Спосіб автоматичної фіксації колінного вузла протеза та пристрій для його здійснення
Номер патенту: 49079
Опубліковано: 16.09.2002
Автори: Чернишенко Олександр Андрійович, Палагін Віктор Андрійович, Красюк Георгій Васильович, Молчанов Володимир Володимирович, Невлюдов Ігор Шакірович, Горлєвський Станіслав Едуардович, Бублій Валентин Володимирович, Семенець Валерій Васильович, Дзюндзюк Борис Васильович

Формула / Реферат
1. Спосіб автоматичної фіксації колінного вузла протеза, що включає заклинювання та розклинювання ведучого та веденого клинів, які сполучені з гомілкою та стегном відповідно, з використанням опор котіння, при цьому керує заклинюванням-розклинюванням виделка, який відрізняється тим, що підкосостійкість забезпечується за рахунок заклинювання при будь-якому повороті веденого клина відносно ведучого клина на спільній осі в межах сектора, величину якого визначає максимальний кут згинання протеза у фазі переносу, а заклинювання-розклинювання відбувається за рахунок дії зворотно-поступального руху виделки відносно тіл котіння, а саме під дією зусилля опору на стопу виделка переміщується у положення, в якому відбувається заклинювання, а під дією зусилля зворотної пружини та ваги гомілки у фазі переносу протеза виделка повертається у вихідне положення та відбувається розклинювання.
2. Пристрій для автоматичної фіксації колінного вузла протеза, який містить дві шарнірно закріплені опори верхнього й нижнього вузлів кріплення, замковий пристрій з клином та тілами кочення, пружини стиску, який відрізняється тим, що в нього додатково введено корпус шарнірно з'єднаний осями з вузлами кріплення і має клиновий майданчик, корпус підпружинений двома пружинами з верхнім вузлом кріплення, який має дві бокові секторні щоки та упор, що регулюється, а замковий пристрій виконано по типу обгінної муфти двосторонньої дії, клинові поверхні муфти утворені клиновим майданчиком корпусу та секторними щоками верхнього вузла кріплення, між клиновими поверхнями розміщені тіла кочення у вигляді двох роликів, що стягуються двома пружинами і можуть одночасно контактувати з клиновим майданчиком та секторними щоками верхнього вузла кріплення, а також введено балансир, який містить у собі нижній вузол кріплення.
3. Колінний механізм по п. 2, який відрізняється тим, що у склад балансира додатково входять рухомо встановлені у отворах корпусу передній та дорзальний (задній) підпружинені пальці, які розміщені по обидва боки від опорної осі нижнього вузла кріплення, при цьому передній палець виконано як одне ціле з двостороннім клином, який має можливість переміщення обох роликів замкового пристрою одне до одного під дією пружин, що стягують ролики, для заклинювання або розштовхуються клином для розгальмовування, коли відсутнє вертикальне навантаження.
4. Колінний механізм по п. 2, який відрізняється тим, що регулювання упора верхнього вузла кріплення виконано гвинтовим з можливістю зміни його довжини для зміни кута підгинання гомілки протеза під час контакту з дорзальним пальцем балансира в опорний період кроку.
Текст
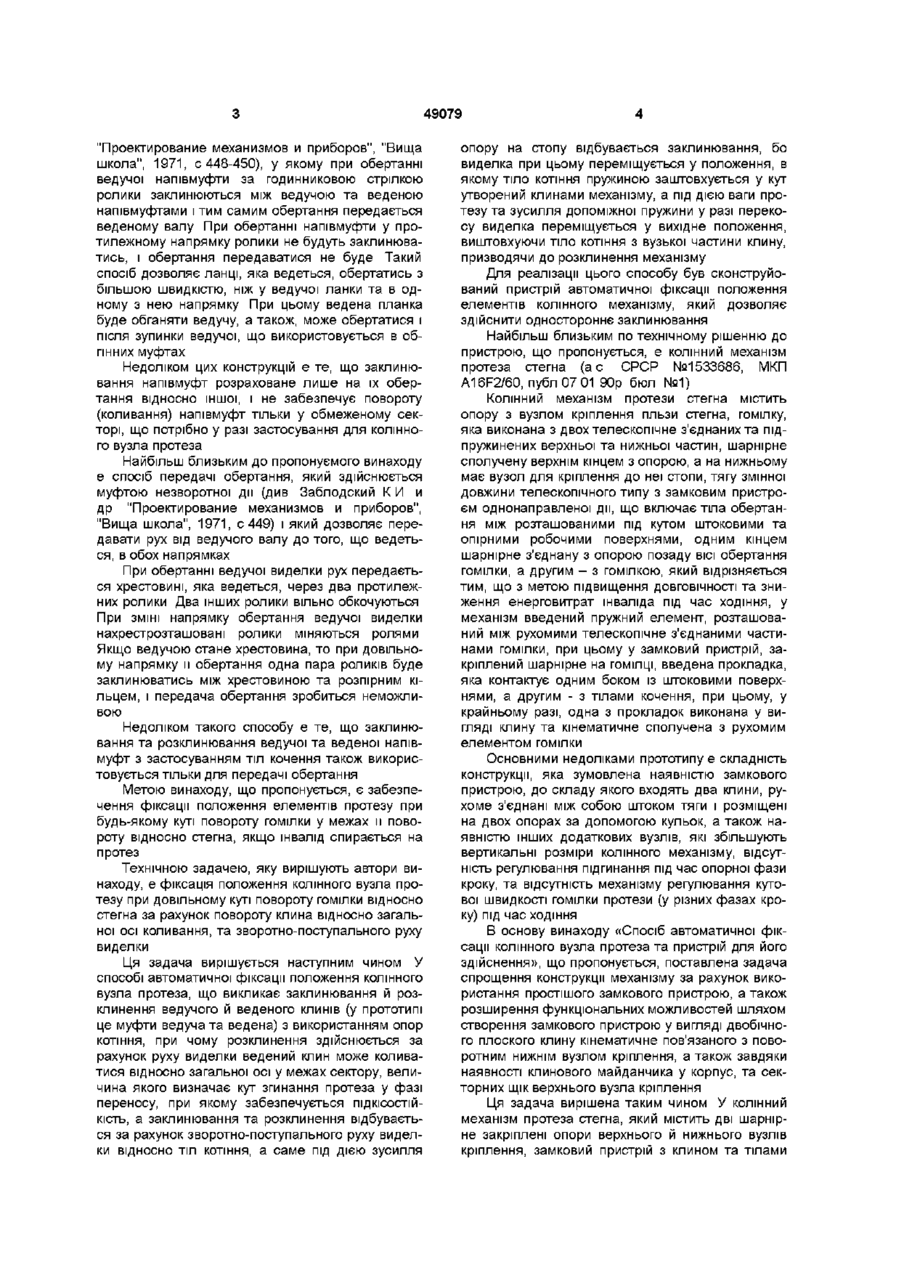
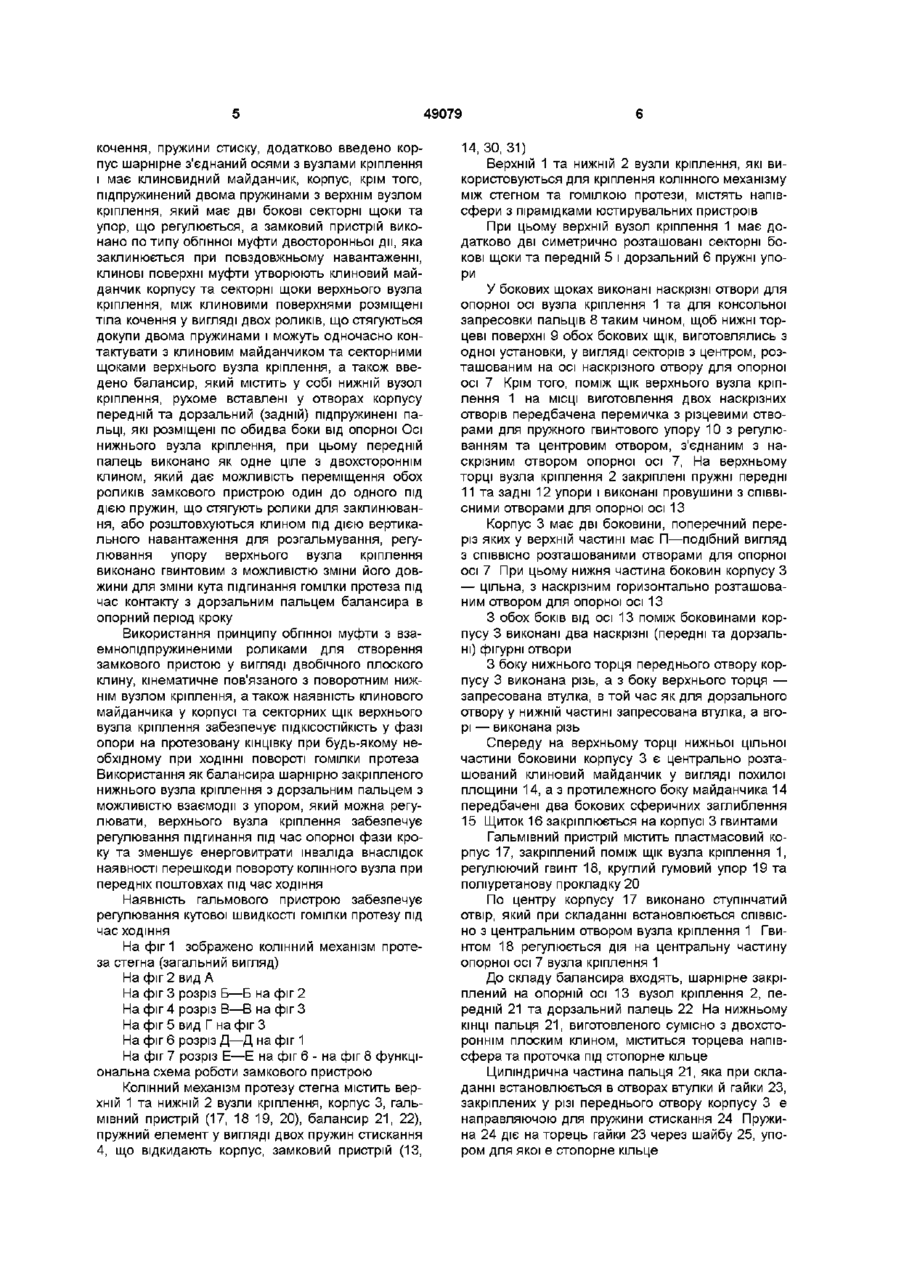
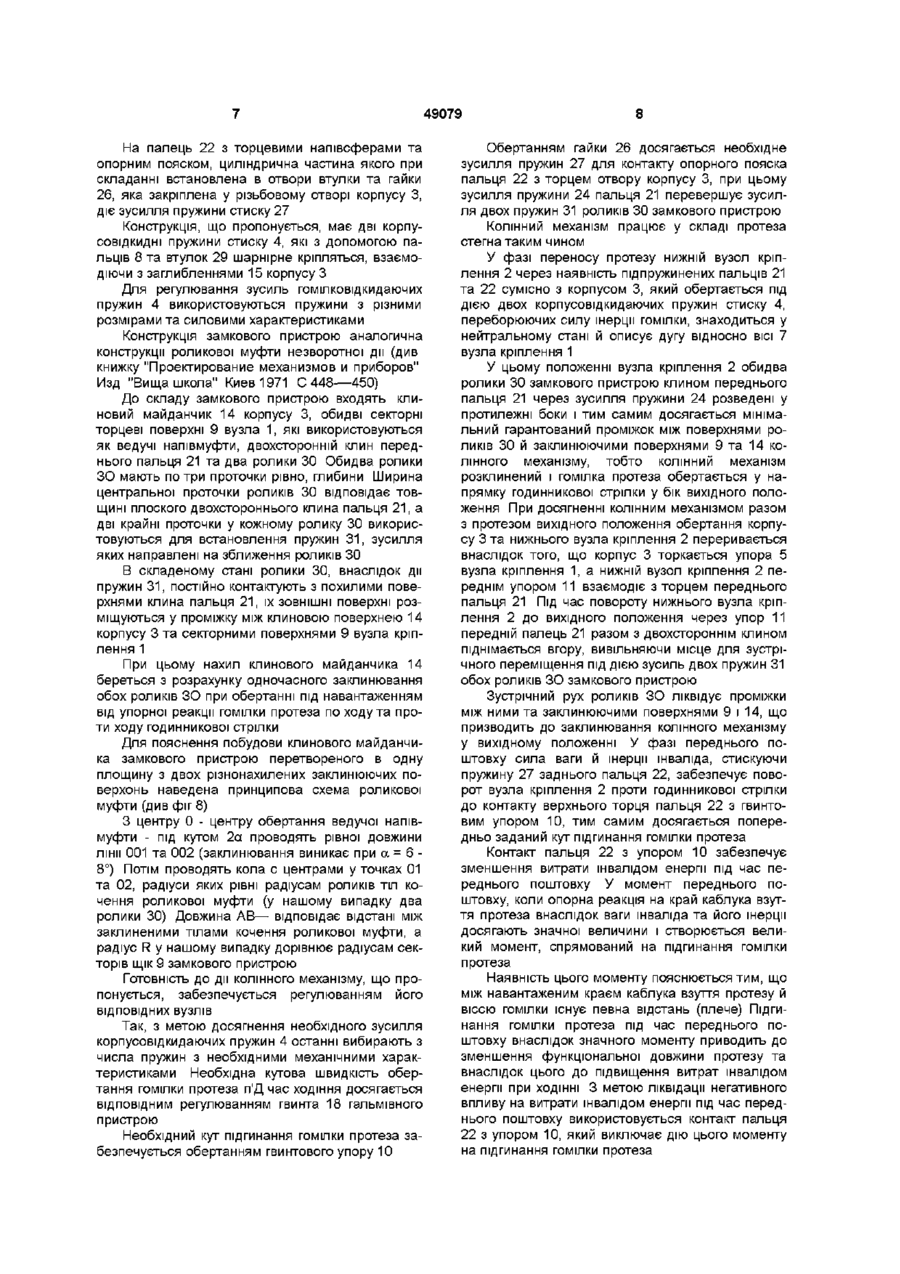
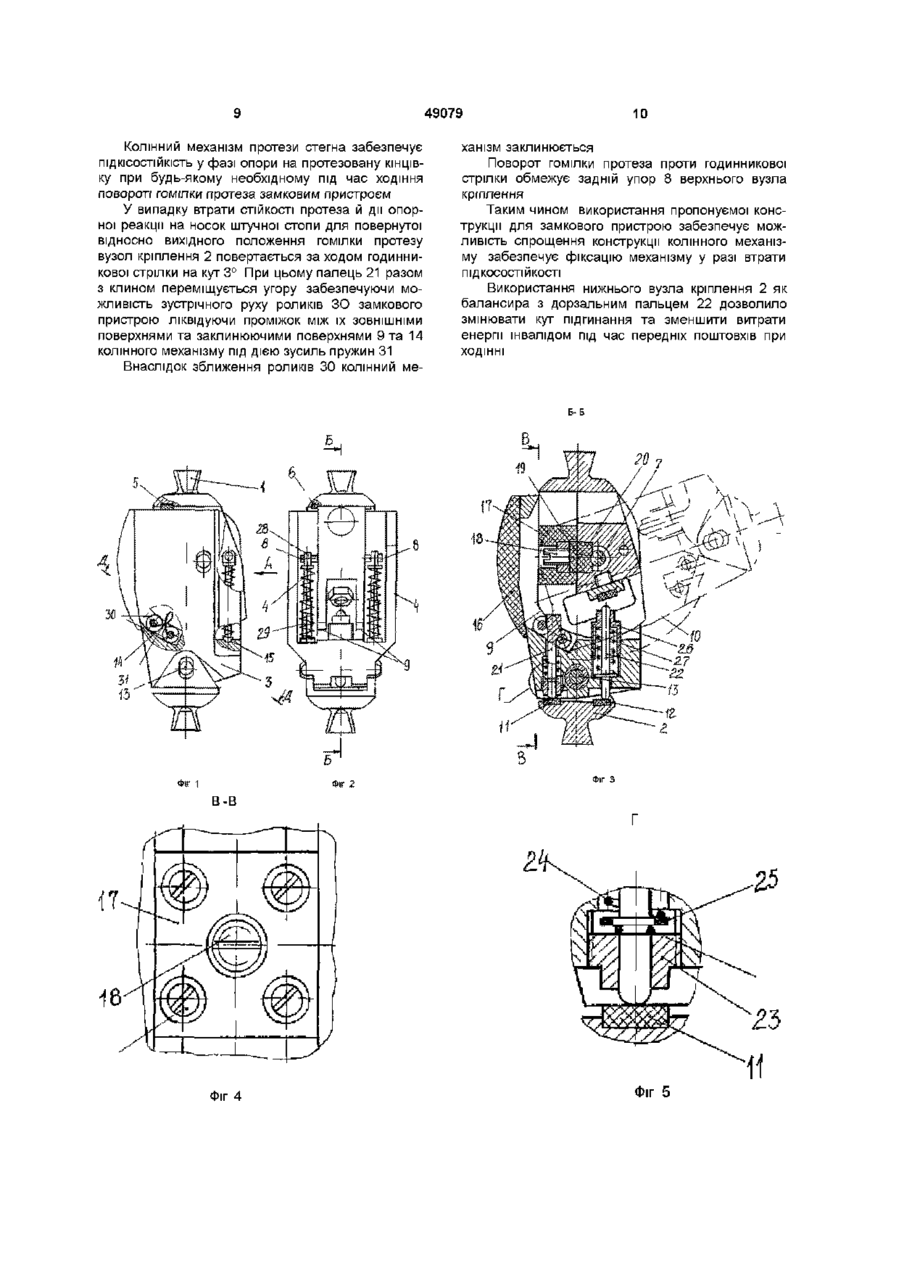
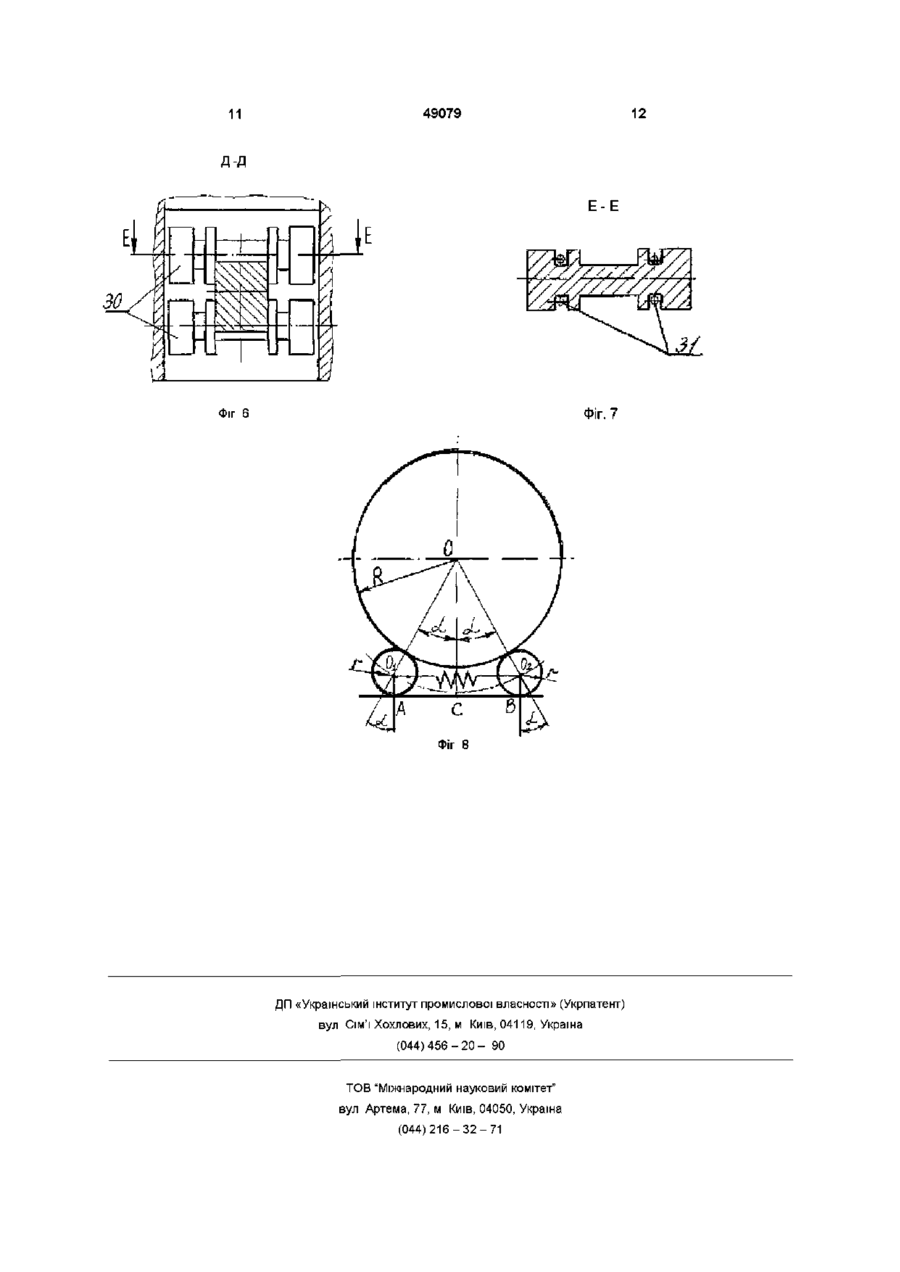
