Спосіб стабілізації положення рухомого елемента плоскої пружної опори та пристрій для його реалізації
Номер патенту: 41506
Опубліковано: 17.09.2001
Автори: Зіненко Володимир Миколайович, Шепелєв Анатолій Олександрович



Формула / Реферат
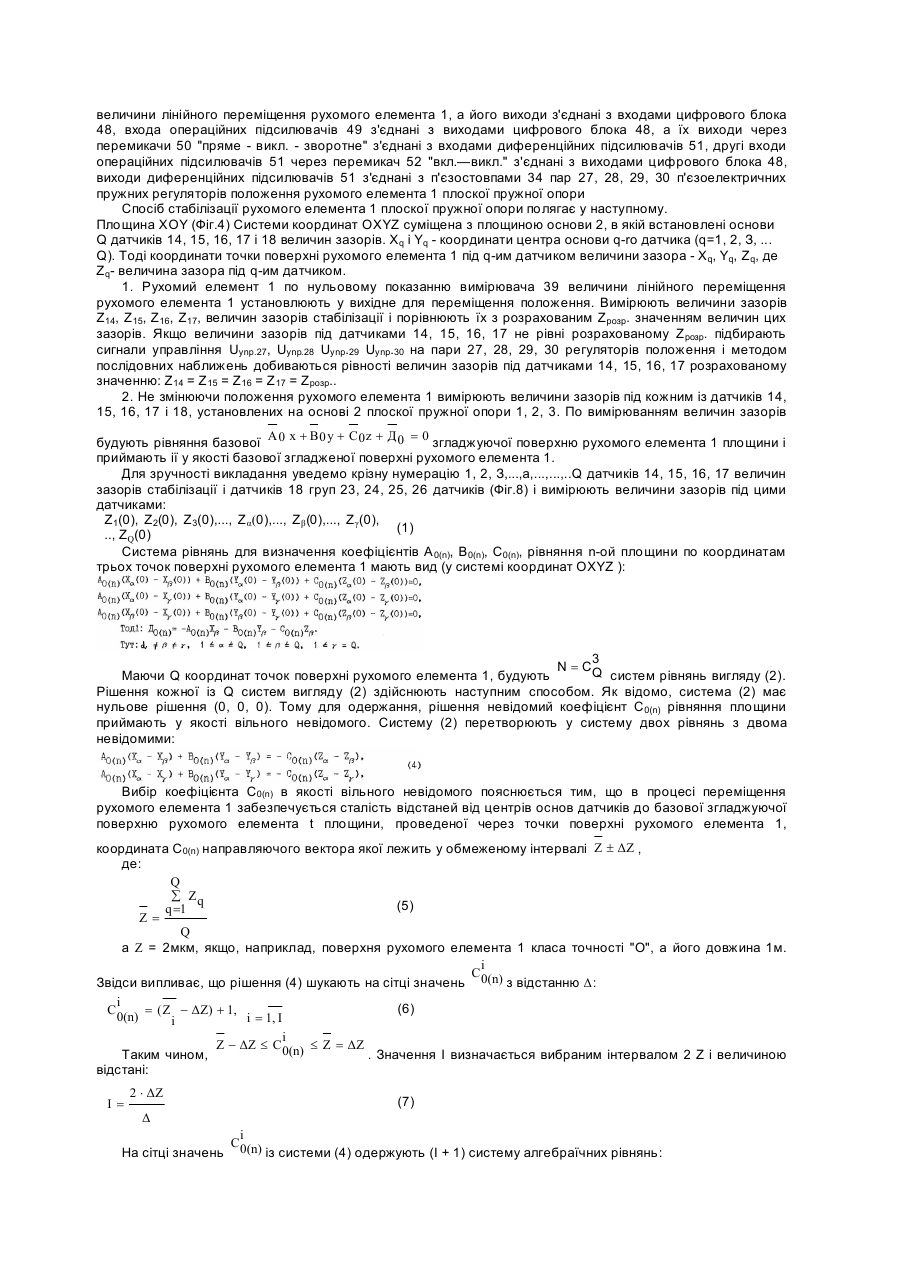
1. Спосіб стабілізації положення рухомого елемента плоскої пружної опори, який включає регулювання величин зазорів між основами плоскої пружної опори і поверхнею рухомого елемента, який відрізняється тим, що в основі плоскої пружної опори встановлюють обмежену множину Q датчиків величин зазорів, основи яких розміщують у площині згаданої основи плоскої пружної опори, причому, датчики величин зазорів встановлюють по "n" лініям датчиків величин зазорів, направлених перпендикулярно напрямку переміщення рухомого елемента, створюючи при цьому поле датчиків обмежене прямокутником, сторони якого проходять через центри основ крайніх датчиків ліній датчиків, а датчики, які розташовані по вершинам згаданого прямокутника, являються одночасно датчиками величин зазорів стабілізації, в початковому положенні рухомого елемента вимірюють зазори під Q датчиками поля датчиків їв системі координат OXYZ, площина XOY якої суміщена з площиною основи плоскої пружної опори, одержують координати Q точок поверхні рухомого елемента, по координатам Q точок поверхні рухомого елемента будують C3Q рівнянь площин, які проходять через три точки поверхні рухомого елемента, а по ним одержують рівняння базової згладжуючої поверхню рухомого елемента площини, в процесі переміщення рухомого елемента із вихідного положення на відстань (l-Dl) на кожній дискреті Dl стабілізації положення рухомого елемента вимірюють величини зазорів під (Q-κ) датчиками, встановленими на 2-їй, 3-ій,... n-ій по напрямку переміщення рухомого елемента лініях датчиків, по координатам (Q-κ) точок поверхні рухомого елемента одержують рівняння згладжуючої поверхню рухомого елемента площини, суміщують згладжуючу поверхню рухомого елемента площину з базовою згладжуючою поверхнею рухомого елемента площиною і встановлюють рухомий елемент на поточній дискреті стабілізації в незбурене положення відносно базової згладжуїчої поверхню рухомого елемента площини, одержують величини зазорів стабілізації, по яким здійснюють корекцію