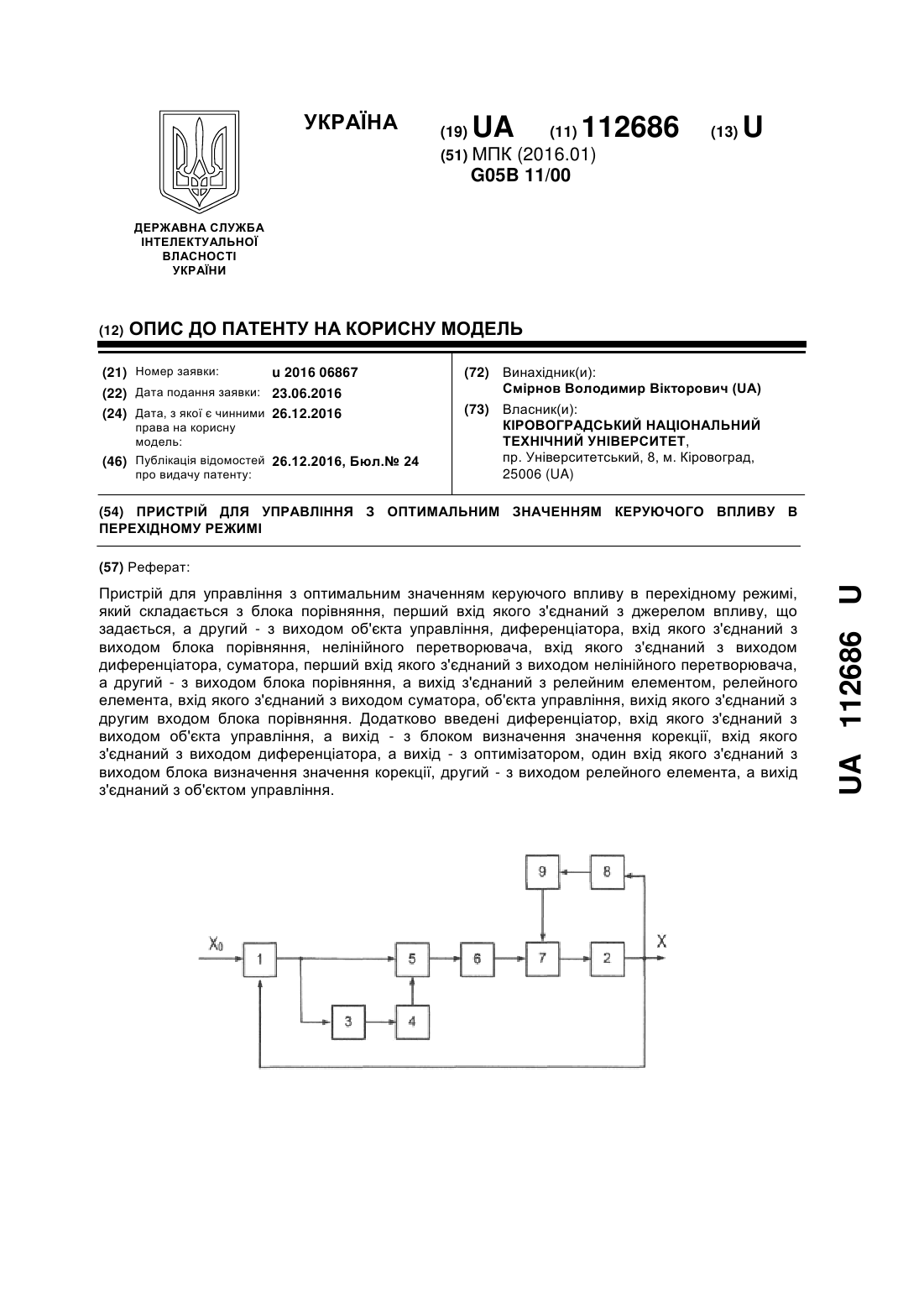
Пристрій для управління з оптимальним значенням керуючого впливу в перехідному режимі, який складається з блока порівняння, перший вхід якого з'єднаний з джерелом впливу, що задається, а другий - з виходом об'єкта управління, диференціатора, вхід якого з'єднаний з виходом блока порівняння, нелінійного перетворювача, вхід якого з'єднаний з виходом диференціатора, суматора, перший вхід якого з'єднаний з виходом нелінійного перетворювача, а...
Регулятор з динамічним коректором для об’єктів з часовою затримкою
Номер патенту: 107383
Опубліковано: 10.06.2016
Автори: Новіков Павло Валерійович, Ковриго Юрій Михайлович, Бунке Олександр Сергійович
МПК: G05B 11/00
Мітки: регулятор, коректором, часовою, затримкою, динамічним, об'єктів
Формула / Реферат:
Регулятор з динамічним коректором для об'єктів з часовою затримкою, що містить блок вхідних сигналів, фільтр вхідних сигналів, пропорційно-інтегральний регулятор, блок динамічної корекції вихідного сигналу, блок часової затримки, широтно-імпульсний модулятор, який відрізняється тим, що блок динамічної корекції містить блок фазування вхідних сигналів, базу правил, блок прийняття логічного рішення і блок дефазування вихідних сигналів, формуючи...
