Гіротеодоліт
Номер патенту: 73373
Опубліковано: 25.09.2012
Автори: Мураховський Сергій Анатолійович, Хоца Артем Анатолійович



Формула / Реферат
Гіротеодоліт, який містить корпус, всередині якого підвішений чутливий елемент, датчик кута, що визначає кут повороту чутливого елемента відносно корпуса в азимуті, та датчик моменту, що створює керуючий момент, який відрізняється тим, що гіротеодоліт додатково містить обчислювальний блок, вхід якого з'єднаний з виходом датчика кута, і в якому визначається оцінка кутової швидкості повороту чутливого елемента відносно корпуса.
Текст
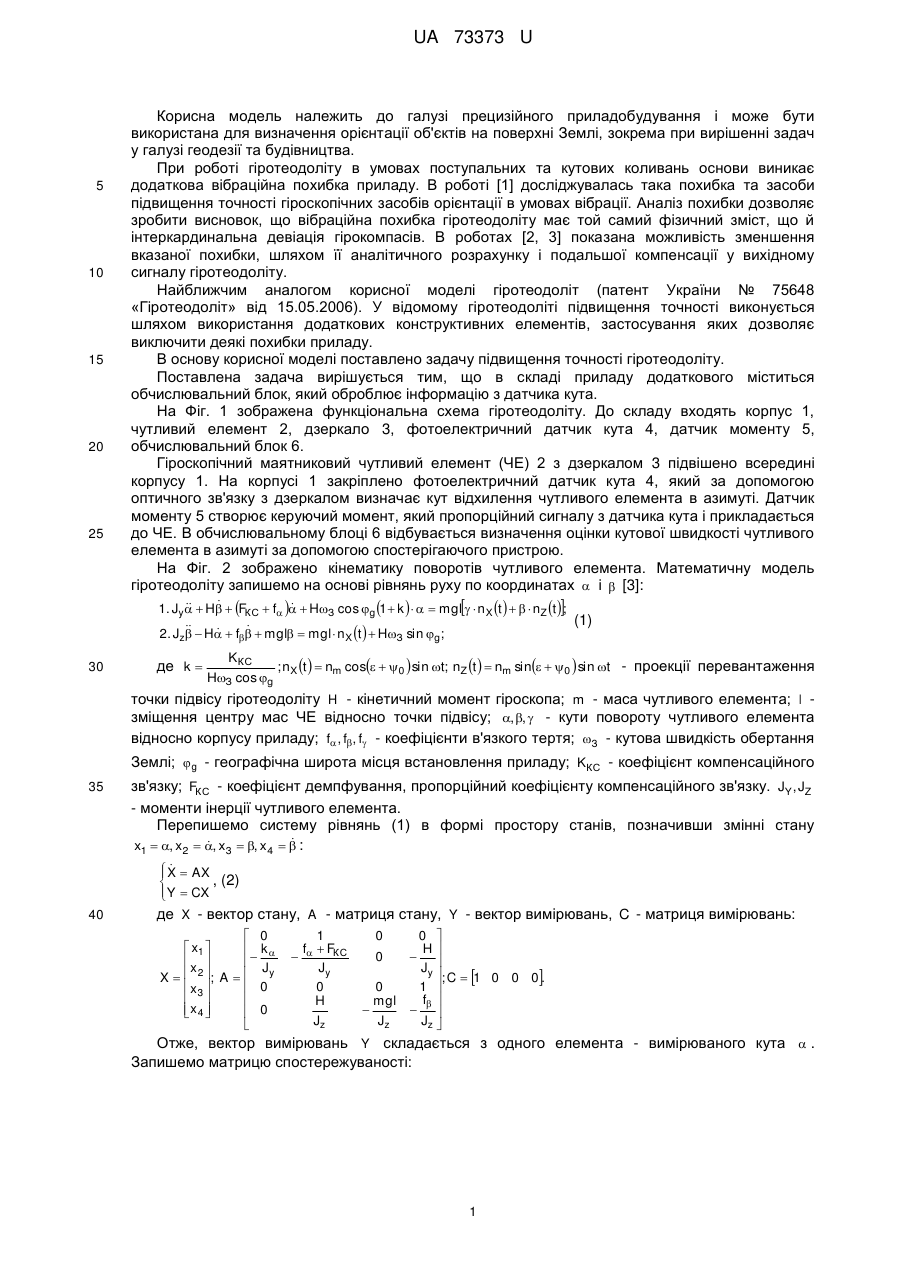
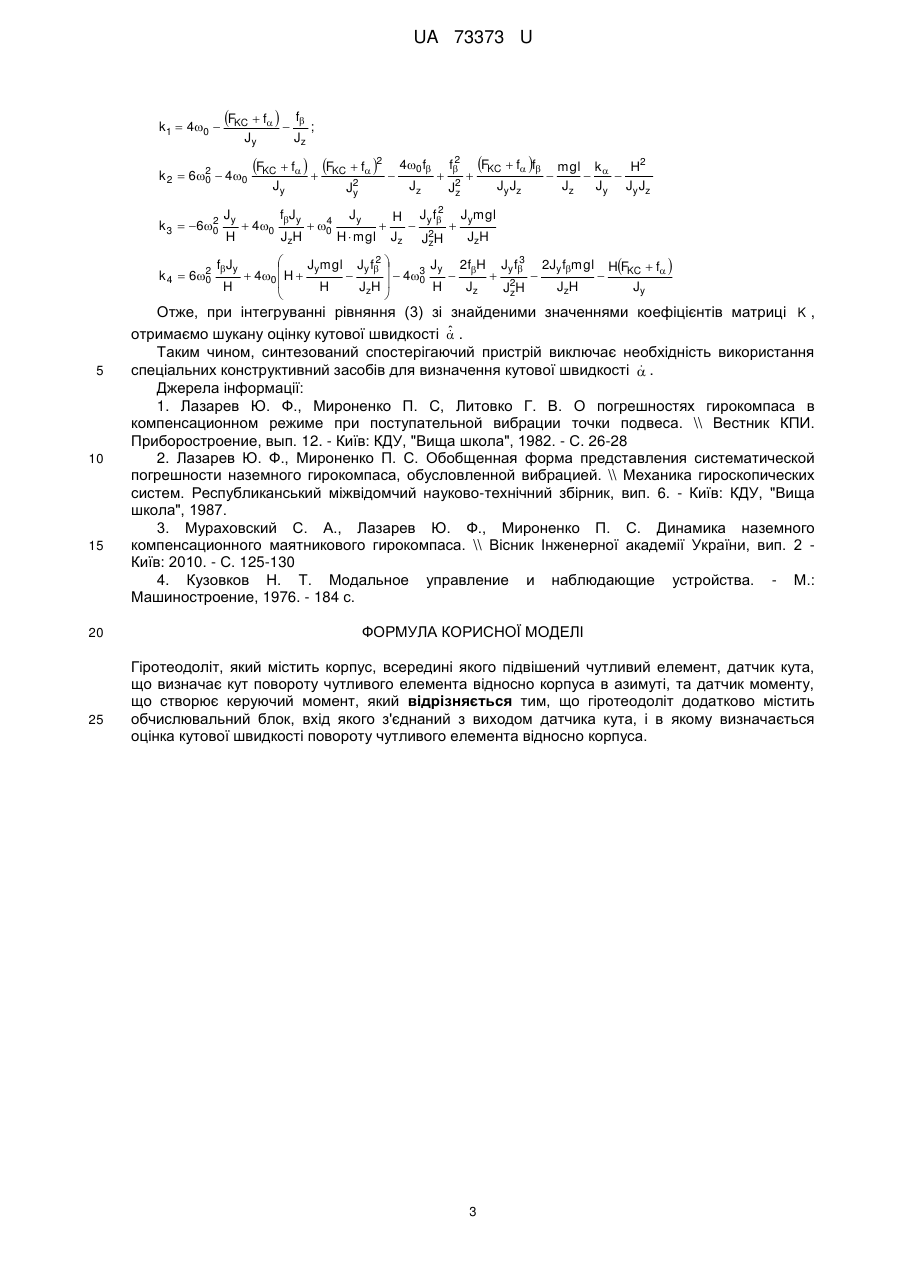
Реферат: UA 73373 U UA 73373 U 5 10 15 20 25 Корисна модель належить до галузі прецизійного приладобудування і може бути використана для визначення орієнтації об'єктів на поверхні Землі, зокрема при вирішенні задач у галузі геодезії та будівництва. При роботі гіротеодоліту в умовах поступальних та кутових коливань основи виникає додаткова вібраційна похибка приладу. В роботі [1] досліджувалась така похибка та засоби підвищення точності гіроскопічних засобів орієнтації в умовах вібрації. Аналіз похибки дозволяє зробити висновок, що вібраційна похибка гіротеодоліту має той самий фізичний зміст, що й інтеркардинальна девіація гірокомпасів. В роботах [2, 3] показана можливість зменшення вказаної похибки, шляхом її аналітичного розрахунку і подальшої компенсації у вихідному сигналу гіротеодоліту. Найближчим аналогом корисної моделі гіротеодоліт (патент України № 75648 «Гіротеодоліт» від 15.05.2006). У відомому гіротеодоліті підвищення точності виконується шляхом використання додаткових конструктивних елементів, застосування яких дозволяє виключити деякі похибки приладу. В основу корисної моделі поставлено задачу підвищення точності гіротеодоліту. Поставлена задача вирішується тим, що в складі приладу додаткового міститься обчислювальний блок, який оброблює інформацію з датчика кута. На Фіг. 1 зображена функціональна схема гіротеодоліту. До складу входять корпус 1, чутливий елемент 2, дзеркало 3, фотоелектричний датчик кута 4, датчик моменту 5, обчислювальний блок 6. Гіроскопічний маятниковий чутливий елемент (ЧЕ) 2 з дзеркалом 3 підвішено всередині корпусу 1. На корпусі 1 закріплено фотоелектричний датчик кута 4, який за допомогою оптичного зв'язку з дзеркалом визначає кут відхилення чутливого елемента в азимуті. Датчик моменту 5 створює керуючий момент, який пропорційний сигналу з датчика кута і прикладається до ЧЕ. В обчислювальному блоці 6 відбувається визначення оцінки кутової швидкості чутливого елемента в азимуті за допомогою спостерігаючого пристрою. На Фіг. 2 зображено кінематику поворотів чутливого елемента. Математичну модель гіротеодоліту запишемо на основі рівнянь руху по координатах і [3]: 1. Jy H FКС f HЗ cos g 1 k mgl n X t nZ t ; 2. Jz H f mgl mgl n X t HЗ sin g; 30 де k (1) KКС ; nX t nm cos 0 sin t; nZ t nm sin 0 sin t - проекції перевантаження HЗ cos g точки підвісу гіротеодоліту H - кінетичний момент гіроскопа; m - маса чутливого елемента; l зміщення центру мас ЧЕ відносно точки підвісу; , , - кути повороту чутливого елемента відносно корпусу приладу; f , f, f - коефіцієнти в'язкого тертя; З - кутова швидкість обертання Землі; g - географічна широта місця встановлення приладу; KКС - коефіцієнт компенсаційного 35 зв'язку; FКС - коефіцієнт демпфування, пропорційний коефіцієнту компенсаційного зв'язку. JY, JZ - моменти інерції чутливого елемента. Перепишемо систему рівнянь (1) в формі простору станів, позначивши змінні стану x1 , x2 , x3 , x 4 : X AX , (2) Y CX 40 де X - вектор стану, A - матриця стану, Y - вектор вимірювань, C - матриця вимірювань: 0 x1 k J x2 X ; A y x3 0 x 4 0 0 H 0 Jy ; C 1 0 0 0. 0 1 f mgl Jz Jz Отже, вектор вимірювань Y складається з одного елемента - вимірюваного кута . 1 f FКС Jy 0 H Jz 0 Запишемо матрицю спостережуваності: 1 UA 73373 U 1 0 T T T T 2 T T 3 T Q C A C A C A C 0 0 k f FКС 2 2 k f FКС H J Jy Jz J2 y y . mgl H Jy Jz Hf FКС J2 y k Jy 0 1 f FКС Jy 0 0 J2 y 0 H Jy Ранг матриці спостережуваності рівний порядку об'єкта rankQ 4 , отже, за виміряним вектором Y можливо оцінити всі змінні стану об'єкта. Спостерігаючий пристрій, при відсутності збурень, описується рівнянням: 5 10 15 20 ˆ ˆ X A KCX KY , (3) ˆ де X - вектор оцінок змінних стану, K - матриця коефіцієнтів спостерігаючого пристрою. ˆ x1 k1 ˆ k x2 ˆ X ; K 2 . x3 k 3 ˆ k 4 x 4 ˆ Коефіцієнти матриці K вибираються таким чином, щоб власні значення спостерігача, що визначається рівнянням (3), знаходились в певних заздалегідь заданих точках на комплексній площині. Характеристичне рівняння спостерігача має вигляд: detpE A KC 0 ; (4) де E - одинична матриця, відповідної розмірності, p - оператор Лапласа. Таким чином, задача синтезу спостерігаючого пристрою зводиться до визначення матриці коефіцієнтів K . Оберемо біноміальний розподіл коренів характеристичного рівняння [4], тоді повинна виконуватись рівність: detpE A KC p 0 4 ; (5) тобто характеристичне рівняння спостерігаючого пристрою буде мати один від'ємний дійсний корінь p 0 кратності 4. Підставляючи матриці A, K, E і C в ліву частину виразу (5) отримаємо: FKC f Jz fJy detpE A KC p4 k1 p3 Jy Jz 2 FKC f f Jymgl k Jz H k1 FKC f Jz fJy k 2 p2 Jy Jz FKC f mgl k f k1FKC f f H2 Jymgl k 2fJy k 4JzH Jy Jz p k mgl k1FKC f mgl k 2Jymgl k 3H mgl Jy Jz 2 4 Права частина виразу (5): p 0 4 p4 40p3 60p2 43p 0 . 0 Прирівнюючи коефіцієнти при рівних степенях р в лівій і правій частині виразу (5), можна визначити коефіцієнти матриці K : 2 UA 73373 U k1 40 FKC f f ; Jy 2 k 2 60 40 2 k 3 60 2 k 4 60 5 10 15 20 25 Jy H Jz FKC f FKC f 2 40f f2 FKC f f mgl k J2 y Jy 40 fJy JzH 4 0 Jz Jy H mgl J2 z Jy Jz Jz Jy H2 Jy Jz 2 H Jy f Jymgl 2 Jz JzH JzH 2 3 Jymgl Jy f 43 Jy 2fH Jy f 2Jy fmgl HFKC f 40 H 0 H H JzH H Jz JzH Jy J2H z fJy Отже, при інтегруванні рівняння (3) зі знайденими значеннями коефіцієнтів матриці K , ˆ отримаємо шукану оцінку кутової швидкості . Таким чином, синтезований спостерігаючий пристрій виключає необхідність використання спеціальних конструктивний засобів для визначення кутової швидкості . Джерела інформації: 1. Лазарев Ю. Ф., Мироненко П. С, Литовко Г. В. О погрешностях гирокомпаса в компенсационном режиме при поступательной вибрации точки подвеса. \\ Вестник КПИ. Приборостроение, вып. 12. - Київ: КДУ, "Вища школа", 1982. - С. 26-28 2. Лазарев Ю. Ф., Мироненко П. С. Обобщенная форма представления систематической погрешности наземного гирокомпаса, обусловленной вибрацией. \\ Механика гироскопических систем. Республиканський міжвідомчий науково-технічний збірник, вип. 6. - Київ: КДУ, "Вища школа", 1987. 