Міст та спосіб його стабілізації
Формула / Реферат
1. Міст, що має у своєму складі ферму (10), яка підтримується розтяжними кріпленнями (11, 12), і стабілізатори з аеродинамічною поверхнею(19, 20), які прикріплені відповідними осями обертання (21, 38), як правило, вздовж ферми (10), забезпечуючи артикуляцію до позиції, яка покращує стабільність ферми (10), який відрізняється тим, що кожен стабілізатор (19, 20) приєднаний так, щоб ним керував механізм, який діє завдяки кутовому руху між фермою (10) і прилеглим розтяжним кріпленням (11, 12) навколо подовжньої осі моста, і кожен механізм встановлений так, що, коли є кутовий рух між частиною ферми (10) і прилеглим розтяжним кріпленням (11, 12), зв'язаний з нею стабілізатор (19, 20) буде артикулювати до позиції, яка буде створювати силу, що діє на його частину ферми (10) при наявності зустрічного вітру.
2. Міст згідно з п. 1, який відрізняється тим, що кожен механізм має у своєму складі важіль (22), прикріплений до зв'язаного з ним розтяжного кріплення (11, 12) і прикріплений до ферми (10) віссю обертання (23), як правило, паралельно до осей обертання (21, 38) зв'язаного з ним стабілізатора (19, 20).
3. Міст згідно з п. 1, який відрізняється тим, що кожен механізм встановлений з метою посилення артикуляції зв'язаного з ним стабілізатора (19, 20) у відповідності до кутового руху.
4. Міст згідно з п. 2, який відрізняється тим, що принаймні частина стабілізаторів (19, 20) прикріплена відповідними осями обертання (21) прямо до ферми (10) і встановлена для того, щоб їх можна було артикулювати відповідними тягами (24), прикріпленими осями обертання (25, 26) до відповідних важелів (22).
5. Міст згідно з п. 1, який відрізняється тим, що принаймні частина стабілізаторів (19, 20) прикріплена відповідними осями обертання (21) прямо до ферми (10) і розміщена для того, щоб покращити аеродинамічні властивості ферми (10).
6. Міст згідно з п. 1, який відрізняється тим, що принаймні частина стабілізаторів (19, 20) прикріплена відповідними осями обертання (38) від розтяжних кріплень (11, 12).
7. Міст згідно з п. 2, який відрізняється тим, що принаймні частина стабілізаторів (19, 20) прикріплена відповідними осями обертання від відповідних важелів (22).
8. Міст згідно з п. 7, який відрізняється тим, що кожний стабілізатор (19, 20) встановлений так, щоб його артикулювала тяга (39), прикріплена віссю обертання до ферми (10).
9. Міст згідно з п. 1, який відрізняється тим, що принаймні один із стабілізаторів (19, 20) забезпечений незалежно регульованою контрольною поверхнею (126).
10. Міст згідно з п. 1, який відрізняється тим, що пара стабілізаторів (19, 20) вмонтована на протилежних сторонах ферми (10) і вони є контр-збалансованими зв'язуючою тягою (30, 34).
11. Міст згідно з п. 10, який відрізняється тим, що зв'язуюча тяга (30, 34) оперативно встановлюється між механізмами пари стабілізаторів (19, 20).
12. Спосіб стабілізації моста, що має у своєму складі ферму (10), яка підтримується розтяжними кріпленнями (11, 12), і стабілізатори з аеродинамічною поверхнею (19, 20), змонтовані на відповідних осях (21, 38), як правило, вздовж ферми (10), який відрізняється тим, що в ньому використовується кутовий рух між фермою (10) і розтяжними кріпленнями (11, 12) навколо подовжньої осі моста з метою артикуляції стабілізаторів (19, 20) до позицій, які будуть створювати силу при зустрічному вітрі, яка зменшить загальний аеродинамічний підйом ферми (10).
Текст
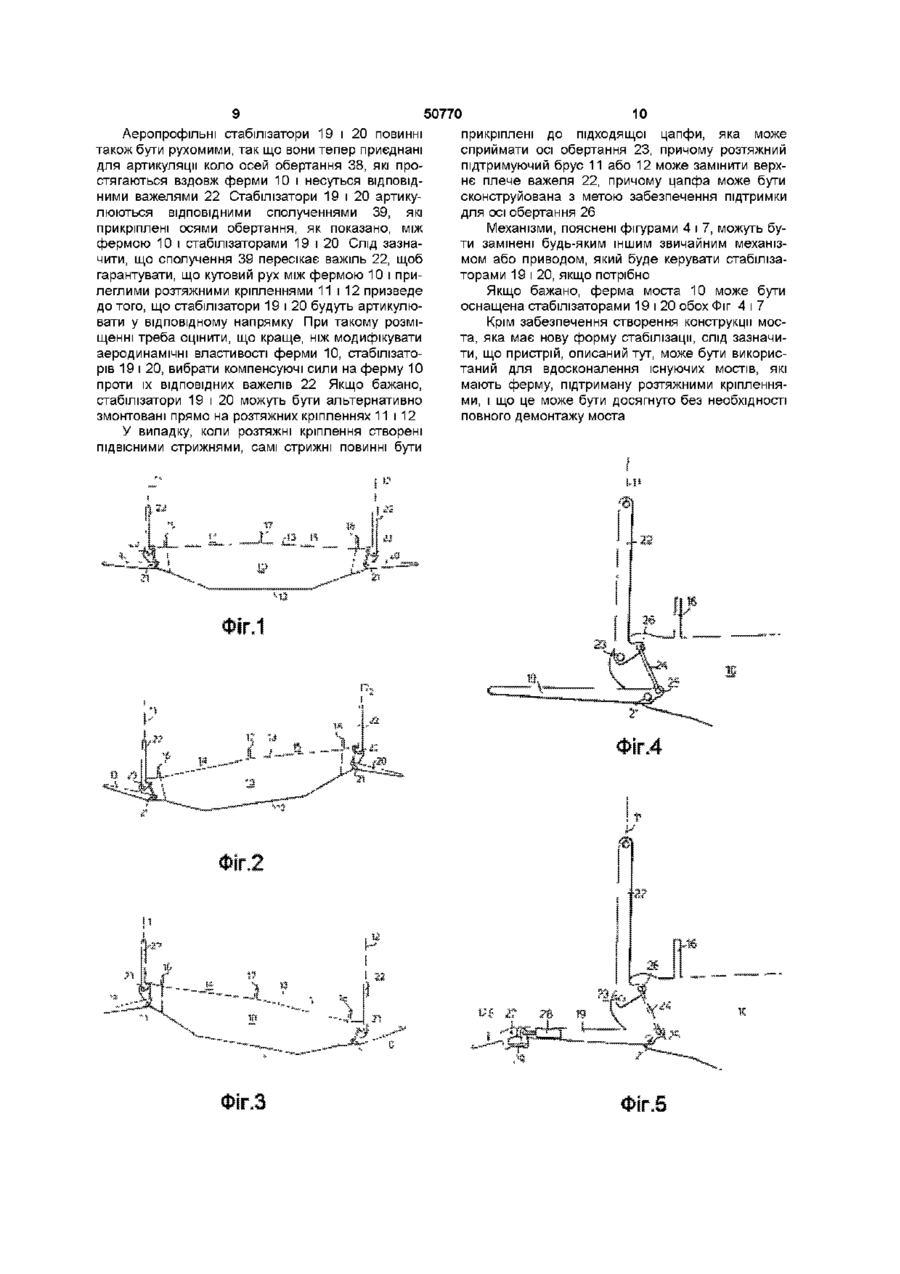
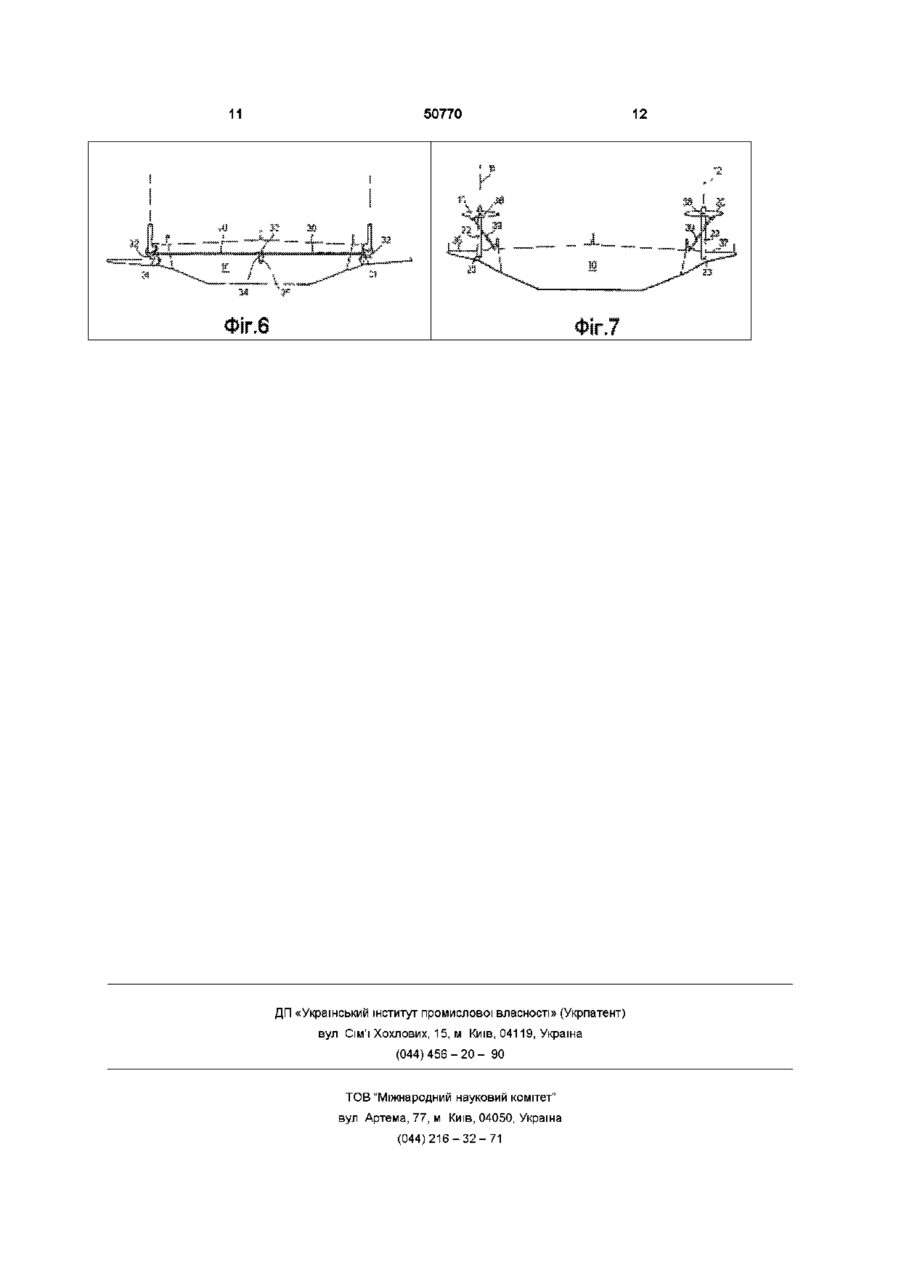
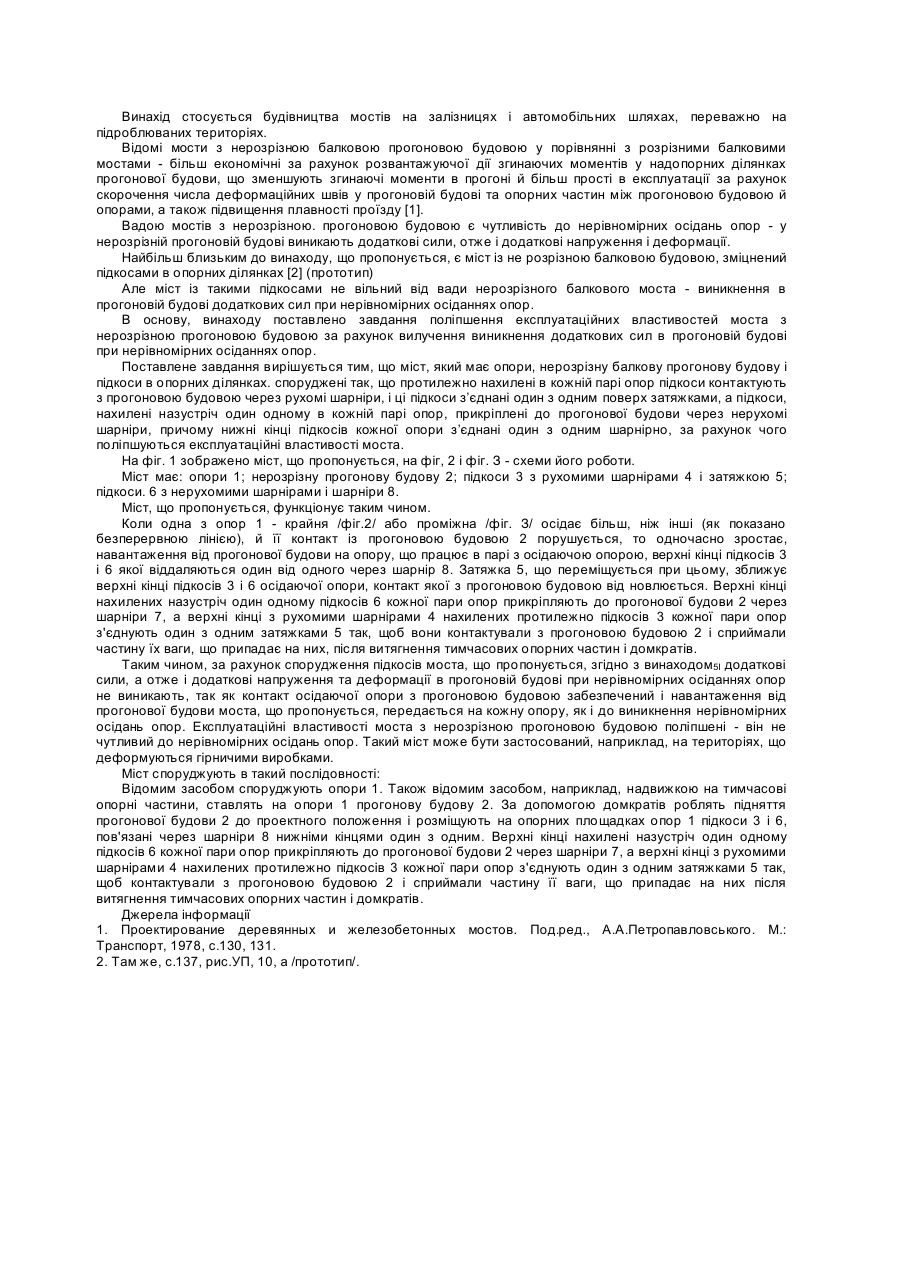
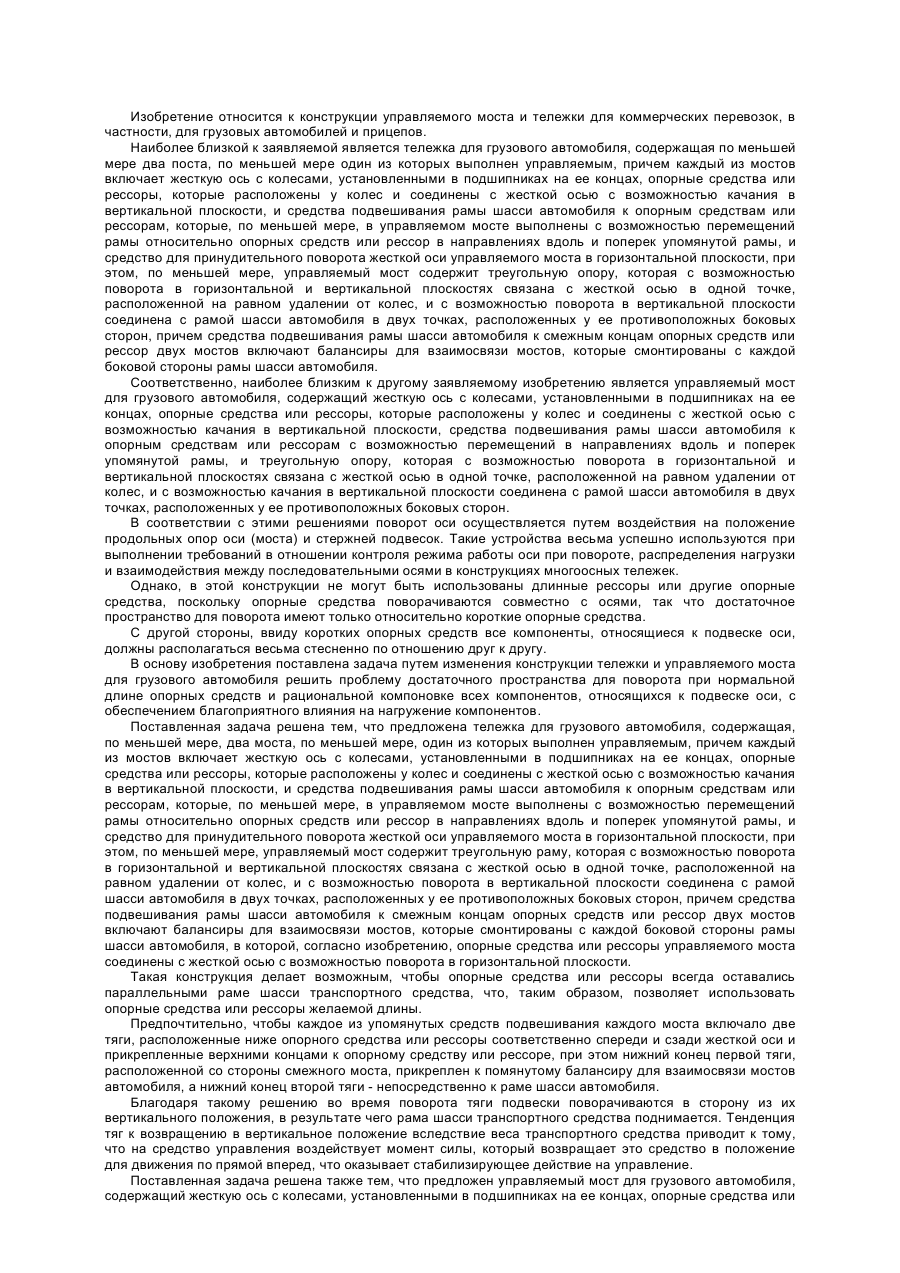