положення рухомого елемента на кожній дискреті стабілізації в процесі його переміщення із вихідного положення на відстань (l-Dl), на відстані (l-Dl) рухомого елемента відносно вихідного і при його незбуреному положенні відносно базової згладжуючої поверхню рухомого елемента площини вимірюють величини зазорів під Q датчиками поля датчиків, а по ним отримують рівняння згладжуючої поверхню рухомого елемента площини і перевіряють збіг цієї площини з базовою згладжуючою поверхню рухомого елемента площиною, і, якщо ці площини збігаються, при переміщенні рухомого елемента на відрізку (l-Dl)<l<(2l-Δl) на кожній дискреті стабілізації положення рухомого елемента вимірюють величини зазорів під (Q-κ) датчиками, встановленими на 2-ій, 3-ій, ... n-ій лініях датчиків, по координатам (Q-к) точок поверхні рухомого елемента отримують рівняння згладжуючої поверхню рухомого елемента площини, суміщують згладжуючу поверхню рухомого елемента площину з .базовою згладжуючою поверхню рухомого елемента площиною і встановлюють рухомий елемент на поточній дискреті стабілізації в незбурене положення відносно базової згладжуючої поверхню рухомого елемента площини, отримують величини зазорів стабілізації, по яким здійснюють корекцію рухомого елемента на кожній дискреті стабілізації в процесі його робочого переміщення на відрізку (l-Dl)<1<(2l-Dl), якщо згадані площини не збігаються, при переміщенні рухомого елемента на відрізку (l-Δl)<l<(2l-Dl) на кожній дискреті стабілізації положення рухомого елемента вимірюють величини зазорів під (Q-2k) датчиками, встановленими на 3-ій, ... n-ій лініях датчиків і рівняння згладжуючої поверхню рухомого елемента площини отримують по координатам (Q-κ) точок поверхні рухомого елемента, рухомий елемент переміщують по відрізках (2l-Dl)<l<(3l-Δl),...,[(n-3)l-Dl]<l<[(n-2)l-Dl], отримують величини зазорів стабілізації, по яким здійснюють корекцію положення рухомого елемента на кожній дискреті стабілізації в процесі його робочого переміщення на відрізках (2l-Dl)<l<(3l-Dl), ..., [n-3)l-Δl]<1<[(n-2)l-Δl], де: к - кількість датчиків величин зазорів, встановлених на одній лінії датчиків; n - число ліній датчиків; l - відстані між лініями датчиків; C3Q - число сполучень із Q по 3; Dl – відстань дискрета стабілізації рухомого елемента.
