Дводвигунний електропривод
Номер патенту: 3182
Опубліковано: 26.12.1994
Автори: Попов Віктор Іванович, Ярославцев Михайло Іванович, Лукашенко Андрій Германович



Формула / Реферат
Двухдвигательный электропривод, содержащий первый управляемый двигатель, с установленными на его валу первым датчиком положения и первым датчиком скорости, подключенным к выходу первого регулятора тока, второй управляемый двигатель, с установленными на его валу вторым датчиком положения и вторым датчиком скорости, подключенный к выходу второго регулятора тока, регулятор положения, подключенный первым входом к выходу первого датчика положения, вторым входом - к выходу второго датчика положения, а третьим входом к задатчику положения, регулятор скорости, подключенный первым входом к выходу первого датчика скорости, вторым входом - к выходу регулятора положения, а выходом - к первому сумматору, регулятор рассогласования по положению, подключенный первым входом к выходу первого датчика положения, вторым входом через первый инвертор - к выходу второго датчика положения, а третьим входом – к задатчику рассогласования по положению, регулятор рассогласования по скорости, подключенный первым входом к выходу первого датчика скорости, вторым входом через второй инвертор - к выходу второго датчика скорости, а выходом - к первому входу второго сумматора и через третий инвертор ко второму входу первого сумматора, третий вход регулятора скорости подключен к выходу второго датчика скорости, третий вход регулятора рассогласования по скорости подключен к выходу регулятора рассогласования по положению, второй вход второго сумматора подключен к выходу регулятора скорости, отличающийся тем, что в него дополнительно введены первое корректирующее звено, подключенное входом к выходу первого сумматора, а выходом к входу первого регулятора тока, и второе корректирующее звено, подключенное входом к выходу второго сумматора, а выходом к входу второго регулятора тока, при этом корректирующие звенья выполнены таким образом, чтобы соблюдалось равенство
![]()
где: ![]() - передаточные функции первого и второго корректирующих звеньев, первого и второго регуляторов тока первого и второго электродвигателей.
- передаточные функции первого и второго корректирующих звеньев, первого и второго регуляторов тока первого и второго электродвигателей.
Текст
Изобретение относится к электротехнике, а именно к многодвигательным электроприводам, и может найти применение в линейных приводах подач разнообразного технологического оборудования. Наиболее близким по технической сущности к предлагаемому является двухдвигательный электропривод, содержащий первый управляемый двигатель с установленными на его валу первым датчиком положения и первым датчиком скорости, подключенный к выходу первою регулятора тока, сторон управляемый двигатель с установленными на его валу вторым датчиком положения и вторым датчиком скорости, подключенный к выходу второго регулятора тока, регулятор положения, подключенный первым входом к выходу первого датчика положения, вторым входом к выходу второго датчика положения, а третьим входом к задатчику положения, регулятор скорости, подключенный первым входом к выходу первого датчика скорости, вторым входом к выходу регулятора положения, а выходом к первому сумматору, регулятор рассогласования по положению, подключенный первым входом к выходу первого датчика положения, вторым входом через первый инвертор к выходу второго датчика положения, а третьим входом к задатчику рассогласования по положению, регулятор рассогласования по скорости, подключенный первым входом к выходу первого датчика скорости, вторым входом через второй инвертор к выходу второго датчика скорости, а выходом к первому входу второго сумматора и через третий инвертор ко второму входу первого сумматора, третий вход регулятора скорости подключен к выходу второго датчика скорости, третий вход регулятора рассогласования по скорости подключен к выходу регулятора рассогласования по положению, второй вход второго сумматора подключен к выходу регулятора скорости. Кроме того, первый регулятор тока подключен входом