1 Міст, ЩО має у своєму складі ферму (10), яка підтримується розтяжними кріпленнями (11, 12), і стабілізатори з аеродинамічною поверхнею(19, 20), які прикріплені ВІДПОВІДНИМИ осями обертання (21, 38), як правило, вздовж ферми (10), забезпечуючи артикуляцію до позиції, яка покращує стабільність ферми (10), який відрізняється тим, що кожен стабілізатор (19, 20) приєднаний так, щоб ним керував механізм, який діє завдяки кутовому руху між фермою (10) і прилеглим розтяжним кріпленням (11, 12) навколо подовжньої осі моста, і кожен механізм встановлений так, що, коли є кутовий рух між частиною ферми (10) і прилеглим розтяжним кріпленням (11, 12), зв'язаний з нею стабілізатор (19, 20) буде артикулювати до позиції, яка буде створювати силу, що діє на його частину ферми (10) при наявності зустрічного вітру 2 Міст ЗГІДНО з п 1, який відрізняється тим, що кожен механізм має у своєму складі важіль (22), прикріплений до зв'язаного з ним розтяжного кріплення (11, 12) і прикріплений до ферми (10) віссю обертання (23), як правило, паралельно до осей обертання (21, 38) зв'язаного з ним стабілізатора (19, 20) 3 Міст ЗГІДНО з п 1, який відрізняється тим, що кожен механізм встановлений з метою посилення артикуляції зв'язаного з ним стабілізатора (19, 20) у ВІДПОВІДНОСТІ до кутового руху 4 Міст ЗГІДНО з п 2, який відрізняється тим, що принаймні частина стабілізаторів (19, 20) прикріплена ВІДПОВІДНИМИ осями обертання (21) прямо до ферми (10) і встановлена для того, щоб їх можна було артикулювати ВІДПОВІДНИМИ тягами (24), прикріпленими осями обертання (25, 26) до ВІДПОВІДНИХ важелів (22) 5 Міст ЗГІДНО з п 1, який відрізняється тим, що принаймні частина стабілізаторів (19, 20) прикріплена ВІДПОВІДНИМИ осями обертання (21) прямо до ферми (10) і розміщена для того, щоб покращити аеродинамічні властивості ферми (10) 6 Міст ЗГІДНО з п 1, який відрізняється тим, що принаймні частина стабілізаторів (19, 20) прикріплена ВІДПОВІДНИМИ осями обертання (38) від розтяжних кріплень (11, 12) 7 Міст ЗГІДНО з п 2, який відрізняється тим, що принаймні частина стабілізаторів (19, 20) прикріплена ВІДПОВІДНИМИ осями обертання від ВІДПОВІДНИХ важелів (22) 8 Міст ЗГІДНО з п 7, який відрізняється тим, що кожний стабілізатор (19, 20) встановлений так, щоб його артикулювала тяга (39), прикріплена віссю обертання до ферми (10) 9 Міст ЗГІДНО з п 1, який відрізняється тим, що принаймні один із стабілізаторів (19, 20) забезпечений незалежно регульованою контрольною поверхнею (126) 10 Міст ЗГІДНО з п 1, який відрізняється тим, що пара стабілізаторів (19, 20) вмонтована на протилежних сторонах ферми (10) і вони є контрзбалансованими зв'язуючою тягою (ЗО, 34) 11 Міст ЗГІДНО З П 10, ЯКИЙ відрізняється тим, що зв'язуюча тяга (ЗО, 34) оперативно встановлюється між механізмами пари стабілізаторів (19, 20) 12 Спосіб стабілізації моста, що має у своєму складі ферму (10), яка підтримується розтяжними кріпленнями (11, 12), і стабілізатори з аеродинамічною поверхнею (19, 20), змонтовані на ВІДПОВІДНИХ осях (21, 38), як правило, вздовж ферми (10), який відрізняється тим, що в ньому використовується кутовий рух між фермою (10) і розтяжними кріпленнями (11, 12) навколо подовжньої осі моста з метою артикуляції стабілізаторів (19, 20) до позицій, які будуть створювати силу при зустрічному вітрі, яка зменшить загальний аеродинамічний підйом ферми (10) О 1 о ю 50770 Цей винахід відноситься до стабілізації мостів, що мають у своєму складі ферму, яку підтримують розтяжні кріплення, і забезпечує як створення стабілізованої конструкції моста, так і спосіб стабілізації існуючого моста РІЗНІ ТИПИ МОСТІВ мають ферму, яку підтриму ють розтяжні кріплення від опор або інших подібних конструкцій, встановлених на кінцях або посередині між кінцями моста У випадку ПІДВІСНОГО моста розтяжними кріпленнями є, як правило, вертикальні троси, стрижні або ланцюги, які прив'язують кожну подовжню сторону ферми до відповідної ланцюгової лінії, підвішеної між опорами Укріплений тросом міст також має у своєму складі ферму, яка підтримується розтяжними кріпленнями, як правило, у формі стрижнів або тросів, які простягаються від подовжніх сторін ферми прямо до опор Із нещастя з мостом Такома в 1940р добре відомо, що ПІДВІСНИЙ міст може потерпіти драматичне пошкодження конструкції через вібраційну нестабільность під дією на нього помірного вітрового навантаження, яке викликає резонансну осциляцію ферми, яка прогресує, поки