Спосіб зниження динамічних навантажень в насосному комплексі з керованою арматурою
Номер патенту: 52073
Опубліковано: 10.08.2010
Автори: Коренькова Тетяна Валеріївна, Кравець Олексій Михайлович, Родькін Дмитро Йосипович

Формула / Реферат
1. Спосіб зниження динамічних навантажень в насосному комплексі з керованою арматурою, що полягає у формуванні нерівномірного темпу закриття запірно-регулюючої засувки за допомогою нерегульованого асинхронного електроприводу з кількома швидкостями обертання, який відрізняється тим, що до нерегульованого асинхронного електропривода засувки додатково підключають перетворювач частоти і зовнішнє джерело резервного живлення, при раптовому припиненні електропостачання насосного комплексу, що фіксується датчиком напруги, і зворотному русі рідини в напірному трубопроводі, який фіксується першим датчиком витрати, формують сигнал керування на силовий перемикач для підключення перетворювача частоти до джерела безперервного живлення, фіксують значення напору ![]() і витрати
і витрати ![]() у трубопроводі за допомогою першого датчика напору і першого датчика витрати відповідно, обчислюють величину швидкості зворотного потоку
у трубопроводі за допомогою першого датчика напору і першого датчика витрати відповідно, обчислюють величину швидкості зворотного потоку ![]() , фазу гідроудару
, фазу гідроудару ![]() , підвищення тиску при прямому гідроударі
, підвищення тиску при прямому гідроударі ![]() , визначають відносне підвищення напору в трубопроводі для початкових значень
, визначають відносне підвищення напору в трубопроводі для початкових значень ![]() у відповідності з залежністю:
у відповідності з залежністю:
![]() ,
,
де ![]() ,
, ![]() - коефіцієнти апроксимації, що визначаються за кривими підвищення напору при різних темпах і часу закриття арматури, швидкості течії рідини в трубопроводі;
- коефіцієнти апроксимації, що визначаються за кривими підвищення напору при різних темпах і часу закриття арматури, швидкості течії рідини в трубопроводі;
![]() - відносний час закриття арматури, кратний фазі гідроудару
- відносний час закриття арматури, кратний фазі гідроудару ![]() ;
;
![]() - коефіцієнт інтенсивності закриття арматури;
- коефіцієнт інтенсивності закриття арматури;
![]() - початкова швидкість течії рідини в трубопроводі до закриття арматури,
- початкова швидкість течії рідини в трубопроводі до закриття арматури,
розраховують фактичне підвищення напору в трубопроводі ![]() , при умові
, при умові ![]() , де
, де ![]() - максимально припустиме підвищення тиску в трубопроводі, визначають оптимальні значення часу закриття
- максимально припустиме підвищення тиску в трубопроводі, визначають оптимальні значення часу закриття ![]() і коефіцієнта інтенсивності закриття
і коефіцієнта інтенсивності закриття ![]() запірно-регулюючої арматури, формують сигнал керування для зміни положення робочого органа запірно-регулюючої арматури у відповідності з залежністю
запірно-регулюючої арматури, формують сигнал керування для зміни положення робочого органа запірно-регулюючої арматури у відповідності з залежністю ![]() , контролюють
, контролюють ![]() , що фіксується датчиком положення, до повного закриття засувки; при умові
, що фіксується датчиком положення, до повного закриття засувки; при умові ![]() обчислюють відносне підвищення напору
обчислюють відносне підвищення напору ![]() для наступних значень
для наступних значень ![]() і
і ![]() до отримання
до отримання ![]() і
і ![]() .
.
2. Спосіб за п. 1, який відрізняється тим, що в обвідному трубопроводі паралельно запірно-регулюючій засувці і відцентровому насосу встановлюють гідроклапан, активний гасник енергії гідропотоку із електричним генератором на одному валу, другим датчиком напору і другим датчиком витрати на вході, при раптовому зникненні електропостачання насосного комплексу, формують сигнал керування на відкриття гідроклапана, причому частину потоку по обвідному трубопроводу направляють на активний гасник енергії, що обертає електричний генератор, фіксують величину напору ![]() і витрати
і витрати ![]() у обвідному трубопроводі за допомогою другого датчика напору і другого датчика витрати відповідно, обчислюють вихідну потужність генератора
у обвідному трубопроводі за допомогою другого датчика напору і другого датчика витрати відповідно, обчислюють вихідну потужність генератора
![]() ,
,
де ![]() - щільність рідини;
- щільність рідини;
![]() - прискорення вільного падіння;
- прискорення вільного падіння;
![]() - напір на вході активного гасника енергії в обвідному трубопроводі;
- напір на вході активного гасника енергії в обвідному трубопроводі;
![]() - витрата при зворотному потоці рідини в обвідному трубопроводі;
- витрата при зворотному потоці рідини в обвідному трубопроводі;
![]() - коефіцієнт корисної дії активного гасника енергії;
- коефіцієнт корисної дії активного гасника енергії;
![]() - коефіцієнт корисної дії електричного генератора,
- коефіцієнт корисної дії електричного генератора,
яку порівнюють з величиною встановленої потужності ![]() перетворювача частоти; при виконанні умови
перетворювача частоти; при виконанні умови ![]() формують сигнал керування на силовий перемикач для підключення вихідних затискачів генератора до входу перетворювача частоти.
