Малогабаритна напівавтоматична прецизійна ділильна головка
Номер патенту: 69125
Опубліковано: 16.08.2004
Автори: Тарасов Віктор Олексійович, Зіненко Володимир Миколайович

Формула / Реферат
Малогабаритна напівавтоматична прецизійна ділильна головка, яка містить аеростатичний шпиндельний вузол, пристрій фіксації кутового положення вала аеростатичного шпиндельного вузла, пристрій вимірювання кута повороту вала аеростатичного шпиндельного вузла, яка відрізняється тим, що пристрій фіксації кутового положення вала аеростатичного шпиндельного вузла містить діафрагму, яка прикріплена до переднього торця вала аеростатичного шпиндельного вузла і розташована між притискним диском, установленим на вихідному валі ділильної головки, і переднім торцем корпуса аеростатичного шпиндельного вузла, фрикційний диск установлений між притискним диском і діафрагмою, рівномірно по колу фланця корпуса аеростатичного шпиндельного вузла виконані отвори, в яких розташовані шпильки, які укручені у притискний диск, а пружини притискного диска установлені на шпильках і стиснуті між фланцем корпуса аеростатичного шпиндельного вузла і чашками за допомогою гайок, рівномірно по колу фланця корпуса аеростатичного шпиндельного вузла установлені електромагніти відтиску притискного диска, осередя яких через отвори у фланці корпуса аеростатичного шпиндельного вузла контактують з притискним диском, пристрій вимірювання кута повороту вала аеростатичного шпиндельного вузла містить циліндр, укріплений на задньому торці вала аеростатичного шпиндельного вузла, на боковій поверхні якого виконаний паз, n плат, установлених з можливістю зміщення по колу циліндра у згаданому пазу на боковій поверхні циліндра, трикутні пластини, які установлені по дві на кожній платі вершинами одна до одної і на рівних відстанях між собою, причому пластини установлені симетрично відносно площини, яка перпендикулярна до осі обертання циліндра, два ємнісних датчики, установлені у втулці, яка прикріплена до заднього торця корпуса аеростатичного шпиндельного вузла, причому ємнісні датчики установлені у згаданій площині, яка перпендикулярна до осі обертання циліндра, причому відстань між основами ємнісних датчиків дорівнює відстаням між вершинами пластин, установлених на платах, перетворювачі ємність-напруга, компаратор, перемикач настроювання-робота, тригер, кнопку установлення тригера в одиничний стан, кнопку установлення тригера в нульовий стан, джерело живлення, електричні ключі, причому ємнісні датчики електрично зв'язані з електромагнітами відтиску притискного диска пристрою фіксації кутового положення вала аеростатичного шпиндельного вузла, причому ємнісні датчики з'єднані з перетворювачами ємність-напруга, перетворювачі ємність-напруга з'єднані з входами компаратора, вихід компаратора через перемикач настроювання-робота з'єднаний з одиничним входом тригера, а нульовий вхід тригера через кнопку установлення тригера в нульовий стан з’єднаний з джерелом живлення, одиничний вихід тригера з’єднаний з першими входами електронних ключів, а джерело живлення з'єднано з другими входами електронних ключів, виходи електронних ключів з'єднанні з електромагнітами відтиску притискного диска, джерело живлення з'єднано з перемикачем настроювання-робота, перемикач настроювання-робота через кнопку установлення тригера в одиничний стан з'єднаний з одиничним входом тригера.
Текст
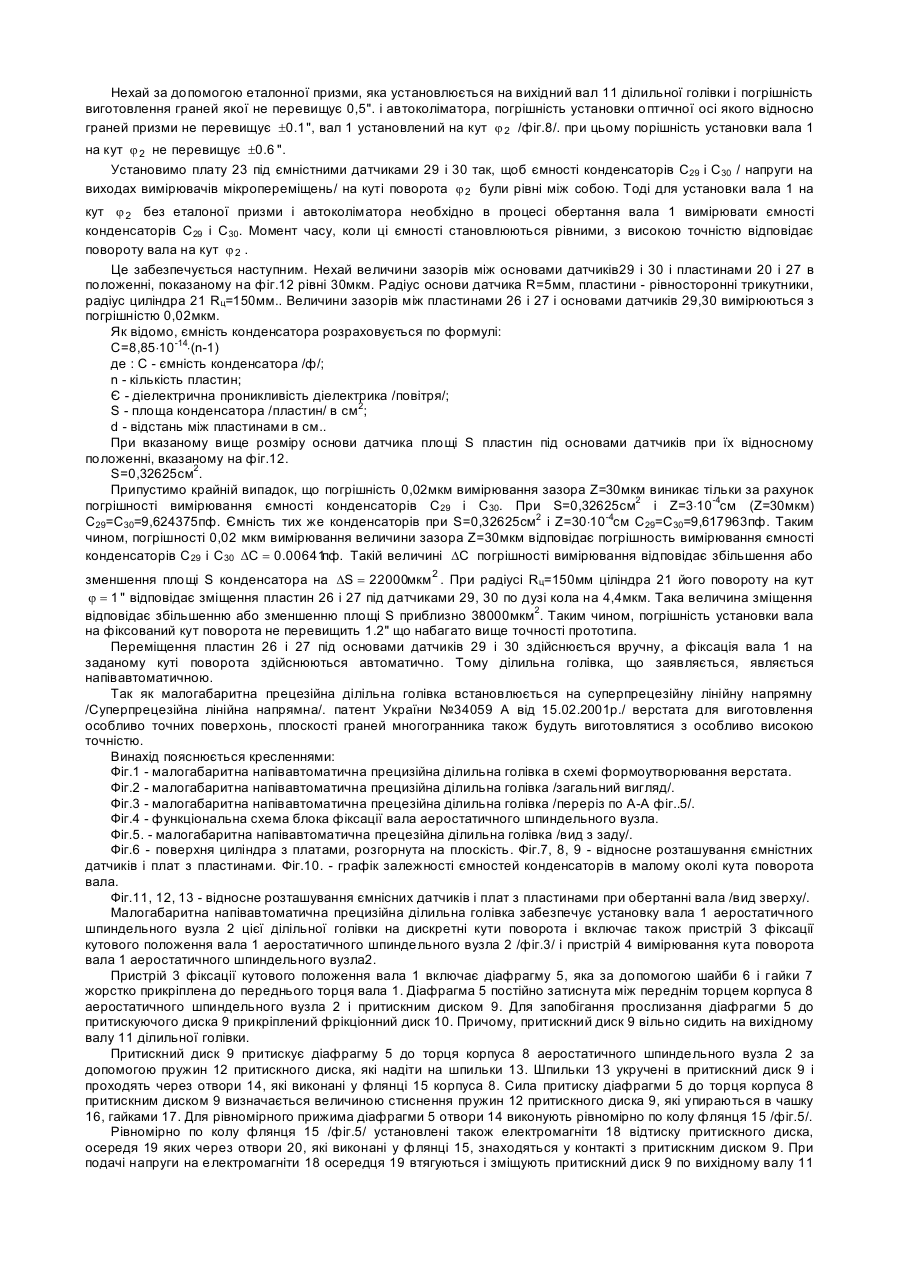
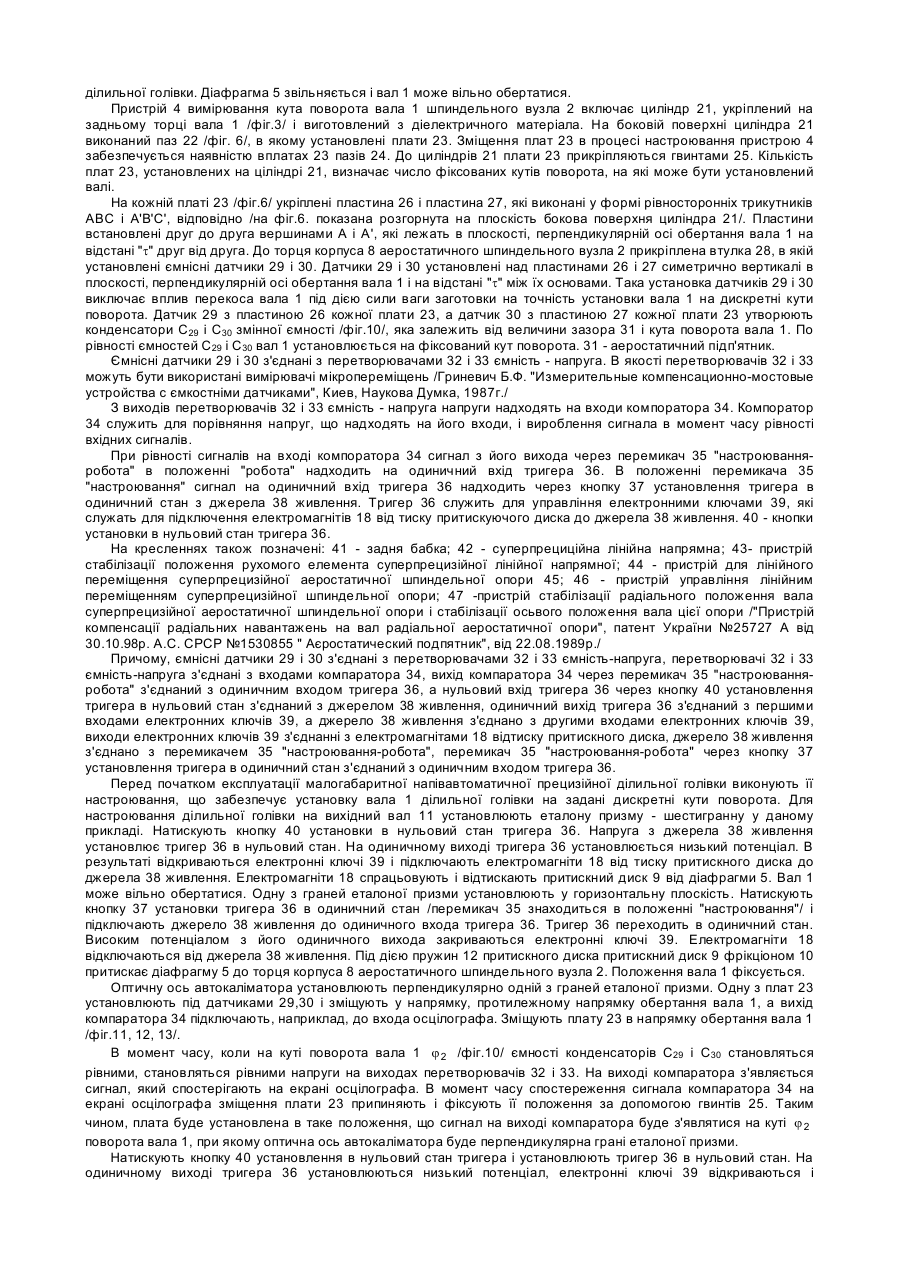
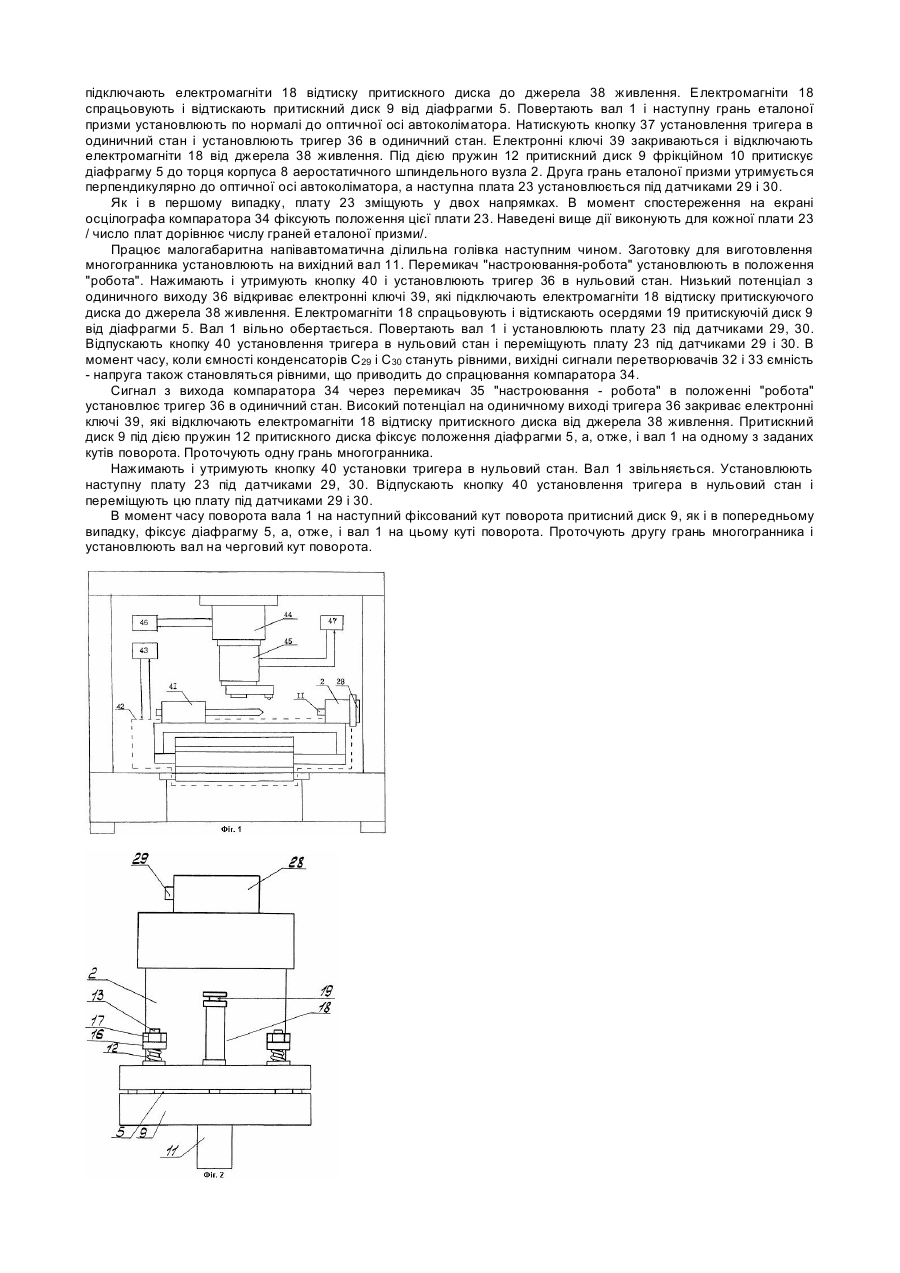
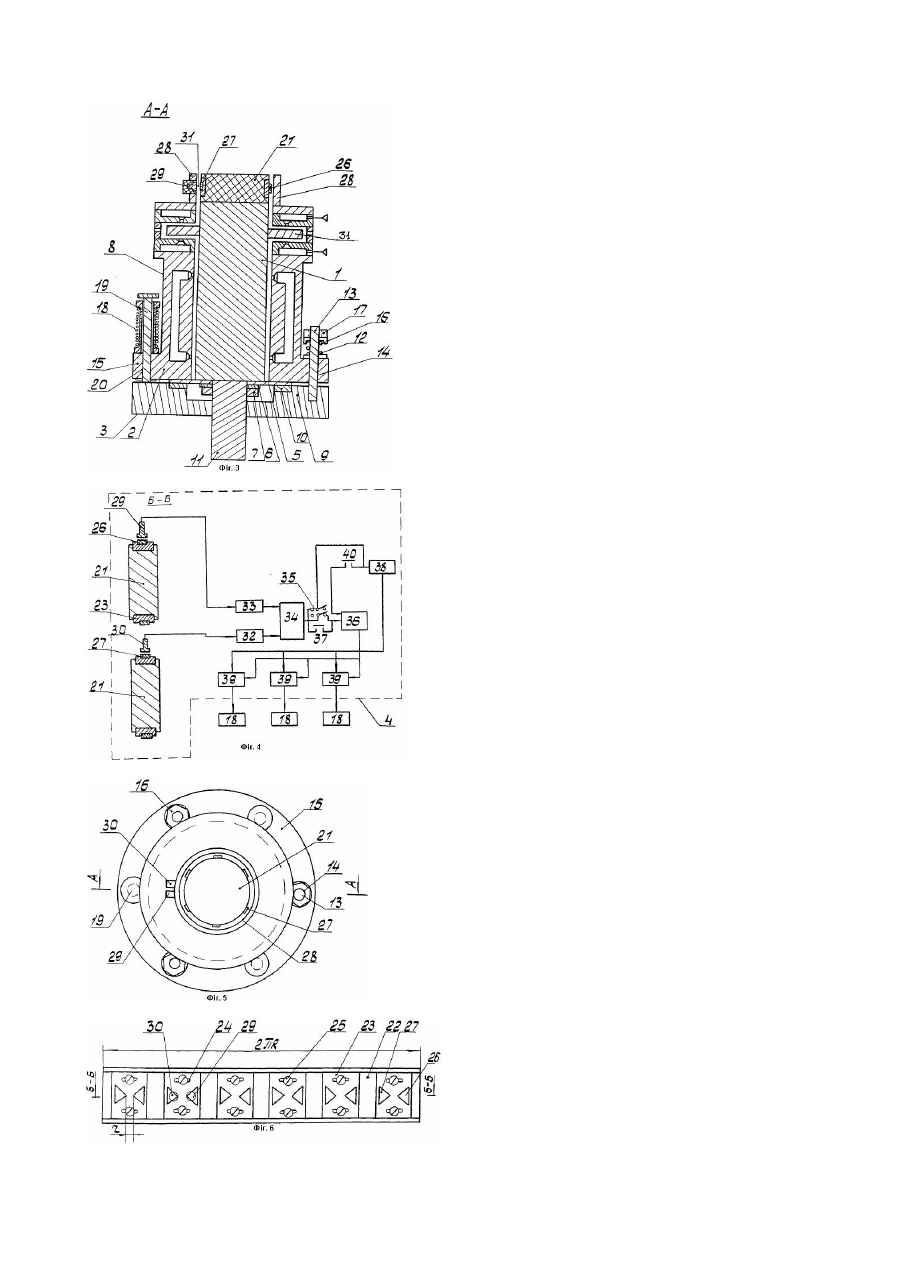
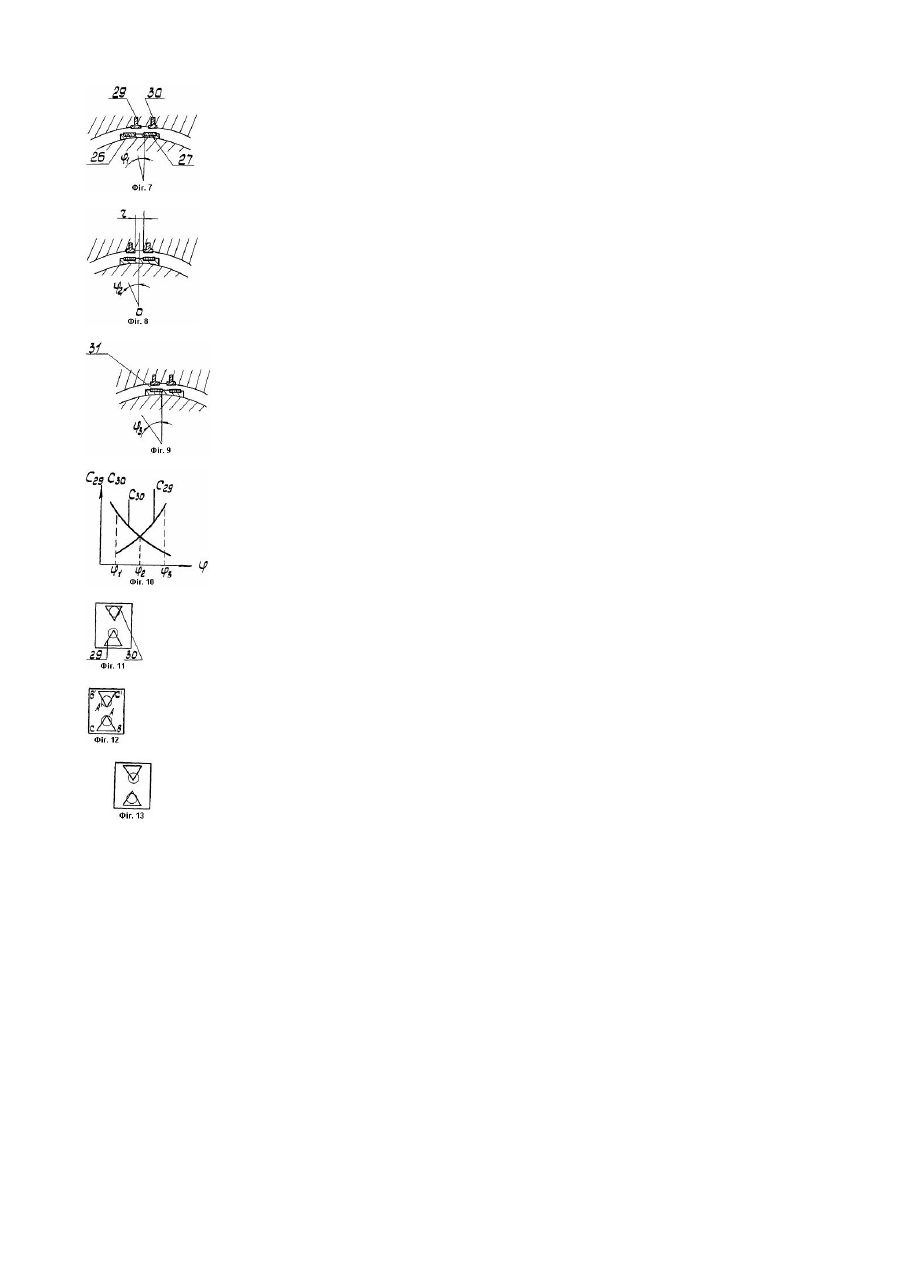
