Електропривод
Номер патенту: 6184
Опубліковано: 29.12.1994
Автори: Гольц Марк Єфимович, Богданов Ігор Костянтинович, Прокопенко Олександр Адольфович, Литвин Микола Сергійович


Формула / Реферат
(57) Электропривод, содержащий электродвигатель, якорная обмотка которого подключена к усилителю мощности, последовательно соединенные блок задания, регулятор скорости, регулятор тока, выход которого подключен к усилителю мощности, датчик тока электродвигателя, выход которого соединен со вторым входом регулятора тока и с первым выделителем модуля, датчик скорости электродвигателя, выход которого соединен со входами регулятора скорости и второго выделителя модуля, фильтр нижних частот, вход которого подключен к выходу импульсного усилителя мощности, исполнительный элемент с самоблокированием, однопороговый компаратор, вход которого подключен к выходу сумматора, отличающийся тем, что в него введены последовательно соединенные третий выделитель модуля, узел гальванической развязки, соединенный с сумматором, а сумматор выполнен на инвертирующей операционном усилителе, вход третьего выделителя модуля соединен с фильтром нижних частот, выходы первого и второго выделителей модулей соединены со входами сумматора, выход однопорогового компаратора соединен со сходом исполнительного элемента с самоблокированием.
Текст
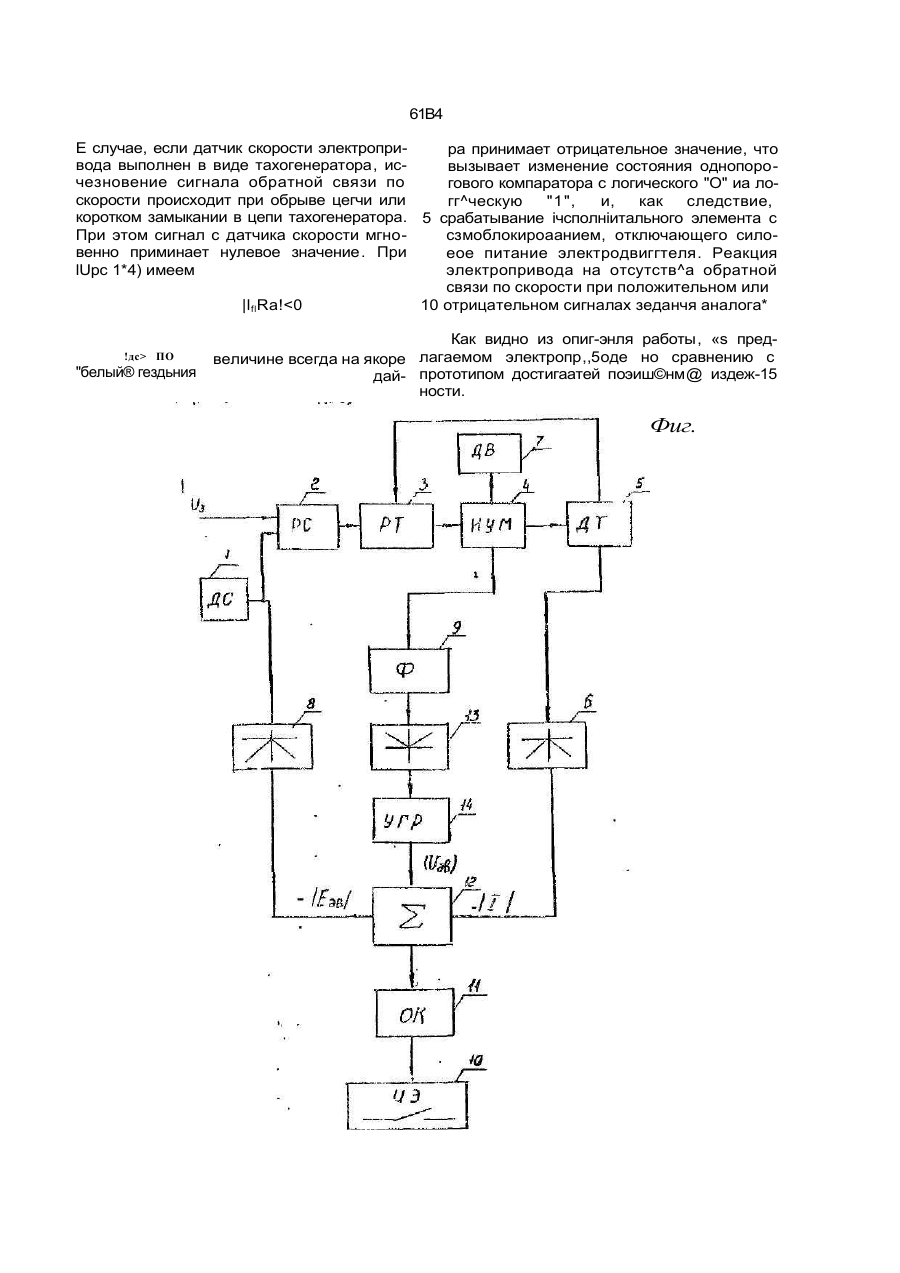
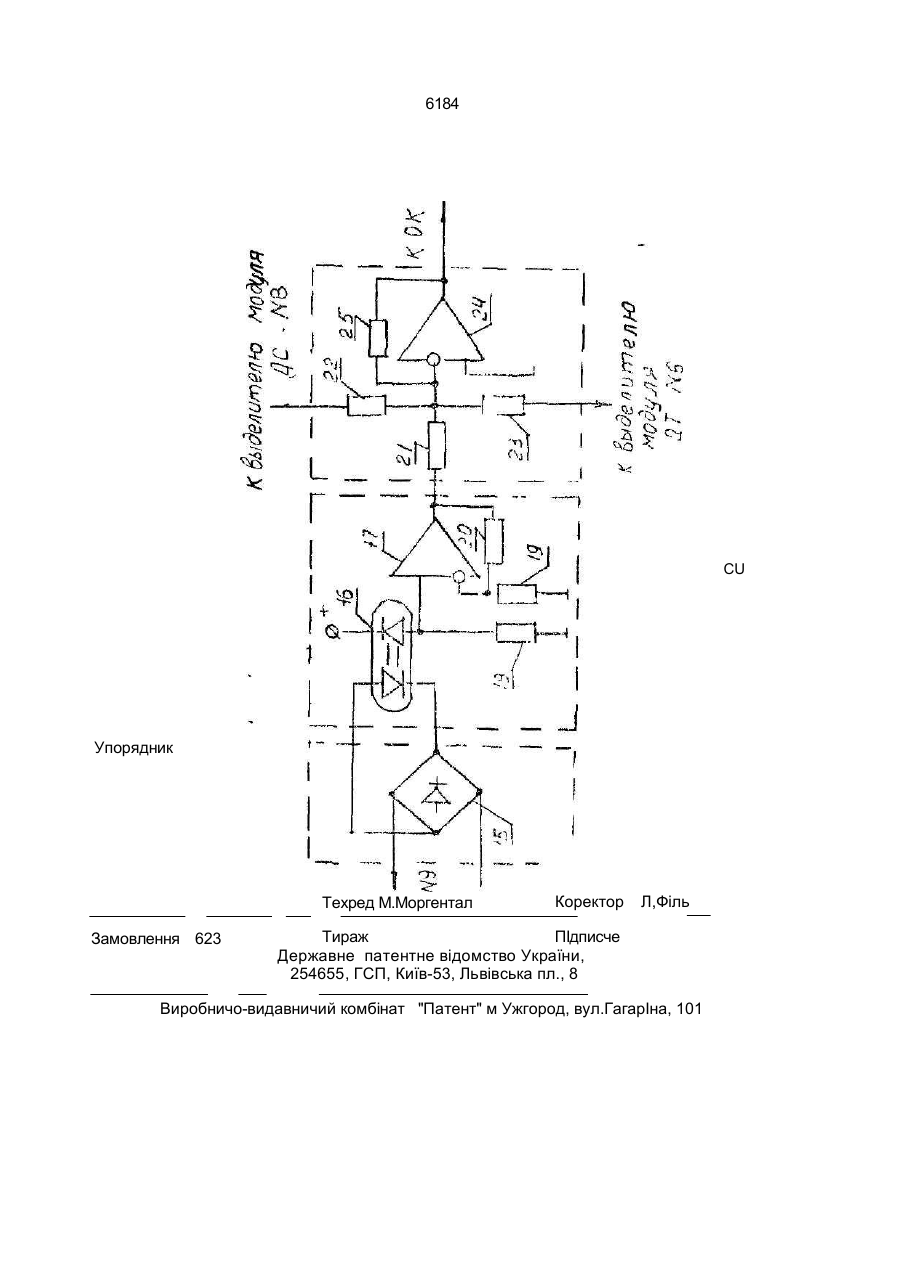
Электропривод, содержащий электро двигатель, якорная обмотка которого под ключена к усилителю мощности, последовательно соединенные блок зада ния, регулятор скорости, регулятор токе, вы ход которого подключен к усилителю мощности, датчик тока электродвигателя. выход которого соединен со вторым входом регулятора тока и с первым выделителем модуля, датчик скорости электродемгателя, выход которого соединен со входами регулятора скорости и второго выделителя модуля, фильтр нижних частот, вход которого подключен к выходу импульсного усилителя мощности, исполнительный элемент с само^локированием, однопорогоаый компаратор, вход которого подключен к выходу сумматора, о т л и ч а ю щ и й с я тем, что в него введены последовательно соединенные третий выделитель модуля, узел гальванической развяски, соединенный с сумматором, а сумматор выполнен на инвер тирующей операционном усилителе, вход третьего выделителя модуля соединен с фильтром нижних частот, выходы первого и второго выделителей модулей соединены со входами сумматора, выход однопорогового компаратора соединен со сходом исполнительного элемента с самоблокированием. Изобретение