Пристрій захисту асинхронного електродвигуна з живленням від перетворювача частоти
Номер патенту: 62510
Опубліковано: 25.08.2011
Автори: Лебедєв Лев Миколайович, Дубовик Володимир Григорович, Скуратовський Євген Олександрович

Формула / Реферат
Пристрій захисту асинхронного електродвигуна з живленням від перетворювача частоти, що містить блок живлення, блок датчиків струму, три джерела постійної вхідної дії, два порогові елементи, елемент І, блок незалежної витримки часу, який відрізняється тим, що додатково містить сполучені блок визначення продуктивності обдуву та датчик швидкості, який має зв'язок з електродвигуном, сполучені ключовий елемент та блок вентилятора, а також послідовно сполучені датчик температури, блок визначення тепловідводу, блок визначення втрат потужності, три входи якого сполучені з виходами блока датчиків струму, а вихід сполучено через пороговий елемент з входом елемента І, другий вхід якого сполучено з ланцюгом сигналу ПУСК, а вихід - з входом перетворювача частоти, другий вхід якого сполучено з ланцюгом мережі живлення, блоком живлення та з входом ключового елемента, три виходи через блок датчиків струму сполучені з трьома входами асинхронного електродвигуна, вихід блока визначення продуктивності обдуву сполучено з входом другого порогового елемента, другий вхід якого сполучено з виходом блока визначення тепловідводу, а вихід через блок незалежної витримки часу - з другим входом ключового елемента, три джерела постійної вхідної дії сполучені, відповідно, з четвертим входом блока визначення втрат потужності, з другим входом першого порогового елемента, з другим входом блока визначення продуктивності обдуву.
Текст
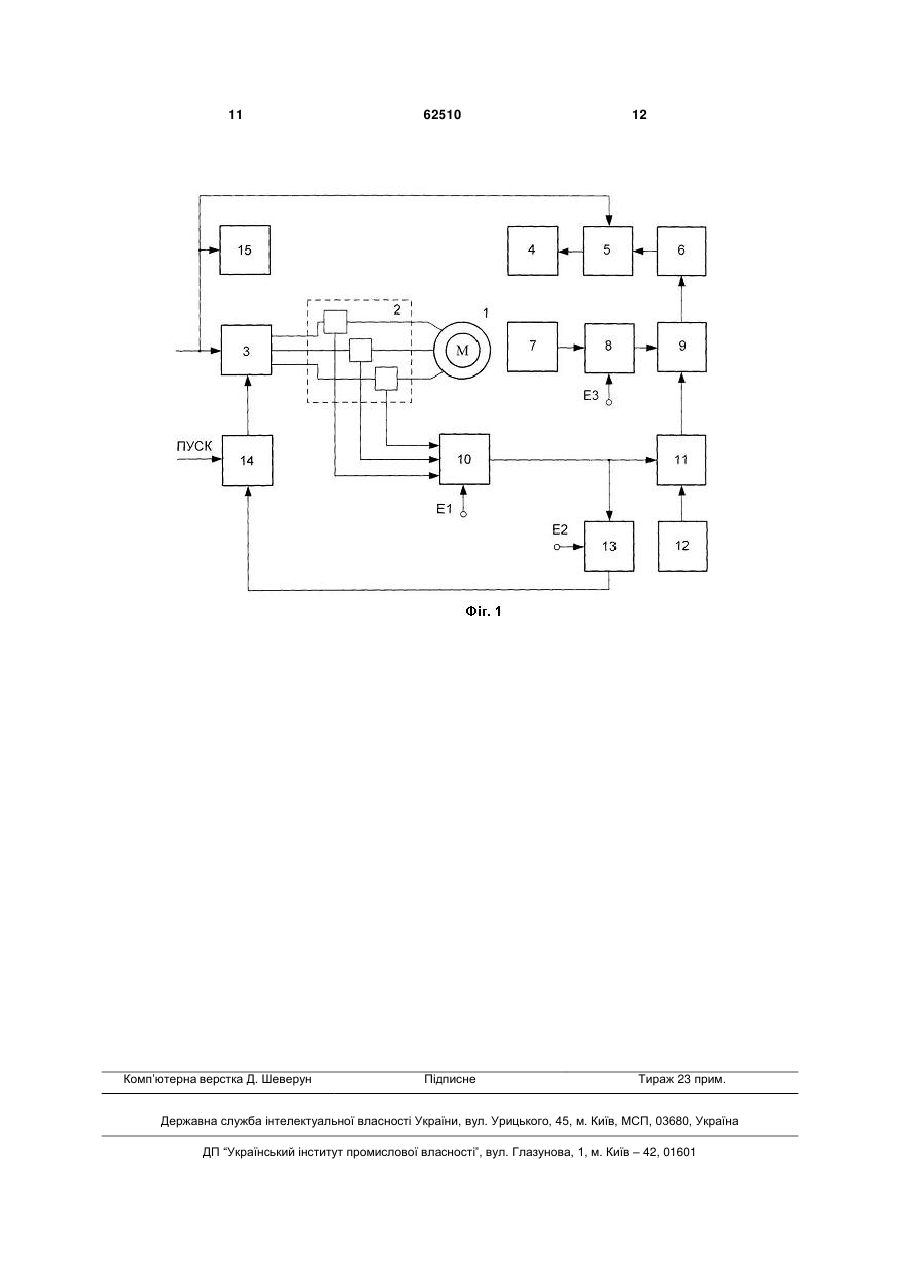
Пристрій захисту асинхронного електродвигуна з живленням від перетворювача частоти, що містить блок живлення, блок датчиків струму, три джерела постійної вхідної дії, два порогові елементи, елемент І, блок незалежної витримки часу, який відрізняється тим, що додатково містить сполучені блок визначення продуктивності обдуву та датчик швидкості, який має зв'язок з електродвигуном, сполучені ключовий елемент та блок вентилятора, а також послідовно сполучені датчик температури, блок визначення тепловідводу, блок U 1 3 дником пристрою, причому входи датчиків струму є вхідними виводами пускача, виходи якого з'єднані з асинхронним електродвигуном, блок контролю часу пуску і струму, послідовно сполучені блок контролю наявності напруги і блок порядку чергування фаз, блок незалежної витримки часу, три елементи І-НЕ, три джерела постійної вхідної дії і три порогові елементи, перші входи яких сполучені з першим джерелом постійної вхідної дії, а другі входи - з відповідними трьома виходами блока датчиків струму і трьома входами блока контролю часу пуску і струму, четвертий, п'ятий входи якого сполучені відповідно з другим і третім джерелами постійної вхідної дії, а вихід сполучений з другими входами першого, другого, третього елементів І-НЕ, виходи яких сполучені з трьома входами блока контролю наявності напруги і порядку чергування фаз, регулятор напруги, перший та другий входи якого мають виводи для підключення до контактів розмикаючого блок-контакту пускача, третій вхід підключений до виходу блока незалежної витримки часу, а четвертий вхід сполучений з входом блока живлення, при цьому вихід регулятора напруги має вивід для підключення до входу пускача, а також містить елемент