формують сигнал керування на силовий перемикач для підключення вихідних затискачів генератора до входу перетворювача частоти.
Текст
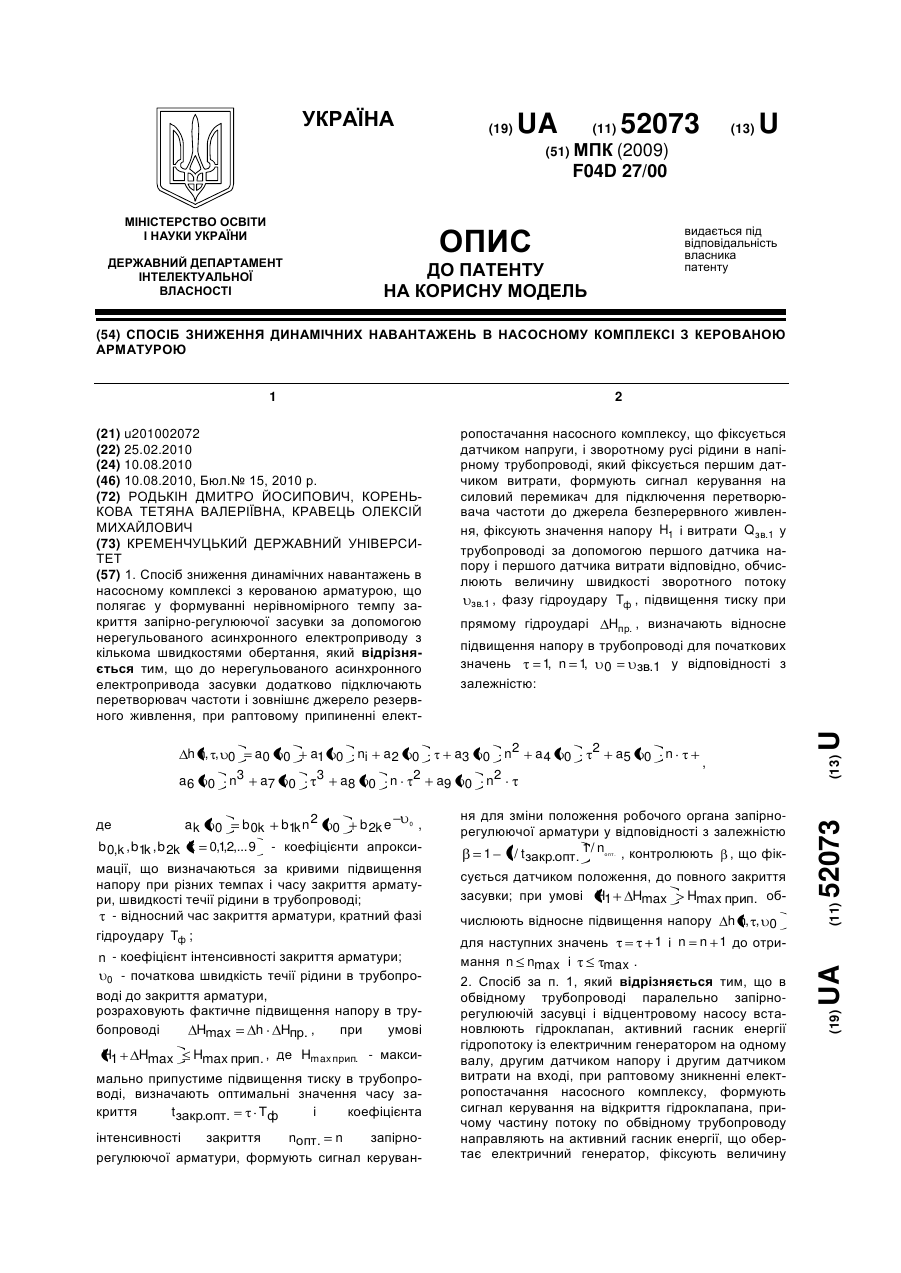
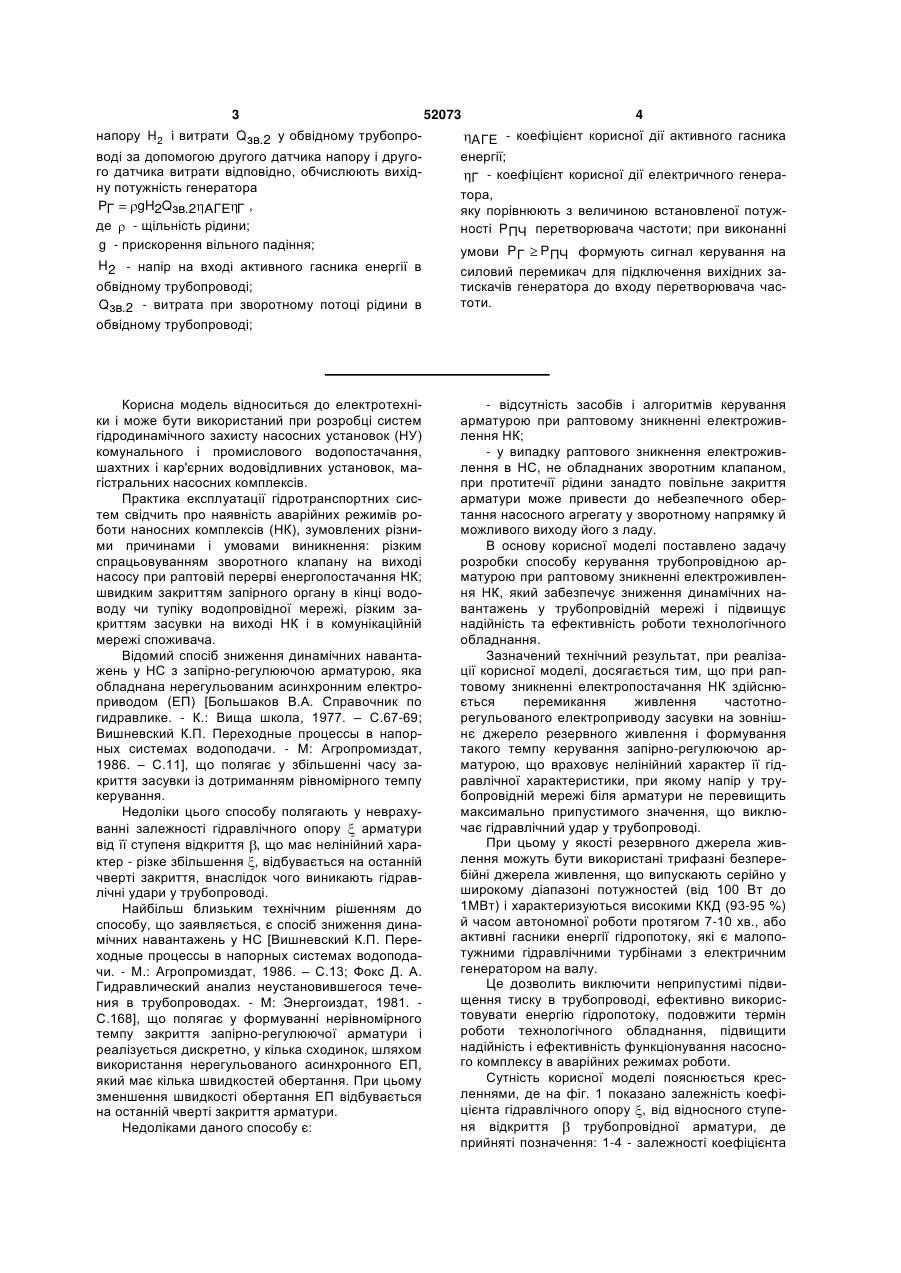
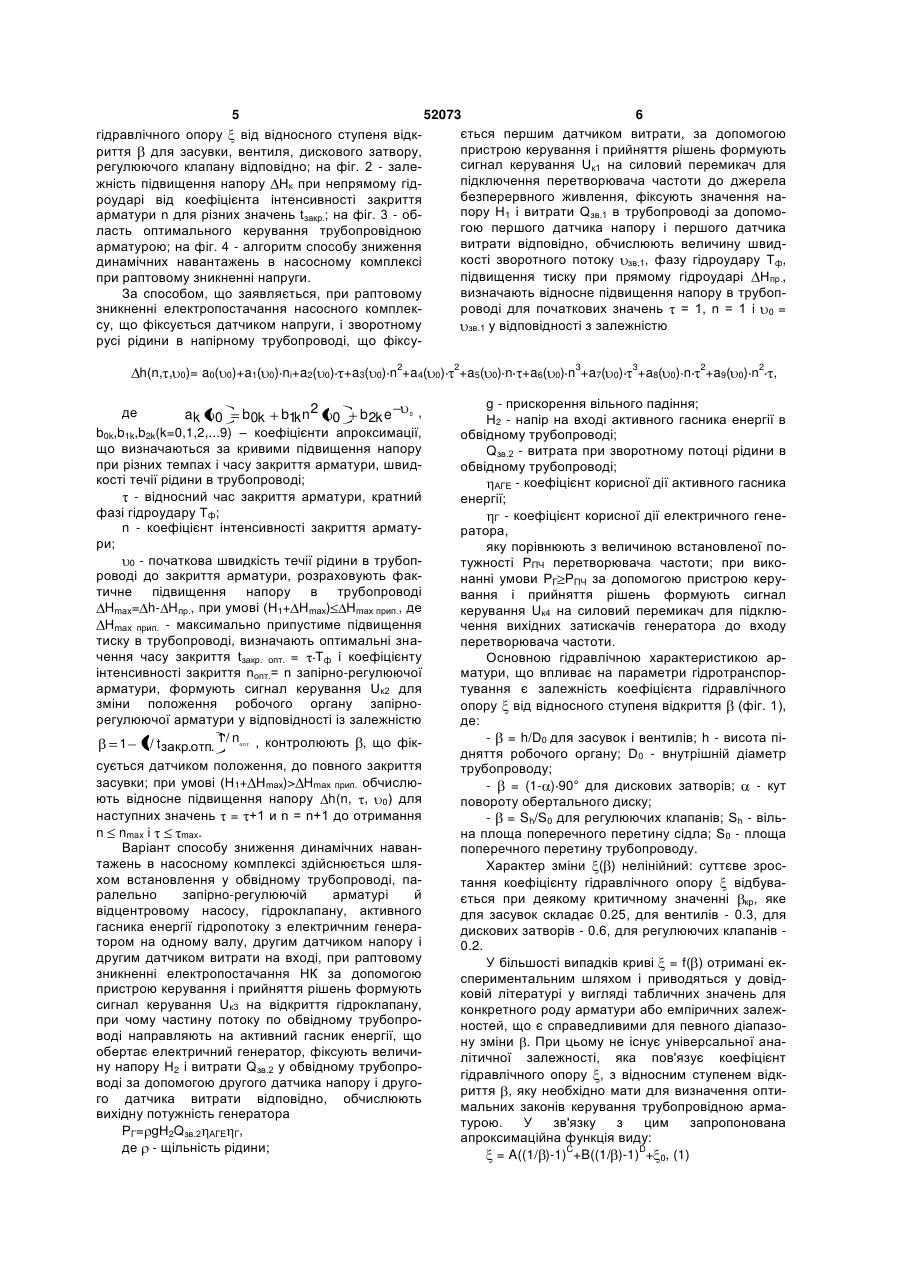
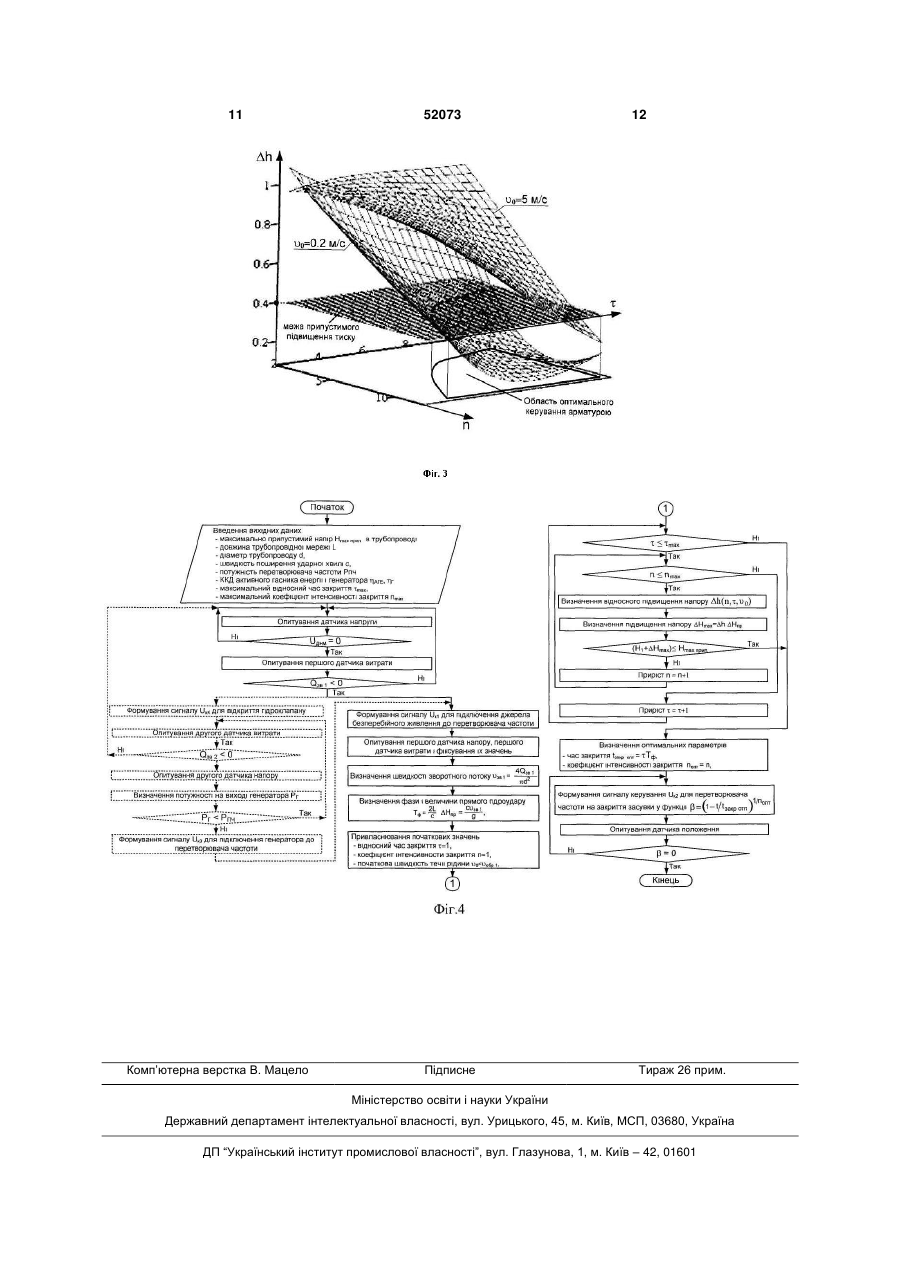
1. Спосіб зниження динамічних навантажень в насосному комплексі з керованою арматурою, що полягає у формуванні нерівномірного темпу закриття запірно-регулюючої засувки за допомогою нерегульованого асинхронного електроприводу з кількома швидкостями обертання, який відрізняється тим, що до нерегульованого асинхронного електропривода засувки додатково підключають перетворювач частоти і зовнішнє джерело резервного живлення, при раптовому припиненні елект 3 напору H2 і витрати Qзв.2 у обвідному трубопроводі за допомогою другого датчика напору і другого датчика витрати відповідно, обчислюють вихідну потужність генератора РГ gH2Qзв.2 АГЕ Г , де - щільність рідини; g - прискорення вільного падіння; H2 - напір на вході активного гасника енергії в обвідному трубопроводі; Qзв.2 - витрата при зворотному потоці рідини в обвідному трубопроводі; Корисна модель відноситься до електротехніки і може бути використаний при розробці систем гідродинамічного захисту насосних установок (НУ) комунального і промислового водопостачання, шахтних і кар'єрних водовідливних установок, магістральних насосних комплексів. Практика експлуатації гідротранспортних систем свідчить про наявність аварійних режимів роботи наносних комплексів (НК), зумовлених різними причинами і умовами виникнення: різким спрацьовуванням зворотного клапану на виході насосу при раптовій перерві енергопостачання НК; швидким закриттям запірного органу в кінці водоводу чи тупіку водопровідної мережі, різким закриттям засувки на виході НК і в комунікаційній мережі споживача. Відомий спосіб зниження динамічних навантажень у НС з запірно-регулюючою арматурою, яка обладнана нерегульованим асинхронним електроприводом (ЕП) [Большаков В.А. Справочник по гидравлике. - К.: Вища школа, 1977. – С.67-69; Вишневский К.П. Переходные процессы в напорных системах водоподачи. - М: Агропромиздат, 1986. – С.11], що полягає у збільшенні часу закриття засувки із дотриманням рівномірного темпу керування. Недоліки цього способу полягають у неврахуванні залежності гідравлічного опору арматури від її ступеня відкриття , що має нелінійний характер - різке збільшення , відбувається на останній чверті закриття, внаслідок чого виникають гідравлічні удари у трубопроводі. Найбільш близьким технічним рішенням до способу, що заявляється, є спосіб зниження динамічних навантажень у НС [Вишневский К.