Спосіб динамічного навантаження двигуна постійного струму незалежного збудження та пристрій для його здійснення
Номер патенту: 40067
Опубліковано: 16.07.2001
Автори: Величко Тетяна Володимирівна, Вошун Олексій Миколайович, Бялобржевський Олексій Володимирович, Добрецов Володимир Валентинович, Пасмурских Олександр Олексійович, Луговий Анатолій Васильович, Родькін Дмитро Йосипович
Формула / Реферат
1. Спосіб динамічного навантаження двигуна постійного струму незалежного збудження, який полягає в тому, що якір двигуна живиться від регульованого джерела через датчик струму якоря, обмотка збудження живиться від регульованого джерела через датчик струму збудження, контролюються параметри режиму навантаження, струм якоря, напруга якоря, швидкість обертання якоря, який відрізняється тим, що задають залежності струму якоря та кутової швидкості якоря, визначають залежності для напруг на якорі і обмотки збудження, на виході системи управління одержують значення напруг живлення якоря і обмотки збудження, контролюють параметри навантажувального режиму і рівень шуму щітково-колекторного апарата, а також диференціали струму і швидкості за часом, змінюють кут зрушення фаз між змінними складовими струму якоря та кутової швидкості з певним інтервалом, навантаження повторюють, за одержаними даними роблять висновок про експлуатаційну придатність випробувальної електричної машини.
2. Пристрій, який реалізує спосіб, що включає перетворювач напруги, з'єднаний через датчик струму з якорним ланцюгом машини, напруга на якому контролюється датчиком, збудник, що управляється по напрузі, з'єднаний через датчик струму збудження з обмоткою збудження машини, напруга на якій знімається з датчика напруги, регулятор струму, другий вхід якого з'єднаний з датчиком, регулятор струму збудження другим входом з'єднаним з датчиком струму збудження, який відрізняється тим, що пристрій додатково постачений датчиком контролю іскріння колектора, датчиком швидкості, релейним елементом та керуючою ЕОМ, причому шостий вихід ЕОМ з'єднаний з першим входом регулятора струму, сьомий вихід - з першим входом регулятора струму збудження, напруга з датчиків надходить: на вхід три - напруга якоря, на вхід чотири - напруга шуму, на вхід п'ять - струм якоря, на вхід дев'ять - швидкість обертання, на вхід десять - струм збудження, на вхід одинадцять - напруга збудження, по другому входу здійснюється завдання основних електричних і механічних параметрів, по першому входу задаються параметри, що формують режими навантаження.
Текст
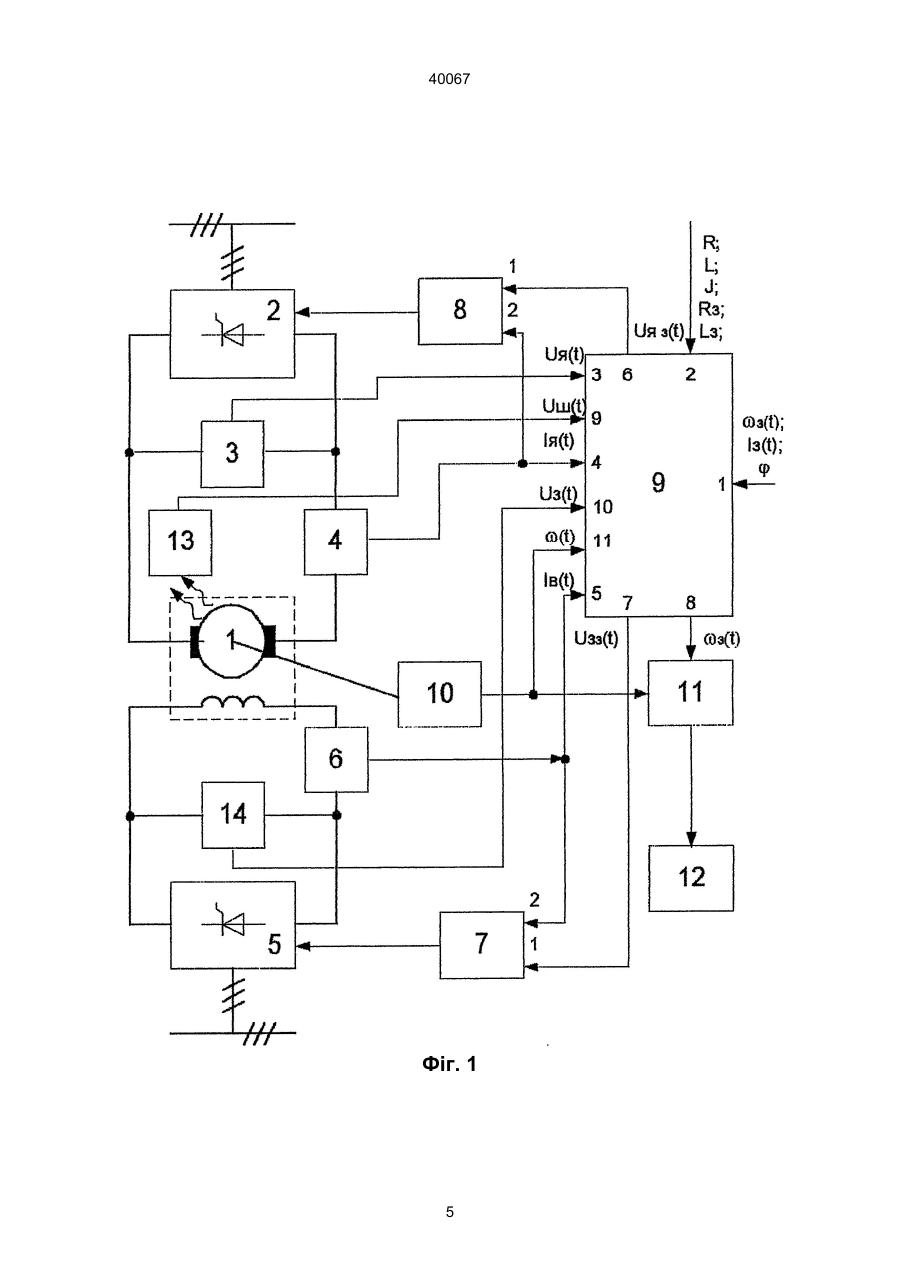
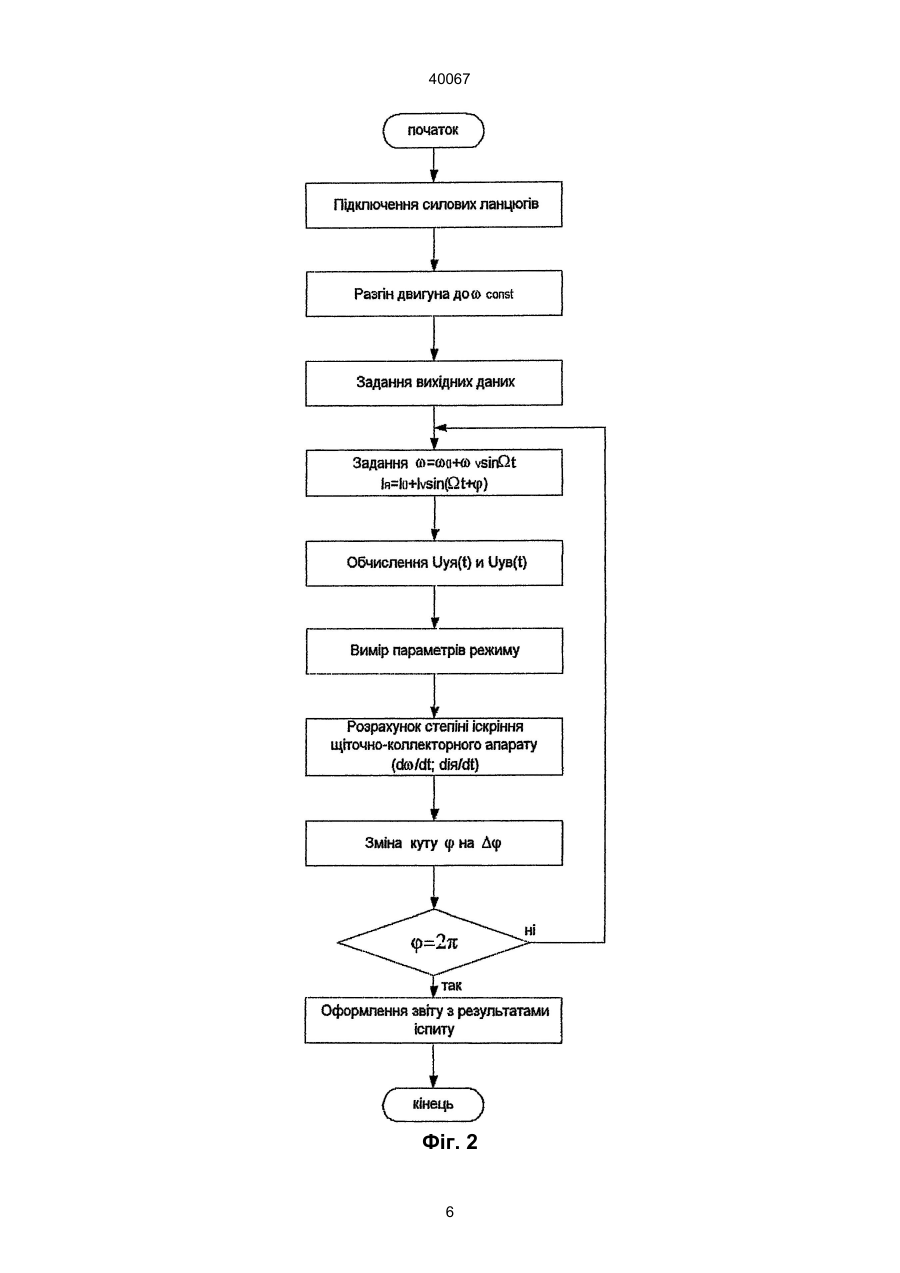
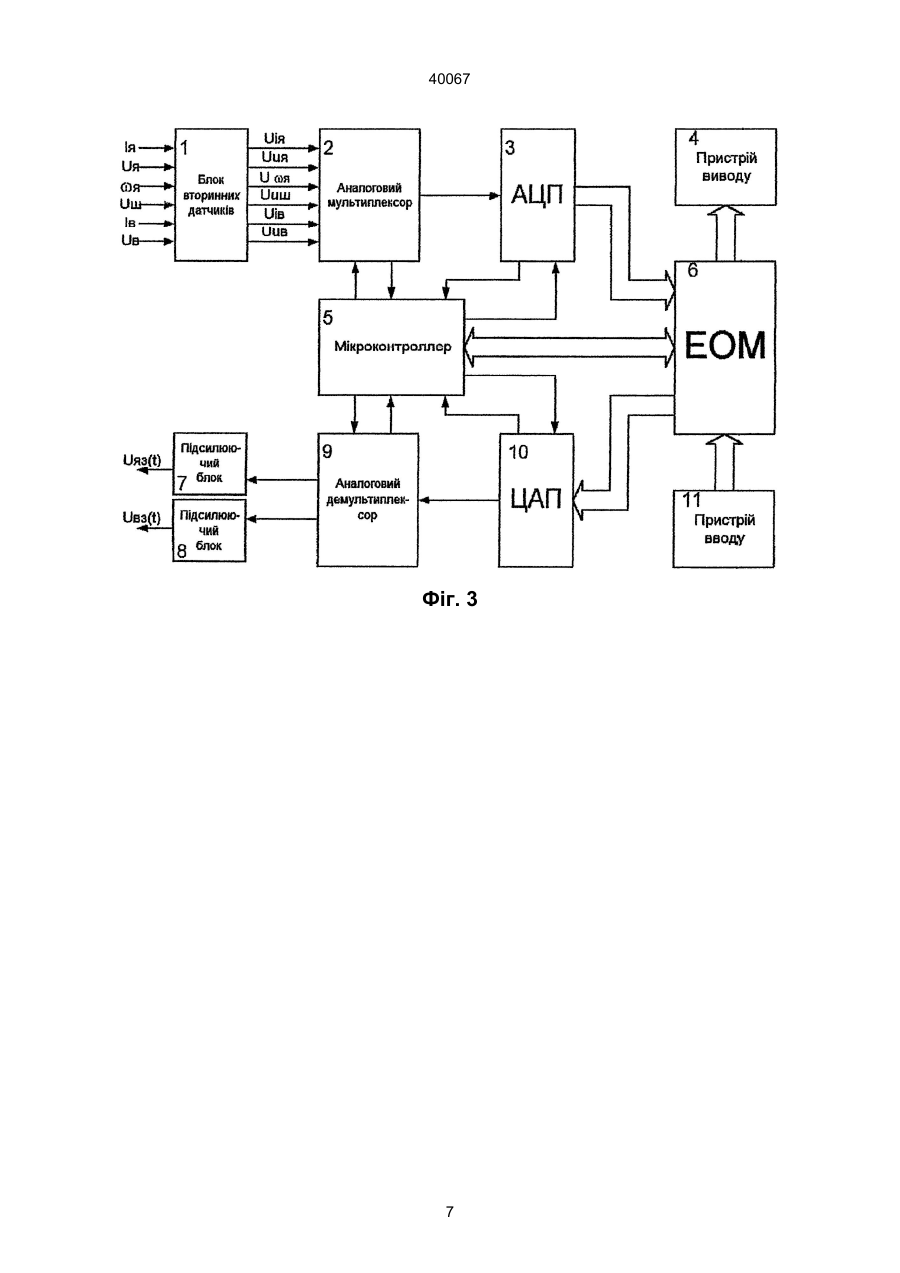
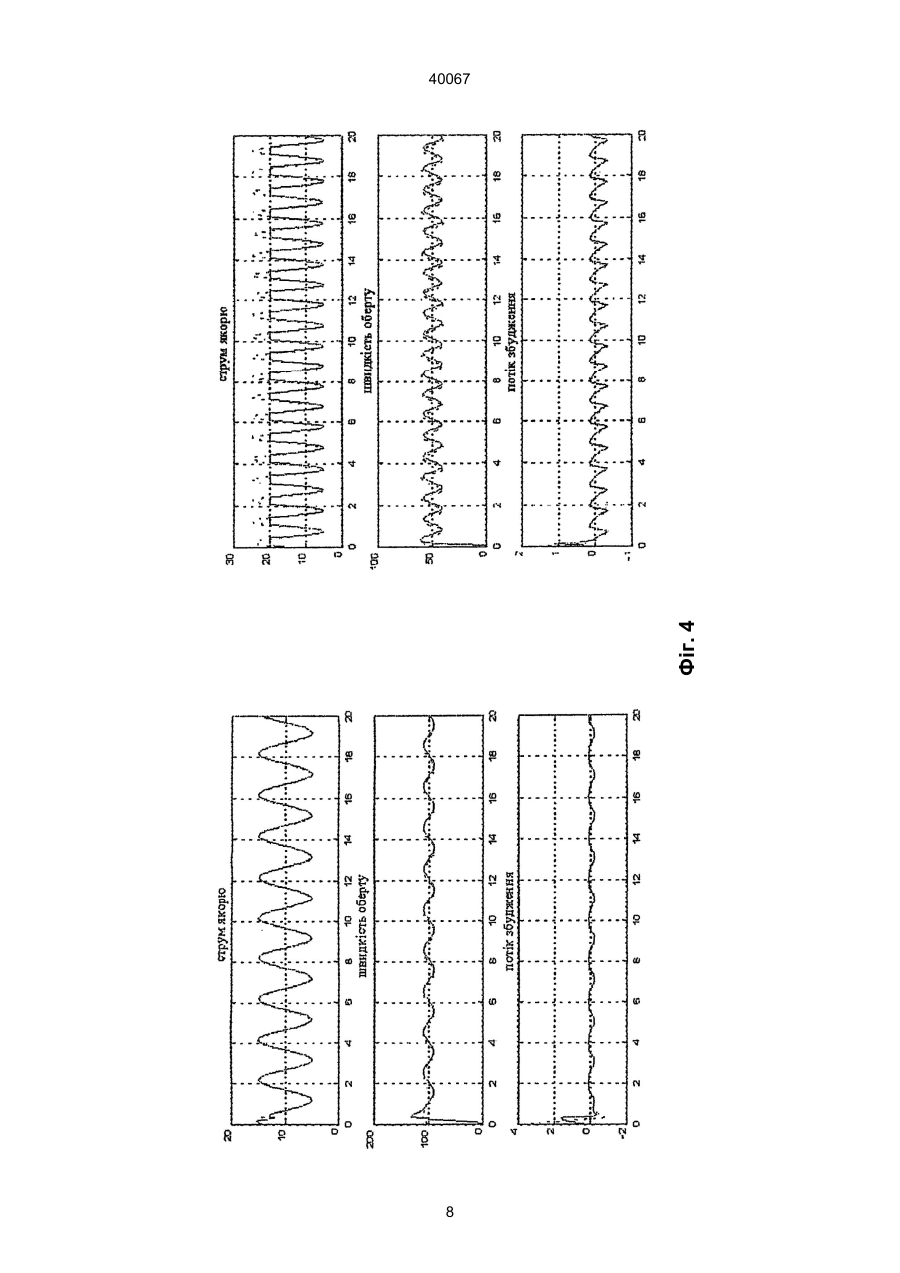