относится к электротехнике, а именно к регулированию скорости вращения электродвигателей (постоянного или переменного тока) м может найти применение в системах автоматизированного многокоординатного электропривода станков, прессов, роботов и пр. Наиболее близким по технической сущности заявляемому объекту является электропривод Э [1]. содержащий электродвигатель, якорная обмотка которого подключена к усилителю мощности, последовательно соединенные блок задания, регулятор скорости, регулятор тока, выход которого подглючен к усилителю мощности, датчик тока эпектродвигзтегя, выход которого соединен со вторым входом регулятора тока и с первый выделителем модуля, дагчик скорости электродвигателя, выход которого соединен со входами регулятора скорости и второго выделитеая модуля, фильтр нижних частот, вход которого подключен к выходу импульсного усилителя мощности, исполнительный элемент с самоблокированием, однопороговый компаратор, ЙХОД которого подключен к выходу сумматора. Кроме того, известный электропривод содержат последовательно соединенные 6184 второй однооороговый компаратор, входом подключенный к выходу сумматора, логиче ский блок, выход которого подключен к ис полнительному элементу с сзмоблокировзнием, причем выход первого однопорогозого компаратора подключен ко второму входу логического блока. Недостатком известного электропривода яалнйтся его низкая надежность, обусотсутствием гальванической развязки схемы управления с силовой частью электропривода, что создает высокий уровень потех и является недопустимым в высокоточных приводах, з также исключает 15 возможность работы многокоординатных приводов, управляемых от одного источника задания и источников задания, гальваниче-гжи связанных между собой; неудовлетворительной чувствительно- 20 стью защиты электропривода к исчезнове нию сигнала обратной связи с датчика скорости. Указанный недостаток объясняет ся следующим. Контроль обратной связи по скорости в описываемом электроприводе 25 осуществляется не непосредственно с дат чика скоросм, а косвенно путем сравнения заданной з.д.с. электродвигателя (сигнал за дания из) и истинной э.д.с, которая форми руется сочетанием сигналов, 30 пропорциональных напряжению приклады ваемому г; двигателю si падению напряже.-«ия в силовой обмотке двигателя (идВ=1дс^+Ёдв)- Такой подход - сравнение аналоговых сигналов определяет существо- 35 минимальной зоны нечувствительно электропривода при исчезновении обратной связи по скорости, что вызывает неуправляемость его. В электроприводе лоототипе зона нечувствительности состав- 40 яиэт 450-550 об/мин. Для высокоточных приводов такой диапазон неуправляемости приводит к аварийным ситуациям; рроме того, сравнение сигналов заданной э.