Спосіб розрахунку параметрів керування силовим перетворювачем в системі взаємного навантаження машин постійного струму
Номер патенту: 69961
Опубліковано: 25.05.2012
Автори: Сухорук Сергій Валентинович, Ломонос Андрій Іванович
Формула / Реферат
Спосіб розрахунку параметрів керування силовим перетворювачем в системі взаємного навантаження машин постійного струму, при якому формується режим навантаження з впливом на коло обмотки збудження і задається постійною та змінними складовими сигналу керування, який відрізняється тим, що для розрахунку параметрів керування використовується гібридна нейронна система, а для розрахунку кожного з параметрів керування використовується окрема система.
Текст
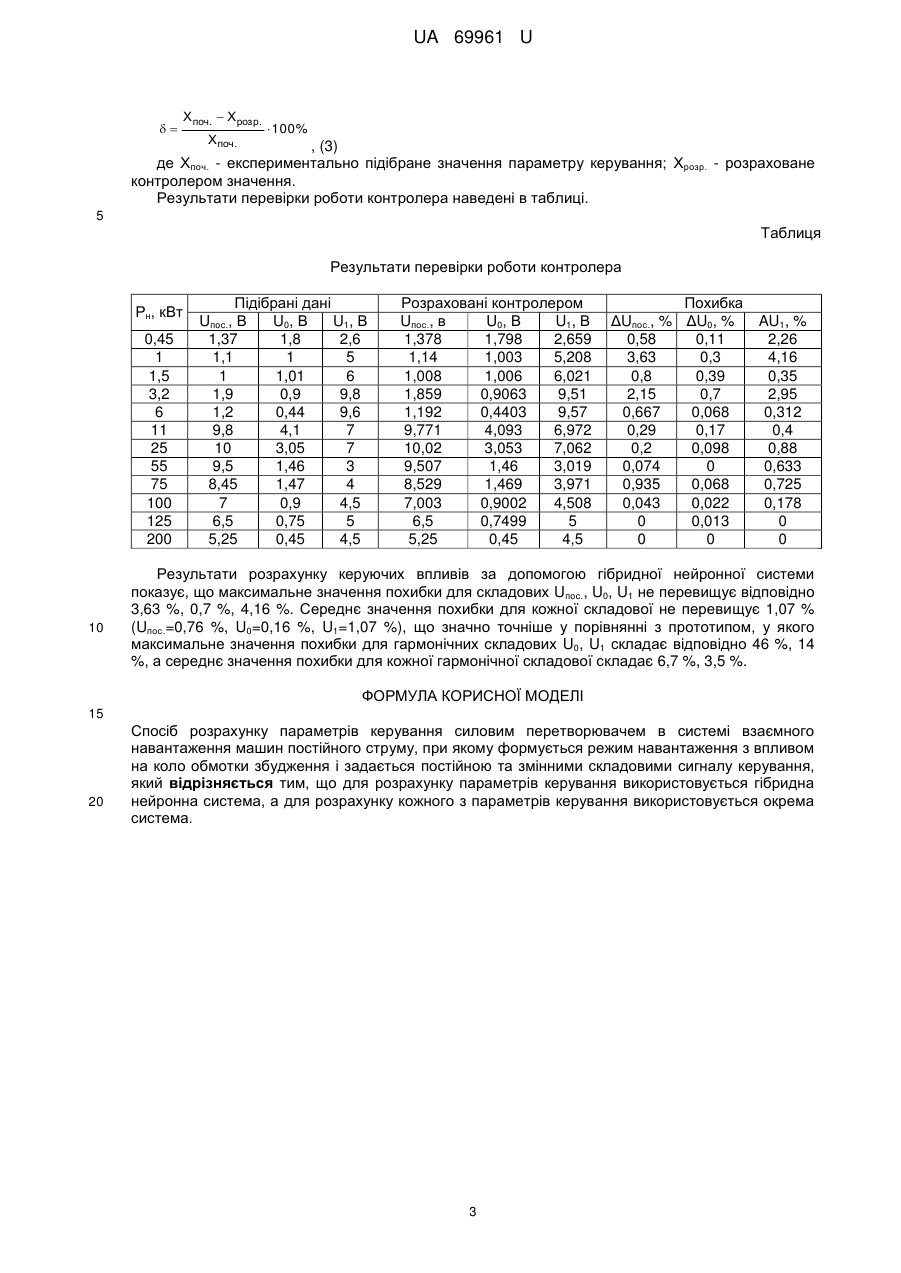
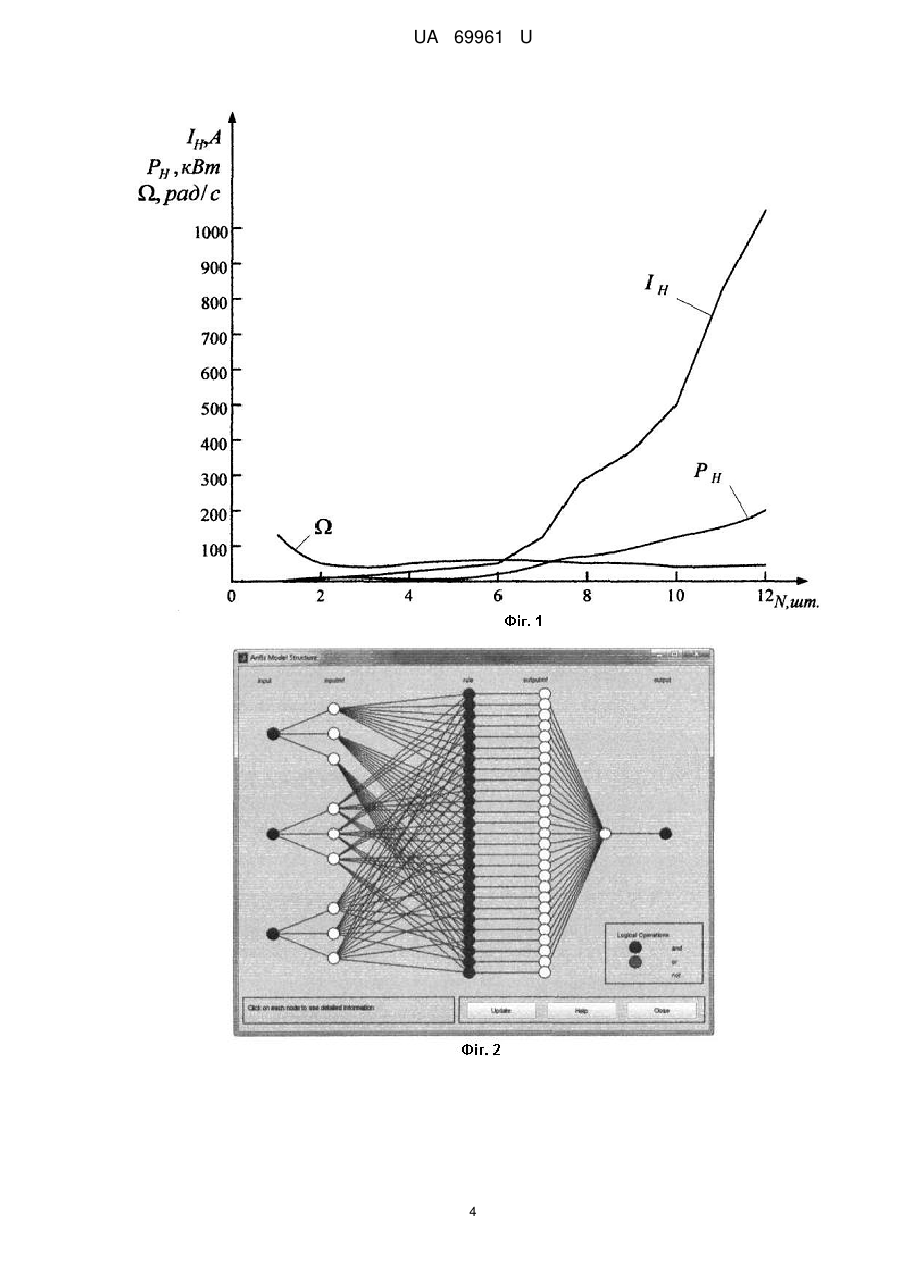
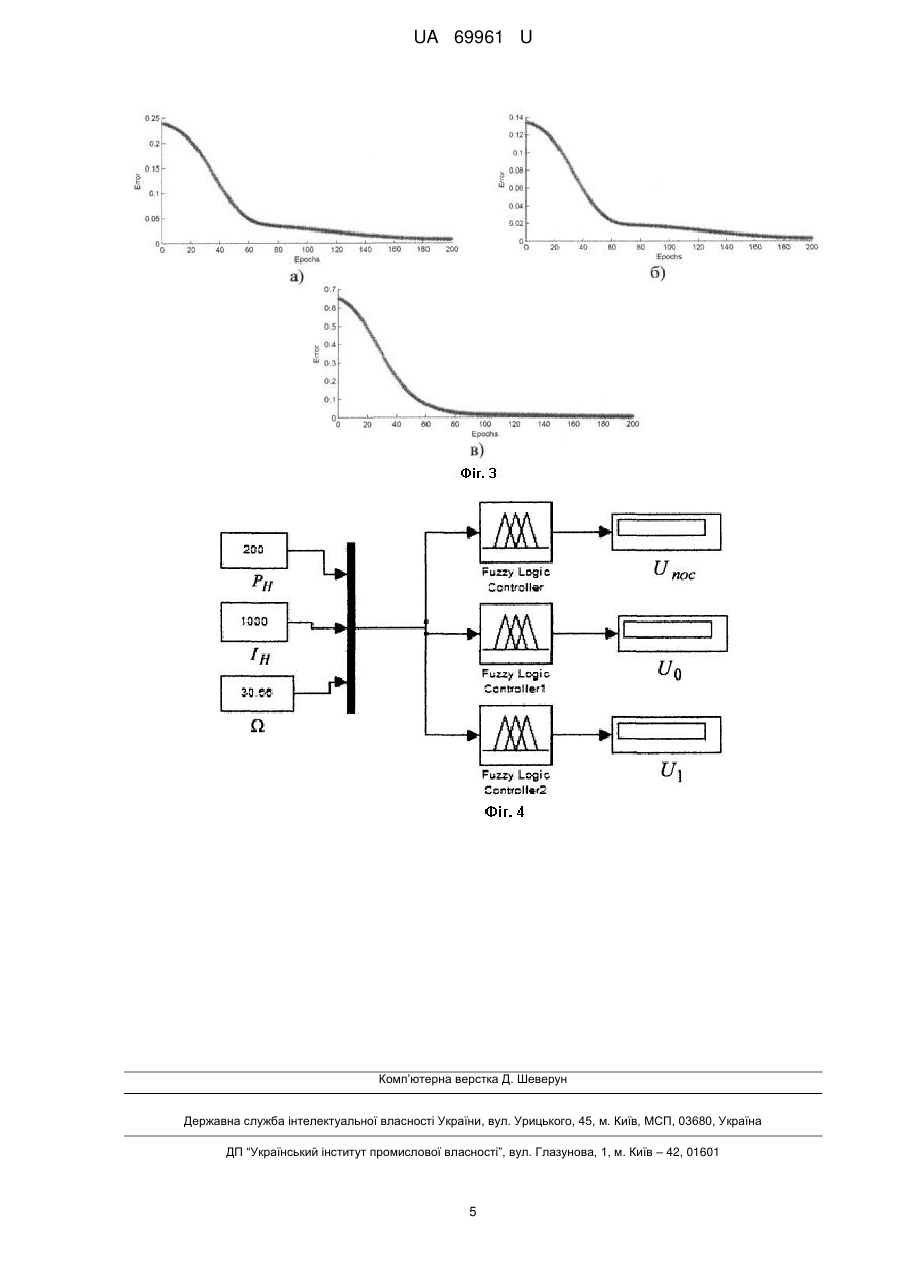
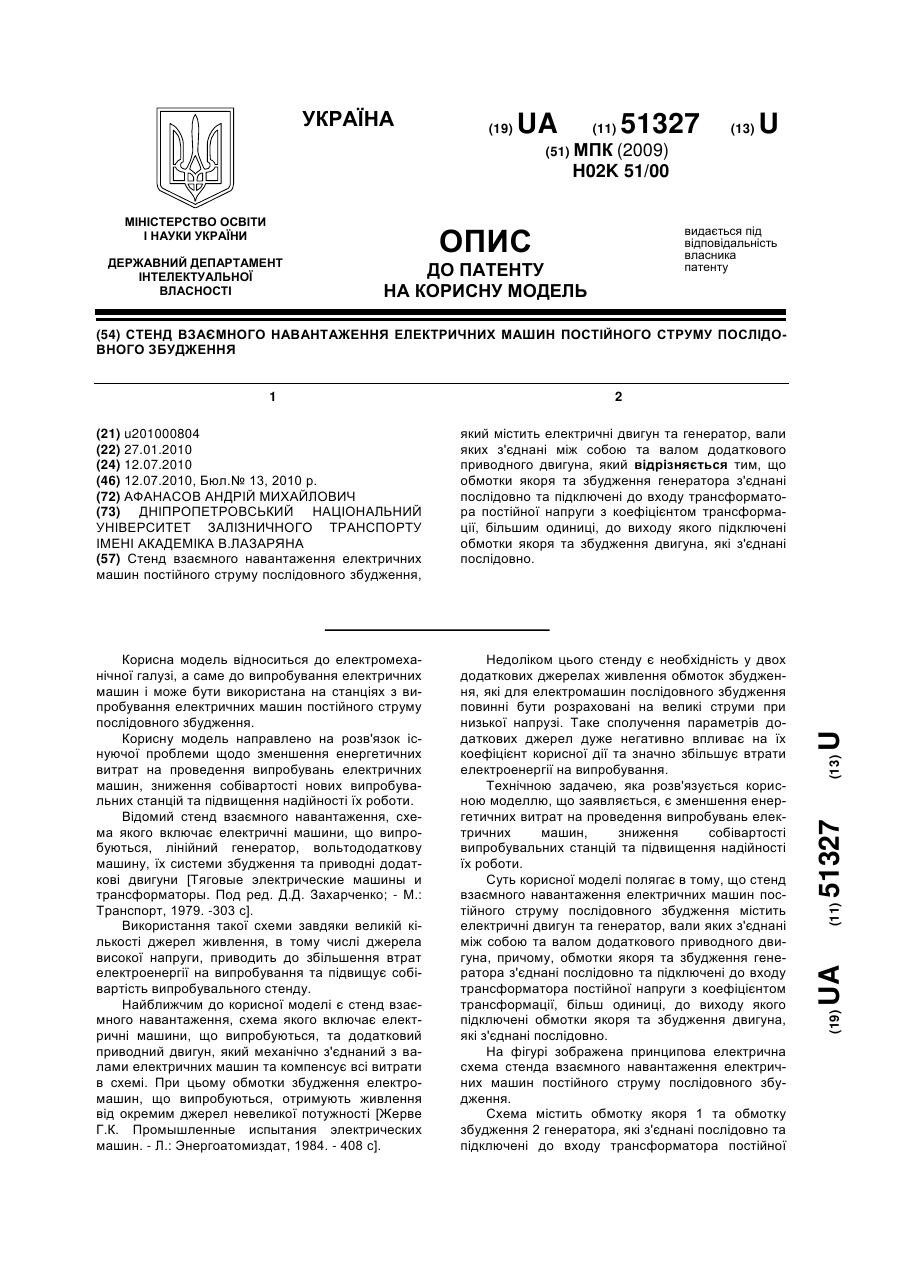
Реферат: Спосіб розрахунку параметрів керування силовим перетворювачем в системі взаємного навантаження машин постійного струму, при якому формується режим навантаження з впливом на коло обмотки збудження і задається постійною та змінними складовими сигналу керування. Для розрахунку параметрів керування використовується гібридна нейронна система, а для розрахунку кожного з параметрів керування використовується окрема система. UA 69961 U (54) СПОСІБ РОЗРАХУНКУ ПАРАМЕТРІВ КЕРУВАННЯ СИЛОВИМ ПЕРЕТВОРЮВАЧЕМ В СИСТЕМІ ВЗАЄМНОГО НАВАНТАЖЕННЯ МАШИН ПОСТІЙНОГО СТРУМУ UA 69961 U UA 69961 U 5 10 15 20 25 30 35 40 45 50 Корисна модель належить до систем навантаження електричних машин і може бути застосована для підбору параметрів керування машин постійного струму при їх випробуванні. Відоме технічне рішення підбору параметрів навантажувальних режимів машин постійного струму незалежного збудження [Спосіб навантаження