1. Спосіб динамічного навантаження двигуна постійного струму незалежного збудження, який полягає в тому, що якір двигуна живиться від регульованого джерела через датчик струму якоря, обмотка збудження живиться від регульованого джерела через датчик струму збудження, контролюються параметри режиму навантаження, струм якоря, напруга якоря, швидкість обертання якоря, який відрізняється тим, що задають залежності струму якоря та кутової швидкості якоря, визначають залежності для напруг на якорі і обмотки збудження, на виході системи управління одержують значення напруг живлення якоря і обмотки збудження, контролюють параметри навантажувального режиму і рівень шуму щітково-колекторного апарата, а також диференціали струму і швидкості за часом, змінюють кут зрушення фаз між змінни A (54) СПОСІБ ДИНАМІЧНОГО НАВАНТАЖЕННЯ ДВИГУНА ПОСТІЙНОГО СТРУМУ НЕЗАЛЕЖНОГО ЗБУДЖЕННЯ ТА ПРИСТРІЙ ДЛЯ ЙОГО ЗДІЙСНЕННЯ 40067 U 3 (t ) I 0 R 3 + 2 DI¢3 × W × L З = > 1,0 , U 30 I¢ R 3 0 заданого струмного навантаження) можна поліпшити шляхом збільшення моменту інерції (на вал двигуна необхідно встановити маховик). Це, безумовно, ускладнює конструкцію та самий процес, тому як на кожний двигун потрібен свій маховик, операція його установки трудомістка та тривала за часом. Крім того, динамічні параметри навантаження за швидкістю dw/dt жорстко прив'язані за часом до динамічного параметру за струмом di/dt. Досвід показує, що іскріння колектора відбувається при певному поєднанні згаданих характеристик. Недоліком способу, що аналізується, таким чином, є обмежені границі зміни навантаження та недостатня якість одержуваних характеристик. Відомий спосіб навантаження, в якому завдання параметрів режиму навантаження здійснюється при постійній величині напруги на якорі і потоці двигуна, що змінюється за періодичним законом [Авторське свідоцтво СРСР № 1563410. Спосіб навантаження двигунів постійного струму та пристрій для його здійснення G01R31/34]. Відомий спосіб здійснюється шляхом підключення двигуна до джерела нерегульованої напруги збоку якоря. За допомогою регульованого джерела живлення ланцюга збудження задається гармонічна складова струму збудження та, як слід, ЕДС двигуна. Під дією змінної складової ЕДС заданої частоти в ланцюзі якоря буде знакозмінний струм, який є навантажувальним. Ефективне значення цього струму: де: DІ3 - діюче значення змінної складової струму збудження; W, Lз - частота змінної складової напруги живлення та індуктивність обмотки збудження. Це також обмежує частоту періодичного збудження та, як наслідок, ефективність навантаження при заданому моменті інерції якоря. Недоліком способу та приладу, що приймаються за прототип, таким чином, є обмежені можливості створення заданого навантаження, низька якість одержуваних характеристик навантаження, котра забезпечує контроль факторів безіскрової комутації струму на колекторі. В основу винаходу поставлено завдання збільшення можливостей