Спосіб позиціонування електропривода з підвищеною швидкодією
Номер патенту: 103025
Опубліковано: 25.11.2015
Автори: Тищенко Марина Олегівна, Старостін Сергій Станіславович
МПК: G05B 13/00, H02P 7/00, G05B 11/00 ...
Мітки: позиціонування, спосіб, швидкодією, електропривода, підвищеною
Формула / Реферат:
Спосіб позиціонування електропривода з підвищеною швидкодією, в якому застосовується пропорційний регулятор положення з підпорядкованими контурами регулювання частоти обертання та струму електродвигуна, який відрізняється тим, що фільтрацію відносно завдань на швидкість обертання та струм електродвигуна виконують корегуючими сигналами першої та другої похідної від сигналу завдання на положення, застосовують еталонну модель контуру...
Регулятор потужності нагрівачів (активного опору)
Номер патенту: 101421
Опубліковано: 10.09.2015
Автор: Мельникович Дмитро Іванович
МПК: G05B 11/00, G05B 7/02, G05F 1/12 ...
Мітки: регулятор, активного, опору, нагрівачів, потужності
Формула / Реферат:
Регулятор потужності нагрівачів, що містить вузол трансформатора, вузол випрямляча, вузол симістора, вузол нагрівача, один контакт якого під'єднано до виходу вузла симістора, а другий - до мережі 220 В, який відрізняється тим, що в регулятор потужності нагрівачів введені послідовно під'єднані:незгладженим виходом вузла випрямляча до входу формування синхроімпульсів вузла синхронізації, виходом сформованих синхроімпульсів вузла...
Пристрій електромагнітного багатопозиційного перемішування з індивідуальним регулюванням і контролем режиму роботи
Номер патенту: 89753
Опубліковано: 25.04.2014
Автори: Бунякіна Наталія Володимирівна, Стороженко Дмитро Олексійович, Дрючко Олександр Григорович, Іваницька Ірина Олександрівна
МПК: G05B 11/00, G05B 23/00
Мітки: електромагнітного, багатопозиційного, роботи, пристрій, режиму, контролем, перемішування, регулюванням, індивідуальним
Формула / Реферат:
Пристрій електромагнітного багатопозиційного перемішування з індивідуальним регулюванням і контролем режиму роботи, що містить систему магнітних елементів-змішувачів з їх приводом електромагнітним полем змінної частоти, який відрізняється тим, що пристрій перемішування містить касету котушок електромагнітів, багатоканальний каскадний електронний блок керування роботою позиційних систем електромагнітів перемішування окремих об'єктів,...
Пропорційно-інтегрально-диференційний регулятор з додатковою керуючою дією
Номер патенту: 104330
Опубліковано: 27.01.2014
Автори: Довгополий Ярослав Олександрович, Блонський Степан Денисович
МПК: G05B 11/00
Мітки: керуючою, дією, пропорційно-інтегрально-диференційний, регулятор, додатковою
Формула / Реферат:
Пропорційно-інтегрально-диференційний регулятор з додатковою керуючою дією, який включає блок порівняння, функціональні блоки пропорційного, інтегрального та диференційного перетворювання з відповідними пристроями для їх настройки, перший та другий суматори, при цьому вихід першого суматора з'єднаний з входом другого суматора, також регулятор додатково містить другий блок диференціювання, вихід якого з'єднаний з входом другого суматора, а...
Спосіб автоматичного регулювання технологічних параметрів
Номер патенту: 84939
Опубліковано: 11.11.2013
Автори: Олексієнко Галина Андріївна, Самедов Юсіф Фахрат огли
МПК: G05B 11/00
Мітки: регулювання, спосіб, технологічних, автоматичного, параметрів
Формула / Реферат:
Спосіб автоматичного регулювання технологічних параметрів, що включає формування керувальної дії у вигляді керувальних імпульсів максимальної потужності, визначення поточного значення похибки регулювання і вимірювання регульованої величини об'єкта, точне утримання заданого значення регульованої величини, яке здійснюють обчисленням значення основної керувальної дії з врахуванням похибки регулювання, який відрізняється тим, що поточне значення...