двигунів постійного струму і пристрій для його здійснення АС СРСР, 1563410 G01R 31/34], за яким в процесі навантаження задають постійні значення напруг якоря і струму збудження, а динамічна складова струму якоря утворюється як частка змінної складової напруги живлення двигуна і комплексного опору ланцюга якоря. Недоліками даного технічного рішення є те, що: - частота періодичного впливу задається, а реакція двигуна на цей вплив визначається в ході експерименту; - необхідне значення струму і швидкості підбираються в процесі навантаження шляхом зміни частоти й амплітуди періодичної складової напруги. Суттєві ознаки спільні із ознаками способу, що заявляється: - підбір параметрів керування здійснюється для двигунів постійного струму незалежного збудження; - сигнал керування складається з постійної та змінної складової. Відоме технічне рішення розрахунку керуючих впливів при формуванні навантажувальних режимів машин постійного струму із використанням нечіткого контролера [Ломонос А.І., Конох І.С, Удовицький О.В. Побудова нечіткого контролеру для розрахунку керуючих впливів при формуванні навантажувальних режимів машин постійного струму // Електромеханічні і енергозберігаючі системи. Випуск 4/2010 (12). - С. 81-85]. Підбір параметрів здійснюється для навантажувальних режимів двигунів з впливом на обмотку збудження. Для розрахунку використовується нечіткий контролер, призначенням якого є розрахунок амплітудних значень гармонічних складових напруги керування для конкретного електричного двигуна постійного струму. Побудова контролера здійснюється в пакеті Matlab за допомогою FIS-редактора. Недоліки даного способу: - велика похибка розрахунків; - потреба у ручному налаштуванні параметрів контролера при подальшому його навчанні. Суттєві ознаки, що