навантаження, підвищення інформативності отримуваних результатів шляхом формування змінних напруги якоря і струму збудження двигуна, для заданих величин струму якоря і швидкості його обертання, з заданим наріжним зрушенням, контролю струмового навантаження, швидкості двигуна та рівня радіоперешкод щітково-колекторного апарату. Завдання вирішується таким чином. При навантаженні задаються якірний струм і швидкість обертання: Iя(t)=Iя0+DI·sinWt, w(t)=w0+Dw·sin(Wt+j), ¥ 2 2 I E = I0 + å I k де: j - кут зрушення між змінними складовими струму і швидкості (j змінюється в межах 0-p). Залежність якірної напруги: k =1 визначає нагрів двигуна при навантаженні. В наведеній залежності: І0 - постійна складова струму якоря; Ік - відповідні гармоніки струму якоря. На работоздатнісгь колектора впливає величина струму якоря, швидкість його обертання та похідна струму за часом. Для двигунів, працюючих в тяжких умовах, параметр dІя/dt, вимірюваний у номіналах за секунду, є нормативним. Так наприклад, для екскаваторних двигунів - це 20-25 Іном/с. Пристрій, який реалізує спосіб, має недолік, який полягає в тому, що для двигунів з невеликою електромеханічною сталою Тм створювати необхідний режим за dl/dt неможливо, тому як якір двигуна з-за малої інерційності встигає змінювати швидкість при зміні керуючого сигналу. Окрім того, пристрій не дозволяє в повному обсязі контролювати фактори, які впливають на утворення іскріння на колекторі. Ці фактори залежать, як показує досвід, і від похідної за швидкості dw/dt. Тому при іспитах необхідно задавати dw/dt та dІя/dt. Відоме рішення не дозволяє встановлювати згадані параметри і контролювати рівень радіоперешкод, які є косвеним параметром процесу іскріння. В способі процес ефективного навантаження також обмежується додатково постійною часу обмотки збудження, внаслідок чого на неї необхідно подавати форсуючу напругу для одержання заданих параметрів змінної складової струму збудження: U я (t ) = I я (t ) × R + L di я t + kF (t ) × w ( ), dt де: kF(t) - залежність коефіцієнту ЕДС двигуна в часі (kF(t)=сІз(t)). Можна записати: dw( t ) = dt = Mc + JDwW sin(Wt + j) = I я ( t ) × kF ( t ). М дв ( t ) = Mc + J Отже: kF( t ) = M c + J × Dw × W × sin(Wt + j) . I я 0 + DI × sin Wt Звідси можна записати вирази для тієї напруги, що повинна бути на якорі: U( t ) = [I я + DI × sin( Wt + j) ]× R + L × DI × W × cos( Wt + j) + + M c + J × Dw × W × cos( Wt + j) × [w0 + Dw × sin(Wt + j) ] . I я 0 + DI × sin(Wt + j) Напруга на зажимах обмотки збудження: U 3 (t ) = kF (t ) × 2 R 3 L 3 dk F (t ) + × = c c dt 40067 = R 3 M c + J × Dw × W × cos (Wt + j) L3 d + × {kF (t )}. × c I я 0 + DI × sin(Wt + j) c dt - корекцію режиму навантаження, якщо один або декілька параметрів виходять за межі заданих. При організації режиму навантаження, як відомі, задаються