Спосіб керування силовим активним фільтром постійного струму з паралельним підключенням інвертора напруги
Формула / Реферат
Спосіб керування силовим активним фільтром постійного струму з паралельним включенням інвертора напруги, який відрізняється тим, що вимірюють напругу пульсацій на виході випрямляча, напругу та струм в паралельній гілці фільтра та струм в послідовній гілці, розраховують напругу на послідовній гілці, визначають комплексний опір гілок фільтра на частоті і-ої гармоніки та розраховують вихідну напругу компенсації інвертора на частоті і-ої гармоніки ![]() за формулами (1)-(4):
за формулами (1)-(4):
![]() , (1)
, (1)
![]() , (2)
, (2)
![]() , (3)
, (3)
![]() , (4)
, (4)
де:
![]() - напруга на послідовній гілці фільтра;
- напруга на послідовній гілці фільтра;
![]() - напруга на виході випрямляча;
- напруга на виході випрямляча;
![]() - комплексний опір послідовної гілки фільтра;
- комплексний опір послідовної гілки фільтра;
![]() - струм в послідовній гілці фільтра;
- струм в послідовній гілці фільтра;
![]() - комплексний опір паралельної гілки фільтра;
- комплексний опір паралельної гілки фільтра;
![]() - напруга на паралельній гілці фільтра;
- напруга на паралельній гілці фільтра;
![]() - струм в паралельній гілці фільтра,
- струм в паралельній гілці фільтра,
повну вихідну напругу інвертора фільтра знаходять як суму всіх гармонійних складових ![]() , що компенсуються.
, що компенсуються.
Текст
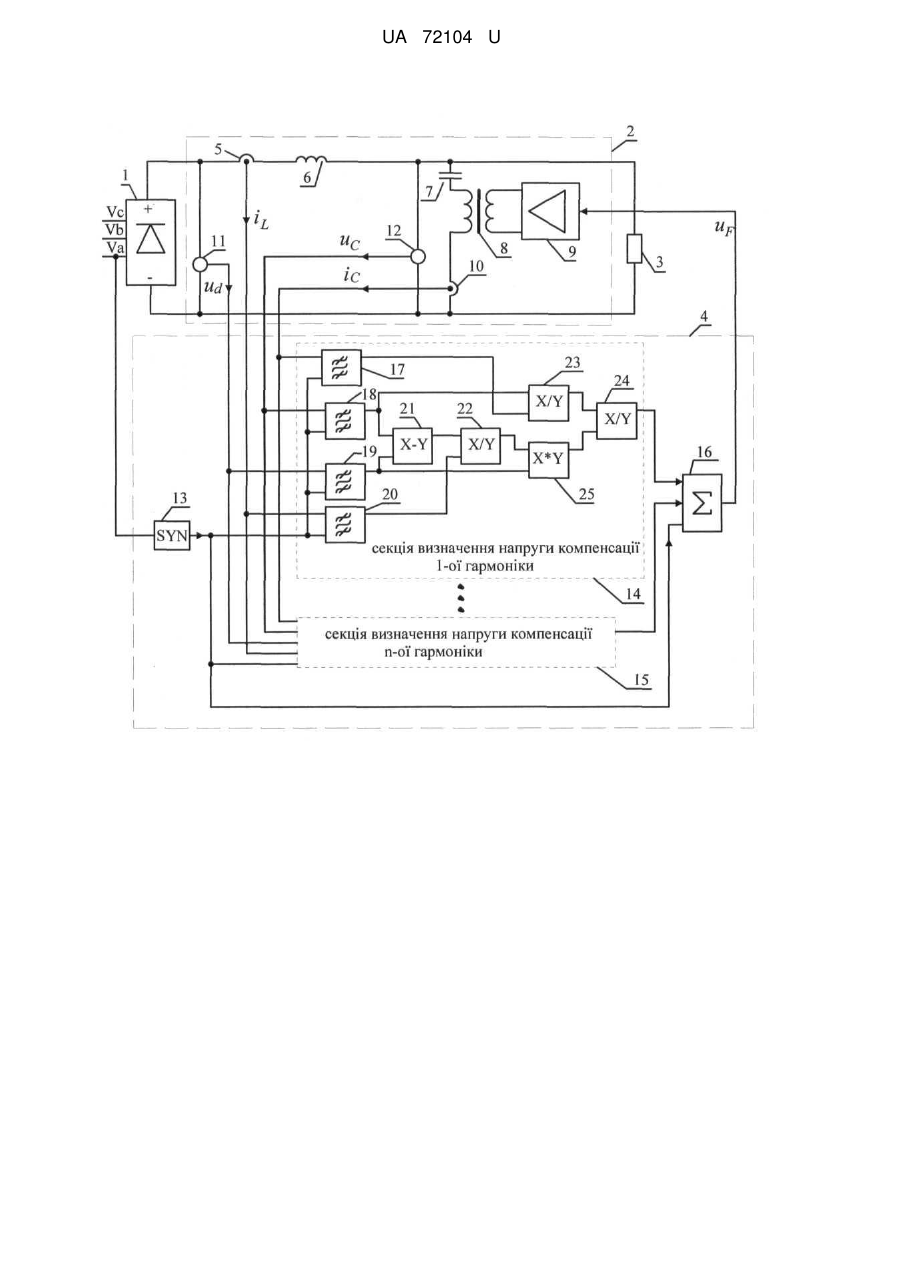
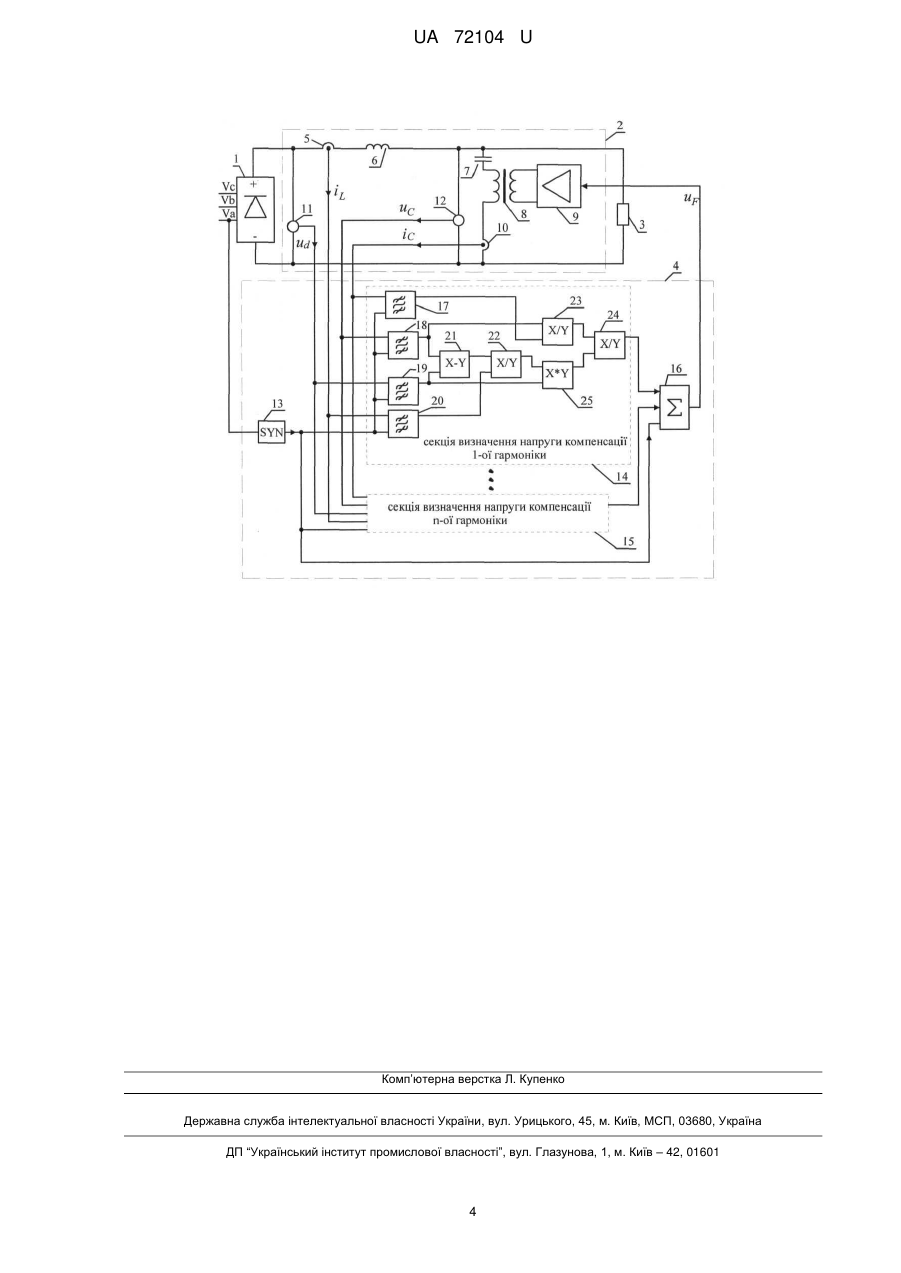
Реферат: Спосіб керування силовим активним фільтром постійного струму з паралельним включенням інвертора напруги полягає у тому, що вимірюють напругу пульсацій на виході випрямляча, напругу та струм в паралельній гілці фільтра та струм в послідовній гілці, розраховують напругу на послідовній гілці, визначають комплексний опір гілок фільтра на частоті і-ої гармоніки та розраховують вихідну напругу компенсації інвертора на частоті і-ої гармоніки u Fi за визначеними формулами. UA 72104 U (54) СПОСІБ КЕРУВАННЯ СИЛОВИМ АКТИВНИМ ФІЛЬТРОМ ПОСТІЙНОГО СТРУМУ З ПАРАЛЕЛЬНИМ ПІДКЛЮЧЕННЯМ ІНВЕРТОРА НАПРУГИ UA 72104 U UA 72104 U 5 10 15 20 25 30 35 40 Корисна модель належить до електротехніки і може використовуватися в силових активних фільтрах на тягових підстанціях постійного струму електротранспорту та електрифікованих залізниць для зниження негативного впливу тягової мережі на лінії зв'язку та залізничну автоматику. Відомо про пристрій компенсації пульсацій випрямленої напруги [SU 1387135], система керування якого складається з