збігаються із ознаками способу, що заявляється: - розрахунок параметрів керування здійснюється для систем взаємного навантаження; - сигнал керування складається з постійної та змінної складової. Відомий винахід прийнято як найближчий аналог способу, що заявляється. В основу корисної моделі поставлена задача автоматизації та підвищення точності розрахунків параметрів керування джерела живлення системи взаємного навантаження машин постійного струму. Поставлена задача вирішується шляхом використання гібридної нейронної системи, для побудови якої: синтезується математична модель системи тиристорний перетворювач - двигун постійного струму незалежного збудження (ТП - ДПСНЗ) з регулюванням магнітного потоку; для формування навчальної вибірки на математичній моделі експериментально підбираються складові сигналу керування, при яких формується навантажувальний режим випробуваного двигуна; за навчальною вибіркою будуються графіки вхідних параметрів двигуна, за якими визначаються кількість та вид функцій приналежності; за допомогою програми Fuzzy Logic Toolbox математичного пакету Matlab, виконується налаштування гібридної системи. Корисна модель пояснюється кресленнями, де на фіг. 1 наведені графіки зміни вхідних параметрів двигунів постійного струму; на фіг. 2 наведена структура гібридної мережі; на фіг. 3 наведені графіки зміни похибки навчання; на фіг. 4 наведена схема математичної моделі для перевірки роботи контролера. Спосіб реалізується наступним чином. Під час випробування електричних машин у режимах динамічного навантаження виникає необхідність у розрахунку та підборі керуючих впливів, що формуються та подаються на системи керування силових тиристорних перетворювачів. В режимах динамічного навантаження сигнал керування складається із постійної