к выходу первого сумматора, а второй регулятор тока - к выходу второго сумматора [1]. Недостатком известного электропривода является невозможность добиться высоких динамических показателей при использовании двигателей с различными характеристиками. Задачей изобретения является усовершенствование двухдвигательного электропривода путем введения в него корректирующи х звеньев и выбора их передаточных функций, что обеспечивает взаимную независимость контуров регулирования положения и синхронизации, и в результате приводит к расширению области применения. Решение поставленной задачи достигается тем, что в известный двухдвига тельный электропривод, содержащий первый управляемый двигатель с установленными на его валу первым датчиком положения и первым датчиком скорости, подключенный к выходу первого регулятора тока, второй управляемый двигатель с установленными на его валу вторым датчиком положения и вторым датчиком скорости, подключенный к выходу второго регулятора тока регулятор положения, подключенный первым входом к выходу первого датчика положения, вторым входом к выходу второго датчика положения, а третьим входом к задатчику положения, регулятор скорости, подключенный первым входом к выходу первого датчика скорости, вторым входом к выходу регулятора положения, а выходом к первому сумматору, регулятор рассогласования по положению, подключенный первым входом к выходу первого датчика положения, вторым входом через первый инвертор к выходу второго датчика положения, а третьим входом к задатчику рассогласования по положению, регулятор рассогласования по скорости, подключенный первым входом к выходу первого датчика скорости, вторым входом через второй инвертор к выходу второго датчика скорости, а выходом к первому входу второго сумматора и через третий инвертор ко второму входу первого сумматора, третий вход регулятора скорости подключен к выходу второго датчика скорости, третий вход регулятора рассогласования по скорости подключен к выходу регулятора рассогласования по положению, второй вход второго сумматора подключен к выходу регулятора скорости согласно изобретению, в него дополнительно введены первое корректирующее звено, подключенное входом к выходу первого сумматора, а выходом к входу первого регулятора тока, и второе корректирующее звено, подключенное входом к выходу второго сумматора, а выходом к входу второго регулятора тока, при этом корректирующие звенья выполнены таким образом, чтобы соблюдалось равенство WK1 × WI1 × WD1 = WK 2 × W I2 × WD2 , где WK1, WI1, WD1 , W K 2 , WI2 , W D2 - передаточные функции первого и второго корректирующих звеньев, первого и второго регуляторов тока, первого и второго электродвигателей. На фиг. 1 представлена функциональная схема двухдвигательного электропривода, на фиг. 2 и 3 - его структурные схемы. Электропривод содержит первый управляемый двигатель 1 с установленными на его валу датчиком 2 положения и датчиком 3 скорости, подключенный к выходу регулятора 4 тока, второй управляемый двигатель 5 с установленными на его валу датчиком 6 положения и датчиком 7 скорости, подключенный к выходу регулятора 8 тока, регулятор 9 положения, подключенный первым входом к выходу датчика 2 положения вторым входом к выходу датчика 6 положения, а третьим входом к задатчику 10 положения, регулятор 11 скорости, подключенный первым входом к выходу датчика 3 скорости, вторым входом к выходу регулятора 9 положения, третьим входом к выходу датчика 7 скорости, а выходом к первому входу сумматора 12, регулятор 13 рассогласования по положению, подключенный первым входом к выходу датчика 2 положения, вторым входом через инвертор 14 к выходу датчика 6 положения, а третьим входом к задатчику 15 рассогласования по положению, регулятор 16 рассогласования по скорости, подключенный первым входом к выходу датчика 3 скорости, вторым входом через инвертор 17 к выходу датчика 7 скорости, третьим входом к выходу регулятора 13 рассогласования по положению, а выходом через инвертор 18 к второму входу сумматора 12 и непосредственно к первому входу сумматора 19, второй вход которого подключен к выходу регулятора 11 