датчика змінної складової випрямленої напруги, фазового коректора, блока порівняння фаз та підсилювача, що інвертує. Сигнал з виходу підсилювача подається на реактор в протифазі до вхідного сигналу. Недоліком такого рішення є те, що фазовий коректор, включений на виході датчика напруги, використовує як сигнал корекції напругу на виході підсилювача потужності, тобто утворює систему керування з зворотнім зв'язком, яка приводить до появи коливань в системі та погіршенню якості компенсації. Крім того, протікання постійної складової струму навантаження по реактору викликає появу напруги зсуву вихідного каскаду підсилювача, що порушує його роботу. Відомо про пристрій для зменшення шумів джерела живлення постійного струму [US 4667279], що складається з вхідного високочастотного фільтра, який підключений до виходу джерела живлення, що виділяє сигнал шуму, фазового коректора, підсилювача, підключеного до первинної обмотки трансформатора. Вторинна обмотка трансформатора включається послідовно з навантаженням таким чином, щоб зменшити шуми в ньому. Недоліком пристрою за патентом [US 4667279] є складність забезпечення необхідного фазового зсуву в коректорі в широкому діапазоні частот і різних режимах роботи пристрою, при зміні параметрів підсилювача потужності і трансформатора в часі. Як прототип для корисної моделі вибрано схему керування активного фільтра постійного струму [ЕР 0901691 В1], в якій компенсація змінних складових виконується окремими блоками для кожної гармоніки, що придушується. Вхідним сигналом для системи керування є струм навантаження. Кожен блок виконує функції фільтрації, пропорційно-інтегральної ланки та синтезу напруги компенсації. Система керування реалізується за допомогою мікропроцесорного пристрою. Недоліком такого рішення є залежність струму, що компенсується, від струму навантаження, низький рівень придушення гармонійних складових, пов'язаний з стабільністю кола автоматичного керування, що характерно для систем зі зворотними зв'язками, принципом роботи яких є керування за відхиленням. Технічною задачею, що вирішується корисною моделлю, що заявляється, є удосконалення системи керування активного фільтра постійного струму для покращення компенсації змінної складової випрямленої напруги та забезпечення принципу керування за збуренням для забезпечення швидкодії та стійкості системи. Суть корисної моделі. Спосіб керування силовим активним фільтром постійного струму з паралельним включенням інвертора напруги відповідно до корисної моделі відрізняється тим, що вимірюють напругу пульсацій на виході