Винахід відноситься до верстатобудування і може бути використаний в якості елемента формоутворюючої системи верстата для виготовлення прецизійних багатогранників, наприклад, для лазерних принтерів. Відома оптична ділильна голівка ОДГ- 60, яка виготовляється Новосибірським приборобудівним заводом. Ця ділильна голівка призначена для виконання кутових вимірів и ділильних робіт з допустимою погрішністю, яка не перевищує 20" (див. паспорт на ОДГ-60, Новосибірський приборобудівний завод М.Новосибірськ, 1963р). В склад ОДГ-60 входять: ділильна голівка, освітлювач, станина, задня бабка. Основним елементом ОДГ-60 являється ділильна голівка, яка включає шпиндельний вузол, магнітний затискач для фіксації вала шпиндельного вузла, а також оптичну систему для вимірювання кута поворота вала шпиндельного вузла. Оптична ділильна голівка ОДГ-60 вибрана в якості прототипа. Ділильна голівка прототипа не може використовуватися в якості елемента формоутворюючої системи верстата так як має великі габарити і вагу. Так маса ділильної голівки складає 76кг., а маса станини - 230кг. Малогабаритна напівавтоматична прецизійна ділильна голівка, що заявляється, може бути виконана у вигляді циліндра з радіусом Rц=/5¸10/см, довжиною Lц=/20¸25/см і масою, яка не перевищує 10кг. Це дозволяє цю ділильну голівку установлювати, наприклад, на лінійну напрямну верстата для виготовлення плоских поверхонь /фіг.1/ і додатково виготовляти на цьому верстаті прецизійні багатогранники. Задача, що вирішується, полягає в розробці малогабаритної напівавтоматичної прецизійної ділильної голівки, яка може в якості додаткового елемента формоутворюючої системи установлюватися на існуючі верстати для виготовлення на них багатогранників, шляхом заміни оптичної вимірювальної системи на високоточну компактну електронну систему вимірювання кута поворота вала шпиндельного вузла з ємністними датчиками, а установка вала шпиндельного вузла якої на фіксовані кути поворота виконується в напівавтоматичному режимі. Вирішення цієї задачі досягається тим, що малогабаритна напівавтоматична прецизійна ділильна голівка, яка включає аеростатичний шпиндельний вузол, пристрій фіксації кутового положення вала аеростатичного шпиндельного вузла, пристрій вимірювання кута поворота вала аеростатичного шпиндельного вузла, згідно винаходу, пристрій фіксації кутового положення вала аеростатичного шпиндельного вузла включає діафрагму, яка прикріплена до переднього торця вала аеростатичного шпиндельного вузла і розташована між притискним диском, установленому на вихідному валу ділильної голівки, і переднім торцем корпуса аеростатичного шпиндельного вузла, а фракційний диск установлений між притисним диском і діафрагмою, рівномірно по колу флянця корпуса аеростатичного шпиндельного вузла виконані отвори в яких розташовані шпильки, які укручені у притискний диск, а пружини притискного диска установлені на шпильках і стиснуті між флянцем корпуса аеростатичного шпиндельного вузла і чашками за допомогою гайок, рівномірно по колу флянця корпуса аеростатичного шпиндельного вузла установлені електромагніти відтиску притискного диска, осердя яких через отвори у флянці корпуса аеростатичного шпиндельного вузла контактують з притискним диком, пристрій вимірювання кута поворота вала аеростатичного шпиндельного вузла містить циліндр, укріплений на задньому торці вала аеростатичного шпиндельного вула, на боковій поверхні якого виконані паз, "n" плат, установлених з можливістю зміщення по колу ціліндра у згаданому пазу на боковій поверхні ціліндра, трикутні пластини, які установлені по дві на кожній платі вершинами друг до друга і на рівних відстанях між ними, причому, пластини установлені симетрично відносно плоскості, яка перпендикулярна до осі обертання ціліндра, два ємнісних датчика, установлених у втулці, яка прикріплена до заднього торця корпуса аеростатичного шпиндельного вузла, причому, ємнісні датчики установлені у згаданій плоскості, яка перпендикулярна осі обертання циліндра, причому, відстань між основами ємністних датчиків дорівнює відстанням між вершинами пластин, установлених на платах, перетворювачі ємність - напруга, компаратор, перемикач "настроювання-робота", тригер, кнопку установлення тригера в