Спосіб автоматичного регулювання параметрів інерційних об’єктів із запізнюванням
Номер патенту: 67725
Опубліковано: 12.03.2012
Автори: Бунке Олександр Сергійович, Ковриго Юрій Михайлович, Коновалов Михайло Андрійович
МПК: G05B 11/00
Мітки: спосіб, автоматичного, параметрів, інерційних, регулювання, запізнюванням, об'єктів
Формула / Реферат:
Спосіб автоматичного регулювання параметрів інерційних об'єктів із запізнюванням, що полягає у формуванні керуючого сигналу за пропорційно-інтегральним законом регулювання мікропроцесорним контролером, який відрізняється тим, що керуючий сигнал формують у мікропроцесорному контролері за двоканальною структурою, при цьому швидкодію регулятора забезпечують виробленням форсуючого керуючого сигналу першим каналом згідно з функцією:
Спосіб автоматичного керування об’єктом
Номер патенту: 64738
Опубліковано: 10.11.2011
Автор: Пузько Ігор Данилович
МПК: G05B 11/00
Мітки: автоматичного, спосіб, об'єктом, керування
Формула / Реферат:
Спосіб автоматичного керування об'єктом, згідно з яким формують сигнал керувальної дії, пропорційний сумі абсолютних значень сигналів розгалуження і швидкості розгалуження, фіксують і запам'ятовують величину сигналу розгалуження і величину сигналу швидкості розгалуження при нульовому значенні сигналу розгалуження, який відрізняється тим, що формування сигналу керувальної дії проводять багатократно і в "швидкому" часі моделюванням N...
Диференціатор гідропневмомеханічних сигналів
Номер патенту: 62175
Опубліковано: 10.08.2011
Автори: Божок Аркадій Михайлович, Понеділок Вадим Віталійович
МПК: G05B 11/00
Мітки: диференціатор, сигналів, гідропневмомеханічних
Формула / Реферат:
Диференціатор гідропневмомеханічних сигналів, що містить підсумовуючий механізм у вигляді важеля з вихідною тягою, вузол приймання вхідних сигналів, з'єднаний через дросель з першим сильфоном і безпосередньо - з другим сильфоном через фланець, зв'язаний тягою з одним із кінців підсумовуючого важеля, а перший і другий сильфони і вузол приймання вхідних сигналів розміщені в окремих циліндричних напрямних втулках, жорстко зв'язаних з нерухомими...
Спосіб підвищення швидкості навчання систем термінального керування в умовах завад
Номер патенту: 60927
Опубліковано: 25.06.2011
Автори: Копилова Зінаїда Миколаївна, Іванов Борис Павлович, Кучеров Дмитро Павлович
МПК: G05B 13/00, G05B 11/00
Мітки: керування, спосіб, швидкості, підвищення, навчання, систем, завад, умовах, термінального
Формула / Реферат:
1. Спосіб підвищення швидкості навчання систем термінального керування в умовах завад, при якому в системі керування попередньо встановлюють вхідні дані, що включають завдання, припустиму похибку відпрацювання завдання об'єктом керування, дані про стан об'єкта керування, величину зсуву його координат, встановлюють також розв'язувальну функцію, початкові значення її вагових коефіцієнтів, початковий сигнал керування в системі, встановлюють...
Спосіб автоматичного керування об’єктом
Номер патенту: 57349
Опубліковано: 25.02.2011
Автор: Пузько Ігор Данилович
МПК: G05B 11/00, G05B 11/14
Мітки: об'єктом, спосіб, автоматичного, керування
Формула / Реферат:
Спосіб автоматичного керування об'єктом, за яким формують сигнал керувальної дії, пропорційний сумі абсолютних значень сигналів розгалуження і швидкості розгалуження, фіксують і запам'ятовують величину сигналу розгалуження і величину сигналу швидкості розгалуження при нульовому значенні сигналу розгалуження, який відрізняється тим, що при формуванні сигналу керувальної дії полярність останнього вибирають протилежною полярності сигналу...
Спосіб автоматичного керування позиційною електромеханічною системою
Номер патенту: 55903
Опубліковано: 27.12.2010
Автори: Побочій Володимир Григорович, Панкратов Анатолій Іванович
МПК: G05B 11/00
Мітки: керування, спосіб, автоматичного, позиційною, системою, електромеханічною
Формула / Реферат:
Спосіб автоматичного керування позиційною електромеханічною системою, що включає керування по відхиленню від завдання й визначення поточних значень змінних стану електромеханічної системи, подачі n отриманих сигналів на n входів нейронної мережі, помноженню кожного з них на коефіцієнти ваги, який відрізняється тим, що додатково по кожній із змінних стану у блоці фазифікації фазі-контролера формують функції приналежностей, які перетворюють в...
Спосіб адаптивного керування з настроюваною моделлю в системах термінального керування
Номер патенту: 54135
Опубліковано: 25.10.2010
Автори: Мельник Олександр Дмитрович, Кузьменко Тетяна Петрівна, Іванов Борис Павлович, Кучеров Дмитро Павлович, Копилова Зінаїда Миколаївна, Чікалов Микола Андрійович
МПК: G05B 13/00, G05B 11/00
Мітки: системах, моделлю, настроюваною, спосіб, адаптивного, термінального, керування
Формула / Реферат:
1. Спосіб адаптивного керування з настроюваною моделлю в системах термінального керування, що включає попереднє встановлення в системі керування вхідних даних, що містять завдання, припустиму похибку відпрацювання завдання об'єктом керування, дані про стан об'єкта керування, розв'язувальну функцію, початкові значення її вагових коефіцієнтів, початковий сигнал керування в системі та в процесі руху вимірюють координати об'єкта керування,...