АБО, блок гальванічної розв'язки, послідовно з'єднані аналізатор спектра, формувач коефіцієнта несинусоїдальності (THD) напруги, четвертий пороговий елемент, другий вхід якого з'єднаний із четвертим джерелом постійної вхідної дії, а вихід - з елементом АБО, другий вхід якого з'єднаний з виходом блока контролю наявності напруги й порядку чергування фаз, вихід елемента АБО з'єднаний з блоком незалежної витримки часу, три входи асинхронного електродвигуна через блок гальванічної розв'язки підключені до трьох входів аналізатора спектра [2]. Недоліком пристрою є низькі функціональні можливості, пов'язані з відсутністю контролю втрат потужності в електродвигуні з урахуванням дії вищих гармонік напруги та струму при різних значеннях частоти обертання його вала. В основу корисної моделі поставлена задача удосконалення відомого пристрою захисту, шляхом введення додаткових елементів, що забезпечує контроль втрат потужності в електродвигуні з урахуванням дії вищих гармонік напруги та струму при різних значеннях частоти обертання його вала. Поставлена задача вирішується тим, що пристрій захисту асинхронного електродвигуна з живленням від перетворювача частоти, що містить блок живлення, блок датчиків струму, три джерела постійної вхідної дії, два порогові елементи, елемент І, блок незалежної витримки часу, який відрізняється тим, що додатково містить, сполучені блок визначення продуктивності обдуву та датчик швидкості, який має зв'язок з електродвигуном, сполучені ключовий елемент та блок вентилятора, а також послідовно сполучені датчик температури, блок визначення тепловідводу, блок визначення втрат потужності, три входи якого сполучені з виходами блока датчиків струму, а вихід сполучено через по-роговий елемент з входом елемента І, другий вхід якого сполучено з ланцюгом сигналу ПУСК, а вихід - з входом перетворювача частоти, 62510 4 другий вхід якого сполучено з ланцюгом мережі живлення, блоком живлення та з входом ключового елемента, три виходи через блок датчиків струму сполучені з трьома входами асинхронного електродвигуна, вихід блока визначення продуктивності обдуву сполучено з входом другого порогового елемента, другий вхід якого сполучено з виходом блока визначення тепловідводу, а вихід через блок незалежної витримки часу - з другим входом ключового елемента, три джерела постійної вхідної дії сполучені, відповідно, з четвертим входом блока визначення втрат потужності, з другим входом першого порогового елемента, з другим входом блока визначення продуктивності обдуву. На фіг. 1 представлена структурна схема пристрою захисту асинхронного електродвигуна з живленням від перетворювача частоти. Пристрій захисту асинхронного електродвигуна 1 з живленням від перетворювача частоти (фіг. 1) складається із блоку 2 датчиків струму, три входи якого сполучені з трьома виходами перетворювача частоти 3, а три перші виходи з фазними ланцюгами електродвигуна 1, блок 4 вентилятора сполучено через ключовий елемент 5 з виходом блока 6 незалежної витримки часу, датчик 7 швидкості, який має зв'язок з електродвигуном 1, сполучено через блок 8 визначення продуктивності обдуву з другим входом другого порогового елемента 9, три входи блока 10 визначення втрат потужності сполучені з трьома другими виходами блока 2 датчиків струму, а його вихід сполучено з другим входом блоку 11 визначення тепловідводу, перший вхід якого підключено до виходу датчика 12 температури, вихід