1 Спосіб автоматичної фіксації колінного вузла протеза, що включає заклинювання та розклинювання ведучого та веденого клинів, які сполучені з гомілкою та стегном ВІДПОВІДНО, З використанням опор котіння, при цьому керує заклинюванням-розклинюванням виделка, який відрізняється тим, що підкосостійкість забезпечується за рахунок заклинювання при будь-якому повороті веденого клина відносно ведучого клина на СПІЛЬНІЙ осі в межах сектора, величину якого визначає максимальний кут згинання протеза у фазі переносу, а заклинювання-розклинювання відбувається за рахунок дії зворотнопоступального руху виделки відносно тіл котіння, а саме під дією зусилля опору на стопу виделка переміщується у положення, в якому відбувається заклинювання, а під дією зусилля зворотної пружини та ваги гомілки у фазі переносу протеза виделка повертається у вихідне положення та відбувається розклинювання 2 Пристрій для автоматичної фіксації колінного вузла протеза, який містить дві шарнірно закріплені опори верхнього й нижнього вузлів кріплення, замковий пристрій з клином та тілами кочення, пружини стиску, який відрізняється тим, що в нього додатково введено корпус шарнірно з'єднаний осями з вузлами кріплення і має клиновий майданчик, корпус підпружинений двома пружинами з верхнім вузлом кріплення, який має дві бокові секторні щоки та упор, що регулюється, а замковий пристрій виконано по типу обгінної муфти двосторонньої дії, клинові поверхні муфти утворені клиновим майданчиком корпусу та секторними щоками верхнього вузла кріплення, між клиновими поверхнями розміщені тіла кочення у вигляді двох роликів, що стягуються двома пружинами і можуть одночасно контактувати з клиновим майданчиком та секторними щоками верхнього вузла кріплення, а також введено балансир, який містить у собі нижній вузол кріплення Винахід відноситься до медичної техніки, а точніше до протезування та протезобудування нижніх КІНЦІВОК У техніці ВІДОМІ способи, які дозволяють за клинювати та розклинювати механізми з використанням тіл котіння Наприклад, спосіб передачі обертання, який застосований у роликовій муфті вільного ходу (див книжку Заблодский К И , и др 3 Колінний механізм по п 2, який відрізняється тим, що у склад балансира додатково входять рухомо встановлені у отворах корпусу передній та дорзальний (задній) підпружинені пальці, які розміщені по обидва боки від опорної осі нижнього вузла кріплення, при цьому передній палець виконано як одне ціле з двостороннім клином, який має можливість переміщення обох роликів замкового пристрою одне до одного під дією пружин, що стягують ролики, для заклинювання або розштовхуються клином для розгальмовування, коли відсутнє вертикальне навантаження 4 Колінний механізм по п 2, який відрізняється тим, що регулювання упора верхнього вузла кріплення виконано гвинтовим з можливістю зміни його довжини для зміни кута підгинання гомілки протеза під час контакту з дорзальним пальцем балансира в опорний період кроку О о 49079 "Проектирование механизмов и приборов", "Вища школа", 1971, с 448-450), у якому при обертанні ведучої напівмуфти за годинниковою стрілкою ролики заклинюються між ведучою та веденою напівмуфтами і тим самим обертання передається веденому валу При обертанні напівмуфти у протилежному напрямку ролики не будуть заклинюватись, і обертання передаватися не буде Такий спосіб дозволяє ланці, яка ведеться, обертатись з більшою швидкістю, ніж у ведучої ланки та в одному з нею напрямку При цьому ведена планка буде обганяти ведучу, а також, може обертатися і після зупинки ведучої, що використовується в обгінних муфтах Недоліком цих конструкцій є те, що заклинювання напівмуфт розраховане лише на їх обертання відносно іншої, і не забезпечує повороту (коливання) напівмуфт тільки у обмеженому секторі, що потрібно у разі застосування для колінного вузла протеза Найбільш близьким до пропонуємого винаходу є спосіб передачі обертання, який здійснюється муфтою незворотної дм (див Заблодский К И и др "Проектирование механизмов и приборов", "Вища школа", 1971, с 449) і який дозволяє передавати рух від ведучого валу до того, що ведеться, в обох напрямках При обертанні ведучої виделки рух передається хрестовині, яка