не відбудеться руйнація Проблеми, пов'язані з вітровим навантаженням, для ПІДВІСНИХ мостів і, по суті, всіх мостів, що містять ферму, яку підтримують розтяжні кріплення, стають набагато більш жорсткими, коли відстань між опорами (прогін) ферми збільшується При дуже довгому прогоні наприклад такому який запропоновано для магістралей Мессіни, вітрове навантаження вздовж прогону може значно коливатись і сприяти суттєвому асиметричному розкачуванню і переміщенню ферми 3 тих пір, як міст Такома потерпів біду, були зроблені різноманітні пропозиції, направлені на вирішення цієї проблеми Наприклад, в Европейському патенті 0233528 було запропоновано, що ПІДВІСНИЙ МІСТ, ЯКИЙ МІСТИТЬ у своєму складі підвісну конструкцію, створену похилими дротами і вертикальними опорами і підвішеною на підвісну конструкцію, може бути стабілізований аеродинамічними елементами, які мають форму, подібну до профілю крила літака, і жорстко прикріплені до конструкції моста, щоб контролювати дію вітру на конструкцію аеродинамічні елементи складаються з крилоподібних контрольних поверхонь, які мають симетричний профіль і аеродинамічну позитивну або негативну підйомну реакцію і швидкість вібрації, значно вищу, ніж швидкість вібрації, притаманна конструкції моста, при цьому крилоподібні поверхні кріпляться якраз під боковими краями конструкції ферми моста, і їх площина симетрії похилена відносно горизонтальної площини, конструкція моста і крилоподібні контрольні поверхні взаємодіють динамічно, змінюючи швидкість вібрації цілого принаймні вище верхнього рівня швидкості вітру, очікуваного в зоні моста Замість використання аеропрофілей, жорстко прикріплених до конструкції моста, Міжнародна патентна заявка PCT/GB93/01862 (номер публікації W094/05862) пропонує, що ферму моста можна зробити менш жорсткою, ніж ферми існуючих мостів, шляхом використання закрилок або елеронів, розміщених на бокових краях ферми моста, при цьому закрилки або елерони прикріплені осями обертання від ферми моста, забезпечуючи артикуляцію між розтягуючою і втягуючою позиціями, і контролюються комп'ютером з метою регулювання сил, що діють на ферму моста у ВІДПОВІДЬ на вітрове навантаження Міжнародна патентна заявка PCT/DK-93/00058 (номер публікації WO 93/16232) пропонує систему для протидії осциляціям, викликаним вітром в фермі моста на мостах, що тримаються на довгих тросах, в якій встановлена множина контрольних площин (лобових поверхонь) по суті симетрично вздовж подовжніх осей моста, призначена для використання енергії вітру у ВІДПОВІДЬ на рух ферми моста з метою зменшення згаданого руху, при цьому контрольні площини поділені на секції у подовжньому напрямі моста, і встановлена множина детекторів, призначених для вимірювання руху ферми моста, і з кожною контрольною секцією площин зв'язаний локальний контрольний елемент, адаптований для контролю секції контрольної площини, про яку іде мова, у ВІДПОВІДЬ на інформацію від одного або більше детекторів Ці детектори встановлені для вимірювання рухів або прискорень моста у розглядуваній точці і передачі сигналу до контрольного елементу, наприклад, комп'ютера, який використовує алгоритм, посилаючи команду до допоміжного насосу, що контролює гідравлічний циліндр, обертати зв'язану з ним секцію контрольної площини Таким чином, можна безперервно регулювати кожну секцію контрольної площини у ВІДПОВІДНОСТІ з рухом ферми моста у точці, про яку іде мова, згідно з даними детекторів у вигляді акселерометрів Цей винахід по суті вимагає забезпечення створення комплексної електронної системи, яка має у своєму складі значну КІЛЬКІСТЬ акселерометрів, прив'язаних за допомогою обширної системи дротів вздовж ферми моста до комп'ютерів, і зв'язану з ним гідравлічну систему, яка керує контрольними площинами Таким чином, із цих попередніх документів відомо, що міст має у своєму складі ферму, яку підтримують розтяжні кріплення, і аеропрофільні стабілізатори, прикріплені осями обертання, як правило, вздовж ферми, забезпечуючи артикуляцію в положення, яке поліпшує