одиничний стан, кнопку установлення тригера в нульовий стан, джерело живлення, електричні ключі, причому, ємнісні датчики електричне зв’язані з електромагнітами відтиску притискного диска пристрою фіксації кутового положення вала аеростатичного шпиндельного вузла, причому, ємнісні датчики з'єднані з перетворювачами ємність-напруга, перетворювачі ємність-напруга з'єднані з входами компаратора, вихід компаратора через перемикач "настроювання-робота" з’єднаний з одиничним входом тригера, а нульовий вхід тригера через кнопку установлення тригера в нульовий стан з’єднаний з джерелом живлення, одиничний вихід тригера з’єднаний з першими входами електронних ключів, а джерело живлення з’єднано з другими входами електронних ключів, виходи електронних ключів з'єднанні з електромагнітами відтиску притискного диска, джерело живлення з'єднано з перемикачем "настроювання-робота", перемикач "настроювання-робота" через кнопку установлення тригера в одиничний стан з'єднаний з одиничним входом тригера. Причинно-наслідковий зв’язок між сукупністю суттєвих ознак винаходу, що заявляється, і досягаємим технічним результатом полягає у наступному. На фіг.2 показана малогабаритна напівавтоматична прецизійна ділильна голівка, осьовий переріз якої показаний на фіг.3, а пристрій вимірювання кута поворота вала аеростатичного шпиндельного вузла ділильної голівки показаний на фіг.4. Пристрій вимірювання кута поворота вала аеростатичного шиндельного вузла цієї ділильної голівки представляє собою високоточну електронну систему, принцип роботи якої полягає в наступному. Основними елементами цієї системи є циліндр 21 /фіг. 3/ з встановленими на ньому платами 23, укріплений на задньому торці вала 1 аеростатичного шпиндельного вузла 2, ємнісні датчики 29 і 30 /фіг.3, 5/ установлені у втулці 28, яка закріплена на задньому торці корпуса 8 аеростатичного шпиндельного вузла 2. На кожній платі 23 /фіг.6/ укріплені по дві трикутні пластини 26 і 27. Положення цих пластин під датчиками 29 і 30 при обертанні вала 1 показано на фіг.7. Основа датчика 29 і пластина 26 утворює кондесатор C29, основа датчика 30 і пластина 27 утворює кондесатор С30 /фіг.8/. Для порівняння ємностей конденсаторів C29 і С30, які змінюються при обертанні вала 1, ємності перетворюються у пропорційну цим ємностям напругу. В якості перетворювачів ємнісь-напруга використовується вимірювачі мікропереміщень /Гриневич Б.Ф. "Измерительные компенсационно-мостовые устройства с емкостными датчиками", Киев, Наукова Думка, 1978г./ Погрішність цих вимірювачів не перевішує /0,1-0,01%/ величини мікропереміщення /величини зазора, що вимірюється/. Таким чином, фіксованому куту поворота вала 1 при фіксованому положенні плати 23 на циліндрі 21, коли пластини 26 і 27 знаходяться під основами датчиків 29 і 30, відповідає співвідношення напруг на виходах вимірювачів мікропереміщень або їх рівність як у випадку, що розглядається. Нехай за допомогою еталонної призми, яка установлюється на вихідний вал 11 ділильної голівки і погрішність виготовлення граней якої не перевищує 0,5". і автоколіматора, погрішність установки оптичної осі якого відносно граней призми не перевищує ±0 .1 ", вал 1 установлений на кут j 2 /фіг.8/. при цьому порішність установки вала 1 на кут j 2 не перевищує ±0 .6 ". Установимо плату 23 під ємністними датчиками 29 і 30 так, щоб ємності конденсаторів С29 і С30 / напруги на виходах вимірювачів мікропереміщень/ на куті поворота j 2 були рівні між собою. Тоді для установки вала 1 на кут j 2 без еталоної призми і автоколіматора необхідно в процесі обертання вала 1 вимірювати ємності конденсаторів С29 і С30. Момент часу, коли ці ємності становлюються рівними, з високою точністю відповідає повороту вала на кут j 2 . Це забезпечується наступним. Нехай величини зазорів між основами датчиків29 і 30 і пластинами 20 і 27 в положенні, показаному на фіг.12 рівні 30мкм. Радіус основи датчика R=5мм, пластини - рівносторонні трикутники, радіус циліндра 21 Rц=150мм.. Величини зазорів між пластинами 26 і 27 і основами датчиків 29,30 вимірюються з погрішністю 0,02мкм. Як відомо, ємність конденсатора розраховується по формулі: С=8,85×10-14×(n-1) де : С - ємність конденсатора /ф/; n - кількість пластин; Є - діелектрична проникливість діелектрика /повітря/; S - площа конденсатора /пластин/ в см2; d - відстань між пластинами в см.. При вказаному вище розміру основи датчика площі S пластин під основами датчиків при їх відносному положенні, вказаному на фіг.12. S=0,32625см2. Припустимо крайній випадок, що погрішність 0,02мкм вимірювання зазора Z=30мкм виникає тільки за рахунок погрішності вимірювання ємності конденсаторів С29 і С30. При S=0,32625см2 і Z=3×10-4см (Z=30мкм) С29= С30=9,624375пф. Ємність тих же конденсаторів при S=0,32625см2 і Z=30×10-4см С29=С30=9,617963пф. Таким чином, погрішності 0,02 мкм вимірювання величини зазора Z=30мкм відповідає погрішность вимірювання ємності конденсаторів С 29 і С30 DC = 0 .00641 . Такій величині DС погрішності вимірювання відповідає збільшення або пф зменшення площі S конденсатора на DS = 22000мкм 2 . При радіусі Rц=150мм ціліндра 21 його повороту на кут j = 1 " відповідає зміщення пластин 26 і 27 під датчиками 29, 30 по дузі кола на 4,4мкм. Така величина зміщення відповідає збільшенню або зменшенню площі S приблизно 38000мкм2. Таким чином, погрішність установки вала на фіксований кут поворота не перевищить 1.2" що набагато вище точності прототипа. Переміщення пластин 26 і 27 під основами датчиків 29 і 30 здійснюється вручну, а фіксація вала 1 на заданому куті поворота здійснюються автоматично. Тому ділильна голівка, що заявляється, являється напівавтоматичною. Так як малогабаритна прецезійна ділільна голівка встановлюється на суперпрецезійну лінійну напрямну /Суперпрецезійна лінійна напрямна/. патент України №34059 А від 15.02.2001р./ верстата для виготовлення особливо точних поверхонь, плоскості граней многогранника також будуть виготовлятися з особливо високою точністю. Винахід пояснюється кресленнями: Фіг.1 - малогабаритна напівавтоматична прецизійна ділильна голівка в схемі формоутворювання верстата. Фіг.2 - малогабаритна напівавтоматична прецизійна ділильна голівка /загальний вигляд/. Фіг.3 - малогабаритна напівавтоматична прецезійна ділильна голівка /переріз по А-А фіг..5/. Фіг.4 - функціональна схема блока фіксації вала аеростатичного шпиндельного вузла. Фіг.5. - малогабаритна напівавтоматична прецезійна ділильна голівка /вид з заду/. Фіг.6 - поверхня циліндра з платами, розгорнута на плоскість. Фіг.7, 8, 9 - відносне розташування ємністних датчиків і плат з пластинами. Фіг.10. - графік залежності ємностей конденсаторів в малому околі кута поворота вала. Фіг.11, 12, 13 - відносне розташування ємнісних датчиків і плат з пластинами при обертанні вала /вид зверху/. Малогабаритна напівавтоматична прецизійна ділильна голівка забезпечує установку вала 1 аеростатичного шпиндельного вузла 2 цієї ділільної голівки на дискретні кути поворота і включає також пристрій 3 фіксації кутового положення вала 1 аеростатичного шпиндельного вузла 2 /фіг.3/ і пристрій 4 вимірювання кута поворота вала 1 аеростатичного шпиндельного вузла2. Пристрій 3 фіксації кутового положення вала 1 включає діафрагму 5, яка за допомогою шайби 6 і гайки 7 жорстко прикріплена до переднього торця вала 1. Діафрагма 5 постійно затиснута між переднім торцем корпуса 8 аеростатичного шпиндельного вузла 2 і притискним диском 9. Для запобігання прослизання діафрагми 5 до притискуючого диска 9 прикріплений фрікціонний диск 10. Причому, притискний диск 9 вільно сидить на вихідному валу 11 ділильної голівки. Притискний диск 9 притискує діафрагму 5 до торця корпуса 8 аеростатичного шпиндельного вузла 2 за допомогою пружин 12 притискного диска, які надіти на шпильки 13. Шпильки 13 укручені в притискний диск 9 і проходять