складової U0 та суми гармонічних складових ΣUm Uк t U0 55 U m 1 m sin t , (1) 1 UA 69961 U kФ L J 5 я де - частота навантаження; Lя - індуктивність якоря двигуна; kФ - магнітний поток; J - момент інерції двигуна. У пропонованому способі використовуються три гібридні нейронні системи, призначенням яких є розрахунок амплітудних значень гармонічних складових напруги керування тиристорним перетворювачем для конкретного електричного двигуна та способу реалізації навантажувального режиму. Формування навчальної вибірки, яка необхідна для побудови гібридної нейронної системи, формується за допомогою експериментів, в яких параметри сигналу керування підбираються таким шляхом, щоб мінімізувати функціонал якості: Q 10 I 2 2 dt , (2) де I 15 20 25 30 35 40 45 50 Ін Іеф н сер н ; - відносне розузгодження поточних значень струму та кутової швидкості двигуна; Іеф - ефективне значення струму двигуна, А; Ін - номінальне значення струму, А; -1 ωн - номінальне значення кутової швидкості, с ; -1 ωсер - середнє значення кутової швидкості, с ; 1 - ваговий коефіцієнт. При цьому враховується наступне обмеження: 0,8≤Δω≤1,2. Експериментальний підбір параметрів керування проводиться на математичній моделі, побудованій у пакеті Matlab. Виконується моделювання та формуються режими навантаження для ряду двигунів постійного струму потужністю від 0,45 до 200 кВт. За отриманими даними будуються три гібридні нейронні системи, які відображають залежність між вхідними параметрами двигуна постійного струму (потужність двигуна Рн, номінальний струм якоря Ін, частота навантаження двигуна Ω), та розрахованими параметрами керування (постійне значення напруги керування силовим перетворювачем в якірному колі Uпос., постійне значення напруги керування силовим перетворювачем в колі обмотки