3. Мураховский С. А., Лазарев Ю. Ф., Мироненко П. С. Динамика наземного компенсационного маятникового гирокомпаса. \\ Вісник Інженерної академії України, вип. 2 Київ: 2010. - С. 125-130 4. Кузовков Н. Т. Модальное управление и наблюдающие устройства. - М.: Машиностроение, 1976. - 184 с. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Гіротеодоліт, який містить корпус, всередині якого підвішений чутливий елемент, датчик кута, що визначає кут повороту чутливого елемента відносно корпуса в азимуті, та датчик моменту, що створює керуючий момент, який відрізняється тим, що гіротеодоліт додатково містить обчислювальний блок, вхід якого з'єднаний з виходом датчика кута, і в якому визначається оцінка кутової швидкості повороту чутливого елемента відносно корпуса. 3 UA 73373 U Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюGyro-theodolite
Автори англійськоюMurakhovskyi Serhii Anatoliiovych, Khotsa Artem Anatoliiovych
Назва патенту російськоюГиротеодолит
Автори російськоюМураховский Сергей Анатолиевич, Хоца Артем Анатолиевич
МПК / Мітки
МПК: G01C 19/00
Мітки: гіротеодоліт
Код посилання
<a href="https://ua.patents.su/6-73373-giroteodolit.html" target="_blank" rel="follow" title="База патентів України">Гіротеодоліт</a>
Гіротеодоліт

Номер патенту: 75648
Опубліковано: 15.05.2006
Автори: Дітюк-Сніцаренко Павло Степанович, Сичиков Олександр Олександрович, Сидоренко Юрій Захарович, Копитько Валерій Павлович, Баснін Борис Опанасович, Шуть Володимир Петрович, Вірко Володимир Дмитрович, Голік Марат Миколайович, Ніжник Ігор Іванович, Єсипенко Станіслав Іванович, Сосуновський Олександр Сергійович, Бузанов Віктор Іванович
МПК: G01C 19/00
Мітки: гіротеодоліт
Формула / Реферат:
1. Гіротеодоліт, до складу якого входить корпус, поворотний відносно вертикальної осі гіроблок, підвішений в гіроблоці гіроскопічний маятниковий чутливий елемент з вертикальним дзеркалом, закріплений на гіроблоці фотоелектричний автоколіматор з можливістю його оптичного зв'язку з дзеркалом чутливого елемента, привід розвороту гіроблока відносно корпусу, теодолітна алідада, виконана з можливістю її повороту відносно вертикальної осі і оснащена...