скорости. В электропривод введены корректирующие звенья 20 и 21, подключенные входами к выходам сумматоров 12 и 19, а выходами к входам регуляторов 4 и 8 тока соответственно. Корректирующие звенья 20, 21 представляют собой в общем случае динамические звенья пассивного или активного типа. В простейшем случае корректирующим звеном может быть обычный усилитель. Регулятор 9, 11, 13 или 16 может быть выполнен из последовательно соединенных трехвходового сумматора, входы которого являются входами регулятора, и преобразователя сигнала, выход которого является выходом регулятора. В качестве преобразователя сигнала могут быть использованы регуляторы П-, ПИ- или ПИД -типа. Электропривод работает следующим образом. На управляющий вход регулятора 9 положения подается сигнал 2S3, а на управляющий вход регулятора 13 рассогласования по положению - cигнал 2 DS 3 , где S3 - задание положения, которое должны синхронно отрабатывать электродвигатели 1 и 5, DS 3 -задание рассогласования по положению, которое должны поддерживать при движении электродвигатели 1 и 5. С помощью датчиков 2 и 6, 3 и 7 измеряются текущие положения S1 и S2; скорости перемещения V1 и V2 роторов электродвигателей 1 и 5. Отработка заданий двухдвигательным электроприводом осуществляется за счет одновременного функционирования контура регулирования положения и контура синхронизации. С помощью первого контура роторы двигателей 1 и 5 занимают положения S1 и S2, среднее значение которых равняется S3, т.е. когда S1 + S 2 = 2DS 3 . С помощью второго контура роторы двигателей 1 и 5 занимают положения, удовлетворяющие равенству S 2 - S1 = 2D S3 . За счет одновременного функционирования контуров роторы двигателей 1 и 5 занимают положения S1 = S 3 - D S3 ; S 2 = S 3 + DS 3 . На фиг. 2 приведена структурная схема двухдвигательного электропривода, где WK1 и WK 2 ; WI1 и W I2 ; WD1 и W D2 - передаточные функции корректирующи х звеньев 20 и 21, регуляторов 4 и 8 тока, электродвигателей 1 и 5, WS , W V , W DS , W DV - передаточные функции преобразователей сигналов, входящи х в регуляторы 9, 11, 13 и 16 соответственно. На фиг. 3 приведена преобразованная структурная схема двухдвигательного электропривода в виде взаимосвязанных контуров регулирования положения и синхронизации. Из преобразованной структурной схемы следует, что при выполнении условия: WK1 × WI1 × WD1 = WK 2 × W I2 × WD2 , (1) контуры регулирования положения и синхронизации становятся взаимно независимыми. Независимость контуров регулирования позволяет с помощью соответствующего выбора передаточных функций Ws и Wv, определяющих динамику контура регулирования положения, а затем с помощью выбора передаточных функций W DS и W DV , определяющих динамику контура синхронизации, добиться желаемых характеристик каждого контура регулирования в отдельности, тем самым обеспечить высокие динамические и статические характеристики двухдвига тельного электропривода в целом. Для иллюстрации рассмотрим двухдвигательный электропривод широкоформатного графопостроителя. Электропривод предназначен для перемещения портала, по которому, в свою очередь, перемещают пишущий узел. В качестве управляемых двигателей 1 и 5 используют линейные синхронные двигатели с частотно-токовым управлением. С помощью регуляторов 4, 8 тока, реализующих частотно-токовое управление, обеспечивают управление силой тяги линейных двигателей пропорционально входным сигналам регуляторов 4, 8 тока. В данном случае где К - коэффициент, определяющий соотношение между силой тяги линейного двигателя и входным сигналом регулятора тока: m 1 и m 2 - подвижные массы, перемещаемые электродвигателями 1 и 5. Согласно (1) и (2), корректирующими звеньями 20, 21 выбирают обычные усилители. например, с коэффициентами передачи K1=1, K2=m 2/m 1. Таким образом, введение в двухдвигательный электропривод корректирующи х звеньев и соответствующий выбор их передаточных функций позволяют обеспечить взаимную независимость контура регулирования положения и контура синхронизации при использовании электродвигателей не только с близкими, но и с существенно различными динамическими характеристиками.