через отвори 14, які виконані у флянці 15 корпуса 8. Сила притиску діафрагми 5 до торця корпуса 8 притискним диском 9 визначається величиною стиснення пружин 12 притискного диска 9, які упираються в чашку 16, гайками 17. Для рівномірного прижима діафрагми 5 отвори 14 виконують рівномірно по колу флянця 15 /фіг.5/. Рівномірно по колу флянця 15 /фіг.5/ установлені також електромагніти 18 відтиску притискного диска, осередя 19 яких через отвори 20, які виконані у флянці 15, знаходяться у контакті з притискним диском 9. При подачі напруги на електромагніти 18 осередця 19 втягуються і зміщують притискний диск 9 по вихідному валу 11 ділильної голівки. Діафрагма 5 звільняється і вал 1 може вільно обертатися. Пристрій 4 вимірювання кута поворота вала 1 шпиндельного вузла 2 включає циліндр 21, укріплений на задньому торці вала 1 /фіг.3/ і виготовлений з діелектричного матеріала. На боковій поверхні циліндра 21 виконаний паз 22 /фіг. 6/, в якому установлені плати 23. Зміщення плат 23 в процесі настроювання пристрою 4 забезпечується наявністю вплатах 23 пазів 24. До циліндрів 21 плати 23 прикріпляються гвинтами 25. Кількість плат 23, установлених на ціліндрі 21, визначає число фіксованих кутів поворота, на які може бути установлений валі. На кожній платі 23 /фіг.6/ укріплені пластина 26 і пластина 27, які виконані у формі рівносторонніх трикутників АВС і А'В'С', відповідно /на фіг.6. показана розгорнута на плоскість бокова поверхня циліндра 21/. Пластини встановлені друг до друга вершинами А і А', які лежать в плоскості, перпендикулярній осі обертання вала 1 на відстані "t" друг від друга. До торця корпуса 8 аеростатичного шпиндельного вузла 2 прикріплена втулка 28, в якій установлені ємнісні датчики 29 і 30. Датчики 29 і 30 установлені над пластинами 26 і 27 симетрично вертикалі в плоскості, перпендикулярній осі обертання вала 1 і на відстані "t" між їх основами. Така установка датчиків 29 і 30 виключає вплив перекоса вала 1 під дією сили ваги заготовки на точність установки вала 1 на дискретні кути поворота. Датчик 29 з пластиною 26 кожної плати 23, а датчик 30 з пластиною 27 кожної плати 23 утворюють конденсатори С29 i С30 змінної ємності /фіг.10/, яка залежить від величини зазора 31 і кута поворота вала 1. По рівності ємностей C29 і С30 вал 1 установлюється на фіксований кут поворота. 31 - аеростатичний підп'ятник. Ємнісні датчики 29 і 30 з'єднані з перетворювачами 32 і 33 ємність - напруга. В якості перетворювачів 32 і 33 можуть бути використані вимірювачі мікропереміщень /Гриневич Б.Ф. "Измерительные компенсационно-мостовые устройства с ємкостніми датчиками", Киев, Наукова Думка, 1987г./ З виходів перетворювачів 32 і 33 ємність - напруга напруги надходять на входи компоратора 34. Компоратор 34 служить для порівняння напруг, що надходять на його входи, і вироблення сигнала в момент часу рівності вхідних сигналів. При рівності сигналів на вході компоратора 34 сигнал з його вихода через перемикач 35 "настроюванняробота" в положенні "робота" надходить на одиничний вхід тригера 36. В положенні перемикача 35 "настроювання" сигнал на одиничний вхід тригера 36 надходить через кнопку 37 установлення тригера в одиничний стан з джерела 38 живлення. Тригер 36 служить для управління електронними ключами 39, які служать для підключення електромагнітів 18 від тиску притискуючого диска до джерела 38 живлення. 40 - кнопки установки в нульовий стан тригера 36. На кресленнях також позначені: 41 - задня бабка; 42 - суперпрециційна лінійна напрямна; 43- пристрій стабілізації положення рухомого елемента суперпрецизійної лінійної напрямної; 44 - пристрій для лінійного переміщення суперпрецизійної аеростатичної шпиндельної опори 45; 46 - пристрій управління лінійним переміщенням суперпрецизійної шпиндельної опори; 47 -пристрій стабілізації радіального положення вала суперпрецизійної аеростатичної шпиндельної опори і стабілізації осьвого положення вала цієї опори /"Пристрій компенсації радіальних навантажень на вал радіальної аеростатичної опори", патент України №25727 А від 30.10.98р. А.