2. Пристрій стабілізації положення рухомого елемента плоскої пружної опори, який включає рухомий елемент плоскої пружної опори, основи плоскої пружної опори, рухомий елемент замикаючої плоскої пружної опори, жорстко з'єднаний з рухомим елементом плоскої пружної опори, основи замикаючої плоскої пружної опори, датчики величин зазорів, п'єзоелектричні пружні регулятори положення рухомого елемента плоскої пружної опори, блок стабілізації положення рухомого елемента плоскої пружної опори, який відрізняється тим. що він включає обмежену множину Q датчиків величин зазорів, встановлених на одній з основ плоскої пружної опори, причому, датчики величин зазорів встановлені не менше ніж на трьох лініях датчиків, спрямованих перпендикулярно напрямку переміщення рухомого елемента і створюють поле датчиків, обмежене прямокутником, сторони якого проведені через центри основ крайніх датчиків ліній датчиків, причому, датчики, які розташовані по вершинах згаданого прямокутника, являються одночасно датчиками величин зазорів стабілізації, а решта датчиків величин зазорів об'єднані в чотири групи датчиків величин зазорів, а їх основи суміщені з площиною основи плоскої пружної опори, п'єзоелектричні пружні регулятори положення рухомого елемента попарно і напроти один одного встановлені на обох основах плоскої пружної опори, причому, датчики величин зазорів стабілізації електрично через блок стабілізації положення рухомого елемента плоскої пружної опори зв'язані з відповідною парою п'єзоелектричних пружних регуляторів положення рухомого елемента, причому, датчики величин зазорів стабілізації і датчики величин зазорів першої групи датчиків, другої групи датчиків, третьої групи датчиків, четвертої групи датчиків величин зазорів з'єднані з входами комутаторів датчиків величин зазорів, відповідно, виходи комутаторів датчиків величин зазорів з'єднані з входами відповідних вимірювачів величин зазорів, а їх виходи з'єднані з входами цифрового блока і через перемикач "вкл. - викл." з'єднані з першими входами диференційних підсилювачів, відповідно, датчик величини лінійного переміщення рухомого елемента з'єднаний з входом вимірювача величини лінійного переміщення рухомого елемента, а його виходи з'єднані з входами цифрового блока, входи операційних підсилювачів з'єднані з входами цифрового блока, а їх виходи через перемикач "пряме - викл. - зворотне" з'єднані з входами диференційних підсилювачів, другі входи диференційних підсилювачів через перемикач "вкл. - викл." з'єднані з виходами цифрового блока, виходи диференційних підсилювачів з'єднані з п'єзостовпами пар п'єзоелектричних пружних регуляторів положення рухомого елемента плоскої пружної опори.
3. Пристрій за п. 2, який відрізняється тим, що кожна пара регуляторів положення рухомого елемента включає один п'єзоелектричний пружний регулятор положення рухомого елемента і один п'єзоелектричний регулятор положення рухомого елемента, який включає ролик, встановлений в корпусі ролика, п'єзостовп, встановлений між корпусом ролика і регулюючим гвинтом, укрученим в корпус п'єзоелектричного регулятора положення рухомого елемента.
