Цифровий автоматичний коерцитиметр

Формула / Реферат
Цифровий автоматичний коерцитиметр, що містить котушку Гельмгольца, генератор лінійного струму, блок керування, пороговий блок, елемент І, лічильник імпульсів, цифровий індикатор, тригер, генератор тактових імпульсів, дільник імпульсів, піковий детектор, диференціюючий блок, датчик нормальної складової напруженості поля, два квадратора, перший суматор та блок добуту кореня, причому датчик нормальної складової напруженості поля через перший квадратор з'єднаний з першим входом першого суматора, а другий квадратор з'єднаний з другим входом суматора, вихід якого через блок добуту кореня підключений до входу тригера та входу пікового детектора, пару датчиків тангенційної складової напруженості поля, розташованих з протилежного боку виробу, при цьому їхні виходи з'єднані зі входами другого суматора, який відрізняється тим, що коерцитиметр забезпечено другою парою датчиків тангенційної складової напруженості поля, розташованих по обидва боки від виробу паралельно осі котушки Гельмгольца та симетрично відносно неї, при цьому виходи другої пари датчиків тангенційної складової напруженості поля з'єднані зі входами диференціюючого підсилювача, вихід якого сполучено з першим входом третього суматора, другий вхід якого зв'язано з виходом другого суматора, а вихід - зі входом другого квадратора.
Текст
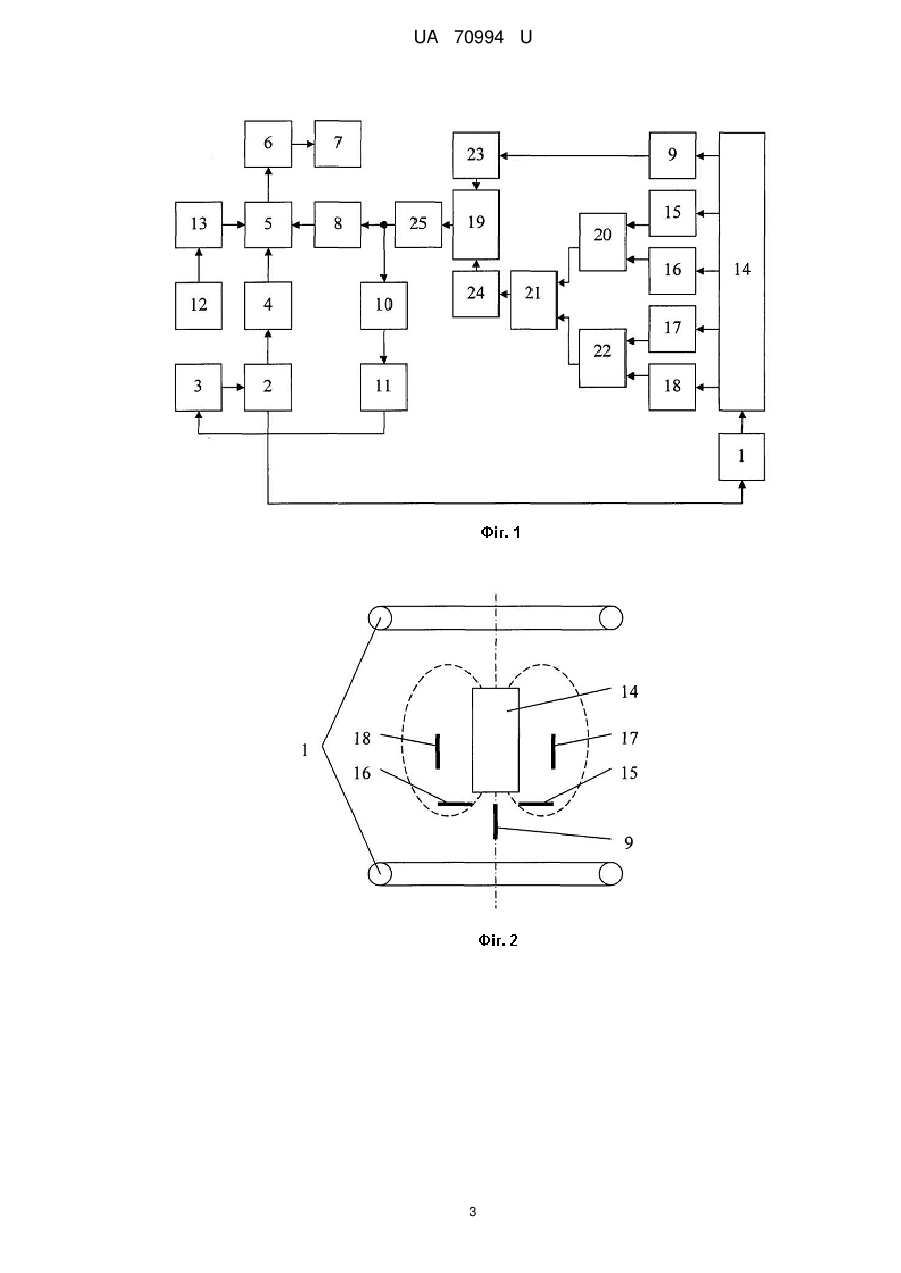
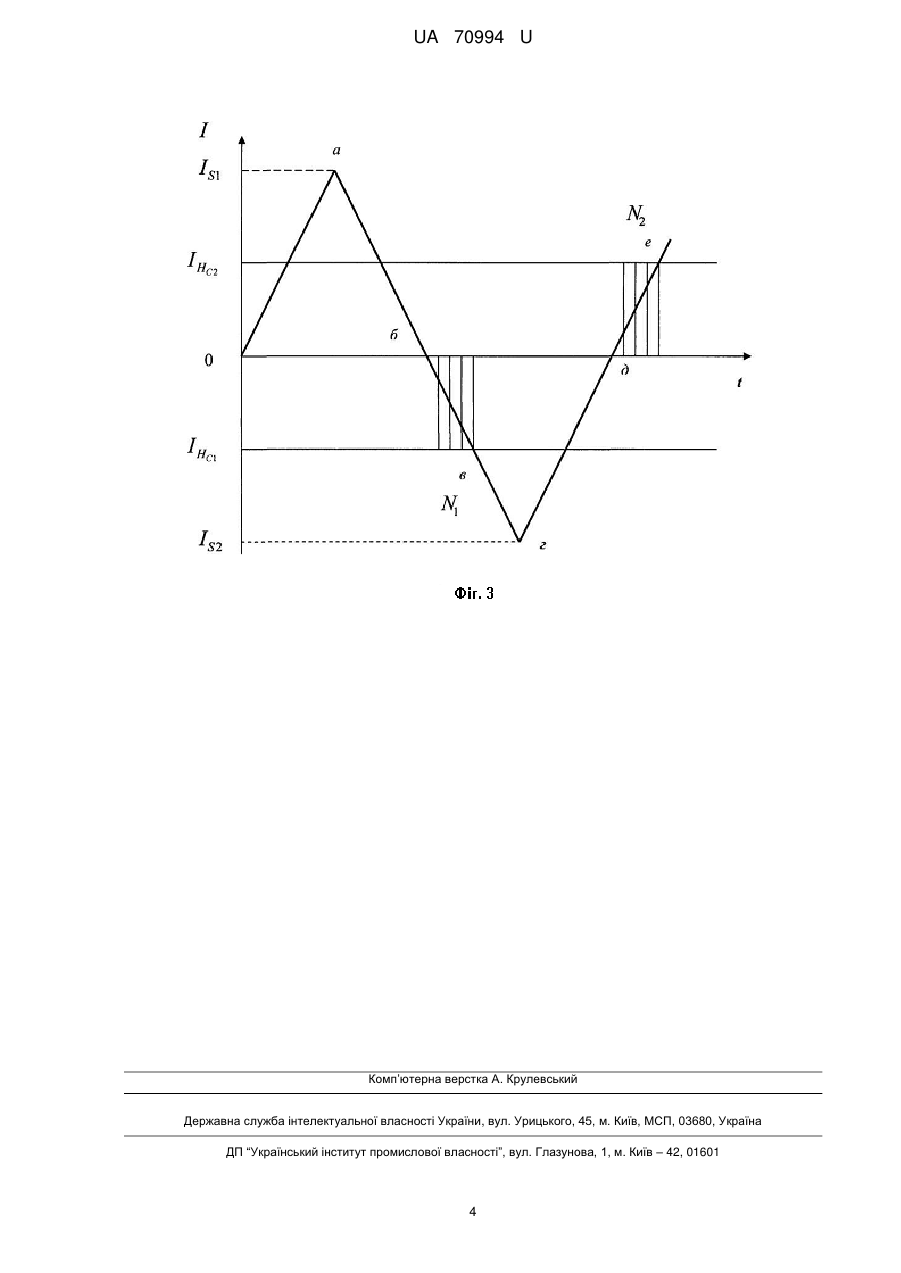
Реферат: UA 70994 U UA 70994 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до магнітних вимірювань, а саме до цифрових автоматичних коерцитиметрів, та може бути застосована для вимірювання твердості та механічних характеристик корелюючих з коерцитивною силою виробів з феромагнітних матеріалів. Відомо цифровий автоматичний коерцитиметр, що містить котушку Гельмгольца, генератор лінійного струму, блок керування, пороговий блок, елемент І, лічильник імпульсів, цифровий індикатор, тригер, генератор тактових імпульсів, дільник імпульсів, піковий детектор, диференціюючий блок, датчик тангенційної складової напруженості поля, датчик нормальної складової напруженості поля, два квадратора, суматор та блок добуту кореня, причому датчик нормальної складової напруженості поля через перший квадратор з'єднаний з першим входом суматора, а другий квадратор з'єднаний з другим входом суматора, вихід якого через блок добуту кореня підключений до входу тригера та входу пікового детектора, застосовано додатковий датчик тангенційної складової напруженості поля, розташований з протилежного боку виробу, при цьому виходи датчиків тангенційної складової напруженості поля з'єднані зі входами додаткового суматора, вихід якого підключений до входу другого квадратора [див. патент України №64160, G01R 33/12, опубл. 