С. СРСР №1530855 " Аєростатический подпятник", від 22.08.1989р./ Причому, ємнісні датчики 29 і 30 з'єднані з перетворювачами 32 і 33 ємність-напруга, перетворювачі 32 і 33 ємність-напруга з'єднані з входами компаратора 34, вихід компаратора 34 через перемикач 35 "настроюванняробота" з'єднаний з одиничним входом тригера 36, а нульовий вхід тригера 36 через кнопку 40 установлення тригера в нульовий стан з'єднаний з джерелом 38 живлення, одиничний вихід тригера 36 з'єднаний з першими входами електронних ключів 39, а джерело 38 живлення з'єднано з другими входами електронних ключів 39, виходи електронних ключів 39 з'єднанні з електромагнітами 18 відтиску притискного диска, джерело 38 живлення з'єднано з перемикачем 35 "настроювання-робота", перемикач 35 "настроювання-робота" через кнопку 37 установлення тригера в одиничний стан з'єднаний з одиничним входом тригера 36. Перед початком експлуатації малогабаритної напівавтоматичної прецизійної ділильної голівки виконують її настроювання, що забезпечує установку вала 1 ділильної голівки на задані дискретні кути поворота. Для настроювання ділильної голівки на вихідний вал 11 установлюють еталону призму - шестигранну у даному прикладі. Натискують кнопку 40 установки в нульовий стан тригера 36. Напруга з джерела 38 живлення установлює тригер 36 в нульовий стан. На одиничному виході тригера 36 установлюється низький потенціал. В результаті відкриваються електронні ключі 39 і підключають електромагніти 18 від тиску притискного диска до джерела 38 живлення. Електромагніти 18 спрацьовують і відтискають притискний диск 9 від діафрагми 5. Вал 1 може вільно обертатися. Одну з граней еталоної призми установлюють у горизонтальну плоскість. Натискують кнопку 37 установки тригера 36 в одиничний стан /перемикач 35 знаходиться в положенні "настроювання"/ і підключають джерело 38 живлення до одиничного входа тригера 36. Тригер 36 переходить в одиничний стан. Високим потенціалом з його одиничного вихода закриваються електронні ключі 39. Електромагніти 18 відключаються від джерела 38 живлення. Під дією пружин 12 притискного диска притискний диск 9 фрікціоном 10 притискає діафрагму 5 до торця корпуса 8 аеростатичного шпиндельного вузла 2. Положення вала 1 фіксується. Оптичну ось автокаліматора установлюють перпендикулярно одній з граней еталоної призми. Одну з плат 23 установлюють під датчиками 29,30 і зміщують у напрямку, протилежному напрямку обертання вала 1, а вихід компаратора 34 підключають, наприклад, до входа осцілографа. Зміщують плату 23 в напрямку обертання вала 1 /фіг.11, 12, 13/. В момент часу, коли на куті поворота вала 1 j 2 /фіг.10/ ємності конденсаторів С29 і С30 становляться рівними, становляться рівними напруги на виходах перетворювачів 32 і 33. На виході компаратора з'являється сигнал, який спостерігають на екрані осцілографа. В момент часу спостереження сигнала компаратора 34 на екрані осцілографа зміщення плати 23 припиняють і фіксують її положення за допомогою гвинтів 25. Таким чином, плата буде установлена в таке положення, що сигнал на виході компаратора буде з'являтися на куті j 2 поворота вала 1, при якому оптична ось автокаліматора буде перпендикулярна грані еталоної призми. Натискують кнопку 40 установлення в нульовий стан тригера і установлюють тригер 36 в нульовий стан. На одиничному виході тригера 36 установлюються низький потенціал, електронні ключі 39 відкриваються і підключають електромагніти 18 відтиску притискного диска до джерела 38 живлення. Електромагніти 18 спрацьовують і відтискають притискний диск 9 від діафрагми 5. Повертають вал 1 і наступну грань еталоної призми установлюють по нормалі до оптичної осі автоколіматора. Натискують кнопку 37 установлення тригера в одиничний стан і установлюють