4. Пристрій за п. 2, який відрізняється тим, що п'єзоелектричний пружний регулятор положення рухомого елемента включає ролик, розміщений в корпусі ролика, напрямну, пружину, встановлену між корпусом ролика і напрямною, а між напрямною ί регулюючим гвинтом, укрученим в корпус п'єзоелектричного пружного регулятора положення рухомого елемента, встановлений п'єзостовп.
Текст
Винахід відносіться до верстатобудування і може бути використаний при конструюванні, наприклад, прецизійних шліфувальних верстатів для точного переміщення заготовки в площині шліфування. Відомий пристрій стабілізації положення рухомого елемента плоскої аеростатичної опори, розкритий у патенті України № 17152 М.кл. 5 F16СЗ2/06 від 189.03.1997p., який є найбільш близьким по технічній суті до технічного рішення, що заявляється. Його суть полягає в наступному. Рухомий елемент 1 (Фіг, 1) переміщується між основами 2 і 3 плоскої опори 1, 2, 3, причому, положення рухомого елемента 1 стабілізується відносно нерухомої в просторі площини “Р” (фіг.1) у тому смислі, що в процесі переміщення рухомого елемента 1 відстань від будь-яких трьох точок рухомого елемента до площини "Р" залишаються незмінними. В основі 3 плоскої опори встановлено (Фіг.1, Фіг.2) не менш трьох, а у даному прикладі реалізації способа-прототипа - чотири блока 53 датчиків величин зазорів. Кожний блок датчиків (Фіг.3) включає перший датчик 54 (по напрямку переміщення ) величини зазора і другий датчик 55 величини зазора. Таким чином, вимірюються величини зазорів між основами датчиків і зверненою до них поверхнею рухомого елемента 1. Основи перших і других датчиків 54 і 55 усіх блоків датчиків лежать в одній площині, паралельній площині "Р". Відстані між центрами основ датчиків 54 і 55 у кожному блоку датчиків рівні між собою і рівні дискретні стабілізації “l”. Зафіксуємо положення рухомого елемента 1 і приймемо це положення у якості вихідного для переміщення рухомого елемента 1 вуказанному на Фіг.1 напрямку. i Z У вихідному положенні рухомого елемента 1 вимірюють величини зазорів 2 під другими датчиками 55 i Z 0 кожного і-го блока датчиків і запам'ятовують їх у якості опорних 2on зазорів (і = 1, 2, 3, 4 . у даному прикладі). Нехай такої відстані від точок Аі поверхні рухомого елемента 1, розташованих над центрами основ других датчиків 55 кожного і-го блока датчиків до нерухомої площини “Р” відповідно рівні аі (0), (і = 1, 2, 3, 4). Переміщують рухомий елемент управо (Фіг. 1) на відстань, рівну дискреті стабілізації “l”. У загальному випадку рухомий елемент 1 після переміщення на відстань “l” займе відносно основ датчиків 54 і 55 випадкове положення. Змішують рухомий елемент 1 висоті зазора і встановлюють під першими датчиками величин зазорів l Z 0 зазори, рівні відповідним ± величинам опорних зазорів 2on : 1 l 2 2 3 3 4 4 0 Z1 1 Z 0 Z1 1 Z 0 Z1 1 Z 0 Z2 1 Z = 2on = 2on , = 2on , . = 2on , Так як після переміщення рухомого елемента 1 з вихідного положення на відстань "l” точки Аi (I = 1, 2, 3, 4) (Фіг.1) рухомого елемента 1 розташувались над центрами основ перших датчиків 54, після установлення під першими датчиками 54 величин зазорів, рівних величинам відповідних опорних зазорів, відстані аі(1) від цих точок до базової поверхні “Р” будуть рівні відповідним відстаням аі(0) від цих точок до площини “Р” у вихідному положенні рухомого елемента 1 а1(1) = a1(0), a2(1) = а2(0), а3(1) = а3(0), а4(1) = а4 (0). Отже, після переміщення рухомого елемента 1 на відстань "l" і виконання описаних дій відстані від точок А 1, А2, А3 А4, до базової площини не