д.с. электродвигателя (сигнал задания 45 Ііз) изменяющегося дискретно и сигнала ис-гииной э.д.с. электродвигателя, изменяюще-ЇОСЯ в определенной степени инерционно, вызывает необходимость в наличии логического блока, распознающего статические ре- 50 жимы работы электропривода от динамических, что ведет к неизбежному усложнению СХ6МЫ. Б основу изобретения поставлена зада-m усовершенствовать электропривод, в ко- 55 тором введением новых блоков, новых счязей и новым выполнением сумматора достигается гальваническая развязка схемы ,."травления с силооой частью двигателя, а также непрерывный контроль за наличием отрицательной обратной связи по скорости, что повышает чувствительность электропривода и таким образом создает возможность использования его в много координатном исполнении. Задача решается тем, что в электроприводе, содержащем электродвигатель, якорная обмотка которого подключена к усилителю мощности, последовательно соединенные блок задания, регулятор скорости, регулятор тока, выход которого подключен к усилителю мощности, датчик тока электродвигателе выход которого соединен со вторым входом регулятора гока и с первым выделителем модуля, датчик скорости электродвигателя, выход которого соединен со входами регулптора скорости и второго выделителя модуля, фильтр нижних частот, вход которого подключен к выходу импульсного усилителя мощности, исполнительный элемент с самоблокированкем, однопороговый компаратор, вход которого подключен к выходу сумматора, согласно изобретению, введены последовательно соединенные третий выделитель модуля, узел гальванической развязки, соединенный с сумматором, э сумматор выполнен на инвертирующем орпр&цілончом усилителе, вход третьего выделителя модуля соединен с фильтром нижних частот, выходы первого и второго выделителей модулей соединены со входами сумматора, выход однопорогового компаратора соединен со входом исполнительного элемента с самоблокированием. В предлагаемом электроприводе по сравнению с прототипом достигается новышение надежности: путем введении гальванической развяз ки схемы управления с силовой целью, что позволяет использовать электроприводы в многокоординатном исполнении, работаю щих от гальванически связанных источников задания; , путем повышения чувствительности контроля за наличием обратной связи по скорости, что исключает случай неуправляемости электропривода; упрощением схемы