ДивитисяДодаткова інформація
Назва патенту англійськоюDouble-motor electric drive
Автори англійськоюYaroslavtsev Mykhailo Ivanovych, Popov Viktor Ivanovych, Lukashenko Andrii Hermanovych
Назва патенту російськоюДвухдвигательный электропривод
Автори російськоюЯрославцев Михаил Иванович, Попов Виктор Иванович, Лукашенко Андрей Германович
МПК / Мітки
МПК: H02P 5/68
Мітки: електропривод, дводвигунний
Код посилання
<a href="https://ua.patents.su/4-3182-dvodvigunnijj-elektroprivod.html" target="_blank" rel="follow" title="База патентів України">Дводвигунний електропривод</a>
Дводвигунний електропривід

Номер патенту: 1603
Опубліковано: 25.10.1994
Автор: Ярославцев Михайло Іванович
МПК: H02P 5/46
Мітки: дводвигунний, електропривід
Формула / Реферат:
Двухдвигательный электропривод, содержащий первый управляемый двигатель с установленными на его валу первым датчиком положения и первым датчиком скорости, подключенный к выходу первого регулятора тока, второй управляемый двигатель с установленными на его валу вторым датчиком положения и вторым датчиком скорости, подключенный к выходу второго регулятора тока, регулятор положения, подключенный первым входом к выходу первого датчика...
Пристрій для стримання перешкод
Номер патенту: 159
Опубліковано: 30.04.1993
Автори: Владимирський Олександр Альбертович, Годлевський Віталій Станіславович
МПК: G01S 7/537
Мітки: пристрій, перешкод, стримання
Формула / Реферат:
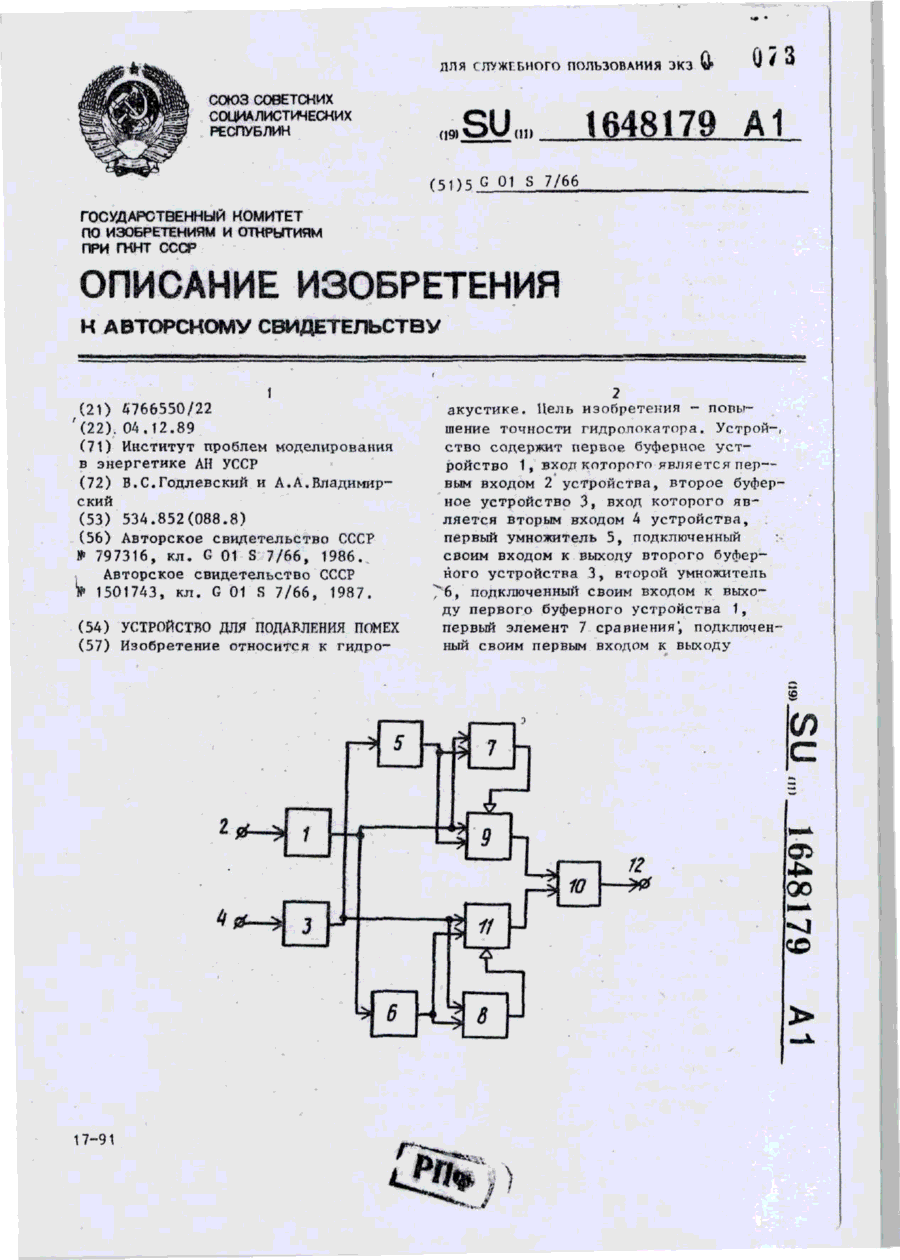
Устройство для подавления помех, содержащее первое буферное устройство, вход которого является первым входом устройства, второе буферное устройство, вход которого является вторым входом устройства, первый умножитель, подключенный своим входом к выходу второго буферного устройства, второй умножитель, подключенный своим входом к выходу первого буферного устройства, первый элемент сравнения, подключенный своим первым входом к выходу первого...
Електропривод з частотно-струмовим керуванням
Номер патенту: 3188
Опубліковано: 26.12.1994
Автори: Лукашенко Андрій Германович, Ярославцев Михайло Іванович, Попов Віктор Іванович