Універсальний мікропроцесорний контролер
Номер патенту: 54042
Опубліковано: 25.10.2010
Автори: Коновалов Михайло Андрійович, Ковриго Юрій Михайлович, Голінко Ігор Михайлович, Бунке Олександр Сергійович
МПК: G05B 11/00
Мітки: контролер, універсальний, мікропроцесорний
Формула / Реферат:
Універсальний мікропроцесорний контролер, який містить послідовно з'єднані пристрої вводу-виводу інформації, аналого-цифровий перетворювач, перший перетворювач-суматор, фільтр, другий суматор, цифровий обчислювальний пристрій та вихідний елемент для формування основного закону керування виконавчим механізмом, який відрізняється тим, що функціональна структура універсального мікропроцесорного контролера містить трипозиційний нелінійний...
Спосіб адаптивного управління динамічним об’єктом в системах термінального управління
Номер патенту: 51941
Опубліковано: 10.08.2010
Автори: Кучеров Дмитро Павлович, Копилова Зінаїда Миколаївна, Іванов Борис Павлович, Мельник Олександр Дмитрович
МПК: G05B 13/00, G05B 11/00
Мітки: адаптивного, об'єктом, динамічним, системах, спосіб, термінального, управління
Формула / Реферат:
Спосіб адаптивного управління динамічним об'єктом в системах термінального управління, за яким в системі керування встановлюють вхідні дані, що включають бажану похибку відпрацювання завдання об'єктом керування, вхідні дані про кінцевий та початковий стан об'єкта керування, початкові значення вагових коефіцієнтів контролера, значення початкового керування в системі термінального управління, та в процесі руху вимірюють координати об'єкта...
Спосіб автоматичного керування об’єктом
Номер патенту: 50477
Опубліковано: 10.06.2010
Автор: Пузько Ігор Данилович
МПК: G05B 11/00
Мітки: керування, автоматичного, об'єктом, спосіб
Формула / Реферат:
Спосіб автоматичного керування об'єктом, за яким формують сигнал керувальної дії, пропорційний сумі абсолютних значень сигналів розгалуження і швидкості розгалуження, аналізують знак сигналу розгалуження та формують знак сигналу керувальної дії протилежним за полярністю знаку сигналу розгалуження, фіксують і запам'ятовують величину сигналу розгалуження з наступним інвертуванням сигналу керувальної дії в момент часу, в який величина сигналу...
Спосіб навчання динамічної системи термінальному управлінню в умовах завад
Номер патенту: 49937
Опубліковано: 11.05.2010
Автори: Іванов Борис Павлович, Мельник Олександр Дмитрович, Кучеров Дмитро Павлович, Левицький Ігор Святославович, Копилова Зінаїда Миколаївна, Комаров Володимир Олексадрович, Сендецький Микола Миколайович
МПК: G05B 13/00, G05B 11/00
Мітки: системі, термінальному, динамічної, завад, навчання, умовах, управлінню, спосіб
Формула / Реферат:
1. Спосіб навчання динамічної системи термінальному управлінню в умовах завад, при якому попередньо в системі керування встановлюють вхідні дані, які включають бажану похибку відпрацювання завдання об'єктом керування, дані про стан об'єкта, початкове значення вагового коефіцієнта, розв'язувальну функцію, початковий сигнал керування в системі, коефіцієнт підсилення алгоритму навчання, після зазначеного обчислюють розв'язувальну функцію,...
Спосіб виключення впливу обмежених за амплітудою завад в системах термінального керування
Номер патенту: 90385
Опубліковано: 26.04.2010
Автори: Копилова Зінаїда Миколаївна, Левицький Ігор Святославович, Богучарський В''ячеслав Вікторович, Коров'яков Андрій Борисович, Кучеров Дмитро Павлович, Кирієнко Володимир Володимирович
МПК: G05B 11/00, G05B 13/00
Мітки: впливу, завад, спосіб, системах, обмежених, амплітудою, термінального, керування, виключення
Формула / Реферат:
Спосіб виключення обмежених за амплітудою сигналів завад в системах термінального керування, за яким в системі керування встановлюють вхідні дані, що включають бажану похибку відпрацювання завдання об'єктом керування, дані про стан об'єкта керування, значення вагових коефіцієнтів контролера, початковий сигнал керування в системі термінального керування, та в процесі руху вимірюють координати об'єкта керування, відхилення поточного стану...