П. Переходные процессы в напорных системах водоподачи. - М.: Агропромиздат, 1986. – С.13; Фокс Д. А. Гидравлический анализ неустановившегося течения в трубопроводах. - М: Энергоиздат, 1981. С.168], що полягає у формуванні нерівномірного темпу закриття запірно-регулюючої арматури і реалізується дискретно, у кілька сходинок, шляхом використання нерегульованого асинхронного ЕП, який має кілька швидкостей обертання. При цьому зменшення швидкості обертання ЕП відбувається на останній чверті закриття арматури. Недоліками даного способу є: 52073 4 АГЕ - коефіцієнт корисної дії активного гасника енергії; Г - коефіцієнт корисної дії електричного генератора, яку порівнюють з величиною встановленої потужності Р ПЧ перетворювача частоти; при виконанні умови Р Г Р ПЧ формують сигнал керування на силовий перемикач для підключення вихідних затискачів генератора до входу перетворювача частоти. - відсутність засобів і алгоритмів керування арматурою при раптовому зникненні електроживлення НК; - у випадку раптового зникнення електроживлення в НС, не обладнаних зворотним клапаном, при протитечії рідини занадто повільне закриття арматури може привести до небезпечного обертання насосного агрегату у зворотному напрямку й можливого виходу його з ладу. В основу корисної моделі поставлено задачу розробки способу керування трубопровідною арматурою при раптовому зникненні електроживлення НК, який забезпечує зниження динамічних навантажень у трубопровідній мережі і підвищує надійність та ефективність роботи технологічного обладнання. Зазначений технічний результат, при реалізації корисної моделі, досягається тим, що при раптовому зникненні електропостачання НК здійснюється перемикання живлення частотнорегульованого електроприводу засувки на зовнішнє джерело резервного живлення і формування такого темпу керування запірно-регулюючою арматурою, що враховує нелінійний характер її гідравлічної характеристики, при якому напір у трубопровідній мережі біля арматури не перевищить максимально припустимого значення, що виключає гідравлічний удар у трубопроводі. При цьому у якості резервного джерела живлення можуть бути використані трифазні безперебійні джерела живлення, що випускають серійно у широкому діапазоні потужностей (від 100 Вт до 1МВт) і характеризуються високими ККД (93-95 %) й часом автономної роботи протягом 7-10 хв., або активні гасники енергії гідропотоку, які є малопотужними гідравлічними турбінами з електричним генератором на валу. Це дозволить виключити неприпустимі підвищення тиску в трубопроводі, ефективно використовувати енергію гідропотоку, подовжити термін роботи технологічного обладнання, підвищити надійність і ефективність функціонування насосного комплексу в аварійних режимах роботи. Сутність корисної моделі пояснюється кресленнями, де на фіг. 1 показано залежність коефіцієнта гідравлічного опору , від відносного ступеня відкриття трубопровідної