змінилися. Тому не змінилося і положення рухомого елемента 1 відносно нерухомої площини “Р”. Після першого переміщення рухомого елемента 1 на відстань “l” і установлення під першими датчиками l 2 3 4 Z 1 Z 1 Z 1 Z 1 величин зазорів, рівних опорним, вимірюють величини зазорів 2 , 2 , 2 , 2 під другими l 2 3 4 Z 2on 1 Z 2on 1 Z 2on 1 Z 2on 1 , , , для датчиками І запам'ятовують їх у якості опорних зазорів установлення рухомого елемента 1 у незбурене положення після його другого переміщення на відстань "l". Описану процедуру з дискретністю "l" виконують до переміщення рухомого елемента 1 на задану l 2 3 4 l 2 Z 0 Z 2on 0 Z 2on 0 Z 2on 0 Z 1 Z 1 відстань “L”. Одержують масив опорних зазорів [ 2on , , , ], [ 2on , 2on , () () () () () () () () () () () () () () () () () () () () () () () () æ Lö çJ ³ ÷ 3 4 l 2 3 4 Z 2on 1 Z 2on 1 Z J Z 2on J Z 2on J Z 2on J l ø , відповідаючих незбуреному , ],….[ 2on , , , ], è положенню рухомого елемента 1 на дискретах стабілізації j*l (j = 0, 1,…,J). У процесі стабілізації рухомого елемента 1 на кожній j-ий декреті стабілізації порівнюють поточні l 2 3 4 Z t Z t Z t Z t значення величин зазорів під другими датчиками 2 , 2 , 2 , 2 з величинами відповідних l 2 3 4 Z j - 1 Z2on j - 1 Z2on j - 1 Z2on j - 1 опорних зазорів 2on , , , для j-ої дискрети стабілізації При відхиленні згаданих поточних значень величин зазорів під другими датчиками від відповідних () () () () () () () ( ) ( ) ( ) () ( ) () () опорних змінюють положення рухомого елемента 1 так, щоб неузгодження æ Zi - Zi (t) ö ® 0 ç 2on ÷ 2 ø è , а отже запобігають зміщення рухомого елемента 1 відносно площини "Р". Вадами стабілізації положення рухомого елемента 1 по способу опорних зазорів пристроєм є те, що: 1. Похибка стабілізації положення рухомого елемента 1 залежить від величини “l” дискреті стабілізації і на j-ій дискреті стабілізації визначається величинами різниць опорних зазорів на суміжних дискретах i i Z Z стабілізації: 2on - 2on . Причому, величина дискрети “l” дорівнює відстані між центрами основ датчиків (Фіг.2) і тому завжди l > ДД , де ДД - діаметр основи датчика величини зазора. 2. Реалізація способа опорних зазорів вимагає установлення основ датчиків в площині, паралельної площині "Р" з особливо високою точністю. В противному разі на кожній відстані переміщення рухомого елемента похибка його положення відносно нерухомої площини “Р” (відхилення точок Аі від площини "Р" ) буде зростати на величину похибки встановлення основи датчика величини зазора відносно площини установлення датчиків. В основу винаходу поставлена задача такого удосконалення способа стабілізації положення рухомого елемента, при якому стабілізація рухомого елемента може здійснюватися зі скіль завгодно малою дискретою стабілізації, мінімальне значення якої обмежується тільки чутливістю вимірювача величини переміщення рухомого елемента плоскої пружної опори, а похибка установлення основ датчиків величин зазорів не приводить до суттєвого збільшення похибки стабілізації рухомого елемента та її накопиченню. Рішення цієї задачі досягається тим, що в способі стабілізації положення елемента плоскої пружної опори, який включає регулювання величин зазорів між основами плоскої пружної опори і поверхнею рухомого елемента, згідно винаходу, в основі плоскої пружної опори встановлюють обмежену множину Q датчиків величин зазорів, основи яких розміщують у площині згаданої основи плоскої пружної опори, причому, датчики величин зазорів встановлюють по "n" лініям датчиків величин зазорів, направлених перпендикулярно