блока 10 визначення втрат потужності сполучено також через перший пороговий елемент 13 з елементом I 14, другий вхід якого сполучено з ланцюгом сигналу ПУСК, а вихід сполучено з входом перетворювача частоти 3, другий вхід якого сполучено з ланцюгом мережі живлення, блоком 15 живлення та з входом ключового елемента 5, вихід порогового елемента 9 сполучено з входом блока 6 незалежної витримки часу, а вхід з виходом блоку 11 визначення тепловідводу, три джерела El, Е2, Е3 постійної вхідної дії сполучені, відповідно, з четвертим входом блока 10 визначення втрат потужності, з другим входом першого порогового елемента 13, з другим входом блока 8 визначення продуктивності обдуву. Блок 2 датчиків струму може бути виконаний з трьох датчиків струму, наприклад, з використанням датчиків струму на ефекті Хола і забезпечує формування вихідного сигналу пропорційного миттєвому значенню струму в ланцюгах живлення електродвигуна без його викривлень. Такі датчики виготовляє фірма LEM. Ланцюги живлення датчиків струму на ефекті Хола не показані. Перетворювач частоти 3, найчастіше, може бути виконаний на основі автономного інвертора напруги з широтно-імпульсною модуляцією з використанням одного з методів частотного управління: скалярного або векторного. При скалярному управлінні вихідна частота і амплітуда напруги змінюються згідно із законом 5 (U / f )n const, , де n 1 , забезпечується постійність перевантажувальної здатності електроприводу незалежно від частоти напруги, проте має місце зниження моменту, що розвивається двигуf ном, при низьких, f 0,1 ном , частотах, діапазон зміни швидкості обертання ротора при незмінному моменті опору досягає 1:10. При відсутності датчика швидкості на валу двигуна неможливо стабілізувати швидкість обертання валу, оскільки вона залежить від навантаження, а також не можна регулювати момент на валу двигуна. При методі векторного управління в систему управління закладається математична модель електродвигуна, яка дозволяє розраховувати момент на валу і швидкість обертання валу з використанням тільки датчиків струму фаз статора, забезпечується незалежне і практично безінерційне регулювання двох основних параметрів - моменту на валу і швидкості обертання. Це також дозволяє плавне, без ривків, обертання двигуна в області малих частот; можливість забезпечення номінального моменту на валу при нульовій швидкості за наявності датчика швидкості, швидку реакція на зміну навантаження без стрибків швидкості, забезпечується режим роботи при мінімальніх втратах на нагрів і намагнічення електродвигуна. В перетворювачах частоти може забезпечуватися максимально-струмовий захист, захист від перегріву двигуна і перетворювача, захист від перевантаження, надмірних відхилень напруги живлення, обриву фази, міжфазного короткого замикання, замикання фази на землю і помилок зв'язку. В них також передбачаються входи для підключення датчика швидкості, а також можуть бути виходи з сигналом напруги, пропорційним вихідній частоті перетворювача частоти. Захист від перегріву електродвигуна являється аварійним і він не може забезпечити контроль режимів його охолодження при різних значеннях навантаження, та при зміні частоти обертання вала ротора. Живлення перетворювача частоти 3 може здійснюватися від однофазної чи трифазної мережі, на фіг 1 показано в вигляді однієї лінії. Ланцюги для задания вихідної частоти та інших налаштувань перетворювача частоти не