25.10.2011, бюл. № 20]. Недолік відомого цифрового автоматичного коерцитиметра полягає в тому, що через наявність пари датчиків тангенційної складової напруженості поля цифровий автоматичний коерцитиметр має недостатню чутливість та точність вимірювання при неточному позиціонуванні виробу. В основу корисної моделі поставлено задачу вдосконалення цифрового автоматичного коерцитиметра шляхом того, що застосовано додаткову пару датчиків тангенційної складової напруженості поля, розташованих по обидва боки від виробу паралельно осі котушки Гельмгольца та симетрично відносно неї, диференціюючий підсилювач та суматор, що дозволить підвищити чутливість коерцитиметра та зменшити вплив неточності позиціонування виробу на результат вимірювання коерцитивної сили. Поставлена задача вирішується тим, що у цифровому автоматичному коерцитиметрі, що містить котушку Гельмгольца, генератор лінійного струму, блок керування, пороговий блок, елемент І, лічильник імпульсів, цифровий індикатор, тригер, генератор тактових імпульсів, дільник імпульсів, піковий детектор, диференціюючий блок, датчик нормальної складової напруженості поля, два квадратора, перший суматор та блок добуту кореня, причому датчик нормальної складової напруженості поля через перший квадратор з'єднаний з першим входом першого суматора, а другий квадратор з'єднаний з другим входом суматора, вихід якого через блок добуту кореня підключений до входу тригера та входу пікового детектора, пару датчиків тангенційної складової напруженості поля, розташованих з протилежного боку виробу, при цьому їхні виходи з'єднані зі входами другого суматора, згідно з корисною моделлю, коерцитиметр забезпечено другою парою датчиків тангенційної складової напруженості поля, розташованих по обидва боки від виробу паралельно осі котушки Гельмгольца та симетрично відносно неї, при цьому виходи другої пари датчиків тангенційної складової напруженості поля з'єднані зі входами диференціюючого підсилювача, вихід якого сполучено з першим входом третього суматора, другий вхід якого зв'язано з виходом другого суматора, а вихід - зі входом другого квадратора. Суть корисної моделі пояснюється кресленням, де зображено цифровий автоматичний коерцитиметр (фіг. 1), що містить котушку Гельмгольца 1, генератор 2 лінійного