тригер 36 в одиничний стан. Електронні ключі 39 закриваються і відключають електромагніти 18 від джерела 38 живлення. Під дією пружин 12 притискний диск 9 фрікційном 10 притискує діафрагму 5 до торця корпуса 8 аеростатичного шпиндельного вузла 2. Друга грань еталоної призми утримується перпендикулярно до оптичної осі автоколіматора, а наступна плата 23 установлюється під датчиками 29 і 30. Як і в першому випадку, плату 23 зміщують у двох напрямках. В момент спостереження на екрані осцілографа компаратора 34 фіксують положення цієї плати 23. Наведені вище дії виконують для кожної плати 23 / число плат дорівнює числу граней еталоної призми/. Працює малогабаритна напівавтоматична ділильна голівка наступним чином. Заготовку для виготовлення многогранника установлюють на вихідний вал 11. Перемикач "настроювання-робота" установлюють в положення "робота". Нажимають і утримують кнопку 40 і установлюють тригер 36 в нульовий стан. Низький потенціал з одиничного виходу 36 відкриває електронні ключі 39, які підключають електромагніти 18 відтиску притискуючого диска до джерела 38 живлення. Електромагніти 18 спрацьовують і відтискають осердями 19 притискуючій диск 9 від діафрагми 5. Вал 1 вільно обертається. Повертають вал 1 і установлюють плату 23 під датчиками 29, 30. Відпускають кнопку 40 установлення тригера в нульовий стан і переміщують плату 23 під датчиками 29 і 30. В момент часу, коли ємності конденсаторів С29 і С30 стануть рівними, вихідні сигнали перетворювачів 32 і 33 ємність - напруга також становляться рівними, що приводить до спрацювання компаратора 34. Сигнал з вихода компаратора 34 через перемикач 35 "настроювання - робота" в положенні "робота" установлює тригер 36 в одиничний стан. Високий потенціал на одиничному виході тригера 36 закриває електронні ключі 39, які відключають електромагніти 18 відтиску притискного диска від джерела 38 живлення. Притискний диск 9 під дією пружин 12 притискного диска фіксує положення діафрагми 5, а, отже, і вал 1 на одному з заданих кутів поворота. Проточують одну грань многогранника. Нажимають і утримують кнопку 40 установки тригера в нульовий стан. Вал 1 звільняється. Установлюють наступну плату 23 під датчиками 29, 30. Відпускають кнопку 40 установлення тригера в нульовий стан і переміщують цю плату під датчиками 29 і 30. В момент часу поворота вала 1 на наступний фіксований кут поворота притисний диск 9, як і в попередньому випадку, фіксує діафрагму 5, а, отже, і вал 1 на цьому куті поворота. Проточують другу грань многогранника і установлюють вал на черговий кут поворота.
ДивитисяДодаткова інформація
Назва патенту англійськоюSmall-size semiautomatic precision indexing head
Автори англійськоюTarasov Viktor Oleksiiovych, Zinenko Volodymyr Mykolaiovych
Назва патенту російськоюМалогабаритная полуавтоматическая прецизионная делительная головка
Автори російськоюТарасов Виктор Алексеевич, Зиненко Владимир Николаевич
МПК / Мітки
МПК: B23B 41/00
Мітки: напівавтоматична, малогабаритна, головка, прецизійна, ділильна
Код посилання
<a href="https://ua.patents.su/6-69125-malogabaritna-napivavtomatichna-precizijjna-dililna-golovka.html" target="_blank" rel="follow" title="База патентів України">Малогабаритна напівавтоматична прецизійна ділильна головка</a>
Hожова головка кутера
Номер патенту: 711
Опубліковано: 15.12.1993
Автор: Михаел Штеффенс
МПК: B02C 18/20
Мітки: головка, кутера, hожова
Формула / Реферат:
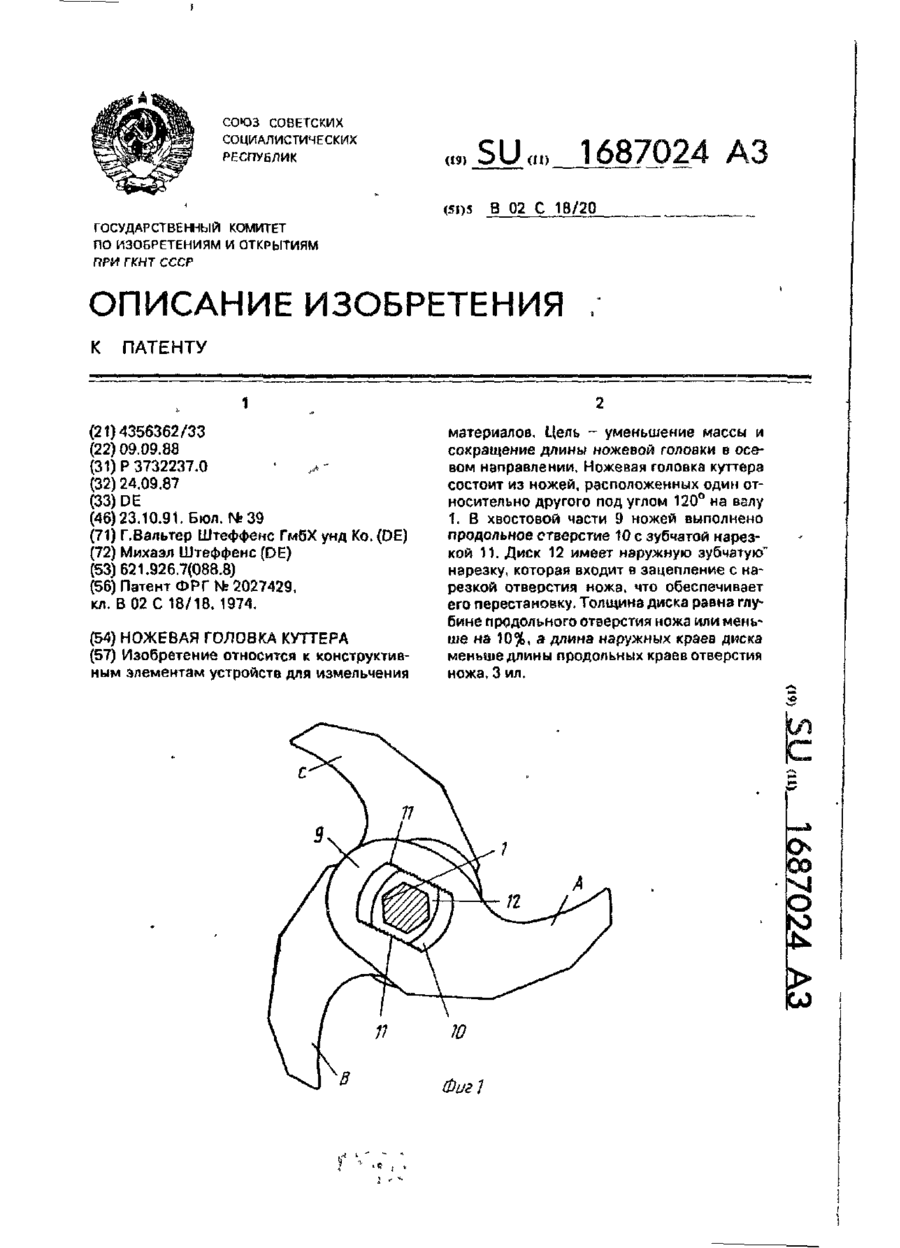
Ножевая головка куттера, содержащая по меньшей мере два установленных с уравновешиванием масс относительно ее оси вращения ножа, каждый из которых имеет продольное отверстие в хвостовой части и по меньшей мере один режущий участок, диск для приема вала с центральным отверстием в виде правильного многоугольника и зубчатую нарезку на противоположных параллельных продольных краях диска, которая входит в зацепление с соответствующей зубчатой...