напрямку переміщення рухомого елемента, створюючи при цьому поле датчиків обмежене прямокутником, сторони якого проходять через центри основ крайніх датчиків ліній датчиків, а датчики, які розташовані по вершинам згаданого прямокутника, являються одночасно датчиками величин узорів стабілізації, в початковому положенні рухомого елемента вимірюють зазори під Q датчиками поля датчиків і в системі координат OXYZ, площина XOY якої суміщена з площиною основи плоскої пружної опори, одержують координати Q точок поверхні рухомого елемента, по координатам Q точок поверхні 3 CQ рухомого елемента будують рівнянь площин, які проходять через три точки поверхні рухомого елемента, а по ним одержують рівняння базової згладжуваючої поверхню рухомого елемента площини, в процесі переміщення рухомого елемента із вихідного положення на відстань (l - Δl) на кожній дискреті Δl стабілізації положення рухомого елемента вимірюють величини зазорів під (Q - к) датчиками, встановленими на 2-ій, 3-ій,...n-ій по напрямку переміщення рухомого елемента лініях датчиків, по координатам (Q - к) точок поверхні рухомого елемента одержують рівняння сгладжуваючої поверхню рухомого елемента площини, суміщають згладжуваючу поверхню рухомого елемента площину з базовою згладжуваючої поверхню рухомого елемента площиною і встановлюють рухомий елемент на поточній дискреті стабілізації в незбурене положення відносно базової згладжувачої поверхню рухомого елемента площини, одержують величини зазорів стабілізації, по яким здійснюють корекцію положення рухомого елемента на кожній дискреті стабілізації в процесі його переміщення із вихідного положення на відстань (lΔl), на відстані (l - Δl) рухомого елемента відносно вихідного і при його незбуреному положенні відносно базової згладжуваючої поверхню рухомого елемента площини вимірюють величини зазорів під Q датчиками поля датчиків, а по ним отримують рівняння згладжуваючої поверхню рухомого елемента площини і перевіряють збіг цієї площини з базовою згладжуваючою поверхню рухомого елемента площиною, і якщо ці площини збігаються, при переміщенні рухомого елемента на відрізку (l - Δl) < l
ДивитисяДодаткова інформація
Автори англійськоюShepeliev Anatolii Oleksandrovych, Zinenko Volodymyr Mykolaiovych
Автори російськоюШепелев Анатолий Александрович, Зиненко Владимир Николаевич
МПК / Мітки
МПК: F16C 32/06
Мітки: стабілізації, пружної, рухомого, пристрій, положення, спосіб, реалізації, опори, елемента, плоскої
Код посилання
<a href="https://ua.patents.su/19-41506-sposib-stabilizaci-polozhennya-rukhomogo-elementa-plosko-pruzhno-opori-ta-pristrijj-dlya-jjogo-realizaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб стабілізації положення рухомого елемента плоскої пружної опори та пристрій для його реалізації</a>
Пристрій стабілізації положення рухомого елемента плоскої аеростатичної опори
Номер патенту: 17152
Опубліковано: 18.03.1997
Автори: Шепелев Анатолій Олександрович, Зіненко Володимир Миколайович
МПК: F16C 32/06
Мітки: аеростатичної, пристрій, стабілізації, рухомого, елемента, плоскої, опори, положення
Формула / Реферат:
Устройство стабилизации положения подвижного элемента плоской аэростатической опоры, включающей подвижный и неподвижный элементы плоской аэростатической опоры и регуляторы положения подвижного элемента плоской аэростатической опоры, отличающееся тем, что неподвижный элемент плоской аэростатической опоры состоит из двух оснований со встроенными в них жиклерами подачи газа в зазоре между этими основаниями и размещенным между ними подвиж-ным...