стабільність ферми Із цих документів відоме також забезпечення способу стабілізації моста, що має ферму, яку підтримують розтяжні кріплення, який полягає у встановленні аеропрофільних стабілізаторів коло ВІДПОВІДНИХ осей, як правило, вздовж ферми Розкриття винаходу Об'єктом цього винаходу є забезпечення можливості стабілізації моста без використання обширної електронної сенсорної і контрольної системи Згідно З ОДНИМ аспектом винаходу кожен стабілізатор приєднаний так, щоб ним керував механізм, який може діяти при кутовому русі між фермою і прилеглим розтяжним кріпленням коло подовжньої осі моста, і кожен механізм встановлений так, що, коли є кутовий рух між частиною ферми і прилеглим розтяжним кріпленням, зв'язаний з ним стабілізатор буде артикулювати в положення, яке створить силу на його частині ферми при 50770 наявності зустрічного вітру Таким чином можливо стабілізувати міст шляхом мінімізації співвідношення між обертовим і вертикальним рухами ферми, при цьому гасячи будь-яку тенденцію конструкції до вібрації Переважно кожен механізм має у своєму складі важіль, який прикріплений до зв'язаного з ним розтяжного кріплення і прикріплений оссю обертання до ферми, як правило, паралельною до осі обертання зв'язаного з ним стабілізатора Кожен механізм може бути встановлений для того, щоб підсилювати артикуляцію зв'язаного з ним стабілізатора відносно кутового руху Принаймні частина стабілізаторів може бути прикріплена ВІДПОВІДНИМИ осями обертання прямо до ферми і встановлюватись так, щоб мати можливість артикулювати за допомогою ВІДПОВІДНИХ тяг, прикріплених осями обертання до ВІДПОВІДНИХ важелів Принаймні частина стабілізаторів може бути прикріплена за допомогою ВІДПОВІДНИХ осей обертання прямо до ферми і встановлюватись так, щоб покращити аеродинамічні властивості ферми Альтернативно принаймні частина стабілізаторів може бути прикріплена за допомогою ВІДПОВІДНИХ осей обертання або від розтяжних кріплень, або від ВІДПОВІДНИХ важелів У цьому випадку кожен стабілізатор встановлений переважно так, щоб він міг артикулюватись за допомогою тяги, прикріпленої оссю обертання до ферми Принаймні один із стабілізаторів може бути забезпечений незалежно регульованою контрольною поверхнею Таким чином контрольна поверхня може регулюватись відносно стабілізатора, при цьому змінюючи силу, яку створює стабілізатор, направлену на ферму Стабілізатори встановлюються переважно парами, які монтуються на протилежних сторонах ферми і є контр-збалансованими за допомогою сполучного шарнірного зв'язку У цьому випадку сполучний шарнірний зв'язок оперативно встановлений переважно між механізмами пари стабілізаторів Згідно З ІНШИМ аспектом винаходу, спосіб стабілізації моста, що має ферму, яку підтримують розтяжні кріплення, і який має аеропрофільні стабілізатори, вмонтовані коло ВІДПОВІДНИХ осей, як правило, вздовж ферми, який має у своєму складі використання кутового руху між фермою і розтяжними кріпленнями коло подовжньої осі моста, щоб артикулювати стабілізатори в положення, які при наявності зустрічного вітру можуть створювати силу, здатну зменшити загальний аеродинамічний підйом на ферму Короткий опис креслень Тепер винахід буде описаний тільки шляхом прикладу, з посиланням на супроводжуючі креслення, в яких Фіг 1 є діаграмний поперечний розріз ферми моста, стабілізованого згідно з цим винаходом, Фіг 2 є вигляд, подібний до Фіг 1, але який ілюструє рух пари стабілізаторів під час кутового руху в одному напрямі між фермою і прилеглим розтяжним кріпленням коло продольної осі моста, Фіг 3 Є ВИГЛЯД, подібний до Фіг 2, але який ілюструє рух стабілізаторів під час кутового руху в протилежному напрямі між фермою і прилеглим розтяжним кріпленням, Фіг 4 є збільшення лівої частини Фіг 2, яка ілюструє одну форму механізму, діючого за допомогою кутового руху між фермою і прилеглим розтяжним кріпленням, Фіг 5 є вигляд, подібний до Фіг 4, але який показує модифікацію профільних стабілізаторів, Фіг 6 є вигляд, подібний до Фіг 1, але який ілюструє контр-балансування