ведеться, через два протилежних ролики Два інших ролики вільно обкочуються При ЗМІНІ напрямку обертання ведучої виделки нахрестрозташовані ролики міняються ролями Якщо ведучою стане хрестовина, то при довільному напрямку и обертання одна пара роликів буде заклинюватись між хрестовиною та розпірним кільцем, і передача обертання зробиться неможливою Недоліком такого способу є те, що заклинювання та розклинювання ведучої та веденої напівмуфт з застосуванням тіл кочення також використовується тільки для передачі обертання Метою винаходу, що пропонується, є забезпечення фіксації положення елементів протезу при будь-якому куті повороту гомілки у межах и повороту відносно стегна, якщо інвалід спирається на протез Технічною задачею, яку вирішують автори винаходу, є фіксація положення колінного вузла протезу при довільному куті повороту гомілки відносно стегна за рахунок повороту клина відносно загальної осі коливання, та з во ротно-поступального руху виделки Ця задача вирішується наступним чином У способі автоматичної фіксації положення колінного вузла протеза, що викликає заклинювання й розклинення ведучого й веденого клинів (у прототипі це муфти ведуча та ведена) з використанням опор котіння, при чому розклинення здійснюється за рахунок руху виделки ведений кпин може коливатися відносно загальної осі у межах сектору, величина якого визначає кут згинання протеза у фазі переносу, при якому забезпечується ПІДКІСОСТІЙкість, а заклинювання та розклинення відбувається за рахунок зворотно-поступального руху виделки відносно тіл котіння, а саме під дією зусилля опору на стопу відбувається заклинювання, бо виделка при цьому переміщується у положення, в якому тіло котіння пружиною заштовхується у кут утворений клинами механізму, а під дією ваги протезу та зусилля допоміжної пружини у разі перекосу виделка переміщується у вихідне положення, виштовхуючи тіло котіння з вузької частини клину, призводячи до розклинення механізму Для реалізації цього способу був сконструйований пристрій автоматичної фіксації положення елементів колінного механізму, який дозволяє здійснити одностороннє заклинювання Найбільш близьким по технічному рішенню до пристрою, що пропонується, є колінний механізм протеза стегна (ас СРСР №1533686, МКП A16F2/60, публ07 01 90р бюл №1) Колінний механізм протези стегна містить опору з вузлом кріплення гільзи стегна, гомілку, яка виконана з двох телескопічне з'єднаних та підпружинених верхньої та нижньої частин, шарнірне сполучену верхнім кінцем з опорою, а на нижньому має вузол для кріплення до неї стопи, тягу змінної довжини телескопічного типу з замковим пристроєм однонаправленої дії, що включає тіла обертання між розташованими під кутом штоковими та опірними робочими поверхнями, одним кінцем шарнірне з'єднану з опорою позаду ВІСІ обертання гомілки, а другим - з гомілкою, який відрізняється тим, що з метою підвищення ДОВГОВІЧНОСТІ та зниження енерговитрат інваліда під час ходіння, у механізм введений пружний елемент, розташований між рухомими телескопічне з'єднаними частинами гомілки, при цьому у замковий пристрій, закріплений шарнірне на ГОМІЛЦІ, введена прокладка, яка контактує одним боком із штоковими поверхнями, а другим - з тілами кочення, при цьому, у крайньому разі, одна з прокладок виконана у вигляді клину та кінематичне сполучена з рухомим елементом гомілки Основними недоліками прототипу є складність конструкції, яка зумовлена наявністю замкового пристрою, до складу якого входять два кпини, рухоме з'єднані між собою штоком тяги і розміщені на двох опорах за допомогою кульок, а також наявністю інших додаткових вузлів, які збільшують вертикальні розміри колінного механізму, відсутність регулювання підгинання під час опорної фази кроку, та