Машинка закатна напівавтоматична для закупорки скляних банок металевими кришками
Номер патенту: 60660
Опубліковано: 15.10.2003
Автор: Котюхов Микола Вікторович
МПК: B67B 3/00
Мітки: скляних, машинка, металевими, закупорки, кришками, напівавтоматична, банок, закатна
Формула / Реферат:
1. Машинка закатна напівавтоматична для закупорки скляних банок металевими кришками, яка містить диск з віссю та ручкою, установлену на осі диска обертову рукоятку з розміщеним на ній роликом та механізм переміщення ролика, яка відрізняється тим, що механізм переміщення ролика виконаний у вигляді послідовно з'єднаних зубчатого планетарного механізму переривчастого руху, який перетворює постійний обертальний рух рукоятки в переривчастий...
Малогабаритна рамкова антена

Номер патенту: 40217
Опубліковано: 16.07.2001
Автори: Посний Олег Олександрович, Іванов Георгій Анатолійович, Проценко Михайло Борисович, Лобкова Любов Михайлівна, Васильєв Олександр Миколайович, Громоздін Валентин Володимирович
МПК: H01Q 7/00
Мітки: малогабаритна, рамкова, антена
Формула / Реферат:
Малогабаритна рамкова антена, що містить рамковий випромінювач, лінію живлення, активний опір, причому лінія живлення та активний опір підключені до протилежних сторін рамкового випромінювача, яка відрізняється тим, що послідовно активному опору включена ємність, причому периметр рамкового випромінювача L еквівалентний діаметру провідника рамкового випромінювача D, номінальні значення активного опору R та ємності С вибрані згідно з...
Ограоча головка
Номер патенту: 533
Опубліковано: 15.12.1993
Автори: Ласкін Валентин Пилипович, Д'яков Микола Борисович, Почтаренко Олександр Георгійович
МПК: B28D 5/00
Формула / Реферат:
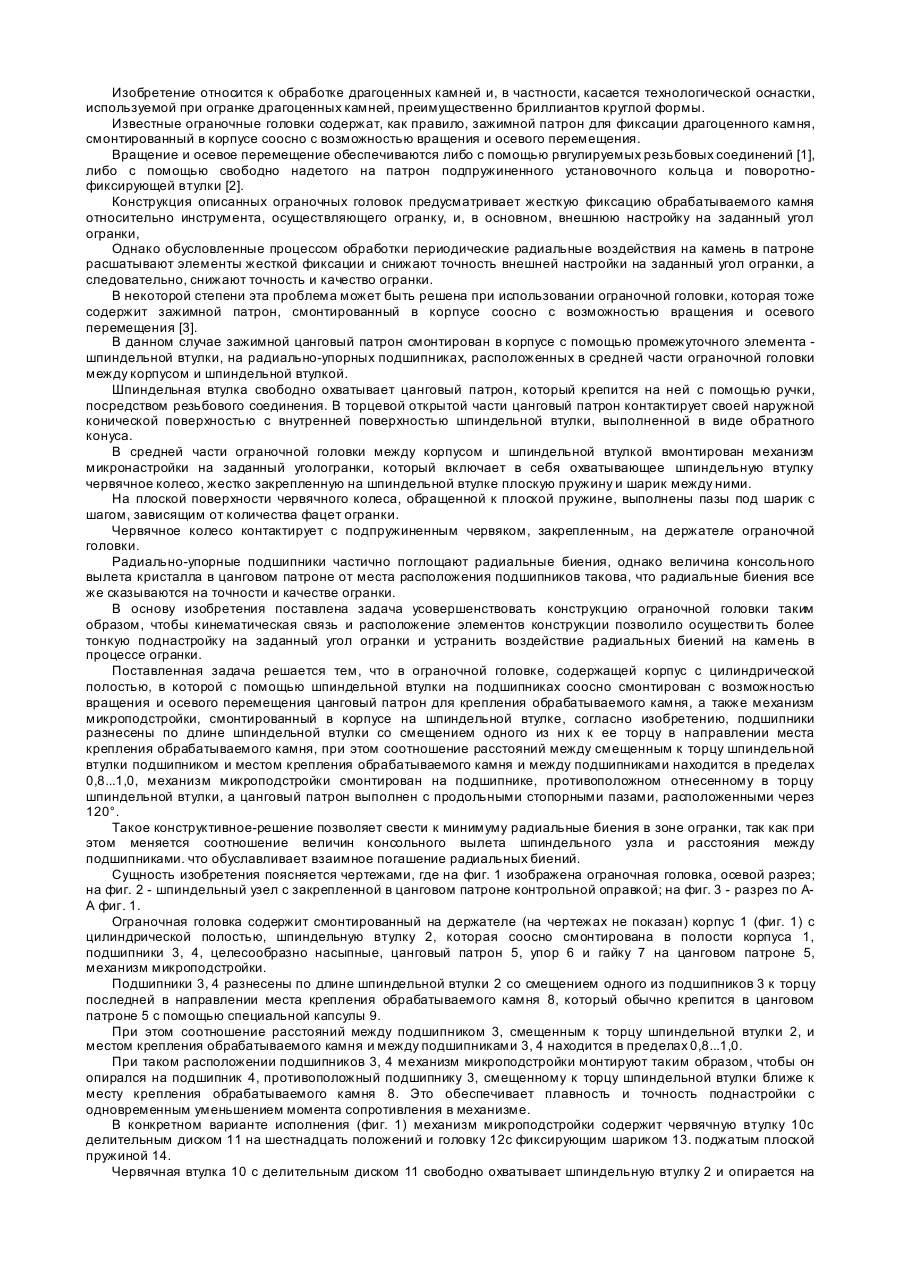
Ограночная головка, содержащая корпус с цилиндрической полостью, в которой с помощью шпиндельной втулки на подшипниках соосно смонтирован с возможностью вращения и осевого перемещения цанговый патрон для крепления обрабатываемого камня, а также механизм микроподстройки, смонтированный в корпусе на шпиндельной втулке, отличающаяся тем, что подшипники разнесены подлине шпиндельной втулки со смещением одного из них к ее торцу в направлении...
Малогабаритна шафа комплектного розподільчого пристрою з повітряною ізоляцією
Номер патенту: 42512
Опубліковано: 15.10.2001
Автори: Дмитрук Ярослав Володимирович, Мельник Роман Іванович, Цимбалюк Леонід Мойсейович, Мельник Ярослав Володимирович
МПК: H02B 13/02
Мітки: розподільчого, повітряною, ізоляцією, малогабаритна, шафа, комплектного, пристрою
Формула / Реферат:
1. Малогабаритна шафа комплектного розподільчого пристрою з повітряною ізоляцією, що містить каркас, релейний відсік, відсік збірних шин з вакуумним вимикачем, відсік трансформаторів струму з розміщеними на них мідними стержнями та відсік кабельних розводів, яка відрізняється тим, що вказана шафа з повітряною ізоляцією та мінімальними габаритами по ширині оснащена високовольтною апаратурою, встановленою в вертикальній площині шафи, в якій...
Попередній патент: Кавітаційний змішувач
Наступний патент: Спосіб стабілізації радіального положення осі обертання вала аеростатичної шпиндельної опори
Випадковий патент: Спосіб очищення стічних вод від важких металів