Спосіб контролю і керування роботою об’єкта
Номер патенту: 48747
Опубліковано: 25.03.2010
Автор: Воробейчик Олег Станіславович
МПК: G05B 11/00
Мітки: контролю, керування, спосіб, роботою, об'єкта
Формула / Реферат:
1. Спосіб контролю і керування роботою об'єкта, що включає фіксацію інформації про стан об'єкта і його системи керування, вплив на об'єкт керування виконавчим елементом, керованим мікропроцесорною системою відповідно до прийнятих параметрів настроювань, який відрізняється тим, що за допомогою мікропроцесорної системи керування селективно вибирають поточні значення параметрів роботи об'єкта, з них формують інформаційні канали і фіксують їх у...
Пристрій контролю і керування роботою об’єкта
Номер патенту: 48746
Опубліковано: 25.03.2010
Автор: Воробейчик Олег Станіславович
МПК: G05B 11/00
Мітки: об'єкта, контролю, пристрій, керування, роботою
Формула / Реферат:
1. Пристрій контролю і керування роботою об'єкта, що включає мікропроцесорну систему керування, зв'язаний з виконавчими елементами, який відрізняється тим, що мікропроцесорна система зв'язана з комутуючим пристроєм вибору значень параметрів, які фіксуються мікропроцесорною системою і, відповідно, зі знімним запам'ятовуючим пристроєм.2. Пристрій контролю і керування роботою об'єкта за п. 1, який відрізняється тим, що мікропроцесорна...
Пристрій для автоматичного регулювання рідини за максимальною її витратою
Номер патенту: 89556
Опубліковано: 10.02.2010
Автор: Демков Олександр Ілліч
МПК: G05B 11/00, G05D 7/00
Мітки: витратою, автоматичного, рідини, пристрій, регулювання, максимальною
Формула / Реферат:
1. Пристрій для автоматичного регулювання рідини за максимальною її витратою, що містить підвідний і відвідний трубопроводи, відкриту зверху регулюючу ємність та поплавець, який відрізняється тим, що підвідний трубопровід входить в регулюючу ємність і має строго вертикальну ділянку труби, кінець якої заглушений герметично, верхня частина вертикальної труби має перфоровану ділянку, загальний переріз перфорованих отворів у трубі у 1,5-3 рази...
Регулюючий мікропроцесорний контролер
Номер патенту: 44799
Опубліковано: 12.10.2009
Автори: Голінко Ігор Михайлович, Бунке Олександр Сергійович, Коновалов Михайло Андрійович, Ковриго Юрій Михайлович
МПК: G05B 11/00
Мітки: регулюючий, контролер, мікропроцесорний
Формула / Реферат:
Регулюючий мікропроцесорний контролер, що містить послідовно з'єднані пристрої вводу-виводу інформації, аналого-цифровий перетворювач, суматор, фільтр, цифровий обчислювальний пристрій для формування функціональної структури керування виконавчим механізмом і широтно-імпульсний модулятор, який відрізняється тим, що цифровий обчислювальний пристрій містить перший швидкодіючий канал керування; функціональна структура (ФС1) якого реалізує...
Нелінійний автоматичний регулятор
Номер патенту: 42721
Опубліковано: 27.07.2009
Автор: Коновалов Михайло Андрійович
МПК: G05B 11/00
Мітки: автоматичний, нелінійний, регулятор
Формула / Реферат:
Нелінійний автоматичний регулятор, що містить електронний регулюючий блок з релейним виходом, охоплений RC-контуром гнучкого зворотного зв'язку для формування основного закону регулювання, який відрізняється тим, що електронний регулюючий блок нелінійного регулятора додатково охоплений другим інерційним RC-контуром гнучкого зворотного зв'язку, що містить нелінійний фільтр із напівпровідникових елементів (діодів та стабілітронів), включених...
Золотниковий регулятор
Номер патенту: 37695
Опубліковано: 10.12.2008
Автори: Пономаренко Олександр Валерійович, Байракова Юлія Олегівна, Ковальов Віктор Дмитрович
МПК: G05B 11/00, F16C 17/00
Мітки: золотниковий, регулятор
Формула / Реферат:
Золотниковий регулятор, що містить корпус, вхідне і вихідне сопла та золотник з гвинтовою канавкою, який відрізняється тим, що золотник зв'язаний з якорем лінійного електродвигуна, при цьому якір знаходиться у порожнині статора та має обмотку збудження на постійних магнітах, які створюють магнітне поле.
Спосіб настроювання вагових коефіцієнтів системи “adaline” при керуванні динамічними об’єктами
Номер патенту: 81997
Опубліковано: 25.02.2008
Автори: Богучарський В''ячеслав Вікторович, Рудаков Володимир Іванович, Кучеров Дмитро Павлович, Турчин Валентин Миколайович, Гупало Андрій Юрійович, Чіпіжко Юрій Анатолійович
МПК: G05B 11/00, G05B 13/00
Мітки: об'єктами, вагових, настроювання, спосіб, системі, adaline, керуванні, динамічними, коефіцієнтів
Формула / Реферат:
Спосіб настроювання вагових коефіцієнтів системи "Adaline" при керуванні динамічними об'єктами, за яким в системі керування встановлюють вхідні дані, які включають потрібну похибку відпрацювання завдання динамічним об'єктом, початковий вектор настроюваних параметрів та початковий стан динамічного об'єкта, що відповідає еталонній вирішальній функції системи "Adaline", вимірюють координати динамічного об'єкта, за...