відсутність механізму регулювання кутової швидкості гомілки протези (у різних фазах кроку) під час ходіння В основу винаходу «Спосіб автоматичної фіксації колінного вузла протеза та пристрій для його здійснення», що пропонується, поставлена задача спрощення конструкції механізму за рахунок використання простішого замкового пристрою, а також розширення функціональних можливостей шляхом створення замкового пристрою у вигляді двобічного плоского клину кінематичне пов'язаного з поворотним нижнім вузлом кріплення, а також завдяки наявності клинового майданчика у корпус, та секторних щік верхнього вузла кріплення Ця задача вирішена таким чином У колінний механізм протеза стегна, який містить дві шарнірне закріплені опори верхнього й нижнього вузлів кріплення, замковий пристрій з клином та тілами 49079 кочення, пружини стиску, додатково введено корпус шарнірне з'єднаний осями з вузлами кріплення і має клиновидний майданчик, корпус, крім того, підпружинений двома пружинами з верхнім вузлом кріплення, який має дві бокові секторні щоки та упор, що регулюється, а замковий пристрій виконано по типу обгінної муфти двосторонньої дії, яка заклинюється при повздовжньому навантаженні, клинові поверхні муфти утворюють клиновий майданчик корпусу та секторні щоки верхнього вузла кріплення, між клиновими поверхнями розміщені тіла кочення у вигляді двох роликів, що стягуються докупи двома пружинами і можуть одночасно контактувати з клиновим майданчиком та секторними щоками верхнього вузла кріплення, а також введено балансир, який містить у собі нижній вузол кріплення, рухоме вставлені у отворах корпусу передній та дорзальний (задній) підпружинені пальці, які розміщені по обидва боки від опорної Осі нижнього вузла кріплення, при цьому передній палець виконано як одне ціле з двохстороннім клином, який дає можливість переміщення обох роликів замкового пристрою один до одного під дією пружин, що стягують ролики для заклинювання, або розштовхуються клином під дією вертикального навантаження для розгальмування, регулювання упору верхнього вузла кріплення виконано гвинтовим з можливістю зміни його довжини для зміни кута підгинання гомілки протеза під час контакту з дорзальним пальцем балансира в опорний період кроку Використання принципу обгінної муфти з взаемнопід пружиненими роликами для створення замкового пристою у вигляді двобічного плоского клину, кінематичне пов'язаного з поворотним нижнім вузлом кріплення, а також наявність клинового майданчика у корпусі та секторних щік верхнього вузла кріплення забезпечує ПІДКІСОСТІЙКІСТЬ у фазі опори на протезовану кінцівку при будь-якому необхідному при ХОДІННІ повороті гомілки протеза Використання як балансира шарнірно закріпленого нижнього вузла кріплення з дорзальним пальцем з можливістю взаємодії з упором, який можна регулювати, верхнього вузла кріплення забезпечує регулювання підгинання під час опорної фази кроку та зменшує енерговитрати інваліда внаслідок наявності перешкоди повороту колінного вузла при передніх поштовхах під час ходіння Наявність гальмового пристрою забезпечує регулювання кутової швидкості гомілки протезу під час ходіння На фіг 1 зображено колінний механізм протеза стегна (загальний вигляд) На фіг 2 вид А На фіг 3 розріз Б—Б на фіг 2 На фіг 4 розріз В—В на фіг З На фіг 5 вид Г на фіг З На фіг 6 розріз Д—Д на фіг 1 На фіг 7 розріз Е—Е на фіг 6 - на фіг 8 функціональна схема роботи замкового пристрою Колінний механізм протезу стегна містить верхній 1 та нижній 2 вузли кріплення, корпус 3, гальмівний пристрій (17, 18 19, 20), балансир 21, 22), пружний елемент у вигляді двох пружин стискання 4, що відкидають корпус, замковий пристрій (13, 14, ЗО, 31) Верхній 1 та нижній 2 вузли кріплення, які