струму, блок 3 керування, пороговий блок 4, елемент І 5, лічильник 6 імпульсів, цифровий індикатор 7, тригер 8, датчик нормальної складової напруженості поля 9, піковий детектор 10, диференціюючий блок 11, генератор 12 тактових імпульсів, дільник 13 імпульсів, виріб 14, першу пару датчиків тангенційної складової напруженості поля 15, 16, другу пару датчиків тангенційної складової напруженості поля 17, 18, перший-третій суматори 19-21, диференціюючий підсилювач, перший та другий квадратори 23, 24 та блок добуту кореня 25. На фіг. 2 наведено схему розташування виробу 14, першої пари датчиків тангенційної складової напруженості поля 15, 16, другої пари датчиків тангенційної складової напруженості поля 17, 18, розташованих по обидва боки від виробу 14 паралельно осі котушки Гельмгольца 1 та симетрично відносно неї, та датчика нормальної складової напруженості поля 9. На фіг. 3 наведено часові діаграми роботи цифрового автоматичного коерцитиметра. При подачі напруги живлення в цифровий автоматичний коерцитиметр та установлення виробу 14 в котушку Гельмгольца 1 блок 3 керування вмикає генератор 2 лінійного струму і в котушку Гельмгольца 1 подається струм, який лінійно зростає (проміжок 0-а діаграми І, фіг. 2), в результаті чого намагнічується виріб 14 і водночас збільшуються сигнали на виході датчика нормальної складової напруженості поля 9 та датчиків тангенційної складової напруженості поля 15-18. Сигнали датчиків тангенційної складової напруженості поля 15, 16 сумуються в 1 UA 70994 U 5 10 15 суматорі 20, сигнали датчиків тангенційної складової напруженості поля 17, 18 алгебраїчно віднімаються у диференціюючому підсилювачі 22, після цього сигнал з виходу третього суматора 21 зводиться у квадрат у другому квадраторі 24, сигнал датчика нормальної складової напруженості поля 9 зводиться у квадрат у першому квадраторі 23, потім сигнали сумуються у суматорі 19 та надходять у блок добуту кореня 25. При досягненні насичення виробу 14, що відповідає струму IS1 (точка а, фіг. 2), сигнал з виходу блока добуту кореня 25 сягає максимального значення та через піковий детектор 10 та диференціюючий блок 11 надходить у блок 3 керування, який дає команду генератору 2 лінійного струму. По цій команді струм зменшується до нуля (точка б, фіг. 2) та в момент переходу струму через нуль змінюється його полярність. У котушку Гельмгольца 1 подається струм зворотної полярності, який розмагнічує виріб 14. Одночасно з генератора 2 лінійного струму подається сигнал на пороговий блок 4, який відкриває