пари стабілізаторів, і Фіг 7 є вигляд, подібний до Фіг 1, але який ілюструє альтернативний монтаж стабілізаторів на різних фермах моста Опис Добре відомо, що ПІДВІСНІ мости з великими відстанями між опорами (прогонами) мають тенденцію потерпати від подібної до вібрації нестабільності в умовах дуже сильних вітрів Одним з ПІДХОДІВ до вирішення цієї проблеми може бути підвищення жорсткості при крутінні ферми моста, при цьому збільшуючи швидкість вітру, при якій виникає нестабільність Це досягається за допомогою звичайних конструкторських методів, які неминуче збільшують вагу ферми моста і, отже, також збільшується вага ПІДВІСНИХ тросів і їх підтримуючих конструкцій Альтернативним підходом може бути підсилення стабільності ферми моста за допомогою активно керованих аеропрофілів Така активна стабілізація точно відповідає практиці, уже прийнятій в авіаційних системах управління, коли аеропрофілі або ІНШІ системи управління (сервіси) ВІДПОВІДНО відхиляються від прямого напряму за допомогою гідравлічних, пневматичних або електричних силових приводів у ВІДПОВІДЬ на чутливий рух літального апарату, який у цьому випадку є окремою частиною гнучкої конструкції ферми моста, яку треба стабілізувати Цей винахід забезпечує альтернативний ПІДХІД до активної стабілізації регулюючими аеропрофілями механічно за допомогою з'єднуючих елементів, приєднаних до ПІДВІСНИХ елементів моста Таким способом стабілізація може бути досягнута без використання множини акселерометрів і зв'язаних з ним дротів, комп'ютерних контрольних і сервісних систем, які були запропоновані для артикуляції аеропрофілей за допомогою гідравлічних, пневматичних або електричних силових приводів Посилаючись на Фіг 1, 2 і 3, ПІДВІСНИЙ МІСТ має у своєму складі ферму 10, яка підтримується від двох не показаних ланцюгів двома серіями розтяжних кріплень 11 і 12, які, як правило, використовуються у вигляді стрижнів або тросів Фермою моста може бути будь-яка звичайна конструкція, відома в промисловості, і, як правило, має у своєму складі коробчату ферму 13, яка визначає проїжджі частини 14, 15, розділені виступаючими бордюрами 16, 17 і 18 Незалежно від и специфічного профілю поперечного розрізу, ферма 10 має аеродинамічні властивості, коли на неї діє зустрічний вітер, і її стабільність контролюється двома серіями аеропрофільних стабілізаторів 19 і 20, розміщених вздовж кожного подовжнього краю ферми 10 Кожний стабілізатор приєднаний до ферми 10 за допомогою осі обертання 21, щоб забезпечити артикуляцію коло осі, яка, як правило, є подовж 50770 ньою відносно ферми, при цьому даючи можливість артикуляції стабілізаторам 19, 20, до позиції, яка створює силу при зустрічному вітрі, щоб зменшити загальний аеродинамічний підйом зв'язаної з ним частини ферми 10 Нижні КІНЦІ розтяжних кріплень 1 1 , 12 дуже жорстко прикріплені до КІНЦІВ важелів 22, які також прикріплені до ферми 10 ВІДПОВІДНИМИ осями обертання 23, при цьому забезпечуючи кутовий рух між кожним розтяжним кріпленням 11 або 12 і фермою 10 навколо осей обертання 23, які, як правило, паралельні до осі 21 ВІДПОВІДНОГО стабілізатора Як краще видно із Фіг 4, з'єднуючий елемент 24 приєднаний за допомогою осі обертання 25 до стабілізатора 19 у точці, розміщеній на відстані від осі обертання 2 1 , а також оссю обертання 26 до важеля 22 у точці, розміщеній на відстані від осі обертання 23, при цьому осі обертання 2 1 , 23, 25 і 26 паралельні Таким чином, будь-який кутовий рух між фермою 10 і розтяжним кріпленням 11 може спричинити відносний кутовий рух важеля 22 коло його осі обертання 23, при цьому спричиняючи до того, що з'єднуючий елемент 24 передає цей рух до стабілізатора 19, який буде обертатись у тому ж напрямі коло своєї осі обертання 21 Слід зазначити, що ефективне плече між осями обертання 23 і 26 більше, ніж між осями обертання 21 і 25, причому відносний кутовий рух важеля 22 спричиняє посилений рух стабілізатора 19 Слід також зазначити, що важіль 22 і з'єднуючий елемент 24, разом з ВІДПОВІДНИМИ осями обертання 21, 23, 25 і 26 створюють