приведені. Блок 5 вентилятора може бути виконаний з використанням вентилятора з приводом від окремого електродвигуна і забезпечує подачу повітря для додаткового охолодження електродвигуна 1. Продуктивність блока 5 вентилятора близька до продуктивності колеса вентилятора електродвигуна 1. Блок 6 незалежної витримки часу може бути виконаний з використанням елементів затримки і забезпечує затримку на заданий інтервал часу формування вихідного сигналу для запобігання випадкових переключень в пристрої. Датчик 7 швидкості може бути виконаний з використанням електричної машини або перетворювача імпульсної послідовності частоти обертання, які контактно чи безконтактно зв'язані з валом електродвигуна і забезпечує формування вихідного сигналу, пропорційного частоті обертання валу електродвигуна 1. Якщо пристрій захисту живиться 62510 6 від перетворювача частоти з векторним керуванням, то використання датчика швидкості не обов'язкове, так як, при цьому замість вихідного сигналу датчика 7 швидкості може бути використаний сигнал, який пропорційний частоті обертання вала електродвигуна 1, з окремого виходу перетворювача частоти. Блок 8 визначення продуктивності обдуву може бути виконаний з використанням функціонального перетворювача, який реалізує залежність U8 E3 U7 / U7 н і забезпечує формування вихідного сигналу при зміні сигналу датчика швидкості U7 від номіU7 н нального значення . Блок 10 визначення втрат потужності в електродвигуні 1 може бути виконаний з використанням функціональних вузлів, перетворювачів сигналів, які забезпечують визначення втрат потужності з Г10 Pд урахуванням значення Е1, а також, що , Pд Pе м Pмех , Pд де - втрати потужності в електродвигуні 1, Pе м - електромагнітні втрати потужності, Pмех - механічні втрати потужності. Pмех Механічні втрати потужності складають приблизно 5-10 % від номінальних втрат потужності і мають квадратичну залежності тільки від частоти обертання вала електродвигуна. Pе м Електромагнітні втрати потужності місPдоб тять додаткові втрати , а також основну Pе м1 Pе м.п і модуляційну складові злектромагнітних втрат потужності Pе м Pдоб Pе м1 Pе м.п , з яких два перших доданки залежать від амплітуди основної гармоніки фазного струму статора, а останній доданок від дії всіх вищих гармонійних складових фазного струму статора. Pе м1 Основні електромагнітні втрати потужPе 1 ності складаються із електричних втрат і Pм1 магнітних втрат у сталі за виразом Pе м1 Pе1 Pм1 . Pе м.п Модуляційні електромагнітні втрати Pе п потужності складаються з електричних втрат Pм.п та магнітних втрат у сталі за виразом Pе м.п Pе.п Pм.п , які розраховуються згідно наступних залежностей Pе1 3 / 2(Rs k 2RR sin 2 ) I12 2 ; Pм1 Pмн(Lm cos k L R sin2 ) 11,3I12 / мн2 ; 2 2 2 7 Pе .п 1/ 2(RS k 2RR ) п Iп2 62510 ператури повітря для охолодження електродвигуна 1. ; Pм.п Pмнk 2L R 2п1,3 Iп2 / мн2 8 , P I де н , 1н и н - номінальні значення, відповідно, потужності, струму статора і ККД електродвигуна 1; Pмн мн і - номінальні значення втрат в сталі і амплітуда магнітного потоку в повітряному зазорі електродвигуна 1; R s RR і - номінальні значення активного опору статора і ротора електродвигуна 1, відповідно; L m LR і - номінальні значення індуктивності намагнічення та індуктивності розсіяння ротора електродвигуна 1, відповідно; - кут навантаження - кут між узагальненими векторами струму статора і потозчепленням ротора; k - коефіцієнт зв'язку ротора