управления, за счет исключения логического блока и однопорогового компаратора. На фиг, 1 приведена блок-схема заявляемого электропривода. На фиг. 2 приведен пример выполнения третьего выделителя модуля, узла гальванической развязки с подключением к сумматоРУЭлектропривод содержит (фиг. 1) последовательно соединенный датчик скорости 1, регулятор скорости 2, регулятор тока X импульсный усилитель мощности 4, датчик то 6184 ка двигателя 5, выходы которого подключены к регулятору тока З и к первому выделителю модуля 6, электродвигатель 7, подключенный к импульсному усилителю мощности 4, второй выделитель модуля 8, 5 вход которого подключен к датчику скорости I, фильтр нижних частот 9, вход которого подключен к выходу импульсного усилителя мощности 4, исполнительный элемент с са моблокированием 10, однопороговый ком- 10 паратор 11, вход которого подключен к выходу сумматора 12, последовательно сое диненные третий выделитель модуля 13, узел гальванической развязки 14, соединен ный с сумматором 12, вход третьего выдели- 15 теля модуля 13 соединен с выходом фильтра нижних частот 9, выходы первого и второго выделителей модуля 7,8 соединены со вхо дами сумматора 12, выход однопорогового компаратора 11 соединен со входом испол- 20 нительного элемента с самоблокированием 10. Третий выделитель модуля состоит из диодного моста 15 (см. фиг. 2), узел гальва нической развязки содержит оптрон 16, one- 25 рационный усилитель 17 с входными резисторами 18, 19 и резистором обратной связи 20. Сумматор содержит входные рези сторы 21, 22,23, операционный усилитель 24 и резистор обратной связи 25. 30 Электропривод работает следующим образом. При включении силового питания исполнительный элемент с самоблокированием 10 подключает катушку пускателя (контактора) к силовой сети (рабочее состояние). 35 В результате подается силовое питание через импульсный усилитель мощности 4 на электродвигатель 7. Если сигнал задания равен нулю, то на выходе регулятора скорости 2 и регулятора 40 тока 3 сигналы также равны нулю. Скорость двигателя 6 равна нулю. Сигнал на выходе сумматора 12 также равен нулю из-за равенства нулю значений входных сигналов сумматора 12, модуля тока двигателя 7, модуля 45 напряжения двигателя 14 и модуля сигнала датчика скорости 8. Равно нулю и напряжение на выходе однопорогового компаратора I1, что определяет рабочее (включенное) со стояние исполнительного элемента с само- 50 блокированием 0. При сигнале задания, например, положительной полярности выходной сигнал регулятора скорости 2 - отрицательной полярности, сигнал