наступні параметри двигуна, визначені заздалегідь: Rя - активний опір якоря; Lя - індуктивність якірного ланцюга; J - момент інерції якоря; Lз - індуктивність обмотки збудження; Mс - момент холостого ходу двигуна. Залежності Uя(t) і Uз(t) в ЕОМ з цифрової форми з допомогою вбудованого або інтерфейсного цифро-аналогового перетворювача надходять на блоки 7 та 8. Якщо будь-яка з величин Ія(t), Uя(t) стають вище допустимих то з ЕОМ надходять сигнали для їхнього зниження, причому обмеження величин здійснюється програмним шляхом. Сигнал, пропорційний швидкості обертання з датчика 10 надходить на віднімальний вхід суматора 11; одержуваний сигнал помилки надходить на пороговий елемент 12 - релейний елемент, який спрацьовує при досягненні помилкою заданої величини, при цьому здійснюється аварійне захисне відключення. Радіоперешкоди, викликані комутуючим якірним струмом вимірюються з допомогою блоку 13, що являє собою антенний радіопристрій, один із варіантів якого [представлений в: P.M. Терещук, К.М. Терещук, С.А. Сєдов. Напівпровідникові приймально-підсилюючі пристрої. - С. 481, рис. VII.17], встановлюваний на відстані r£0,25 м, сигнал з блоку крізь аналогово-цифровий вхід 9 надходить на ЕОМ, де обробляється, в процесі обробки виділяється максимум рівня перешкод та частота перешкод. Сертифікаційний параметр навантажувального двигуна відповідає вимогам: Спосіб, що пропонується, реалізується в наступному порядку: - підключають якірний ланцюг і обмотку збудження двигуна до керованих джерел живлення. Розганяють двигун до заданої швидкості; - задають параметри навантажувального режиму за швидкістю обертання якоря у формі w(t)= =w0+Dw·sin(Wt+j), за струмом якоря Ія(t)=Ія0+DІ´ ´sinWt і кутом зрушення фаз між змінними складовими струму і швидкості; - обчислюють напруги перетворювачів якірного ланцюга та ланцюга збудження, що забезпечують задані значення w(t) і Ія(t) за параметрами силового ланцюга і ланцюга збудження; - задають керуючі напруги, відповідні обчисленим, в ланцюги управління перетворювачів якорю і збудження, відповідно; - вимірюють параметри навантажувального режиму w(t), Ія(t), dw/dt і dІя/dt і контролюють параметри роботи щіточно-колекторного апарату; - змінюють значення куту зрушення фаз між змінними складовими струму і швидкості обертання j і обчислюють нові значення напруг на якорі та обмотці збудження; - задають в систему нові значення керуючих напруг і контролюють параметри навантажувального режиму; - повторюють навантаження через кожні Dj= =p/3; - роблять заключення про дієздатність випробувального двигуна. Перелік фігур, що ілюструють спосіб та пристрій: Фіг. 1. - блок схема приладу, що реалізує даний спосіб навантаження. Фіг. 2 - алгоритм роботи приладу навантаження, що реалізує даний спосіб. Фіг. 3 - представлена блок-схема