використовуються для кріплення колінного механізму між стегном та гомілкою протези, містять напівсфери з пірамідками юстирувальних пристроїв При цьому верхній вузол кріплення 1 має додатково дві симетрично розташовані секторні бокові щоки та передній 5 і дорзальний 6 пружні упори У бокових щоках виконані наскрізні отвори для опорної осі вузла кріплення 1 та для консольної запресовки пальців 8 таким чином, щоб нижні торцеві поверхні 9 обох бокових щік, виготовлялись з одної установки, у вигляді секторів з центром, розташованим на осі наскрізного отвору для опорної осі 7 Крім того, поміж щік верхнього вузла кріплення 1 на МІСЦІ виготовлення двох наскрізних отворів передбачена перемичка з різцевими отворами для пружного гвинтового упору 10 з регулюванням та центровим отвором, з'єднаним з наскрізним отвором опорної осі 7, На верхньому торці вузла кріплення 2 закріплені пружні передні 11 та задні 12 упори і виконані провушини з СПІВВІсними отворами для опорної осі 13 Корпус 3 має дві боковини, поперечний переріз яких у верхній частині має П—подібний вигляд з СПІВВІСНО розташованими отворами для опорної осі 7 При цьому нижня частина боковин корпусу З — цільна, з наскрізним горизонтально розташованим отвором для опорної осі 13 З обох боків від осі 13 поміж боковинами корпусу 3 виконані два наскрізні (передні та дорзальні) фігурні отвори З боку нижнього торця переднього отвору корпусу 3 виконана різь, а з боку верхнього торця — запресована втулка, в той час як для дорзального отвору у нижній частині запресована втулка, а вгорі — виконана різь Спереду на верхньому торці нижньої цільної частини боковини корпусу 3 є центрально розташований клиновий майданчик у вигляді похилої площини 14, а з протилежного боку майданчика 14 передбачені два бокових сферичних заглиблення 15 Щиток 16 закріплюється на корпусі 3 гвинтами Гальмівний пристрій містить пластмасовий корпус 17, закріплений поміж щік вузла кріплення 1, регулюючий гвинт 18, круглий гумовий упор 19 та поліуретанову прокладку 20 По центру корпусу 17 виконано ступінчатий отвір, який при складанні встановлюється СПІВВІСно з центральним отвором вузла кріплення 1 Гвинтом 18 регулюється дія на центральну частину опорної осі 7 вузла кріплення 1 До складу балансира входять, шарнірне закріплений на опорній осі 13 вузол кріплення 2, передній 21 та дорзальний палець 22 На нижньому КІНЦІ пальця 21, виготовленого сумісно з двохстороннім плоским клином, міститься торцева напівсферата проточка під стопорне кільце Циліндрична частина пальця 21, яка при складанні встановлюється в отворах втулки й гайки 23, закріплених у різі переднього отвору корпусу 3 є направляючою для пружини стискання 24 Пружина 24 діє на торець гайки 23 через шайбу 25, упором для якої є стопорне кільце 49079 На палець 22 з торцевими напівсферами та опорним пояском, циліндрична частина якого при складанні встановлена в отвори втулки та гайки 26, яка закріплена у різьбовому отворі корпусу З, діє зусилля пружини стиску 27 Конструкція, що пропонується, має дві корпуСОВІДКИДНІ пружини стиску 4, які з допомогою пальців 8 та втулок 29 шарнірне кріпляться, взаємодіючи з заглибленнями 15 корпусу З Для регулювання зусиль гомілковідкидаючих пружин 4 використовуються пружини з різними розмірами та силовими характеристиками Конструкція замкового пристрою аналогична конструкції роликової муфти незворотної дії (див книжку "Проектирование механизмов и приборов" Изд "Вища школа" Киев 1971 С 448—450) До складу замкового пристрою входять клиновий майданчик 14 корпусу 3, обидві секторні торцеві поверхні 9 вузла 1, які використовуються як ведучі напівмуфти, двохсторонній клин переднього пальця 21 та два ролики ЗО Обидва ролики ЗО мають потри проточки рівно, глибини