арматури, де прийняті позначення: 1-4 - залежності коефіцієнта 5 52073 6 ється першим датчиком витрати, за допомогою гідравлічного опору від відносного ступеня відкпристрою керування і прийняття рішень формують риття для засувки, вентиля, дискового затвору, сигнал керування Uк1 на силовий перемикач для регулюючого клапану відповідно; на фіг. 2 - залепідключення перетворювача частоти до джерела жність підвищення напору Нк при непрямому гідбезперервного живлення, фіксують значення нароударі від коефіцієнта інтенсивності закриття пору Н1 і витрати Qзв.1 в трубопроводі за допомоарматури n для різних значень tзaкр.; на фіг. 3 - обгою першого датчика напору і першого датчика ласть оптимального керування трубопровідною витрати відповідно, обчислюють величину швидарматурою; на фіг. 4 - алгоритм способу зниження кості зворотного потоку зв.1, фазу гідроудару Тф, динамічних навантажень в насосному комплексі підвищення тиску при прямому гідроударі Нпр., при раптовому зникненні напруги. визначають відносне підвищення напору в трубопЗа способом, що заявляється, при раптовому роводі для початкових значень = 1, n = 1 і 0 = зникненні електропостачання насосного комплексу, що фіксується датчиком напруги, і зворотному зв.1 у відповідності з залежністю русі рідини в напірному трубопроводі, що фіксуh(n, , 0)= a0( 0)+a1( 0) ni+a2( 0) +a3( 0) n2+a4( 0) де a k 0 b 0k b1k n 2 0 b 2k e 0 , b0k,b1k,b2k(k=0,1,2,...9) – коефіцієнти апроксимації, що визначаються за кривими підвищення напору при різних темпах і часу закриття арматури, швидкості течії рідини в трубопроводі; - відносний час закриття арматури, кратний фазі гідроудару Тф; n - коефіцієнт інтенсивності закриття арматури; 0 - початкова швидкість течії рідини в трубопроводі до закриття арматури, розраховують фактичне підвищення напору в трубопроводі Hmax= h- Hпp., при умові (Н1+ Нmах) Нmах прип., де Нmах прип. - максимально припустиме підвищення тиску в трубопроводі, визначають оптимальні значення часу закриття tзaкp. опт. = Тф і коефіцієнту інтенсивності закриття nопт.= n запірно-регулюючої арматури, формують сигнал керування Uк2 для зміни положення робочого органу запірнорегулюючої арматури у відповідності із залежністю 1 t / t закр.отп. 1 / nопт. , контролюють , що фіксується датчиком положення, до повного закриття засувки; при умові (Н1+ Нmах)> Нmах прип. обчислюють відносне підвищення напору h(n, , 0) для наступних значень = +1 и n = n+1 до отримання n nmax i max. Варіант способу зниження динамічних навантажень в насосному комплексі здійснюється шляхом встановлення у обвідному трубопроводі, паралельно запірно-регулюючій арматурі й відцентровому насосу, гідроклапану, активного гасника енергії гідропотоку з електричним генератором на одному валу, другим датчиком напору і