інформаційно-діагностичного приладу. Фіг. 4 - представлені графіки, що ілюструють роботу приладу динамічного навантаження. Прилад (фіг. 1) включає в себе двигун 1, підключений по якірному ланцюгу до тиристорного нереверсивного перетворювача 2. Обмотка збудження двигуна живиться від реверсивного тиристорного перетворювача 5. Струм якірного ланцюга контролюється датчиком струму 4, напруга - датчиком напруги 3. Струм збудження контролюється датчиком струму 6. Блоки 2 і 5 типові, включають як силовий модуль, так і систему управління тиристорами СІФУ. Системи управління 8-7 системи підпорядкованого регулювання із зворотними зв'язками по струму (якоря і збудження, відповідно). Регулятори струму у системах 7 та 8 пропорційного чи пропорційно-інтегрального типу. Всі згадані блоки і елементи - типові прилади систем автоматичного управління електроприводами. Блок 9 - керуюча ЕОМ, що реалізує наступні функції: - вимір параметрів режиму навантаження Ія(t), Uя(t), j(t), w(t); - визначення і завдання, в відповідні системи управління, законів зміни Uя(t), U3(t); w0=wн, ІЕ=ІН, dк=1 при dw dt = A; dI dt = B. Параметр dк - комутуючий фактор, який встановлює безіскрову так звану темну комутацію [Гемке В.Д. Неисправности электрических машин. С. 128]. Параметру dк відповідає деякий максимальний рівень радіоперешкод. Якщо параметр В не заданий, то в умовах навантаження параметром, котрий змінюється, буде А. На фіг. 2. представлений алгоритм роботи приладу навантаження що реалізує даний спосіб. Процес навантаження розпочинається із підключення силових ланцюгів системи; машину розганяють до швидкості, відповідної постійній, що складає wз(t); на наступному етапі в ЕОМ вводяться дані за параметрами, заміряними раніше; після цього задають параметри, що організують режим навантаження: швидкість обертання та струм якоря (змінні і постійні складові), а також кут зрушення фаз між змінними складовими; весь обсяг даних ЕОМ обробляє і, у відповідності з заданим законом управління, формує сигнали управління перетворювачами Uуя(t) та Uуз(t), що корегуються регуляторами відповідних ланцюгів і поступають на керуючі входи перетворювачів; в період навантаження вимірюються величини: напруга якоря 3 40067 - прилад для введення інформації 10, її виводу та відображення 4 (клавіатура управління, дисплей, друкуючий прилад) та зв'язку з об'єктом (прилад здійснює прийом та передачу даних в зручній для обробки формі шляхом перетворення сигналів з датчиків блоком вторинних датчиків 1, передачі одержаних сигналів на аналоговий мультиплексор 2, з якого інформація поступає на АЦП 3, та в цифровому вигляді записується до ЕОМ 6; процес видачі керуючих сигналів здійснюється ЕОМ по каналу цифро-аналогового перетворення, що складають безпосередньо ЦАП 10, аналоговий демультиплексор 9 та підсилюючий блок 7 і 8, сигнали