Ширина центральної проточки роликів ЗО відповідає товщині плоского двохстороннього клина пальця 21, а дві крайні проточки у кожному ролику ЗО використовуються для встановлення пружин 31, зусилля яких направлені на зближення роликів ЗО В складеному стані ролики ЗО, внаслідок дії пружин 31, постійно контактують з похилими поверхнями клина пальця 21, їх ЗОВНІШНІ поверхні розміщуються у проміжку між клиновою поверхнею 14 корпусу 3 та секторними поверхнями 9 вузла кріплення 1 При цьому нахил клинового майданчика 14 береться з розрахунку одночасного заклинювання обох роликів ЗО при обертанні під навантаженням від упорної реакції гомілки протеза по ходу та проти ходу годинникової стрілки Для пояснення побудови клинового майданчика замкового пристрою перетвореного в одну площину з двох різнонахилених заклинюючих поверхонь наведена принципова схема роликової муфти (див фіг 8) З центру 0 - центру обертання ведучої напівмуфти - під кутом 2а проводять рівної довжини лінії 001 та 002 (заклинювання виникає при а = 6 8°) Потім проводять кола с центрами у точках 01 та 02, радіуси яких рівні радіусам роликів тіл кочення роликової муфти (у нашому випадку два ролики ЗО) Довжина АВ— відповідає відстані між заклиненими тілами кочення роликової муфти, а радіус R у нашому випадку дорівнює радіусам секторів щік 9 замкового пристрою Готовність ДО ДІЇ КОЛІННОГО механізму, що пропонується, забезпечується регулюванням його ВІДПОВІДНИХ вузлів Так, з метою досягнення необхідного зусилля корпусовідкидаючих пружин 4 останні вибирають з числа пружин з необхідними механічними характеристиками Необхідна кутова швидкість обертання гомілки протеза п'Д час ходіння досягається ВІДПОВІДНИМ регулюванням гвинта 18 гальмівного пристрою Необхідний кут підгинання гомілки протеза забезпечується обертанням гвинтового упору 10 8 Обертанням гайки 26 досягається необхідне зусилля пружин 27 для контакту опорного пояска пальця 22 з торцем отвору корпусу 3, при цьому зусилля пружини 24 пальця 21 перевершує зусилля двох пружин 31 роликів ЗО замкового пристрою Колінний механізм працює у складі протеза стегна таким чином У фазі переносу протезу нижній вузол кріплення 2 через наявність підпружинених пальців 21 та 22 сумісно з корпусом 3, який обертається під дією двох корпусовідкидаючих пружин стиску 4, переборюючих силу інерції гомілки, знаходиться у нейтральному стані й описує дугу відносно ВІСІ 7 вузла кріплення 1 У цьому положенні вузла кріплення 2 обидва ролики ЗО замкового пристрою клином переднього пальця 21 через зусилля пружини 24 розведені у протилежні боки і тим самим досягається мінімальний гарантований проміжок між поверхнями роликів ЗО й заклинюючими поверхнями 9 та 14 колінного механізму, тобто колінний механізм розклинений і гомілка протеза обертається у напрямку годинникової стрілки у бік вихідного положення При досягненні колінним механізмом разом з протезом вихідного положення обертання корпусу 3 та нижнього вузла кріплення 2 переривається внаслідок того, що корпус 3 торкається упора 5 вузла кріплення 1, а нижній вузол кріплення 2 переднім упором 11 взаємодіє з торцем переднього пальця 21 Під час повороту нижнього вузла кріплення 2 до вихідного положення через упор 11 передній палець 21 разом з двохстороннім клином піднімається вгору, вивільняючи місце для зустрічного переміщення під дією зусиль двох пружин 31 обох роликів ЗО замкового пристрою Зустрічний рух роликів ЗО ліквідує проміжки між ними та заклинюючими поверхнями 9 і 14, що призводить до заклинювання колінного механізму у вихідному положенні У фазі переднього поштовху сила ваги й інерції інваліда, стискуючи пружину 27 заднього пальця 22, забезпечує поворот вузла кріплення 2 проти годинникової стрілки до контакту