електродвигуна 1; 1 - відносна частота основної гармоніки 1 fп / 50 fп , - вихідна частота перетворювача 3; I1 - поточне значення амплітуди основної гармоніки фазного струму статора електродвигуна 1; Iп - середньоквадратичне відхилення модуля узагальненого вектора струму Is статора від свого I середнього значення, рівного 1 . Номінальні значення величин для визначення U10 Pд вводяться в блок 10, і ланцюги для їх вводу не приведені, крім номінального значення потужності, яка пропорційна амплітуді джерела постійної вхідної дії Е1. Блок 11 визначення тепловідводу може бути виконаний з використанням функціонального перетворювача і забезпечує визначення значення G подачі повітря п для тепловідводу з врахуванG Pд / Сд (tн t ) 3 ням п , м /год., де Pд - втрати потужності в електродвигуні 1, Вт; Cп - питома теплоємність повітря, 0,35 Вт • 3 год./ м • град; tн - значення температури електродвигуна 1 при номінальному режимі роботи, град; t – поточне значення температури повітря для охолодження, за виразом U11 U10 / k (Ut н U12 ) k Cп , - пропорційне . Ut н Номінальне значення величин k та пропоtн рційної вводяться в блок 11 і ланцюги для їх вводу не приведені. Датчик 12 температури може бути виконаний з використанням елементів з додатнім температурним коефіцієнтом і забезпечує вимірювання тем U i Прийняті позначення n - амплітуда сигналу на і-му виході n-го блоку. Працює пристрій таким чином. Після подачі напруги в силові ланцюги подається напруга на блок живлення 15 та на другий вхід перетворювача частоти 3. Натискається кнопка ПУСК (не показана) і сигнал логічної одиниці подається на другий вхід елемента І 14, на його виході також встановлюється рівень логічної одиниці, що забезпечує розгін електродвигуна за допомогою перетворювача частоти 3. При його роботі сигнали з блоку 2 датчиків струму подаються на блок 10 визначення втрат потужності, а на його виході появляється сигнал, пропорційний значенню втрат потужності в електродвигуні 1, який подається на блок 11 визначення тепловідводу та на пороговий елемент 13 з характеристикою 1, при U10 E2 U13 0, при U10 E2. E 2 – напруга, пропорційна значенню допустимих втрат потужності в електродвигуні 1. На вхід блока 11 подається також сигнал, пропорційний температурі повітря охолодження електродвигуна 1, від датчика 12 температури, а на U виході появляється сигнал 11 , пропорційний значенню подачі повітря для тепловідводу, який подається на пороговий елемент 9 з характеристикою 1, при U11 U8 U9 0, при U11 U8 . U 0 При 9 вихідний сигнал блока 6 незалежної витримки часу також дорівнює нулю і він подається на ключовий елемент 5. При цьому він залишається розімкнутим і на блок 4 вентилятора напруга живлення не подається. Ключовий елемент 5 замикається тільки при умові подачі на його вхід від блоку 6 сигналу логічної одиниці. Для зупинки електродвигуна 1 сигнал ланцюга ПУСК на вході елемента 14 переводиться в нуль і на його виході встановлюється нуль, що приводить до відключення напруги з виходу перетворювача частоти 3. Вищі гармоніки зумовлюють збільшення втрат в статорі та роторі електродвигуна. Додаткові втрати потужності підвищують температуру, з'являються локальні місця перегрівання, з'являються додаткові моменти на частотах вищих гармонік, які можуть призвести до відчутних вібрацій електродвигуна. В результаті підвищеного нагріву відбувається прискорене старіння ізоляції, а також необоротні фізико-хімічні