елемент І 5 за умови наявності сигналу з тригера 8, і імпульси, які виробляє генератор 12 тактових імпульсів, через дільник 13 імпульсів надходять на лічильник 6 імпульсів. Зі зростанням струму відбувається розмагнічування виробу 14 і в момент рівності магнітного поля, наведеного в котушці Гельмгольца 1, коерцитивній силі HC1 виробу 14, що відповідає значенню струму IH (точка в, фіг. 2), сигнал на виході блока добуту кореня 25 зменшується до C1 20 25 30 35 40 нуля та відбувається перекидання тригера 8. Закривається елемент І 5 та припиняється надходження імпульсів з генератор 12 тактових імпульсів через дільник 13 імпульсів, який зменшує кількість імпульсів, вироблених, удвічі, на лічильник 6 імпульсів при цьому встановлюється кількість імпульсів N1/2, пропорційна половині величини коерцитивної сили HC1/2. Струм в котушці Гельмгольца 1 продовжує змінюватися за лінійним законом до I S2 (точка г, фіг. 2), при цьому відбувається перемагнічування виробу 14 і в точці г ( фіг. 2) він намагнічується до насичення, що відповідає збільшенню вихідного сигналу блока добуту кореня 25 до максимуму. Під дією цього сигналу через піковий детектор 10 та диференціюючий блок 11 блок 3 керування впливає на генератор 2 лінійного струму. По цій команді струм знову зменшується до нуля (точка д, фіг. 2) та в момент переходу струму через нуль блок 3 керування міняє напрям струму генератора 2 лінійного струму на зворотний, одночасно через пороговий блок 4 та елемент І 5 на лічильник 6 імпульсів надходять імпульси з генератора 12 тактових імпульсів через дільник 13 імпульсів. Зі зростанням струму знову відбувається розмагнічування виробу 14 і в момент рівності магнітного поля котушки Гельмгольца 1 коерцитивній силі H C2 виробу 14, що відповідає значенню струму IH (точка e, фіг. 2), на виході блока добуту кореня C2 21 з'являється нуль, що спричиняє перекидання тригера 8. Закривається елемент І 5 та припиняється надходження імпульсів з генератор 12 тактових імпульсів через дільник 13 імпульсів на лічильник 6 імпульсів, при цьому до кількості імпульсів Ν1/2, зареєстрованої ним при першому ліченні, пропорційній значенню HC1/2, додається кількість імпульсів N2/2, пропорційна значенню НС2/2, і на цифровий індикатор 7 подається Ν1/2+Ν2/2=N імпульсів, що відповідає коерцитивній силі НC1/2+НC2/2=НC виробу 14. Пропонована корисна модель забезпечить збільшення корисного сигналу та дозволить підвищити точність вимірів коерцитивної сили при неточній установці виробу 14 у котушці Гельмгольца 1. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 45 50 55 Цифровий автоматичний коерцитиметр, що містить котушку Гельмгольца, генератор лінійного струму, блок керування, пороговий блок, елемент І, лічильник імпульсів, цифровий індикатор, тригер, генератор тактових імпульсів, дільник імпульсів, піковий детектор, диференціюючий блок, датчик нормальної складової напруженості поля, два квадратора, перший суматор та блок добуту кореня, причому датчик нормальної складової напруженості поля через перший квадратор з'єднаний з першим входом першого суматора, а другий квадратор з'єднаний з другим входом суматора, вихід якого через блок добуту кореня підключений до входу тригера та входу пікового детектора, пару датчиків тангенційної складової напруженості поля, розташованих з протилежного боку виробу, при цьому їхні виходи з'єднані зі входами другого суматора, який відрізняється тим, що коерцитиметр забезпечено другою парою датчиків тангенційної складової напруженості поля, розташованих по обидва боки від виробу паралельно осі котушки Гельмгольца та симетрично відносно неї, при цьому виходи другої пари датчиків тангенційної складової напруженості поля з'єднані зі входами диференціюючого підсилювача, вихід якого сполучено з першим входом третього суматора, другий вхід якого зв'язано з виходом другого суматора, а вихід - зі входом другого квадратора. 2 UA 70994 U 3 UA 70994 U Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюDigital automated coercimeter
Автори англійськоюSmyrnyi Mykhailo Fedorovych
Назва патенту російськоюЦифровой автоматический коэрцитиметр
Автори російськоюСмирный Михаил Федорович
МПК / Мітки
МПК: G01R 33/12
Мітки: коерцитиметр, автоматичний, цифровий
Код посилання
<a href="https://ua.patents.su/6-70994-cifrovijj-avtomatichnijj-koercitimetr.html" target="_blank" rel="follow" title="База патентів України">Цифровий автоматичний коерцитиметр</a>
Цифровий автоматичний коерцитиметр

Номер патенту: 64180
Опубліковано: 25.10.2011
Автор: Смірний Михайло Федорович
МПК: G01R 33/12
Мітки: коерцитиметр, цифровий, автоматичний
Формула / Реферат:
Цифровий автоматичний коерцитиметр, що містить котушку Гельмгольца, генератор лінійного струму, блок керування, пороговий блок, елемент І, лічильник імпульсів, цифровий індикатор, тригер, генератор тактових імпульсів, дільник імпульсів, піковий детектор, диференціюючий блок, датчик тангенційної складової напруженості поля, датчик нормальної складової напруженості поля, два квадратори, суматор та блок добування кореня, причому датчик...