другим датчиком витрати на вході, при раптовому зникненні електропостачання НК за допомогою пристрою керування і прийняття рішень формують сигнал керування Uк3 на відкриття гідроклапану, при чому частину потоку по обвідному трубопроводі направляють на активний гасник енергії, що обертає електричний генератор, фіксують величину напору Н2 і витрати Qзв.2 у обвідному трубопроводі за допомогою другого датчика напору і другого датчика витрати відповідно, обчислюють вихідну потужність генератора РГ= gН2Qзв.2 АГЕ Г, де - щільність рідини; 2 +a5( 0) n +a6( 0) n3+a7( 0) 3 +a8( 0) n 2 +a9( 0) n2 , g - прискорення вільного падіння; Н2 - напір на вході активного гасника енергії в обвідному трубопроводі; Qзв.2 - витрата при зворотному потоці рідини в обвідному трубопроводі; АГЕ - коефіцієнт корисної дії активного гасника енергії; Г - коефіцієнт корисної дії електричного генератора, яку порівнюють з величиною встановленої потужності РПЧ перетворювача частоти; при виконанні умови РГ РПЧ за допомогою пристрою керування і прийняття рішень формують сигнал керування Uк4 на силовий перемикач для підключення вихідних затискачів генератора до входу перетворювача частоти. Основною гідравлічною характеристикою арматури, що впливає на параметри гідротранспортування є залежність коефіцієнта гідравлічного опору від відносного ступеня відкриття (фіг. 1), де: - = h/D0 для засувок і вентилів; h - висота підняття робочого органу; D0 - внутрішній діаметр трубопроводу; - = (1- ) 90° для дискових затворів; - кут повороту обертального диску; - = Sh/S0 для регулюючих клапанів; Sh - вільна площа поперечного перетину сідла; S0 - площа поперечного перетину трубопроводу. Характер зміни ( ) нелінійний: суттєве зростання коефіцієнту гідравлічного опору відбувається при деякому критичному значенні кр, яке для засувок складає 0.25, для вентилів - 0.3, для дискових затворів - 0.6, для регулюючих клапанів 0.2. У більшості випадків криві = f( ) отримані експериментальним шляхом і приводяться у довідковій літературі у вигляді табличних значень для конкретного роду арматури або емпіричних залежностей, що є справедливими для певного діапазону зміни . При цьому не існує універсальної аналітичної залежності, яка пов'язує коефіцієнт гідравлічного опору , з відносним ступенем відкриття , яку необхідно мати для визначення оптимальних законів керування трубопровідною арматурою. У зв'язку з цим запропонована апроксимаційна функція виду: = A((1/ )-1)C+B((1/ )-1)D+ 0, (1) 7 52073 8 де А, В, С, D - коефіцієнти апроксимації, що величина котрих впливає на характер динамічних залежать від типу трубопровідної арматури; процесів в трубопроводі: = 1-(t/tзaкp.)1/n, n 1; (2) 0 - коефіцієнт гідравлічного опору при повноде n - коефіцієнт інтенсивності закриття армаму відкритті арматури ( =1). тури; Відносний ступінь відкриття засувки залежить tзaкp. - час повного закриття арматури, с. від інтенсивності і тривалості закриття арматури, Підвищення напору при непрямому гідроударі (tзaкp.