процеси, що протікають під впливом полів вищих гармонік. Вихідні струми і напруга перетворювача частоти на відміну від стандартної мережі мають не синусоїдальну форму. Це приводить до збільшення напруги ізоляції двигуна, збільшуються його втрати. Оскільки технічною умовою заводу 9 виготівника не передбачаються випробування стандартного асинхронного двигуна при живленні його від перетворювача частоти, з'являється необхідність в проведенні додаткових перевірок двигуна. Міжнародним електротехнічним комітетом, прийнято стандарт МЭК 34-17 «Асинхронні двигуни з короткозамкнутим ротором при живленні від перетворювачів частоти», де рекомендується для збільшення охолоджуючої потужності двигуна при низькій частоті обертання використовувати окремий вентилятор з постійною максимальною частотою обертання, так як, потік повітря і охолоджуюча продуктивність залежать від частоти обертання вентилятора. При перевантаженні електродвигуна 1 або коли по технології робочого процесу, при керуванні перетворювачем частоти 3 задається частота обертання вала нижче номінальної, його втрати потужності зростають, а продуктивність колеса обдуву знижується. При цьому вихідний сигнал блоку 10 зростає, що приводить до зростання сигналу на виході блоку 11, крім того сигнал на виході блоку 8 зменшується, і це призводить до переключення порогового елемента 9, на виході якого встановлюється рівень логічної одиниці. З затримкою, встановленою для блоку 6, на його виході встановлюється рівень логічної одиниці, що призводить до замикання ключового елемента 5, який забезпечує подачу живлення на блок 4 вентилятора, який запускається і складає додатковий обдув електродвигуна 1 завчасно, що не допускає його перегрівання. При зменшенні втрат потужності або підвищенні частоти обертання вала електродвигуна пороговий елемент 9 переключається до зворотного стану, що приводить до розмикання ключового елемента 5 і відключенню блока 4 вентилятора від мережі. Такий режим додаткового обдуву електродвигуна 1 попереджує його перегрів, а роботи блока 4 вентилятора забезпечує енергоефективний режим його використання. В випадку значного зростання втрат потужносU ті електродвигуна 1, вихідний сигнал 10 блоку 10 перевищує рівень амплітуди E 2 на другому вході порогового елемента 13 і його вихідний сигнал переходить в нульовий рівень, що приводить через елемент І 14 до відключення перетворювача частоти 3 і зупинку електродвигуна 1. Старіння електричної ізоляції приводить до зміни електричних властивостей і є сукупністю великого числа різноманітних явищ як хімічних (окислення, деполімеризація, гідроліз), так і фізичних (плавлення, розм'якшення, випаровування, наростання твердості, розтріскування, зміна міцності на розтягування). Швидкість хімічних реакцій, випаровування, дифузії і т.д. залежать від темпе 62510 10 ратури по експоненціальному закону і з цим узгоджується положення про зменшення терміну служби ізоляції удвічі при кожному підвищенні її температури на 8–10 °С. Як відомо, режими захисту електродвигуна від перевантаження ґрунтуються на його тепловій моделі, контролюючій зміну параметра добутку квадрата струму навантаження за якийсь час (I2 t ) , закладеного в програмному забезпеченні перетворювача частоти для стандартного електродвигуна і додатково на використанні термісторного датчика перегріву електродвигуна зовнішнього або вбудованого в обмотку статора. Тепловий захист електродвигуна, заснований