збудження U0, змінне значення напруги керування силовим перетворювачем в колі обмотки збудження U1). Гібридні нейронні системи побудовані за допомогою програмного засобу Fuzzy Logic Toolbox математичного пакету Matlab, а саме ANFIS-редактора. Для визначення параметрів гібридних нейронних систем, для кожного вхідного параметру Рн, Ін, Ω будуються залежності (фіг. 1). За формою кривої та місцем різкої зміни вхідного параметру, визначається необхідна кількість та вид вхідних термів. Задаються параметри настроювання гібридної нейронної системи: - кількість входів; - кількість виходів; - кількість вхідних термів; - тип вхідних термів; - тип виходів. Після чого програма автоматично будує структуру створюваної гібридної нейронної системи (фіг. 2). Для навчання гібридної нейронної системи задаються параметри: - кінцева похибка, за якою припиняється навчання; - метод оптимізації; - кількість циклів навчання. Після чого проводиться навчання. Графіки зміни похибки навчання наведені на фіг. 3: а) похибка гібридної нейронної системи для розрахунку параметру Uпос.; б) похибка гібридної нейронної системи для розрахунку параметру U0; в) похибка гібридної нейронної системи для розрахунку параметру U1. Для перевірка роботи контролера, побудованого за методом гібридної нейронної системи, використовується математична модель, зображена на фіг. 4, в якій на вхід кожного контролера (блоки Fuzzy Logic Controller) подаються значення вхідних параметрів Pн, Ін, Ω. Значення розрахованих параметрів відображаються на цифрових індикаторах Uпoc., U0, U1. Розрахунок похибки контролера проводиться за формулою: Ін 2 UA 69961 U Хпоч. Хрозр. Хпоч. 100% , (3) де Хпоч. - експериментально підібране значення параметру керування; Хрозр. - розраховане контролером значення. Результати перевірки роботи контролера наведені в таблиці. 