з якого є задавальними для перетворювачів; контроль та управління здійснюється мікроконтролером 5 за командами ЕОМ). На фіг. 4 представлені графіки, що ілюструють роботу приладу динамічного навантаження. Графіки отримані шляхом моделювання системи навантаженню з параметрами машини постійного струму незалежного збудження П31М: Рн=1,4 кВт; Uн=220 B; nн=3000об/мин; hн=91%; Мн=4,45 Нм; Rя=2,7 Oм; Rдод=0,081 Oм; Rз=314 Ом; Lя=87 мГн; Ія=8,7 А; kF=0,63 B/c; J=0,021 кг/м2; Роз=0,22 кВт; Іоз=1 А; Uoз=220 B. Результати являють, формування навантажувального режиму із заданими параметрами за швидкістю w(t)=w0+Dw·sin(Wt+j), за струмом якоря Ія(t)=Iя0+DI·sinWt, при цьому амплітуди струму і швидкості взаємопов’язані, та надуживання будьякої з них за межами допустимого призводить до зміни відпрацьованого сигналу, потік збудження на час пуску форсується, зменшуючи початковий кидок струму, у всіх передбачених режимах поток є знакозмінним. Варіюючи частотою чи амплітудою змінних складових, формуються необхідні параметри dw/dt і dІя/dt. (Uя(t)), струм якоря (Iя(t)), струм збудження (Із(t)), напруга збудження (Uз(t)), швидкість обертання (w(t)), шумове тло (Uш(t)), параметри di/dt та dw/dt; по закінченні деякого часу змінюється кут зрушення між змінними складовими струму і швидкості; процес навантаження при заданих Ія(t) та w(t) здійснюють для ряду значень кута j, причому можна вжити діапазон зміни (0-p) з інтервалом 30°. Максимальне значення рівня радіопомех відповідає допустимій шумовій зоні. Одержані результати систематизуються та оформлюються у вигляді файлу-звіту. За отриманими даними робиться висновок про технічний стан машини. На фіг. 3 представлена блок-схема інформаційно-діагностичного приладу. Прилад виконує наступні функції: - автоматичний вимір контрольних величин, їхня обробка та оперативне видача для контролю при провадженні операцій іспиту; - створення систем автоматичного управління процесом іспиту з метою підтримання тих чи інших параметрів в межах заданих; - одержання додаткової інформації для визначення діагностичних признаків з метою вирішення задач по визначенню якісних характеристик дієздатності електричних машин; - підготовка та видача документації на випробувані електричні машини. В свій склад інформаційно-діагностичний комплекс включає наступні елементи: - систему датчиків фізичних величин 1 (напруг, струмів, радіопомех), що характеризують режими роботи випробуваної електричної машини в її електричній та механічній частинах; - обчислювальний прилад 6, як такий може виступати спеціалізована ЕОМ або мікропроцесор; 4 40067 Фіг. 1 5 40067 Фіг. 2 6 40067 Фіг. 3 7 Фіг. 4 40067 8 40067 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 9
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of dynamic loading of direct-current engine of independent excitation and device for its implementation