випрямляча, напругу та струм в паралельній гілці фільтра та струм в послідовній гілці, розраховують напругу на послідовній гілці, визначають комплексний опір гілок фільтра на частоті і-ої гармоніки та розраховують вихідну напругу компенсації інвертора на частоті і-ої гармоніки uFi за формулами (1)-(4): uLi uDi uCi , (1) uLi iLi C i (2) ZLi , 45 ZCi uCi iCi , uFi uDi ZCi ZLi , (3) (4) де: uLi - напруга на послідовній гілці фільтра; 1 UA 72104 U uDi - напруга на виході випрямляча; ZLi - комплексний опір послідовної гілки фільтра; iLi - струм в послідовній гілці фільтра; ZCi - комплексний опір паралельної гілки фільтра; 5 uCi - напруга на паралельній гілці фільтра; iCi - струм в паралельній гілці фільтра. Повну вихідну напругу інвертора фільтра знаходять як суму всіх гармонійних складових uFi ( t ) , що компенсуються. 10 15 20 25 30 35 На кресленні наведено структурну схему силового активного фільтра та системи керування, яка реалізує спосіб, що заявляється. Силовий активний фільтр 2 своїм входом підключений до виходу трифазного випрямляча 1, а виходом - до навантаження 3. Керування силовим активним фільтром 2 здійснюється системою керування 4. Силовий активний фільтр 2 складається з послідовної гілки, що включає в себе датчик струму 5 і реактор 6, паралельної гілки, що складається з конденсатора 7, розподільчого трансформатора 8, інвертора 9 і датчика струму 10. До складу активного фільтра входять також датчик напруги 11, включений на вході фільтра, і датчик напруги 12, включений на виході фільтра. Система керування 4, що реалізується на основі мікропроцесорного обчислювача, містить n однакових секцій, де n - кількість гармонік, які підлягають компенсації, і складається з блока синхронізації з напругою живлення 13, вхід якого підключений до фази А живлячої напруги, а вихід - до входів секцій визначення напруги компенсації 14-15, виходи яких підключені до входів блока обчислення сумарного керуючого сигналу 16, вихід якого, в свою чергу, з'єднаний з входом інвертора 9. На вхід блока 16 надходить сигнал з виходу блока синхронізації 13. Структура секцій 14-15 ідентична, до складу секції входять: блоки цифрових фільтрів 17, 18, 19, 20, на входи яких подаються сигнали від датчика струму паралельної гілки 10, датчика вихідної напруги 12, датчика вхідної напруги 11 і датчика струму послідовної гілки 5, відповідно, а також сигнал синхронізації з виходу блока 13. Вихід фільтра 18 з'єднується з першим входом блока знаходження різниці 21 і першим входом блока ділення 23, другий вхід якого з'єднаний з виходом фільтра 17. Вихід