с датчика скорости 18 в 55 первый момент равен нулю, регулятор тока 3 отрабатывает сигнал задания регулятора скорости 2, импульсный усилитель мощности 4 подает силовое напряжение на двигателе 7, соответствующее сигналу задания. Двигатель разгоняется. На резистор 21 сумматора 12 (см. фиг. 2) поступает сигнал, пропорциональный напряжению на двигателе. Этот сигнал всегда положительной полярности, независимо от направления вращения двигателя. На резистор 23 сумматора 12 поступает сигнал, пропорциональный модулю тока двигателя с первого выделителя модуля 6; на резистор 22 - модуль сигнала датчика скорости со знаком минус со второго выделителя модули 8. На выходе суммогорз ^2 (операционный усилитель 24) сигнал пропорционален разности: ивЫх24=* ШдсІ -(IUAB Iгде Ядв - полное сопротивление двигателя, учитываемое резистором 23 Сигналы идс и ( 11!дв I -11двЯдв I ) - пропорциональны истинной э.д.с. двигателя. Оба сигнала противоположное по знаку и равные по абсолютной велимине, компенсируя друг друга, обеспечивают нулевое напряжение нэ выходе сумматора 12, Что определяет нулевое состояние однопорогового компаратора 11, и как следствие, рабочее состояние исполнитетьного элемента 10 с самоблокированием Аналогично элеьгоопривод работает в установившихся режлм&х работы npw положительной и отрицательной полярности. При переходных процессах баланс напряжений нарушается из-за появления составляющей Lfi -ТГ Независимо от вида переходного процесса (торможение или пуск) составляющая (Lr^-) принимает отрицательное значение. проходя чеиез выделитяль модуля гока, а сигнал на выходе сумматора иеых£ принимает положительное значение, т.к. последний выполнен на инвертирующей усилителе, на что однопороговый компаратор не реагирует, оставляя электропривод в рабочем состоянии Таким образом, а заявляемом электроприводе осуществляется непрерывный кон троль за наличием отрицательной обратной Связи по скорости. Реакция -электропривода на аварийкой режим при исчезновении обратной связи по скорости происходит следующим образом. 61B4 Е случае, если датчик скорости электроприра принимает отрицательное значение, что вода выполнен в виде тахогенератора, исвызывает изменение состояния однопорочезновение сигнала обратной связи по гового компаратора с логического "О" иа лоскорости происходит при обрыве цегчи или гг^ческую "1", и, как следствие, коротком замыкании в цепи тахогенератора. 