Автори англійськоюRodkin Dmytro Yosypovych, Luhovyi Anatoliy Vasyliovych, Bialobrzevskyi Oleksiy Volodymyrovych, Dobretsov Volodymyr Valentynovych, Pasmurskykh Oleksandr Oleksiyovych, Velychko Tetiana Volodymyrivna, Voshun Oleksiy Mykolayovych
Назва патенту російськоюСпособ динамической нагрузки двигателя постоянного тока независимого возбуждения и устройство для его реализации
Автори російськоюРодькин Дмитрий Иосифович, Луговой Анатолий Васильевич, Бялобржевский Алексей Владимирович, Добрецов Владимир Валентинович, Пасмурских Александр Алексеевич, Величко Татьяна Владимировна, Вошун Алексей Николаевич
МПК / Мітки
МПК: G01R 31/34
Мітки: двигуна, навантаження, незалежного, збудження, динамічного, струму, здійснення, спосіб, постійного, пристрій
Код посилання
<a href="https://ua.patents.su/9-40067-sposib-dinamichnogo-navantazhennya-dviguna-postijjnogo-strumu-nezalezhnogo-zbudzhennya-ta-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб динамічного навантаження двигуна постійного струму незалежного збудження та пристрій для його здійснення</a>
Спосіб випробування двигунів постійного струму незалежного збудження та пристрій для його здійснення
Номер патенту: 28976
Опубліковано: 16.10.2000
Автори: Нечаєва Світлана Володимирівна, Веласко Ангуло Херардо, Родькін Дмитро Йосипович
МПК: G01R 31/34
Мітки: постійного, здійснення, струму, спосіб, випробування, пристрій, збудження, незалежного, двигунів
Формула / Реферат:
Способ испытания двигателей постоянного тока независимого возбуждения включает подключение якоря двигателя к источнику переменного напряжения, изменение амплитуды этого напряжения, измерение эффективного и среднего значений тока якоря, а также среднего значения скорости за период воздействия, получение данных из результатов нагружения о качестве электрической машины, отличающийся тем, что нагружение двигателя осуществляют путем подключения...
Прилад для захисту від короткого замикання тиристорного електропривода з двигуном постійного струму незалежного збудження
Номер патенту: 11858
Опубліковано: 25.12.1996
Автори: Дубинський Андрій Олександрович, Хорунжий Юрій Валентинович
МПК: H02H 7/08
Мітки: струму, захисту, короткого, електропривода, замикання, постійного, незалежного, тиристорного, прилад, збудження, двигуном
Формула / Реферат:
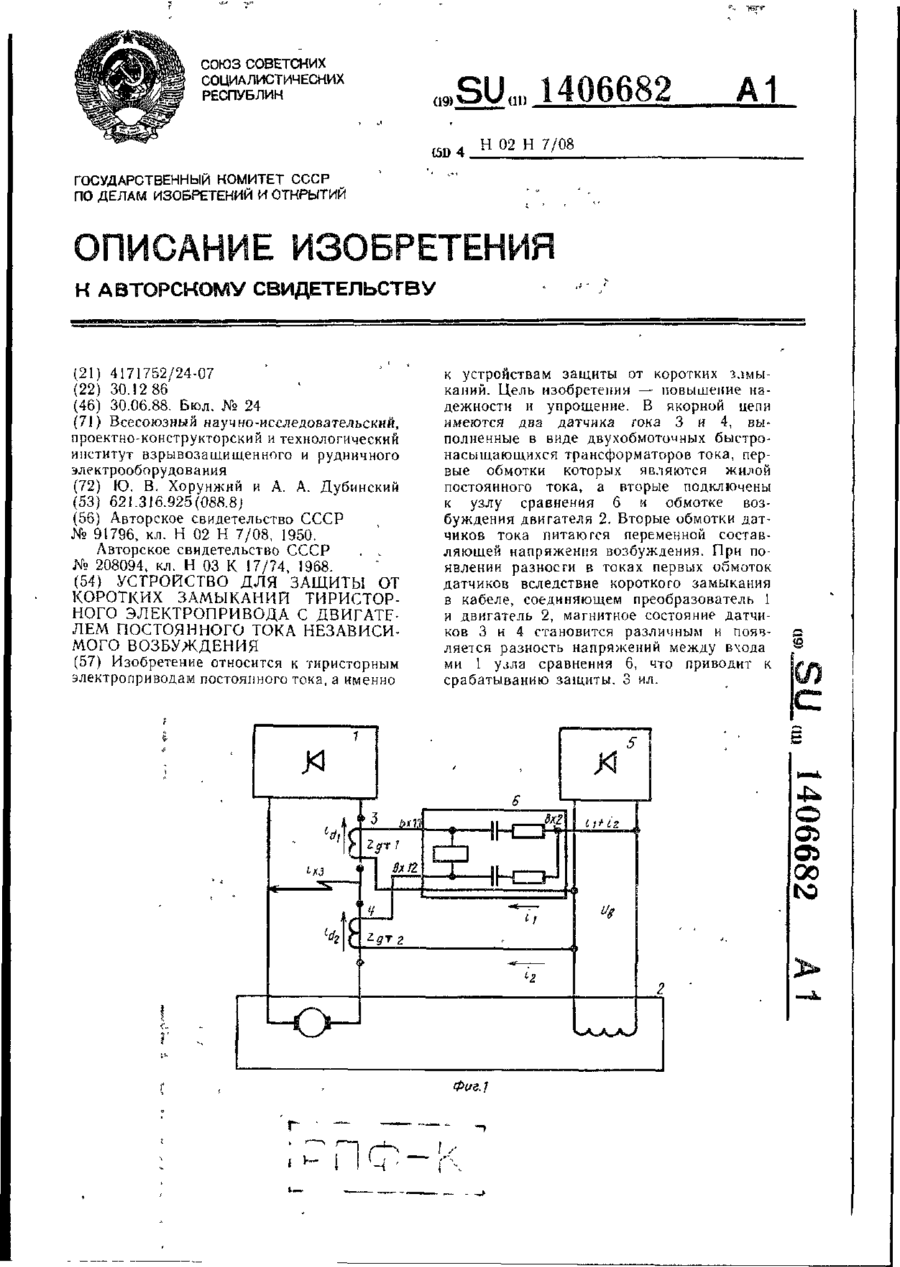
Устройство для защиты от коротких замыканий тиристорного электропривода с двигателем постоянного тока независимого возбуждения, содержащее два датчика тока, при этом первичная обмотка первого датчика тока содержит клеммы для включения в якорную цепь упомянутого двигателя, первые выводы вторичных обмоток датчиков тока подсоединены к соответствующим входам узла сравнения, отличающееся тем, что, с целью повышения надежности и упрощения,...