Спосіб стабілізації положення рухомого елемента аеростатичної напрямної та пристрій для його здійснення
Номер патенту: 14905
Опубліковано: 04.03.1997
Автори: Шепелев Анатолій Олександрович, Зіненко Володимир Миколайович
МПК: F16C 32/06
Мітки: здійснення, положення, пристрій, аеростатичної, елемента, рухомого, стабілізації, напрямної, спосіб
Формула / Реферат:
1. Способ стабилизации положения подвижного элемента аэростатической, направляющей, включающий регулирование величин зазоров между основанием подвижного элемента и поверхностью неподвижного элемента, отличающийся тем, что в подвижном элементе аэростатической направляющей, установленном в начальном положении, закрепляют не менее трех блоков датчиков величин зазоров, включающих каждый по два датчика величины зазора, расположенных на одинаковом...
Пристрій компенсації гіроскопічного моменту обертового елемента, наприклад, вала аеростатичної шпиндельної опори
Номер патенту: 25540
Опубліковано: 30.10.1998
Автори: Зіненко Володимир Миколайович, Шепелев Анатолій Олександрович
МПК: F16C 32/06
Мітки: обертового, компенсації, моменту, пристрій, опори, аеростатичної, елемента, шпиндельної, вала, наприклад, гіроскопічного
Формула / Реферат:
1. Устройство компенсации гироскопического момента вращающегося элемента, например, вала аэростатической шпиндельной опоры, содержащее датчики величины смещения оси вращающегося элемента по оси "X" и по оси "Y", измерители величины смещения оси вращения вращающегося элемента по оси "X" и по оси "Y", объединенные в группы по меньшей мере из двух, регуляторы давления, образующие компенсаторы смещения оси...