5 срабатывание ічсполніитального элемента с При этом сигнал с датчика скорости мгносзмоблокироаанием, отключающего силовенно приминает нулевое значение. При еое питание электродвиггтеля. Реакция lUpc 1*4) имеем электропривода на отсутств^а обратной связи по скорости при положительном или 10 отрицательном сигналах зеданчя аналога* |l flRa! ПО "белый® гездьния Как видно из опиг-энля работы, «s предвеличине всегда на якоре лагаемом электропр,,5оде но сравнению с дай- прототипом достигаатей поэиш©нм@ издеж-15 ности. Фиг. 6184 CU Упорядник Техред М.Моргентал Замовлення 623 Коректор Л,Філь Тираж ПІдписче Державне патентне відомство України, 254655, ГСП, Київ-53, Львівська пл., 8 Виробничо-видавничий комбінат "Патент" м Ужгород, вул.ГагарІна, 101
ДивитисяДодаткова інформація
Назва патенту англійськоюElectric drive
Автори англійськоюBohdanov Ihor Kostiantynovych, Holts Mark Yukhymovych, Lytvyn Mykola Serhiiovych, Prokopenko Oleksandr Adolfovych
Назва патенту російськоюЭлектропривод
Автори російськоюБогданов Игорь Константинович, Гольц Марк Ефимович, Литвин Николай Сергеевич, Прокопенко Александр Адольфович
МПК / Мітки
МПК: H02P 23/00, H02P 7/06
Мітки: електропривод
Код посилання
<a href="https://ua.patents.su/6-6184-elektroprivod.html" target="_blank" rel="follow" title="База патентів України">Електропривод</a>
Дводвигунний електропривод
Номер патенту: 3182
Опубліковано: 26.12.1994
Автори: Попов Віктор Іванович, Ярославцев Михайло Іванович, Лукашенко Андрій Германович
МПК: H02P 5/68
Мітки: дводвигунний, електропривод
Формула / Реферат:
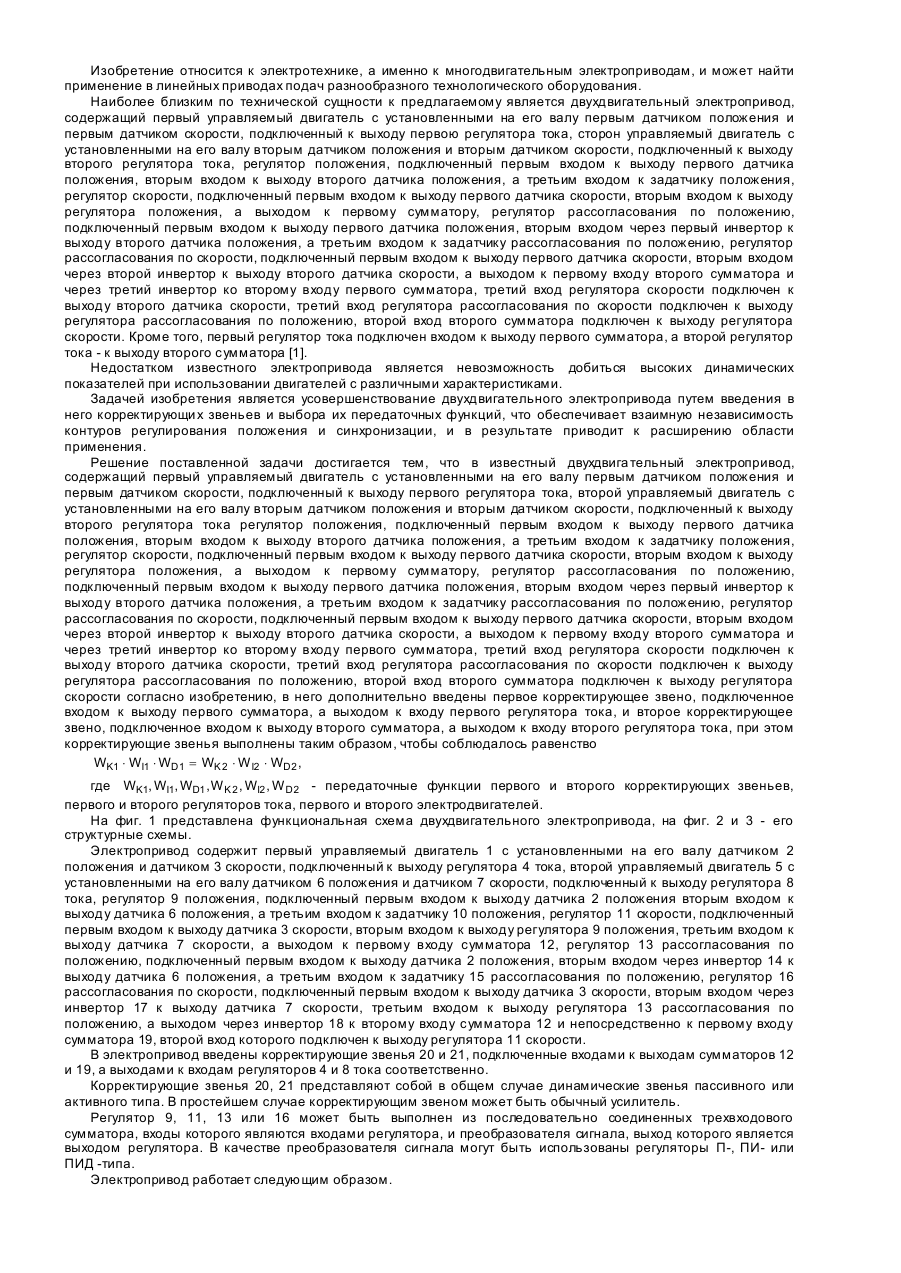
Двухдвигательный электропривод, содержащий первый управляемый двигатель, с установленными на его валу первым датчиком положения и первым датчиком скорости, подключенным к выходу первого регулятора тока, второй управляемый двигатель, с установленными на его валу вторым датчиком положения и вторым датчиком скорости, подключенный к выходу второго регулятора тока, регулятор положения, подключенный первым входом к выходу первого датчика...
Електропривод змінного струму

Номер патенту: 3557
Опубліковано: 27.12.1994
Автор: Вайнтрауб Володимир Ілліч
МПК: H02P 25/00, H02P 23/10, H02P 7/00, H02P 1/00, H02P 27/00
Мітки: змінного, електропривод, струму
Формула / Реферат:
Электропривод переменного тока, содержащий асинхронный электродвигатель, статорная обмотка которого через тиристорный регулятор напряжения подключена к питающей сети, блок сравнения, блок импульсно-фазового управления, первый цифроаналоговый преобразователь, установленный на валу асинхронного электродвигателя, импульсный датчик скорости, один выход которого через первый цифроаналоговый преобразователь подключен к одному входу блока...