Спосіб рекуперативного генераторного гальмування тягового електродвигуна постійного струму незалежного збудження
Номер патенту: 24459
Опубліковано: 21.07.1998
Автори: Кравчун Степан Іванович, Папашев Олег Хайруллович, Скиданов Володимир Михайлович, Овраченко Андрій Анатолійович, Павлов Віктор Борисович, Астапов Юрій Арсенйович, Юрченко Олег Миколайович, Кривицький Ігор Олександрович
МПК: H02P 7/18
Мітки: спосіб, рекуперативного, електродвигуна, постійного, генераторного, тягового, незалежного, збудження, струму, гальмування
Формула / Реферат:
Способ рекуперативного генераторного торможения тягового электродвигателя постоянного тока независимого возбуждения, заключающийся в плавном увеличении магнитного потока обмотки независимого возбуждения при скорости вращения электродвигателя постоянного тока выше номинальной, работающего в генераторном режиме и питающегося от ступенчато переключающейся аккумуляторной батареи, отличающийся тем, что при достижении электродвигателем номинальной...
Система релейного управління збудженням двигуна постійного струму
Номер патенту: 33414
Опубліковано: 15.02.2001
Автори: Шевченко Наталія Іванівна, Зеленов Анатолій Борисович
МПК: H02P 7/06
Мітки: система, збудженням, управління, двигуна, струму, релейного, постійного
Текст:
...релейний регулятор з суматором на його вході, до якого під'єднані сигнал завдання та вихід датчика ерс цього тиристорного збуджувача, а вхід з датчика під'єнаний до виходу тиристорного збуджувача, у відповідності з винаходом додатково вводяться датчики струму збудження, ерс та швидкості двигуна, входи яких підімкнені до відповідних виходів двигуна, а виходи датчиків струму збудження і ерс двигуна з'єднані з входами комутатора...
Спосіб визначення параметрів системи управління з двигуном постійного струму та пристрій для його здійснення
Номер патенту: 20167
Опубліковано: 25.12.1997
Автор: Аркадьєв Віктор Юрьєвич
МПК: H02K 15/00, G06G 7/00, G01R 31/34
Мітки: визначення, постійного, управління, параметрів, системі, двигуном, здійснення, пристрій, струму, спосіб
Формула / Реферат:
1. Способ определения параметров систем управления с двигателем постоянного тока, включающий измерение тока і и напряжения U якоря двигателя, скачкообразное изменение задающего воздействия от блока задающих сигналов, отличающийся тем, что используют активно-индуктивную (RL) нагрузку, а действие внутренней связи по электродвижущей силе (ЭДС) двигателя постоянного тока реализуют на основе преобразования контура регулирования тока и с помощью...
Попередній патент: Пристрій для екранування камер радіоелектронної апаратури
Наступний патент: Спосіб ізоляції і зміцнення будівельних конструкцій та полімерна композиція для його здійснення “силор”
Випадковий патент: Спосіб зниження шкідливого впливу підземних виробіток