механізм, який може діяти при кутовому русі між фермою 10 і прилеглим до неї розтяжним кріпленням 11 Таким чином будь-який рух при крутінні ферми 10 моста відносно будь-якого - розтяжного кріплення 11 або 12 може спричинити артикуляцію прилеглого стабілізатора 19 або 20, при цьому покращуючи аеродинамічні властивості ферми 10 Так, на фіг 2 поворот проти часової стрілки частини ферми 10 одночасно спричиняє до того, що лівий стабілізатор 19 піднімається , в той час, як правий стабілізатор 20 опускається Таким чином стабілізатори 19 і 20 здійснюють повернення на своє місце ферми 10 незалежно від того, звідки дме зустрічний вітер зліва чи справа На фіг 3 ферма 10 обернулась за годинниковою стрілкою, і можна помітити , що рух стабілізаторів 19 і 20 змінився подібним чином, так що вони знову здійснюють повернення на своє місце ферми 10 Слід, зокрема, зазначити, що відхилення стабілізаторів 19 і 20 завжди посилює стабільність ферми 10, незалежно від того, чи вітер дме зліва, чи справа Співвідношення відстаней між осями обертання 23 і 26 і осями обертання 21 і 25 залежить від динаміки ферми 10 і її ПІДВІСОК 1 1 , 12 і може бути визначене шляхом вітрових тунельних тестів і/або теоретичних розрахунків Співвідношення для деяких конструкцій мостів залежить від розташування відносно прогону моста конкретного стабілізатора 19 або 20 На Фіг 5, більшість компонентів еквівалентні таким же на Фіг 4 і позначені тими ж номерами, як 8 такі, що мають ту ж саму функцію Єдина модифікація полягає в тому, що ЗОВНІШНІЙ кінець стабілізатора 19 оснащений незалежно регульованою контрольною поверхнею 126, яка приєднана до стабілізатора 19 за допомогою осі обертання 27, яка є паралельною до осі обертання 21 Контрольна поверхня 126 може артикулювати коло своєї осі обертання 27, відносно стабілізатора 19, за допомогою силового приводу 28, який розміщений всередині стабілізатора 19, як показано, і керує контрольною поверхнею 126 через зчеплення 29 Силовий привод може діяти механічно, щоб встановити контрольну поверхню 126 в положення, яке б надало стабілізатору 19 бажану характеристику для частини ферми, до якої він прикріплений, або може діяти електрично, пневматично або гідравлічно, причому характеристики стабілізатора 19 можна безперервно регулювати Перевагою механічно з'єднаного облаштування стабілізатора, такого як описане з посиланням на Фіг 1-4, є відсутність будь-яких великих силових приводів, які очевидно, потребували б безперервно наявного джерела енергії, навіть серед ураганно сильних вітрів, і відсутність комп'ютерів і акселерометрів Але ПІДХІД активного керування, спільно з порівнювальними авіаційними системами, виключно гнучкий, оскільки зміни в системі керування можна здійснити відносно легко, і функціональна складність може бути забезпечена, якщо необхідно Привабливість комбінованого виконання, представленого фігурою 5, полягає в тому, що можна використати кращі риси обох ПІДХОДІВ Таким чином може бути досягнута перевага великих механічно керованих стабілізаторів 19, 20, і їх функція може бути посилена за допомогою малих активно керованих поверхонь 126 подібно до трімеру на авіаційному рулі висоти Таким чином, в загальному стабілізація може здійснюватись великими механічно діючими стабілізаторами, 19 і 20, в той час як малі активно керовані поверхні 126 можуть виконувати тонку настройку, будучи невибагливими щодо розміру, вартості, енергетичних затрат і ЦІЛОСНОСТІ у порівнянні з одиничною активно керованою системою Фіг 6 показує конструкцію, яка взагалі є тією ж самою, що і уже описана з посиланням на Фіг 1-4, і ВІДПОВІДНО з тією ж нумерацією, яка була використана для позначення еквівалентних деталей ВІДМІННІСТЬ полягає втому, що маси стабілізаторів 19 і 20 збалансовані за допомогою зв'язуючих сполучень ЗО, які мають ЗОВНІШНІ КІНЦІ, приєднані до подовження 31 стабілізатора, які вмонтовані ВІДПОВІДНИМИ осями обертання 32, паралельними осям обертання 21 і 23 Внутрішні КІНЦІ сполучень ЗО приєднані за допомогою простої осі обертання 33 до