тільки на тепловій моделі, не забезпечує стопроцентну точність, тому що температура двигуна тільки розраховується, а також не враховується зміна температури навколишнього середовища. Можливе помилкове спрацьовування термісторного датчика в результаті дії вищих гармонік напруги на виході перетворювача частоти, в загальному випадку при такому захисті є збільшення уставки спрацьовування реле захисту приблизно на 10 %. Тому застосування введених елементів 4-7, 8, 10-12 до складу пристрою захисту асинхронного електродвигуна з живленням від перетворювача частоти дозволяє підвищити надійність підтримання необхідного теплового режиму електродвигуна, уникнути порушень електромеханічного і температурного режиму при збільшенні втрат потужності електродвигуна 1 і дозволяє запобігти старінню ізоляції, порушенню протікання технологічного процесу, пов'язаного з роботою електродвигуна 1, а також підвищити ефективність і надійність його функціювання. Для використання пристрою в широкому діапазоні потужностей електродвигуна використовуються джерела постійної вхідної дії, які дозволяють просто робити настроювання на конкретну потужність електродвигуна за значеннями потужності електродвигуна 1 за допомогою джерела Е1, за значенням допустимих втрат в електродвигуні 1 за допомогою джерела Е2, номінального значення продуктивності обдуву вентилятора електродвигуна 1 за допомогою джерела Е3. Джерела інформації: 1. Патент України №7650. Дубовик В.Г., Агліулін В.Ф., Калінчик В.П. Пристрій захисту асинхронного електродвигуна від перевантаження та обриву фази. Н02Н 7/09. Бюл. №4. 26.12.95. 2. Патент України на корисну модель № 46121. Дубовик В.Г., Лебедев Л.М., Перевозник Є.П. Пристрій захисту асинхронного електродвигуна. Н02Н07/085. Бюл. №23. 10.12.2009. 11 Комп’ютерна верстка Д. Шеверун 62510 Підписне 12 Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюAsynchronous motor protection device feeded from frequency converter
Автори англійськоюDubovyk Voloymyr Hryhorovych, Dubovyk Volodymyr Hryhorovych, Lebediev Lev Mykolaiovych, Skuratovskyi Yevhen Oleksandrovych
Назва патенту російськоюУтройство защиты асинхронного электродвгателя с питанием от преобразователя частоты
Автори російськоюДубовик Владимир Григорьевич, Лебедев Лев Николаевич, Скуратовский Евгений Александрович
МПК / Мітки
МПК: H02H 7/085
Мітки: асинхронного, захисту, частоти, електродвигуна, перетворювача, пристрій, живленням
Код посилання
<a href="https://ua.patents.su/6-62510-pristrijj-zakhistu-asinkhronnogo-elektrodviguna-z-zhivlennyam-vid-peretvoryuvacha-chastoti.html" target="_blank" rel="follow" title="База патентів України">Пристрій захисту асинхронного електродвигуна з живленням від перетворювача частоти</a>
Пристрій захисту асинхронного електродвигуна
Номер патенту: 46121
Опубліковано: 10.12.2009
Автори: Лебедєв Лев Миколайович, Перевозник Євген Петрович, Дубовик Володимир Григорович
МПК: H02H 7/085
Мітки: захисту, пристрій, асинхронного, електродвигуна
Формула / Реферат:
Пристрій захисту асинхронного електродвигуна, що містить блок живлення, блок датчиків струму з датчиками, сполученими по схемі "зірка", нульова точка якої сполучена з "загальним" провідником пристрою, причому входи датчиків струму є вхідними виводами пускача, виходи якого з'єднані з асинхронним електродвигуном, блок контролю часу пуску і струму, послідовно сполучені блок контролю наявності напруги і блок порядку чергування...