Цифровий автоматичний коерцитиметр
Номер патенту: 70992
Опубліковано: 25.06.2012
Автор: Смірний Михайло Федорович
МПК: G01R 33/12
Мітки: цифровий, автоматичний, коерцитиметр
Формула / Реферат:
Цифровий автоматичний коерцитиметр, що містить котушку Гельмгольца, генератор лінійного струму, блок керування, пороговий блок, елемент І, лічильник імпульсів, цифровий індикатор, тригер, генератор тактових імпульсів, дільник імпульсів, піковий детектор, диференціюючий блок, датчик тангенційної складової напруженості поля, датчик нормальної складової напруженості поля, два квадратора, суматор та блок добування кореня, причому датчик...
Цифровий автоматичний коерцитиметр
Номер патенту: 31214
Опубліковано: 15.12.2000
Автори: Фесенко Борис Михайлович, Смірний Михайло Федорович
МПК: G01R 33/12
Мітки: коерцитиметр, автоматичний, цифровий
Текст:
...тактових імпульсів 12, дільника імпульсів 13, виробу 14, датчика тангенційної складової напруженості 15, квадраторов 16, 17, суматора 18, блока добуту кореня 19. Подальша сутність винаходу пояснюється сумісно з принципом роботи запропонованого цифрового автоматичного коерцитиметра. При подачі напруги живлення у цифровий автоматичний коерцитиметр та установлення виробу 14 у котушку Гельмгольца 1 блок керування 3 вмикає генератор...
Цифровий автоматичний коерцитиметр
Номер патенту: 64183
Опубліковано: 25.10.2011
Автори: Смірний Михайло Федорович, Капуста Леонід Володимирович
МПК: G01R 33/12
Мітки: цифровий, коерцитиметр, автоматичний
Формула / Реферат:
Цифровий автоматичний коерцитиметр, що містить послідовно з'єднані блок управління, генератор лінійного струму, котушку Гельмгольца, послідовно з'єднані ферозонд, тригер, елемент І, лічильник імпульсів, цифровий індикатор, генератор тактових імпульсів, пороговий блок, при цьому другий вихід генератора лінійного струму через пороговий блок сполучений з другим входом елемента І, дільник імпульсів, піковий детектор, диференціюючий ланцюг,...
Автоматичний вимірювач напруженості електромагнітного поля
Номер патенту: 7135
Опубліковано: 15.06.2005
Автори: Ільницький Людвіг Якович, Щербина Ольга Алімівна
МПК: G01R 29/08
Мітки: автоматичний, вимірювач, напруженості, поля, електромагнітного
Формула / Реферат:
Автоматичний вимірювач напруженості електромагнітного поля, який містить вимірювальну антену, що з'єднана з першим входом комутатора, вихід якого приєднаний до першого входу приймача, другий вхід приймача з'єднаний з виходом гетеродина, вихід гетеродина з'єднаний з входом вимірювача частоти і з другим входом змішувача, до першого входу якого підключений генератор постійної частоти, вихід змішувача підключений до входу атенюатора надвисоких...
Попередній патент: Пристрій для визначення механічних напружень у феромагнітних конструкціях
Наступний патент: Пристрій для визначення механічних напружень у феромагнітних конструкціях
Випадковий патент: Космічний корабель "світ"