сполучення 34, яке може обертатись навколо осі обертання 35, яку несе ферма моста 10 Таким чином, маси поперечно укладеної пари стабілізаторів 19 і 20 контр-збалансовані незалежно від їх артикуляції На Фіг 7 ферма моста 10 має дещо іншу конструкцію, оскільки важелі 22 змонтовані на осях обертання 23, розміщених всередині ЗОВНІШНІХ ПОДОВЖНІХ країв ферми 10, при цьому визначаючи ПІШОХОДНІ дороги 36 і 37 50770 Аеропрофільні стабілізатори 19 і 20 повинні також бути рухомими, так що вони тепер приєднані для артикуляції коло осей обертання 38, які простягаються вздовж ферми 10 і несуться ВІДПОВІДНИМИ важелями 22 Стабілізатори 19 і 20 артикулюються ВІДПОВІДНИМИ сполученнями 39, які прикріплені осями обертання, як показано, між фермою 10 і стабілізаторами 19 і 20 Слід зазначити, що сполучення 39 пересікає важіль 22, щоб гарантувати, що кутовий рух між фермою 10 і прилеглими розтяжними кріпленнями 11 і 12 призведе до того, що стабілізатори 19 і 20 будуть артикулювати у відповідному напрямку При такому розміщенні треба оцінити, що краще, ніж модифікувати аеродинамічні властивості ферми 10, стабілізаторів 19 і 20, вибрати компенсуючі сили на ферму 10 проти їх ВІДПОВІДНИХ важелів 22 Якщо бажано, стабілізатори 19 і 20 можуть бути альтернативно змонтовані прямо на розтяжних кріпленнях 11 і 12 У випадку, коли розтяжні кріплення створені ПІДВІСНИМИ стрижнями, самі стрижні повинні бути 10 прикріплені до підходящої цапфи, яка може сприймати осі обертання 23, причому розтяжний підтримуючий брус 11 або 12 може замінити верхнє плече важеля 22, причому цапфа може бути сконструйована з метою забезпечення підтримки для осі обертання 26 Механізми, пояснені фігурами 4 і 7, можуть бути замінені будь-яким іншим звичайним механізмом або приводом, який буде керувати стабілізаторами 19 і 20, якщо потрібно Якщо бажано, ферма моста 10 може бути оснащена стабілізаторами 19 і 20 обох Фіг 4 і 7 Крім забезпечення створення конструкції моста, яка має нову форму стабілізації, слід зазначити, що пристрій, описаний тут, може бути використаний для вдосконалення існуючих мостів, які мають ферму, підтриману розтяжними кріпленнями, і що це може бути досягнуто без необхідності повного демонтажу моста 11 50770 ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна ( 0 4 4 ) 4 5 6 - 2 0 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71 12
ДивитисяДодаткова інформація
Назва патенту англійськоюBridge and method for its stabilization
Назва патенту російськоюМост и способ его стабилизации
МПК / Мітки
МПК: E01D 11/00
Мітки: спосіб, міст, стабілізації
Код посилання
<a href="https://ua.patents.su/6-50770-mist-ta-sposib-jjogo-stabilizaci.html" target="_blank" rel="follow" title="База патентів України">Міст та спосіб його стабілізації</a>
Міст
Номер патенту: 25213
Опубліковано: 15.01.2002
Автори: Абрамов Володимир Миколайович, Шнеєр Володимир Рафаїлович
МПК: E01D 15/00
Мітки: міст
Формула / Реферат:
Міст, що має опори, нерозрізну балкову прогонову будову і підкоси в опорних ділянках, який відрізняється тим, що протилежно нахилені в кожній парі опор підкоси контактують з прогоновою будовою через рухомі шарніри і ці підкоси пов'язані один з одним поверх затяжками, а підкоси, нахилені назустріч один одному, в кожній парі опор прикріплені до прогонової будови через нерухомі шарніри, причому нижні кінці підкосів кожної опори пов'язані один з...
Візок і керований міст для вантажного автомобіля
Номер патенту: 25826
Опубліковано: 26.02.1999
Автор: Тімо Сало
МПК: B60G 9/00
Мітки: міст, керований, візок, вантажного, автомобіля
Формула / Реферат:
1. Тележка для грузового автомобиля, содержащая, по меньшей мере, два моста, по меньшей мере, один из которых выполнен управляемым, причем каждый из мостов включает жесткую ось с колесами, установленными в подшипниках на ее концах, опорные средства или рессоры, которые расположены у колес и соединены с жесткой осью с возможностью качания в вертикальной плоскости, и средства подвешивания рамы шасси автомобиля к опорным средствам или рессорам,...