Спосіб регулювання всережимним оптимальним регулятором
Номер патенту: 81794
Опубліковано: 11.02.2008
Автор: Дорфман Едуард Борисович
МПК: G05B 11/00
Мітки: оптимальним, регулювання, спосіб, всережимним, регулятором
Формула / Реферат:
Спосіб регулювання всережимним оптимальним регулятором зі скиданням попереджуючого впливу, згідно з яким підсилювач вводять в автоколивання, величина амплітуди яких менша від порога спрацьовування вихідного релейного елемента, який відрізняється тим, що автоколиваннями керують за допомогою вихідного сигналу підсилювача, який пропускають через елемент петльової нелінійності, та за допомогою швидкості зміни сигналу цього виходу шляхом...
Машина для очищення і нанесення захисного покриття магістральних трубопроводів
Номер патенту: 81320
Опубліковано: 25.12.2007
Автори: Ротачов Юрій Васильович, Павлюк Володимир Миколайович, Дьомін Юрій Миколайович, Іткін Олександр Феліксович, Карпачов Юрій Андрійович, Гольденберг Анатолій Менделевич
МПК: B08B 9/02, G05B 11/00, F16L 59/00 ...
Мітки: покриття, трубопроводів, нанесення, машина, очищення, захисного, магістральних
Формула / Реферат:
Машина для очищення і нанесення захисного покриття магістральних трубопроводів, що містить механізм поздовжнього переміщення її по трубі, виконаний у вигляді колісного візка, механічно з'єднаного з електроприводом, установлений на візку неповноповоротний реверсний механізм, який складається із ротора з розпилювачами матеріалів і електромеханічного приводу, з'єднаного з ним за допомогою ланцюгової передачі, та систему керування, яка...
Слідкуюча система
Номер патенту: 79546
Опубліковано: 25.06.2007
Автори: Корсун Валентин Петрович, Стеба Олександр Михайлович, Стефанович Віктор Тарасович, Кралін Володимир Всеволодович, Мотуз Георгій Іванович
МПК: G05B 11/00, G05B 11/01
Формула / Реферат:
Слідкуюча система, яка включає вимірювач неузгодженості, перший і другий суматори, перший і другий перетворювачі "код-напруга", підсилювач, двигун, датчик кута, функціональний кодуючий перетворювач і коректуючий блок, до складу якого входять блок масштабуючого коефіцієнта, перший і другий випрямляючі модулі, пороговий компаратор і блок множення, при цьому вихід першого суматора через перший перетворювач «код-напруга» підключений до...
Позиційна сервосистема
Номер патенту: 78637
Опубліковано: 10.04.2007
Автори: Богучарський В''ячеслав Вікторович, Чіпіжко Юрій Анатолійович, Трач Віктор Іванович, Гамалій Наталія Вікторівна, Євстаф''єв Євген Володимирович, Кучеров Дмитро Павлович
МПК: G05B 11/00, H02P 6/00, G05G 19/00 ...
Мітки: сервосистема, позиційна
Формула / Реферат:
Позиційна сервосистема, яка містить керуючу частину, що складається з формувача вектора стану, пристрою стикування з шиною локальної системи керування, обчислювача різниці, регулятора положення та суматора, виконавчу частину, що складається з підсилювача-комутатора, виконавчого двигуна, редуктора та об'єкта регулювання, канал вимірювання, що складається з датчиків швидкості та положення, при цьому вихід формувача вектора стану зв'язано з...
Слідкуюча система
Номер патенту: 78405
Опубліковано: 15.03.2007
Автори: Стеба Олександр Михайлович, Мотуз Георгій Іванович, Кралін Володимир Всеволодович, Стефанович Віктор Тарасович, Корсун Валентин Петрович
МПК: G05B 11/01, G05B 11/00
Формула / Реферат:
Слідкуюча система, яка включає вимірювач неузгодженості, перший суматор, перший і другий перетворювачі "код-напруга", підсилювач, двигун, датчик кута, функціональний кодуючий перетворювач і коректуючий блок, до складу якого входять другий суматор, випрямний модуль і пороговий компаратор, при цьому вихід першого перетворювача "код-напруга" з'єднаний з неінвертуючим першим входом першого суматора, вихід якого через...