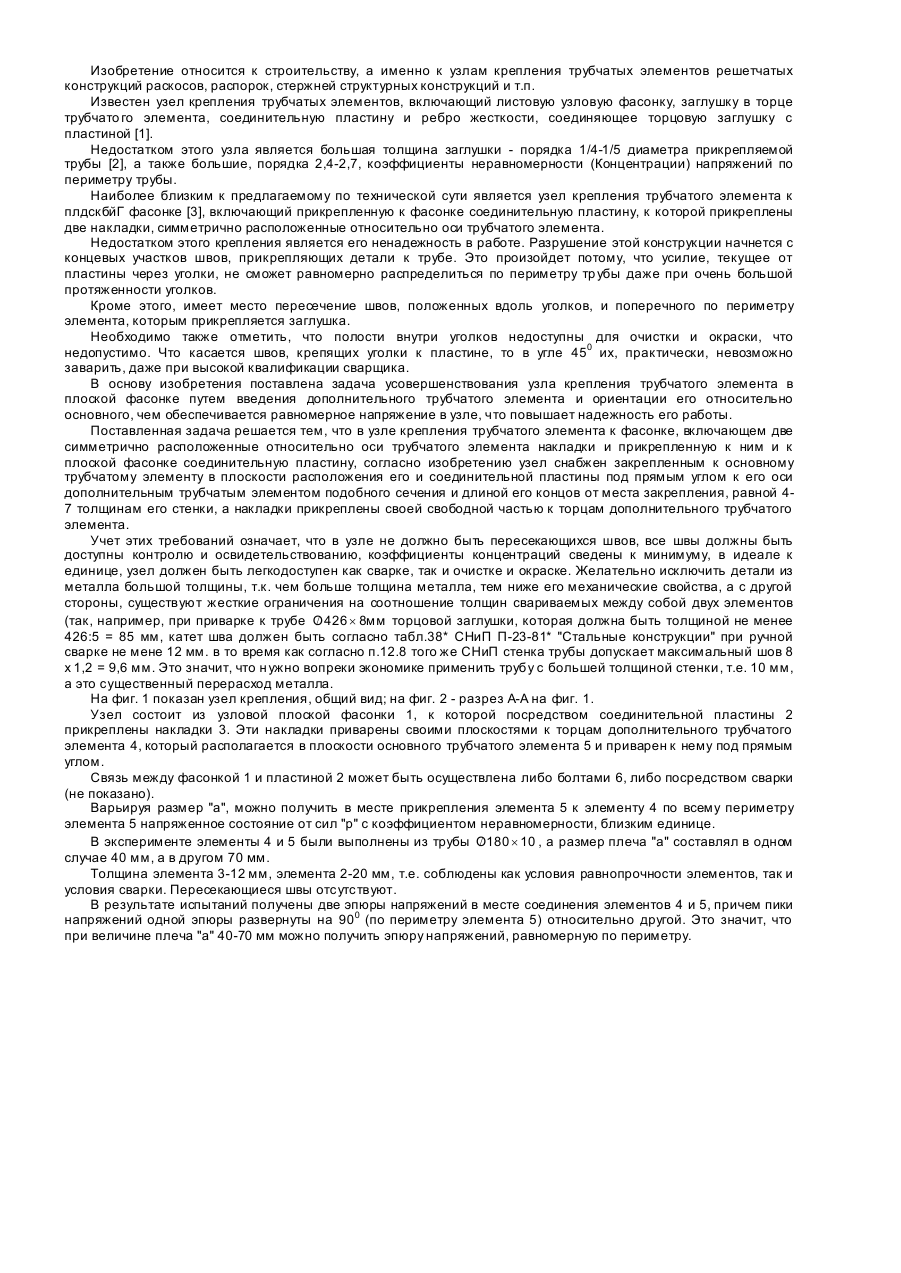
Вузол кріплення трубчастого елемента до плоскої фасонки
Номер патенту: 2737
Опубліковано: 26.12.1994
Автор: Барик Ярослав Сільвестрович
МПК: E04B 1/58
Мітки: плоскої, трубчастого, кріплення, фасонки, вузол, елемента
Формула / Реферат:
Узел крепления трубчатого элемента к плоской фасонке, включающий две симметрично расположенные относительно оси трубчатого элемента накладки и прикрепленную к ним и к плоской фасонке соединительную пластинку, отличающийся тем, что он снабжен закрепленным к основному трубчатому элементу в плоскости его расположения и под прямым углом к его оси дополнительным трубчатым элементом подобного сечения и длиной его концов от места закрепления, равной...
Спосіб визначення положення осі обертання ротора

Номер патенту: 29303
Опубліковано: 16.10.2000
Автор: Сокол Володимир Моріцевич
Мітки: положення, обертання, визначення, осі, спосіб, ротора
Формула / Реферат:
Спосіб визначення положення осі обертання ротора, який полягає в тому, що вимірювання виконують датчиками, розташованими в площинах, які перетинають вісь симетрії ротора, який відрізняється тим, що в кожній площині розташовують не менше як по три датчики, якими вимірюють одночасно лінійні швидкості V1, V2 і V3 в протистоячих датчикам точках на поверхні ротора при одночасному вимірюванні відстаней S1, S2 і S3 від датчиків до цих точок,...
Попередній патент: Спосіб лікування гнійно-некротичних процесів при діабетичних ангіопатіях
Наступний патент: Різальний диск з гвинтовою канавкою
Випадковий патент: Спосіб утилізації відпрацьованих сірчанокислотних розчинів гальванічних виробництв