Гіротеодоліт
Номер патенту: 14539
Опубліковано: 09.01.1997
Автори: Голік Марат Миколайович, Дітюк-Сніцаренко Павло Степанович
МПК: G01C 19/00
Мітки: гіротеодоліт
Формула / Реферат:
Гиротеодолит, содержащий алидаду с колонками и с возможностью поворота вокруг вертикальной оси, цилиндрический элемент с возможностью поворота вокруг горизонтальной оси, размещенный в колонках алидады, зрительную трубу, закрепленную на цилиндрическом элементе, корпус гироблока, гироскопический чуствительный элемент с зеркалом, подвешенный в корпусе гироблока, датчик угловых положений чувствительного элемента, преимущественно...
Датчик температури
Номер патенту: 22512
Опубліковано: 25.04.2007
Автори: Баранич Юлія Вікторівна, Харченко Євген Іванович, Калюжний Геннадій Сергійович, Гусєнцова Єлизавета Сергіївна, Коваленко Алім Олексійович, Лиштван Олена Юріївна
МПК: F15C 1/00
Мітки: датчик, температури
Формула / Реферат:
Датчик температури, що містить чутливий елемент, напівпровідниковий лазер, світловод і вихідний каскад, який відрізняється тим, що як напівпровідниковий лазер застосовано лазер, потужність якого регулюється аналоговим сигналом чутливого елемента.
Компенсаційний датчик зенітного кута

Номер патенту: 26202
Опубліковано: 10.09.2007
Автори: Садовникова Олександра Володимирівна, Пономарьова Олена Анатоліївна, Ковшов Генадій Миколайович
МПК: E21B 47/02
Мітки: зенітного, компенсаційний, датчик, кута
Формула / Реферат:
Компенсаційний датчик зенітного кута, що містить корпус, котушку індуктивності, осердя, яке являє собою чутливий елемент датчика у вигляді тонкої берилієвої струни з пермалоєвим покриттям, закріпленої з одного кінця, який відрізняється тим, що датчик додатково обладнаний ланцюгом зворотного зв'язку з електромагнітом, а на вільному кінці чутливого елемента закріплений постійний магніт.
Прилад захисту крана
Номер патенту: 2732
Опубліковано: 16.08.2004
Автори: Бродяк Любомир Михайлович, Коваленко Володимир Ілліч, Волков Володимир Петрович, Сосяк Богдан Миколайович, Сея Руслан Едуардович, Лисяк Богдан Ростиславович, Степанчак Ігор Мирославович
МПК: B66C 23/88
Формула / Реферат:
Прилад захисту крана, що містить датчик кута нахилу стріли, датчик довжини стріли, датчик кута повороту поворотної рами крана, датчик навантаження крана, кінцеві вимикачі, блок керування робочими операціями крана, під'єднаний до обчислювача, модуль накопичування, силові ключі і цифрове табло, який відрізняється тим, що обчислювач виконаний з під'єднаним єдиним інтерфейсом, до якого під'єднані додаткові обчислювачі з додатковими датчиками,...
Попередній патент: Спосіб орієнтації штучних супутників землі
Наступний патент: Віброімпульсний генератор коливань тиску рідини
Випадковий патент: Спосіб виробництва колектора