Спосіб стабілізації положення рухомого елемента аеростатичної напрямної та пристрій для його здійснення
Номер патенту: 14905
Опубліковано: 04.03.1997
Автори: Зіненко Володимир Миколайович, Шепелев Анатолій Олександрович
МПК: F16C 32/06
Мітки: аеростатичної, пристрій, напрямної, стабілізації, елемента, рухомого, здійснення, положення, спосіб
Формула / Реферат:
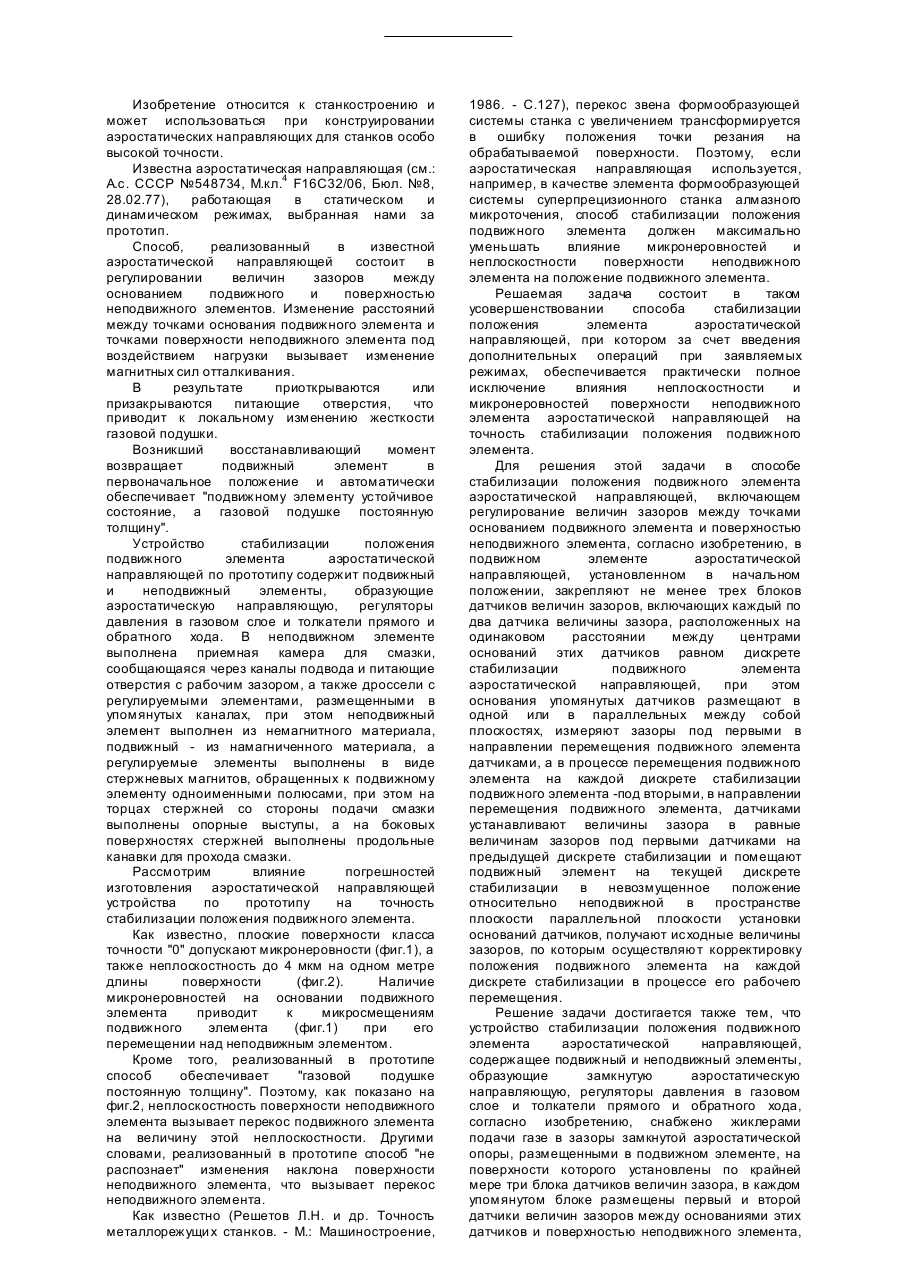
1. Способ стабилизации положения подвижного элемента аэростатической, направляющей, включающий регулирование величин зазоров между основанием подвижного элемента и поверхностью неподвижного элемента, отличающийся тем, что в подвижном элементе аэростатической направляющей, установленном в начальном положении, закрепляют не менее трех блоков датчиков величин зазоров, включающих каждый по два датчика величины зазора, расположенных на одинаковом...
Спосіб стабілізації положення рухомого елемента плоскої пружної опори та пристрій для його реалізації

Номер патенту: 41506
Опубліковано: 17.09.2001
Автори: Зіненко Володимир Миколайович, Шепелєв Анатолій Олександрович
МПК: F16C 32/06
Мітки: опори, елемента, положення, стабілізації, пружної, спосіб, реалізації, рухомого, плоскої, пристрій
Формула / Реферат:
1. Спосіб стабілізації положення рухомого елемента плоскої пружної опори, який включає регулювання величин зазорів між основами плоскої пружної опори і поверхнею рухомого елемента, який відрізняється тим, що в основі плоскої пружної опори встановлюють обмежену множину Q датчиків величин зазорів, основи яких розміщують у площині згаданої основи плоскої пружної опори, причому, датчики величин зазорів встановлюють по "n" лініям...
Спосіб термічної стабілізації газоподібного робочого тіла в процесі зміни його параметрів при контурній деформації (зміні об’єму)
Номер патенту: 47484
Опубліковано: 15.07.2002
Автор: Дологлонян Андрій Вартазарович
МПК: F04B 31/00, F02G 5/00, F02G 1/00, F01P 9/00, F01B 31/00
Мітки: робочого, стабілізації, деформації, зміни, тіла, газоподібного, параметрів, об'єму, контурній, термічної, спосіб, процесі
Формула / Реферат:
Спосіб термічної стабілізації газоподібного робочого тіла у процесі зміни його параметрів при контурній деформації (зміні об'єму) шляхом відводу (підведення) теплоти у процесі зміни об'єму, який відрізняється тим, що робоче тіло в процесі контурної деформації вилучають з робочого об'єму, пропускають через контур термічної стабілізації (систему охолодження або підігріву) і повертають знову до робочого об'єму.
Попередній патент: Збирач нафти і нафтопродуктів з акваторій
Наступний патент: Бетонна суміш
Випадковий патент: Олійний прес