Пристрій захисту асинхронного електродвигуна
Номер патенту: 37820
Опубліковано: 10.12.2008
Автори: Дубовик Володимир Григорович, Лебедєв Лев Миколайович, Масло Володимир Сергійович
МПК: H02H 7/09
Мітки: пристрій, захисту, асинхронного, електродвигуна
Формула / Реферат:
Пристрій захисту асинхронного електродвигуна, що містить блок живлення, блок датчиків струму з датчиками, з'єднаними за схемою "зірка", нульова точка якої з'єднана з "загальним" провідником пристрою, блок контролю часу пуску й струму, послідовно з'єднані блок контролю наявності напруги й блок порядку чергування фаз, блок незалежної витримки часу, три елементи І-НЕ, три джерела постійного вхідного впливу і три граничних...
Пристрій захисту асинхронного електродвигуна

Номер патенту: 46113
Опубліковано: 10.12.2009
Автори: Савченко Катерина Сергіївна, Дубовик Володимир Григорович, Лебедєв Лев Миколайович
МПК: H02H 7/00
Мітки: пристрій, захисту, асинхронного, електродвигуна
Формула / Реферат:
Пристрій захисту асинхронного електродвигуна, що містить блок живлення, блок датчиків струму з датчиками, сполученими по схемі "зірка", нульова точка якої сполучена з "загальним" провідником пристрою, причому входи датчиків струму є вхідними виводами пускача, виходи якого з'єднані з асинхронним електродвигуном, блок контролю часу пуску і струму, послідовно сполучені блок контролю наявності напруги і блок порядку чергування...
Пристрій захисту асинхронного електродвигуна
Номер патенту: 45140
Опубліковано: 26.10.2009
Автори: Перевозник Євген Петрович, Лебедєв Лев Миколайович, Дубовик Володимир Григорович
МПК: H02H 7/00
Мітки: електродвигуна, захисту, пристрій, асинхронного
Формула / Реферат:
Пристрій захисту асинхронного електродвигуна, що містить блок живлення, підключений до ланцюга живлення пускача електродвигуна і до входу ключового елемента, вихід якого підключено до котушки пускача, блок датчиків струму з датчиками, сполученими по схемі "зірка", нульова точка якої сполучена з "загальним" провідником пристрою, виходи блока датчиків струму підключені до входів блока контролю часу пуску і струму, а також...
Пристрій захисту асинхронного електродвигуна від перевантаження та обриву фази
Номер патенту: 28445
Опубліковано: 10.12.2007
Автори: Лебедєв Лев Миколайович, Дубовик Володимир Григорович
МПК: H02H 7/09
Мітки: перевантаження, пристрій, електродвигуна, асинхронного, фазі, обриву, захисту
Формула / Реферат:
1. Пристрій захисту асинхронного електродвигуна від перевантаження і обриву фази, що містить блок живлення, блок датчиків струму з датчиками, сполученими по схемі "зірка", нульова точка якої сполучена з "загальним" провідником пристрою, причому входи датчиків струму є вхідними виводами пускача, виходи якого з’єднані з асинхронним електродвигуном, блок контролю часу пуску і струму, послідовно сполучені блок контролю...
Попередній патент: Спосіб управління трафіком з підтримкою гарантій якості обслуговування в телекомунікаційній мережі
Наступний патент: Столик, що складається
Випадковий патент: Клапанний вузол видиху респіратора