верхнього торця пальця 22 з гвинтовим упором 10, тим самим досягається попередньо заданий кут підгинання гомілки протеза Контакт пальця 22 з упором 10 забезпечує зменшення витрати інвалідом енергії під час переднього поштовху У момент переднього поштовху, коли опорна реакція на край каблука взуття протеза внаслідок ваги інваліда та його інерції досягають значної величини і створюється великий момент, спрямований на підгинання гомілки протеза Наявність цього моменту пояснюється тим, що між навантаженим краєм каблука взуття протезу й віссю гомілки існує певна відстань (плече) Підгинання гомілки протеза під час переднього поштовху внаслідок значного моменту приводить до зменшення функціональної довжини протезу та внаслідок цього до підвищення витрат інвалідом енергії при ХОДІННІ 3 метою ліквідації негативного впливу на витрати інвалідом енергії під час переднього поштовху використовується контакт пальця 22 з упором 10, який виключає дію цього моменту на підгинання гомілки протеза 49079 Колінний механізм протези стегна забезпечує ПІДКІСОСТІЙКІСТЬ у фазі опори на протезовану кінцівку при будь-якому необхідному під час ходіння повороті гомілки протеза замковим пристроєм У випадку втрати СТІЙКОСТІ протеза й дії опорної реакції на носок штучної стопи для повернутої відносно вихідного положення гомілки протезу вузол кріплення 2 повертається за ходом годинникової стрілки на кут 3° При цьому палець 21 разом з клином переміщується угору забезпечуючи можливість зустрічного руху роликів ЗО замкового пристрою ліквідуючи проміжок між їх ЗОВНІШНІМИ поверхнями та заклинюючими поверхнями 9 та 14 колінного механізму під дією зусиль пружин 31 Внаслідок зближення роликів ЗО колінний ме 10 ханізм заклинюється Поворот гомілки протеза проти годинникової стрілки обмежує задній упор 8 верхнього вузла кріплення Таким чином використання пропонуємої конструкції для замкового пристрою забезпечує можливість спрощення конструкції колінного механізму забезпечує фіксацію механізму у разі втрати ПІДКОСОСТІЙКОСТІ Використання нижнього вузла кріплення 2 як балансира з дорзальним пальцем 22 дозволило змінювати кут підгинання та зменшити витрати енергії інвалідом під час передніх поштовхів при ХОДІННІ Б-Б ФІГ Фіг 2 1 В-В Фіг 4 Фіг 5 11 12 49079 Д-Д Е-Е Фіг. 7 Фіг б Фіг 8 ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна ( 0 4 4 ) 4 5 6 - 2 0 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for automatic fixation of knee-joint prosthetic unit and device enabling such a fixation
Автори англійськоюKrasiuk Heorhii Vasyliovych, Semenets Valerii Vasyliovych, Nevliudov Ihor Shakirovych, Dziundziuk Borys Vasyliovych, Molchanov Volodymyr Volodymyrovych, Bublii Valentyn Volodymyrovych, Palahin Viktor Andriiovych, Horlievskyi Stanislav Eduardovych
Назва патенту російськоюСпособ автоматической фиксации коленного узла протеза и устройство для его осуществления
Автори російськоюКрасюк Георгий Василиевич, Семенец Валерий Васильевич, Невлюдов Игорь Шакирович, Дзюндзюк Борис Васильевич, Молчанов Владимир Владимирович, Бублий Валентин Владимирович, Палагин Виктор Андреевич, Горлевский Станислав Эдуардович
МПК / Мітки
МПК: A61F 2/64
Мітки: спосіб, протеза, колінного, автоматичної, вузла, здійснення, пристрій, фіксації
Код посилання
<a href="https://ua.patents.su/6-49079-sposib-avtomatichno-fiksaci-kolinnogo-vuzla-proteza-ta-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб автоматичної фіксації колінного вузла протеза та пристрій для його здійснення</a>
Пристрій для фіксації протеза
Номер патенту: 44642
Опубліковано: 15.02.2002
Автори: Ісаєнко Олександр Леонідович, Шевчук Віктор Іванович, Безсмертний Юрій Олексійович
МПК: A61F 2/00
Мітки: пристрій, протеза, фіксації
Формула / Реферат:
1. Пристрій для фіксації протеза, що включає каркас з приймальною гільзою під куксу гомілки, надколінoк і ремені з отворами, який відрізняється тим, що надколінок виконано напівсферичної форми з еластичного матеріалу суцільним, верхня його частина звужена, створює ремінь, поперек якого розташоване кільце гуми.2. Пристрій по п. 1, який відрізняється тим, що між надколінком і ременем створено звужений перешийок, вище якого ремінь...
Спосіб виготовлення протеза серцевого клапана та пристрій для його здійснення
Номер патенту: 27373
Опубліковано: 15.09.2000
Автори: Чіхон Ромуальд, Стоцек Іоланта, Реліга Збігнев, Кржисков Марек, Столарцевич Богдан
МПК: A61F 2/24
Мітки: серцевого, здійснення, спосіб, протеза, виготовлення, пристрій, клапана
Текст:
...выворачивать наружу прежде, чем она будет протягиваться в опору 1. Образованную та ким образом втулку протягивают через кольцевой элемент 1, как показано на фиг. 4. В результате чего втулка располагается соосно с кольцевым элементом, а осевые концы текстильного покрытия выступают сверху и снизу кольцевого элемента (опоры). На фиг. 3 показана часть втулки, кото рая, чтобы иметь возможность выступать сверху и снизу опоры 1, должна...
Спосіб фіксації незнімних адгезивних конструкцій ортопедичних апaратів і пристрій для його здійснення
Номер патенту: 14598
Опубліковано: 20.01.1997
Автори: Оспанова Гульсара Бікєєвна, Заблоцький Ярослав Володимирович, Драгомирецька Мирослава Степанівна
МПК: A61C 13/00
Мітки: пристрій, адгезивних, ортопедичних, фіксації, апаратів, конструкцій, здійснення, спосіб, незнімних
Формула / Реферат:
1. Способ фіксації незнімних адгезивних конструкцій ортопедичних апаратів, який полягає в тому, що вибирають місце фіксації на поверхні зуба, протравлюють поверхню емалі, накладають фіксуючий матеріал та закріплюють апарат, який відрізняється тим,'що на поверхню зуба перед протравленням накладають ізоляційну стрічку.2. Пристрій для здійснення способу фіксації незнімних адгезивних конструкцій ортопедичних апаратів, що містить...
Пристрій для герметизації простору під базисом повного знімного зубного протеза і спосіб його реалізації
Номер патенту: 43743
Опубліковано: 17.12.2001
Автори: Чулак Леонід Дмитрович, Шахновський Ігор Васильович
МПК: A61C 13/25
Мітки: реалізації, базисом, герметизації, протеза, зубного, повного, простору, знімного, спосіб, пристрій
Формула / Реферат:
1. Пристрій для герметизації простору під базисом повного знімного зубного протеза, складений з відвідної трубки, герметично вмонтованої в отвір в піднебінній частині базису і з'єднаної з манометром, який відрізняється тим, що відвідна трубка, виконана з прозорого термопластичного матеріалу, проходить крізь фронтальну ділянку штучного зубного ряду і має на позаротовому кінці два отвори, на одному з яких встановлено регулюючий вентиль з...
Спосіб фіксації інформаційних спектрів та пристрій для його здійснення
Номер патенту: 10865
Опубліковано: 25.12.1996
Автори: Кривошеєв Валерій Миколайович, Купченко Еріст Васильович
МПК: A61H 39/00
Мітки: пристрій, спектрів, спосіб, здійснення, фіксації, інформаційних
Формула / Реферат:
1. Способ фиксации информационных спектров, включающий перенос волновых характеристик от источника информации к носителю информации, отличающийся тем, что в качестве носителя информации используют предварительно очищенное от информации программируемое постоянное запоминающее устройство, а фиксацию производят во время подачи записывающего сигнала, причем адрес поступления информации в ячейку программируемого постоянного запоминающего...
Попередній патент: Композиція чорнильної пасти для кулькових ручок
Наступний патент: Фільтруюча центрифуга
Випадковий патент: Підвіска коліс системи автомобіля