5 Таблиця Результати перевірки роботи контролера Рн, кВт 0,45 1 1,5 3,2 6 11 25 55 75 100 125 200 10 Підібрані дані Uпoc., В U0, В U1, В 1,37 1,8 2,6 1,1 1 5 1 1,01 6 1,9 0,9 9,8 1,2 0,44 9,6 9,8 4,1 7 10 3,05 7 9,5 1,46 3 8,45 1,47 4 7 0,9 4,5 6,5 0,75 5 5,25 0,45 4,5 Розраховані контролером Uпос., в U0, В U1, В 1,378 1,798 2,659 1,14 1,003 5,208 1,008 1,006 6,021 1,859 0,9063 9,51 1,192 0,4403 9,57 9,771 4,093 6,972 10,02 3,053 7,062 9,507 1,46 3,019 8,529 1,469 3,971 7,003 0,9002 4,508 6,5 0,7499 5 5,25 0,45 4,5 Похибка ΔUпос., % ΔU0, % 0,58 0,11 3,63 0,3 0,8 0,39 2,15 0,7 0,667 0,068 0,29 0,17 0,2 0,098 0,074 0 0,935 0,068 0,043 0,022 0 0,013 0 0 AU1, % 2,26 4,16 0,35 2,95 0,312 0,4 0,88 0,633 0,725 0,178 0 0 Результати розрахунку керуючих впливів за допомогою гібридної нейронної системи показує, що максимальне значення похибки для складових Uпoc., U0, U1 не перевищує відповідно 3,63 %, 0,7 %, 4,16 %. Середнє значення похибки для кожної складової не перевищує 1,07 % (Uпос.=0,76 %, U0=0,16 %, U1=1,07 %), що значно точніше у порівнянні з прототипом, у якого максимальне значення похибки для гармонічних складових U0, U1 складає відповідно 46 %, 14 %, а середнє значення похибки для кожної гармонічної складової складає 6,7 %, 3,5 %. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 Спосіб розрахунку параметрів керування силовим перетворювачем в системі взаємного навантаження машин постійного струму, при якому формується режим навантаження з впливом на коло обмотки збудження і задається постійною та змінними складовими сигналу керування, який відрізняється тим, що для розрахунку параметрів керування використовується гібридна нейронна система, а для розрахунку кожного з параметрів керування використовується окрема система. 3 UA 69961 U 4 UA 69961 U Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for calculation of control parameters by power converter in the loading-back system of dc machines