Оптична зі зворотним зв’язком слідкуюча система з позиціювання об’єкта
Номер патенту: 75216
Опубліковано: 15.03.2006
Автори: Парняков Євген Серафимович, Мухаммад Рашик Улла Бейг Мирза
МПК: G05B 11/00
Мітки: оптична, позиціювання, слідкуюча, об'єкта, зворотним, система, зв'язком
Формула / Реферат:
Оптична зі зворотним зв'язком слідкуюча система з позиціювання об'єкта, яка включає послідовно з'єднану нелінійну з зоною нечутливості ланку – позиційований об’єкт з відбиваючим елементом, наприклад дзеркалом, який встановлено на об’єкті позиціювання, вимірювач неузгодженості, підсилювач, блок формування сигналу керування і виконавчий привід, яка відрізняється тим, що в ній паралельно з вимірювачем неузгодженості приєднаний блок формування...
Слідкуюча система
Номер патенту: 63756
Опубліковано: 15.08.2005
Автори: Мотуз Георгій Іванович, Корсун Валентин Петрович, Стефанович Віктор Тарасович, Стеба Олександр Михайлович, Орляк Микола Васильович, Старков Юрій Володимирович, Кралін Володимир Всеволодович
МПК: G05B 11/01, G05B 11/00
Формула / Реферат:
Лінійний хвильовий п'єзоелектричний двигун, що містить дві притиснуті одна до одної однією або двома плоскими фрикційними поверхнями дві частини з можливістю їх взаємного зміщення, одна з яких є п'єзоелемент у формі бруска з трьома парами електродів на плоских протилежних поверхнях, крайні з яких перехресно з'єднані між собою, між якими розміщена третя пара електродів, який відрізняється тим, що брусок виконаний з одного матеріалу постійного...
Спосіб оптимізації перехідного процесу у системі автоматичного регулювання та пристрій для його реалізації
Номер патенту: 62734
Опубліковано: 15.08.2005
Автори: Мотуз Георгій Іванович, Демченко Леонтій Іванович, Корсун Валентин Петрович, Кралін Володимир Всеволодович, Старков Юрій Володимирович
МПК: G05B 11/01, G05B 11/00
Мітки: системі, пристрій, перехідного, оптимізації, реалізації, спосіб, процесу, регулювання, автоматичного
Формула / Реферат:
Засіб для лікування і профілактики гострих респіраторних хвороб молодняку сільськогосподарських тварин містить тримекаїн, наповнювач, розчинник. Додатково засіб містить тимол, хладон, як наповнювач - гліцерин, як розчинник- спирт етиловий.
Стабілізатор тиску
Номер патенту: 49930
Опубліковано: 15.10.2002
Автори: Анісімов Володимир Алексійович, Нестеренко Ольга Петрівна, Авласенко Леонід Володимирович, Конох Володимир Іванович
МПК: F02K 11/00, G05B 11/00, G05D 16/06 ...
Мітки: стабілізатор, тиску
Формула / Реферат:
Стабілізатор тиску, в корпусі якого розташоване сопло, що взаємодіє з заслінкою, чутливий елемент, виконаний у вигляді пружної мембрани, вихідна та керуюча порожнини, який відрізняється тим, що в корпусі додадково розміщені дві пружні діафрагми з отворами для проходу робочого середовища, штовхач в вихідній порожнині, підпружинений плунжер з отворами і його напрямною в стакані, заслінка з глухим отвором, закріплена на одній діафрагмі, причому...
Пропорційний розподільник

Номер патенту: 39837
Опубліковано: 15.06.2001
Автори: Мушкаєв Ярослав Володимирович, Ремень Валентин Іванович, Осенін Юрій Іванович
МПК: G05B 11/00, F15C 3/00
Мітки: розподільник, пропорційний
Формула / Реферат:
Пропорційний розподільник, що містить розташовані в корпусі дві еластичні мембрани, на яких підвішені клапані, шток, на якому встановлено заслінки, камери управління, скидання, живлення і виходу робочого середовища, який відрізняється тим, що містить керуючу мембрану, яка розташована між камерами управління, на жорсткому центрі якої закріплено шток, заслінки штока є сідлами двох протилежно направлених порожніх клапанів живлення і скидання...
Автоматичний регулятор непрямої дії
Номер патенту: 15111
Опубліковано: 30.06.1997
Автор: Музичук Федір Максимович
МПК: G05B 11/00, G06G 3/00
Мітки: дії, регулятор, непрямо, автоматичний
Формула / Реферат:
Автоматический регулятор непрямого действия, содержащий снабженный стержневой муфтой, с осью качения измеритель отклонения регулируемого параметра, связанный со стержневой муфтой через ось качения двуплечий рычаг обратной связи, кинематически связанный с одним концом двуплечего рычага обратной связи управляющий потоками рабочей жидкости отсечной золотник, корпус-втулка которого связана с винтовым механизмом настройки автоматического...
Сигналізатор витоку горючих газів
Номер патенту: 14825
Опубліковано: 18.02.1997
Автори: Кузнєцов Олексій Іванович, Муляєв Олег Леонидович, Мурга Володимир Анатолійович
МПК: G05B 11/00
Мітки: сигналізатор, газів, витоку, горючих
Формула / Реферат:
Сигнализатор утечки горючих газов, снабженный силовым трансформатором, сетевая обмотка которого через токовый ограничитель соединена с первой, второй входными клеммами электропитания, отличающийся тем, что в него введены семь понижающих обмоток, двадцать один разделительный диод, пятнадцать конденсаторов, восемь стабилитронов, двадцать токозадающих резисторов, шесть ключевых транзисторов, шесть настроечных резисторов, два светодиода, три...