Електропривод з частотно-струмовим керуванням
Номер патенту: 3188
Опубліковано: 26.12.1994
Автори: Ярославцев Михайло Іванович, Лукашенко Андрій Германович, Попов Віктор Іванович
МПК: H02P 7/18
Мітки: керуванням, частотно-струмовим, електропривод
Формула / Реферат:
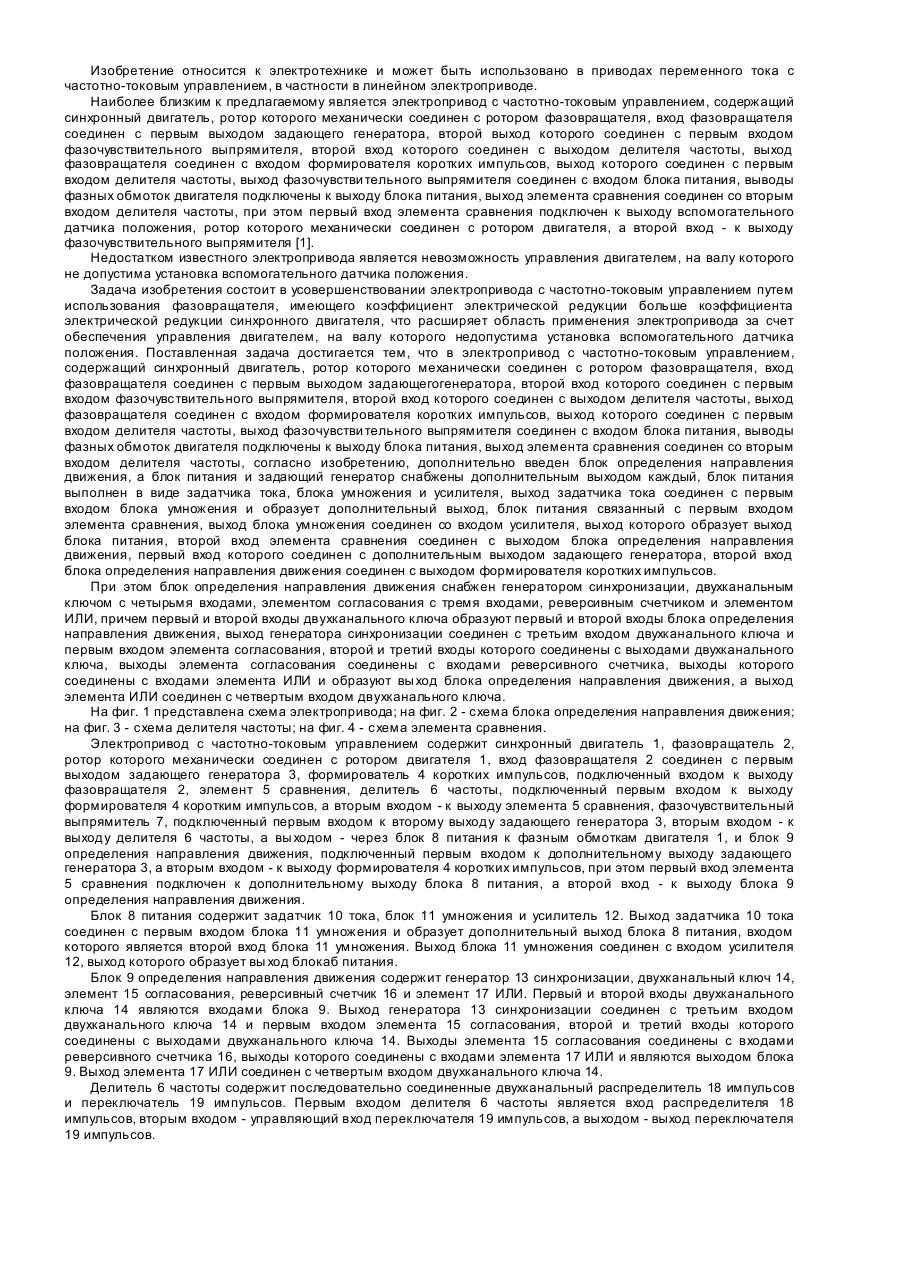
1. Электропривод с частотно-токовым управлением, содержащий синхронный двигатель, ротор которого механически соединен с ротором фазовращателя, вход фазовращателя соединен с первым выходом задающего генератора, второй вход которого соединен с первым входом фазочувствительного выпрямителя, второй вход которого соединен с выходом делителя частоты, выход фазовращателя соединен с входом формирователя коротких импульсов, выход которого соединен с...