фільтра 19 з'єднаний з другим входом блока знаходження різниці 21 і другим входом блока множення 25. Вихід блока знаходження різниці 21 з'єднаний з першим входом блока ділення 22, другий вхід якого з'єднаний з блоком фільтра 20, а вихід блока 22 з'єднаний з першим входом блока множення 25, вихід якого з'єднаний з другим входом блока ділення 24, перший вхід якого з'єднаний з виходом блока ділення 23. Вихід блока ділення 24 включений до входу блока обчислення сумарного керуючого сигналу 16. Спосіб керування, що пропонується, реалізується наступним чином. Струм iC ( t ) , що протікає по паралельній гілці активного фільтра, вимірюється датчиком струму 10 і надходить на вхід смугового фільтра 17. Вихідна напруга паралельної гілки 40 активного фільтра uC (t ) вимірюється датчиком напруги 12 і надходить на вхід смугового фільтра 18. Вихідна напруга випрямляча ud ( t ) вимірюється датчиком напруги 5 і надходить на вхід фільтра 19. Струм iL (t ) , що протікає по послідовній гілці активного фільтра, вимірюється датчиком струму 5 і надходить на вхід смугового фільтра 20. Смугові фільтри 17-20 виділяють з вхідного сигналу сигнал і-ої гармоніки, яку необхідно компенсувати, на їх виходах отримуються 45 сигнали iCi , uCi , u di , iLi , відповідно. Блок знаходження різниці 21, на вхід якого надходять u di і uCi , виконує обчислення за формулою (1) і на його виході формується сигнал, відповідний падінню напруги на послідовній гілці фільтра uLi . Блок ділення 22, на входи якого надходять сигнали uLi і iLi , виконує обчислення за формулою (2), на його виході формується сигнал, відповідний опору послідовної 50 гілки фільтра ZLi . Блок ділення 23, на входи якого надходять сигнали uCi і iCi , виконує обчислення за формулою (3), на його виході формується сигнал, відповідний опору паралельної гілки фільтра Z Ci . Блок ділення 24 та блок множення 25, на входи яких поступають сигнали ZLi , 2 UA 72104 U Z Ci і u di , виконують обчислення за формулою (4), на виході блока 24 отримується напруга 5 компенсації uFi , яка надходить до блока додавання 16, до інших входів якого підключені виходи секцій компенсації відповідних гармонік. На виході блока 16 формується результуючий сигнал керування, який подається на вхід інвертора 9. Таким чином, наведений спосіб керуванням активним фільтром, реалізуючи принцип керування за збуренням, забезпечує повну компенсацію пульсацій випрямленої напруги, зменшуючи негативний вплив на пристрої залізничної автоматики та канали зв'язку. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 15 Спосіб керування силовим активним фільтром постійного струму з паралельним включенням інвертора напруги, який відрізняється тим, що вимірюють напругу пульсацій на виході випрямляча, напругу та струм в паралельній гілці фільтра та струм в послідовній гілці, розраховують напругу на послідовній гілці, визначають комплексний опір гілок фільтра на частоті і-ої гармоніки та розраховують вихідну напругу компенсації інвертора на частоті і-ої гармоніки u Fi за формулами (1)-(4): u Li u Di uCi , (1) Z Li Z Ci 20 u Li , (2) iLiCi u Ci , (3) iCi u Fi u Di Z Ci , (4) Z Li де: u Li - напруга на послідовній гілці фільтра; u Di - напруга на виході випрямляча; Z Li - комплексний опір послідовної гілки фільтра; 25 i Li - струм в послідовній гілці фільтра; Z Ci - комплексний опір паралельної гілки фільтра; uCi - напруга на паралельній гілці фільтра; iCi - струм в паралельній гілці фільтра, повну вихідну напругу інвертора фільтра знаходять як суму всіх гармонійних складових u Fi (t ) , 30 що компенсуються. 3 UA 72104 U Комп’ютерна верстка Л. Купенко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for dc active filter control with parallel connection of voltage invertor
Автори англійськоюZubenko Vasyl Anatoliiovych
Назва патенту російськоюСпособ управления силовым активным фильтром постоянного тока с параллельным подключением инвертора напряжения
Автори російськоюЗубенко Василий Анатольевич
МПК / Мітки
МПК: H02M 1/15
Мітки: струму, силовим, постійного, паралельним, підключенням, напруги, керування, спосіб, фільтром, активним, інвертора
Код посилання
<a href="https://ua.patents.su/6-72104-sposib-keruvannya-silovim-aktivnim-filtrom-postijjnogo-strumu-z-paralelnim-pidklyuchennyam-invertora-naprugi.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування силовим активним фільтром постійного струму з паралельним підключенням інвертора напруги</a>
Система керування паралельним силовим гібридним фільтром
Номер патенту: 79299
Опубліковано: 11.06.2007
Автори: Жук Дмитро Олександрович, Запальський Володимир Миколайович, Жук Олександр Кирилович
МПК: H03B 1/00
Мітки: керування, силовим, паралельним, гібридним, фільтром, система
Формула / Реферат:
Система керування паралельним силовим гібридним фільтром, яка містить контролер, що сполучений з датчиками струму мережі та напруги в колі постійного струму автономного інвертора напруги, яка відрізняється тим, що система додатково містить датчики вихідного струму автономного інвертора напруги, поточної фази напруги і струму в мережі живлення, виходи яких з'єднано з інформаційними входами контролера.