Цифрова система управління наведенням рухомого об’єкта
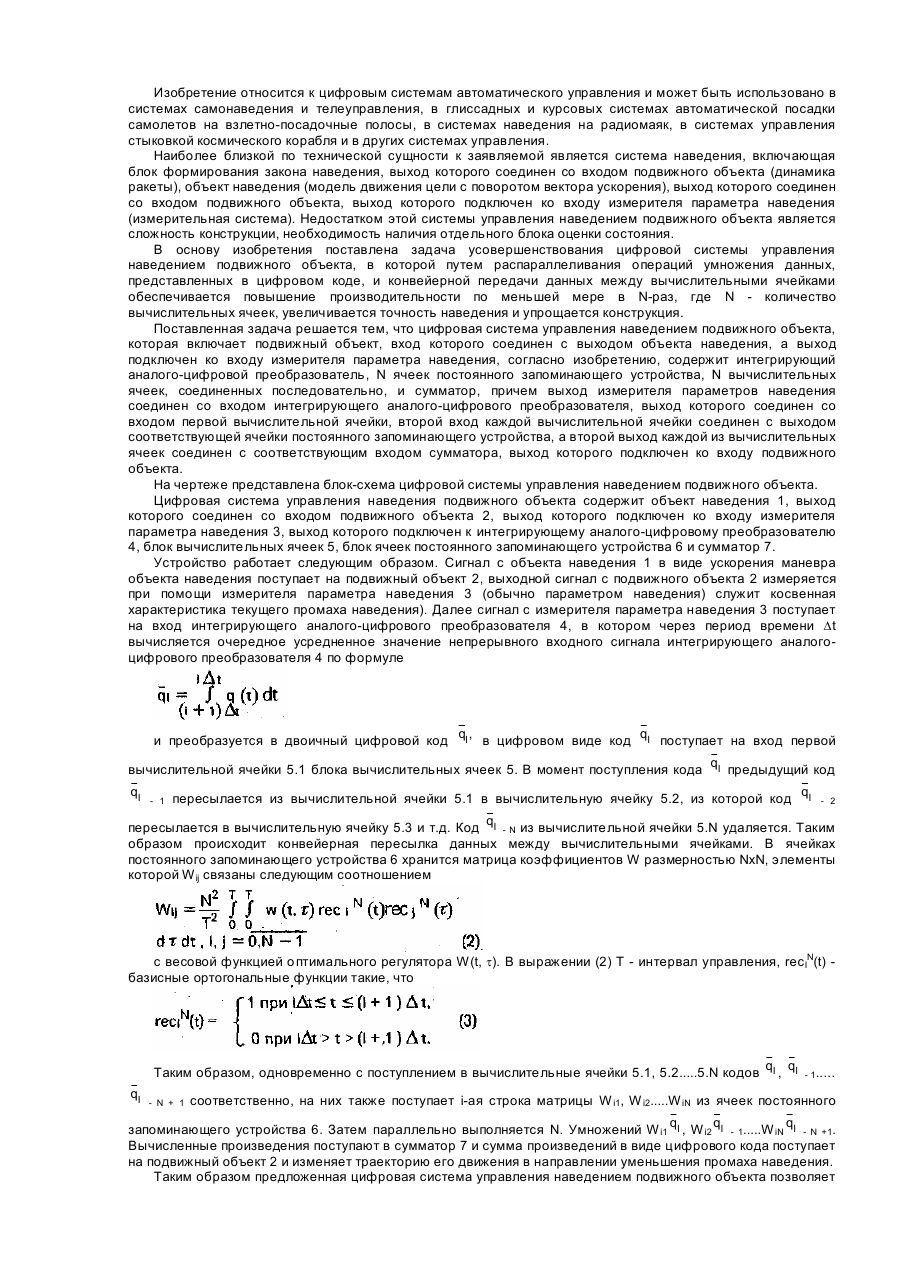
Номер патенту: 10677
Опубліковано: 25.12.1996
Автори: Сокол Сергій Олексійович, Тунік Анатолій Азарійович
МПК: G05B 11/00
Мітки: система, цифрова, наведенням, рухомого, об'єкта, управління
Формула / Реферат:
Цифровая система управления наведением подвижного объекта, включающая подвижный объект, вход которого соединен с выходом объекта наведения, а выход подключен ко входу измерителя параметра наведения, отличающаяся тем, что она содержит интегрирующий аналого-цифровой преобразователь, N ячеек постоянного запоминающего устройства, N вычислительных ячеек, соединенных последовательно, и сумматор, причем выход измерителя параметра наведения...