Лічильник електроенергії
Номер патенту: 1742
Опубліковано: 25.10.1994
Автори: Смілянський Ігор Ісаакович, Кизилов Володимир Улянович, Давидов Анатолій Семенович
МПК: G01R 11/00
Мітки: електроенергії, лічильник
Формула / Реферат:
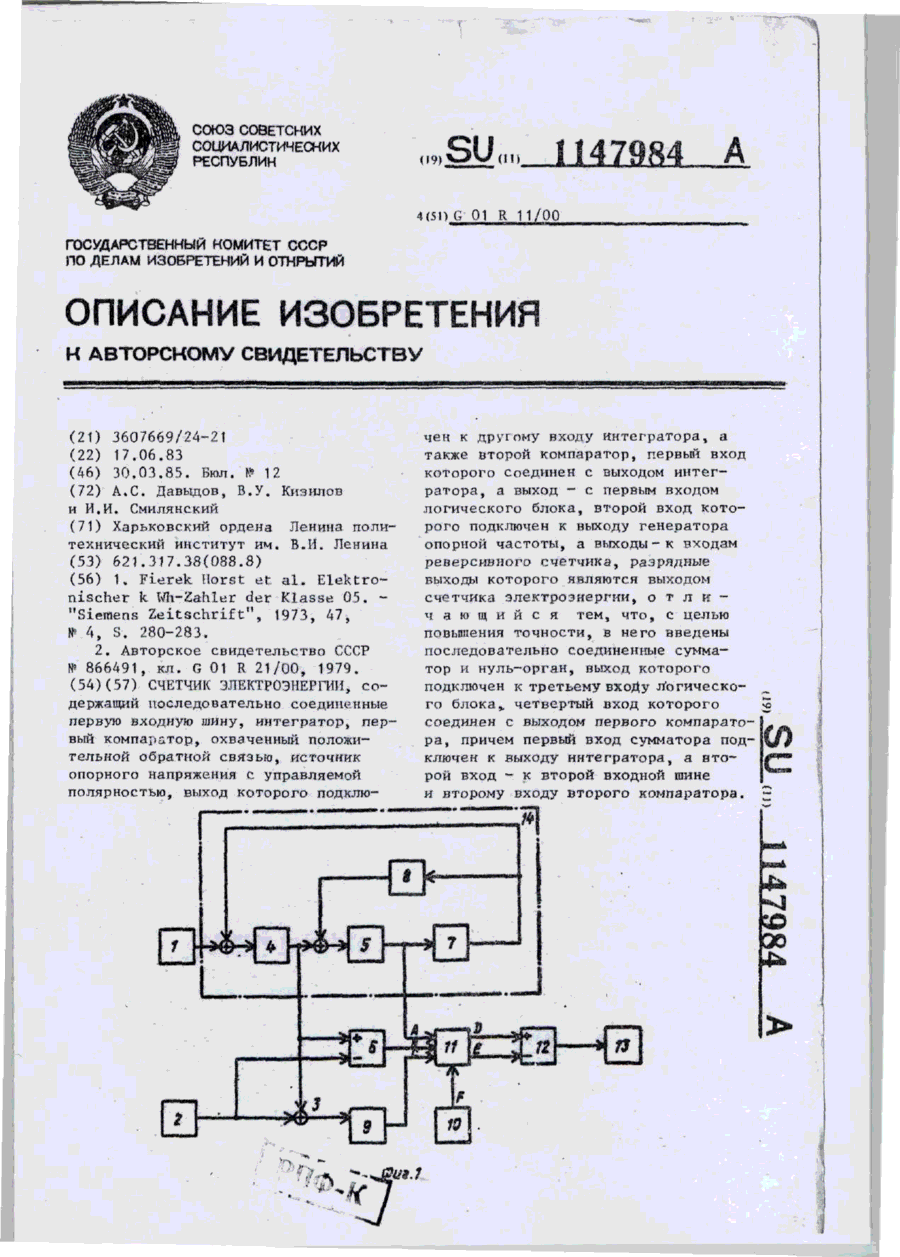
Счетчик электроэнергии, содержащий последовательно соединенные первую входную шину, интегратор, первый компаратор, охваченный положительной обратной связью, источник опорного напряжения с управляемой полярностью, выход которого подключен к другому входу интегратора, а также второй компаратор, первый вход которого соединен с выходом интегратора, а выход — с первым входом логического блока, второй вход которого подключен к выходу генератора...
Груповий моментний асинхронний електропривод

Номер патенту: 128
Опубліковано: 30.04.1993
Автори: Гольцев Володимир Іванович, Філонець Олександр Олександрович, Калюжний Володимир Владиславович
МПК: H02P 5/74
Мітки: груповий, моментний, асинхронний, електропривод
Формула / Реферат:
Формула изобретенияГрупповой моментный асинхронный электропривод, содержащий несколько электродвигателей с фазными роторами, статорные обмотки которых пофазно объединены и предназначены для подключения к сети переменного напряжения, а роторные связаны с входом переменного тока соответствующего мостового неуправляемого выпрямителя, отличающийся тем, что, с целью упрощения, в него дополнительно введены параметрический источник тока,...
Попередній патент: Спосіб отримання литва
Наступний патент: Спосіб виробництва прокату
Випадковий патент: Вітроенергетична установка мілінського ю.м.