Пристрій захисту статичного інвертора активного фільтра постійного струму
Номер патенту: 44580
Опубліковано: 12.10.2009
Автори: Зубенко Василь Анатолійович, Сиченко Віктор Григорович
Мітки: статичного, фільтра, інвертора, струму, пристрій, захисту, постійного, активного
Формула / Реферат:
Пристрій захисту статичного інвертора активного фільтра постійного струму, який містить силовий трансформатор, інвертор та систему керування, який відрізняється тим, що первинна сторона трансформатора з'єднана з варистором та з двома тиристорами паралельно, а вимірювальний трансформатор струму - послідовно, причому вихід трансформатора струму з'єднаний з компаратором, вихід якого з'єднаний з першим входом тригера, одночасно другий вхід...
Спосіб розрахунку параметрів керування силовим перетворювачем в системі взаємного навантаження машин постійного струму
Номер патенту: 69961
Опубліковано: 25.05.2012
Автори: Сухорук Сергій Валентинович, Ломонос Андрій Іванович
МПК: G01R 31/00, G06F 1/18
Мітки: розрахунку, силовим, системі, навантаження, керування, струму, спосіб, взаємного, перетворювачем, параметрів, машин, постійного
Формула / Реферат:
Спосіб розрахунку параметрів керування силовим перетворювачем в системі взаємного навантаження машин постійного струму, при якому формується режим навантаження з впливом на коло обмотки збудження і задається постійною та змінними складовими сигналу керування, який відрізняється тим, що для розрахунку параметрів керування використовується гібридна нейронна система, а для розрахунку кожного з параметрів керування використовується окрема...
Пристрій керування низьковольтним електродвигуном постійного струму середньої потужності
Номер патенту: 84349
Опубліковано: 10.10.2008
Автор: Семігін Яків Львович
МПК: H02K 15/00
Мітки: низьковольтним, потужності, струму, керування, постійного, середньої, електродвигуном, пристрій
Формула / Реферат:
Пристрій керування низьковольтним електродвигуном постійного струму середньої потужності, що містить перетворювач частоти в напругу та електродвигун, який відрізняється тим, що додатково містить блок живлення, блок керування, блок автоматичного гальмування та імпульсний датчик частоти обертання електродвигуна, при цьому вихід блока живлення сполучений з першим входом блока керування, перший вихід якого сполучений з входом блока автоматичного...
Спосіб обмеження вихідних струмів трифазного мостового інвертора напруги з широтно-імпульсним регулюванням вихідної напруги, який живить двигун змінного струму
Номер патенту: 20237
Опубліковано: 15.01.2007
Автори: Волков Олександр Васильович, Скалько Юрій Сергійович
МПК: H02P 27/04
Мітки: двигун, інвертора, напруги, живить, регулюванням, струмів, мостового, вихідної, широтно-імпульсним, змінного, обмеження, вихідних, струму, спосіб, трифазного
Формула / Реферат:
Спосіб обмеження вихідних струмів трифазного мостового інвертора з широтно-імпульсним регулюванням вихідної напруги, який живить двигун змінного струму, який полягає у тому, що контролюють вихідні фазні струми інвертора, порівнюють миттєві абсолютні значення кожного з контрольованих вихідних фазних струмів інвертора з припустимим для них граничним значенням, і якщо ці струми не перевищують граничного значення, задають відкриті і закриті стани...
Попередній патент: Сорбційний матеріал біодеструктивного типу для очищення ґрунтів від нафтопродуктів
Наступний патент: Пристрій для накачування пневматичних шин
Випадковий патент: Паросилова електроенергетична установка з підземним термосифонним парогенератором та підземним термосифонним пароперегрівачем