>Тф) у кожній його фазі визначається з виразу: k 1 Hk 2 hтр j 1 / hтр Hi j k/ 02 k 1 j k/ 0 1 2 j i 1 - коефіцієнти швид0,k 1 / тр. зад. кості трубопровідної системи з арматурою до початку закриття і при поточному відносному ступені відкриття засувки відповідно; тр. - коефіцієнт гідравлічного опору трубопровідної системи; зад.( ) ~ коефіцієнт гідравлічного опору засувки при поточному відносному ступені відкриття . Для гідросистеми з встановленою у комунікаційній мережі споживача регулювальною засувкою і параметрами 0 = 1 м/с, с = 1000 м/с, hтр = 7.13 м, L = 3000м, тр = 140, Тф = 6 с приведені графіки зміни Hk = f(n, Тф) (фіг. 2), де Нпр = 101.9 м - підвищення напору при прямому гідроударі. Шляхом побудови кривих зміни Нk у часі для ряду значень параметрів n, tзaкp., 0 і вибору максимальних значень Нk запропонована багатофакторна модель виду: - швидкість пошиЕ ж / Е тр рення ударної хвилі, м/с; Еж - модуль об'ємної пружності рідини; Етр - модуль пружності матеріалів стінок труби; cж / 1 - швидкість поширення звуку в сж Еж / рідині, м/с; - коефіцієнт, що враховує деформативність стінок трубопроводу; h(n, , 0) = a0( 0)+a1( 0) n+a2( 0) +a3( 0) n2+a4( 0) де a k 0 b 0k b1k n 2 0 b 2k e 0 , b0k, b1k, b2k(k=0, 1, 2...9) – коефіцієнти апроксимації; h= Hk max// Hпp - відносне підвищення напору; = tзакр/Тф - відносний час закриття арматури, кратне фазі гідроудару Тф. Параметри моделі n, , 0 змінюються у діапазонах n = 1 nmax, = 1 mах, 0 = 0,2 5 м/с відповідно, де nmах = 12, mах = 10 – максимальне значення коефіцієнту інтенсивності закриття й відносного часу закриття арматури відповідно. Вказані діапазони зміни параметрів і n дозволяють керувати підвищенням тиску в гідросистемі у допустимих межах, а діапазон зміни швидкості течії рідини охоплює широке коло НК з різними параметрами трубопровідної мережі (діаметром, довжиною і т.і.). На фіг. 3 наведені графіки зміни відносного підвищення напору h від відносного часу закриття т і коефіцієнта інтенсивності закриття арматури n для вибраного діапазону зміни початкової швидко j k / 0 2 , (3) Hi i 1 де Нi - підвищення напору у кожній фазі до тої, що розглядається, м; j= 0c/(2g hтp) - ударний параметр трубопроводу; 0 - початкова швидкість течії рідини в трубопроводі до закриття арматури, м/с; hтp - втрати напору на тертя за довжиною трубопроводу, м; c 1 / hтр 2 +a5( 0) n +a6( 0) n3+a7( 0) 3 +a8( 0) n 2 +a9( 0) n2 , (4) сті течії робочого середовища 0. Область оптимального керування арматурою дозволяє знайти значення nопт. і tзaкp. опт., що відповідають такому темпу керування, при