Автори англійськоюLomonos Andrii Ivanovych, Sukhoruk Serhii Valentynovych
Назва патенту російськоюСпособ расчута параметров управления силовым преобразователем в системе взаимной нагрузки машин постоянного тока
Автори російськоюЛомонос Андрей Иванович, Сухорук Сергей Валентинович
МПК / Мітки
МПК: G01R 31/00, G06F 1/18
Мітки: машин, керування, постійного, розрахунку, взаємного, спосіб, параметрів, силовим, навантаження, перетворювачем, системі, струму
Код посилання
<a href="https://ua.patents.su/7-69961-sposib-rozrakhunku-parametriv-keruvannya-silovim-peretvoryuvachem-v-sistemi-vzaehmnogo-navantazhennya-mashin-postijjnogo-strumu.html" target="_blank" rel="follow" title="База патентів України">Спосіб розрахунку параметрів керування силовим перетворювачем в системі взаємного навантаження машин постійного струму</a>
Стенд взаємного навантаження електричних машин постійного струму послідовного збудження
Номер патенту: 51327
Опубліковано: 12.07.2010
Автор: Афанасов Андрій Михайлович
МПК: H02K 51/00
Мітки: струму, збудження, постійного, машин, електричних, взаємного, стенд, послідовного, навантаження
Формула / Реферат:
Стенд взаємного навантаження електричних машин постійного струму послідовного збудження, який містить електричні двигун та генератор, вали яких з'єднані між собою та валом додаткового приводного двигуна, який відрізняється тим, що обмотки якоря та збудження генератора з'єднані послідовно та підключені до входу трансформатора постійної напруги з коефіцієнтом трансформації, більшим одиниці, до виходу якого підключені обмотки якоря та збудження...