МПК: H02P 7/18
Мітки: частотно-струмовим, електропривод, керуванням
Формула / Реферат:
1. Электропривод с частотно-токовым управлением, содержащий синхронный двигатель, ротор которого механически соединен с ротором фазовращателя, вход фазовращателя соединен с первым выходом задающего генератора, второй вход которого соединен с первым входом фазочувствительного выпрямителя, второй вход которого соединен с выходом делителя частоты, выход фазовращателя соединен с входом формирователя коротких импульсов, выход которого соединен с...
Елекропривод з частотно-струмовим керуванням
Номер патенту: 3185
Опубліковано: 26.12.1994
Автор: Ярославцев Михайло Іванович
МПК: H02P 27/04
Мітки: керуванням, частотно-струмовим, елекропривод
Формула / Реферат:
Электропривод с частотно-токовым управлением, содержащий синхронный двигатель, датчик положения, ротор которого механически соединен с ротором двигателя, а цепь возбуждения подключена к первому выходу источника опорных сигналов, блок выборки-хранения с опорным и управляющими входами, подключенный выходами через регулируемый источник тока к фазным обмоткам двигателя, блок умножения, подключенный первым входом к второму выходу источника опорных...
Вимірювач відстані до місця короткого замикання
Номер патенту: 2057
Опубліковано: 20.12.1994
Автори: Носулько Віктор Дмитрович, Кизилов Володимир Улянович
МПК: G01R 31/08
Мітки: замикання, місця, відстані, короткого, вимірювач
Формула / Реферат:
Измеритель расстояния до места короткого замыкания, содержащий блоки выбора тока и напряжения, соединенные с поврежденными фазами объекта контроля, блок управления, выход которого соединен с управляющим входом блока памяти, к выходу которого подключен вход блока индикации, первый перемножитель, к первому входу которого подключен выход вычитателя, к первому входу которого подключен выход блока выбора напряжения, отличающийся тем, что, с...
Попередній патент: Спосіб керування мостовим інвертором
Наступний патент: Спосіб очищення трубопроводів з мембранними кранами
Випадковий патент: Залізобетонна балка підвищеної ремонтоздатності