котрому тиск в трубопроводі змінюється в припустимих межах. Аналіз зміни відносної величини гідроудару від коефіцієнту інтенсивності керування арматурою (фіг. 3) показує, що при n = 7 12 i = 5 10 тиск в комунікаційній мережі не перевищує 40 % від номінального значення. На фіг. 4 наведений алгоритм способу зниження динамічних навантажень в насосному комплексі, коли в якості резервного джерела живлення ЕП запірно-регулюючої арматури використовується пристрій безперебійного живлення (суцільні лінії) або активний гасник енергії гідропотоку з електричним генератором на одному валу (пунктирні лінії). 9 52073 10 11 Комп’ютерна верстка В. Мацело 52073 Підписне 12 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for decrease of dynamical loads in pump complex with controlled fittings
Автори англійськоюRodkin Dmytro Yosypovych, Korenkova Tetiana Valeriivna, Kravets Oleksii Mykhailovych
Назва патенту російськоюСпособ снижения динамических нагрузок в насосном комплексе с управляемой арматурой
Автори російськоюРодькин Дмитрий Иосифович, Коренькова Татьяна Валериевна, Кравец Алексей Михайлович
МПК / Мітки
МПК: F04D 27/00
Мітки: керованою, насосному, зниження, арматурою, навантажень, спосіб, динамічних, комплекси
Код посилання
<a href="https://ua.patents.su/6-52073-sposib-znizhennya-dinamichnikh-navantazhen-v-nasosnomu-kompleksi-z-kerovanoyu-armaturoyu.html" target="_blank" rel="follow" title="База патентів України">Спосіб зниження динамічних навантажень в насосному комплексі з керованою арматурою</a>
Пристрій для захисту обсадних колон свердловин від динамічних навантажень

Номер патенту: 53368
Опубліковано: 15.01.2003
Автори: Богатиренко Вікторія Альфредівна, Михалюк Альфред Володимирович, Лисюк Микола Олександрович, Осташко Валентина Юріївна
Мітки: пристрій, навантажень, колон, обсадних, динамічних, свердловин, захисту
Формула / Реферат:
1. Пристрій для захисту обсадних колон свердловин від динамічних навантажень, що складається з вузла гасіння ударної хвилі з перфорованими торцевими кришками, який відрізняється тим, що кришки розташовують в середині корпусу паралельно одна одній, а в отвори перфорації вставляють і приварюють металеві трубки так, що їх верхній кінець знаходиться на рівні з верхньою кришкою, а нижній виступає за нижню кришку.2. Пристрій за п. 1, який...
Бетонна шпала для високих динамічних навантажень і спосіб її виготовлення

Номер патенту: 89508
Опубліковано: 10.02.2010
Автор: Фройденштайн Стефан
МПК: E01B 3/00
Мітки: високих, спосіб, виготовлення, динамічних, шпала, бетонна, навантажень
Формула / Реферат:
1. Спосіб виготовлення бетонної шпали для високих динамічних навантажень у мульді для шпали, який відрізняється тим, що стандартний бетон високої міцності, спроможний витримувати високі стискаючі сили, зв’язують в мульді для шпали шляхом накладання вологої маси на вологу масу та застигання із стійким до зносу, стирання та розтягування спеціальним бетоном, який утворює опорні поверхні для рейок.2. Спосіб за п. 1, який відрізняється...
Спосіб зниження пікових навантажень електроспоживання
Номер патенту: 18105
Опубліковано: 16.10.2006
Автори: Джамаль Сергій Валентінович, Катвалюк Анатолій Лазаревич
Мітки: зниження, електроспоживання, спосіб, пікових, навантажень
Формула / Реферат:
1. Спосіб зниження пікових навантажень електроспоживання, який включає подачу електроенергії споживачу й облік однотарифним чи багатотарифним лічильником, який відрізняється тим, що подачу електроенергії споживачу здійснюють по двох вводах, при цьому підключення потужних теплогенеруючих електронавантажень здійснюють до одного з вводів, а інші навантаження споживача підключають до іншого вводу, при цьому підключення до мережі потужних...
Спосіб визначення характеристик чутливості вибухових речовин до динамічних навантажень
Номер патенту: 75238
Опубліковано: 15.03.2006
Автор: Петренко Олександр Васильович
МПК: G01N 33/22
Мітки: навантажень, характеристик, визначення, чутливості, динамічних, вибухових, речовин, спосіб
Формула / Реферат:
1. Спосіб визначення характеристик чутливості вибухових речовин до динамічних навантажень, що включає розміщення вибухової речовини між торцями двох роликів, навантаження постійним тиском, прикладання до неї динамічного навантаження, поступове збільшення його величини та фіксацію величини динамічного навантаження, котре збуджує вибух, який відрізняється тим, що динамічне навантаження здійснюють за гармонічним законом при ряді фіксованих...
Спосіб одержання шаруватого композитного матеріалу для захисту від динамічних навантажень
Номер патенту: 27583
Опубліковано: 15.09.2000
Автори: Патон Борис Євгенович, ТРИГУБ Микола Петрович, Жук Генадій Віліорович, ДЕРЕЧА Олександр Якович, Пап Петро Аркадійович
МПК: B22F 7/00, B22F 7/02, B22D 23/00
Мітки: матеріалу, спосіб, динамічних, захисту, шаруватого, одержання, навантажень, композитного
Формула / Реферат:
1. Способ получения композиционного материала для защиты от динамических нагрузок, включающий подачу предварительно нагретой первой составляющей композиционного материала, нанесение на нее слоя последующей составляющей путем осаждения потока диспергированного расплава и проплавление последующей составляющей на всю толщину нанесенного слоя, отличающийся тем, что подают на поверхность первой составляющей перед нанесением последующей...
Попередній патент: Спосіб визначення координат епіцентру сильного землетрусу, що насувається
Наступний патент: Спосіб виготовлення деталей півсферичної форми
Випадковий патент: Пристрій для транспортування пустотілих виробів