Спосіб взаємного навантаження машин постійного струму без механічного з’єднання валів
Номер патенту: 41089
Опубліковано: 12.05.2009
Автори: Родькін Дмитро Йосипович, Мастєровий Віктор Яковлевич, Ломонос Андрій Іванович, Воробейчик Олег Станіславович, Бялобрежський Олексій Володимирович
МПК: G01R 31/34
Мітки: машин, струму, валів, механічного, взаємного, постійного, навантаження, спосіб, з'єднання
Формула / Реферат:
Спосіб взаємного навантаження машин постійного струму без механічного з'єднання валів, при якому встановлюють амплітуду напруги якірного кола електричних машин на рівні заданої, задають постійну і змінну складові напруги якірного кола випробуваного двигуна і постійну та змінну складові напруги кола збудження, змінюють струм збудження випробуваного і допоміжного двигунів, регулюють струм якоря випробуваного двигуна з ефективним значенням,...
Пристрій взаємного навантаження машин постійного струму без механічного з’єднання валів
Номер патенту: 55009
Опубліковано: 25.11.2010
Автори: Ломонос Андрій Іванович, Бялобрежський Олексій Володимирович, Сулим Андрій Олександрович
МПК: H02K 15/00
Мітки: взаємного, пристрій, валів, з'єднання, постійного, механічного, навантаження, машин, струму
Формула / Реферат:
Пристрій взаємного навантаження машин постійного струму без механічного з'єднання валів, що містить силовий перетворювач, з'єднаний через датчик струму з якірними колами випробуваної машини і машини-компенсатора, напруга яких контролюється датчиками, керовані перетворювачі з'єднані через датчики струму з обмотками збудження, датчики швидкості обертання, який відрізняється тим, що додатково містить керовані транзисторні перетворювачі,...
Стенд взаємного навантаження тягових електричних двигунів постійного струму
Номер патенту: 50880
Опубліковано: 25.06.2010
Автор: Афанасов Андрій Михайлович
МПК: G01M 15/00
Мітки: тягових, навантаження, двигунів, постійного, стенд, струму, взаємного, електричних
Формула / Реферат:
Стенд взаємного навантаження тягових електричних двигунів постійного струму, який містить електричний двигун та генератор, що випробуються, вали яких з'єднані між собою та валом додаткового привідного двигуна, а обмотки якорів та збудження з'єднані послідовно в замкнутому електричному колі, який відрізняється тим, що паралельно обмотці збудження двигуна підключено регулятор послаблення збудження.
Спосіб моделювання технологічного навантаження при випробуванні машин постійного струму
Номер патенту: 70516
Опубліковано: 15.10.2004
Автори: Родькін Дмитро Йосипович, Скворцов Ігор Валерійович, Зачепа Юрій Володимирович, Артеменко Артем Миколайович, Мастєровий Віктор Яковлевич
МПК: G01R 31/24
Мітки: моделювання, постійного, технологічного, машин, спосіб, струму, навантаження, випробуванні
Формула / Реферат:
1. Спосіб навантаження електричного двигуна постійного струму незалежного збудження, що полягає в створенні струмового навантаження шляхом підключення якоря двигуна до джерела низькочастотної змінної напруги, вимірюванні швидкості та струму якоря, нормуванні розрахункового струмового навантаження шляхом зміни амплітуди та частоти низькочастотної змінної напруги, який відрізняється тим, що для підвищення достовірності процесу навантаження та...
Попередній патент: Вібропрес для формування виробів з металевих порошків
Наступний патент: Тренажер для ніг
Випадковий патент: Тепловидільний елемент чи керуючий елемент для ядерного реактора