Гіротеодоліт
Номер патенту: 14539
Опубліковано: 09.01.1997
Автори: Голік Марат Миколайович, Дітюк-Сніцаренко Павло Степанович
Формула / Реферат
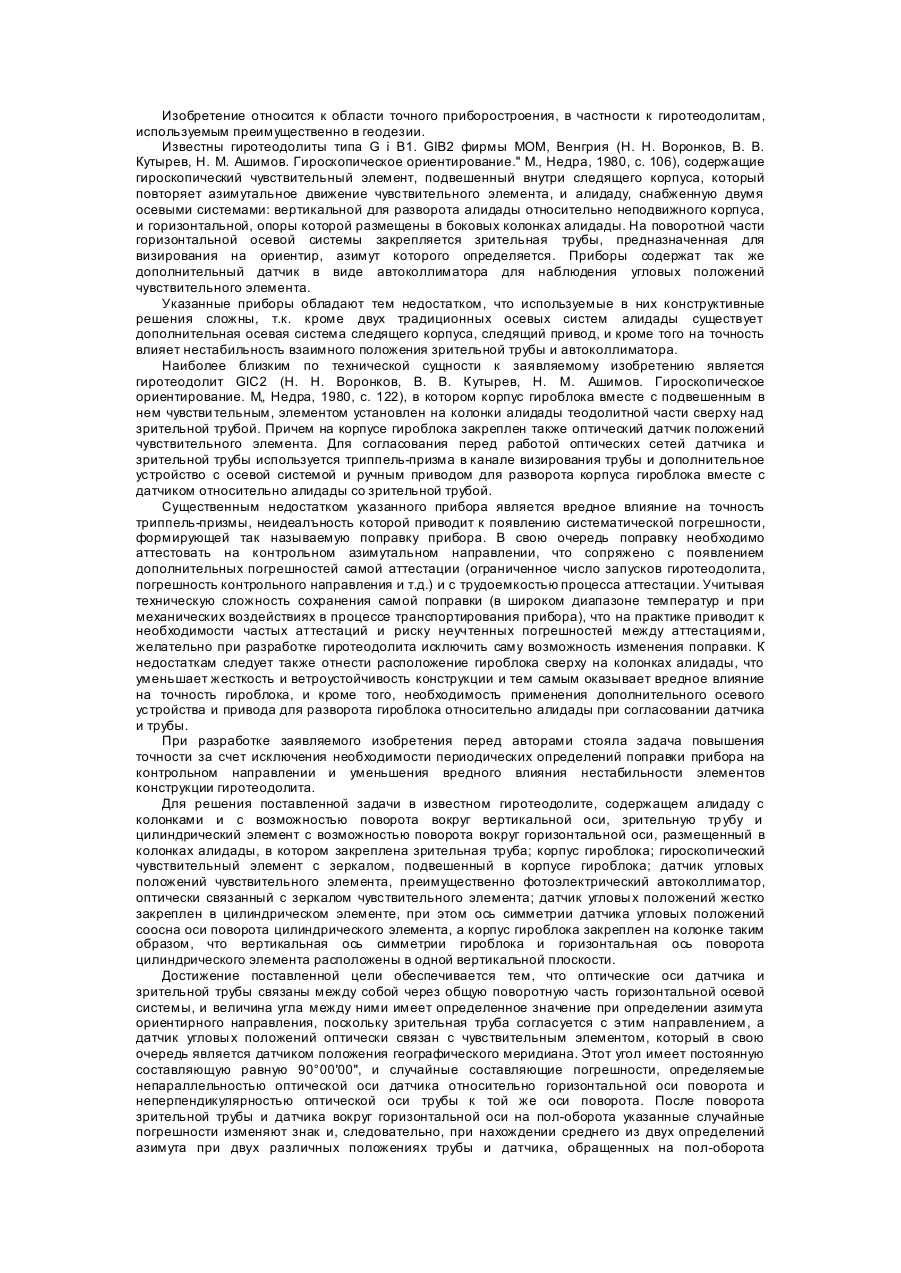
Гиротеодолит, содержащий алидаду с колонками и с возможностью поворота вокруг вертикальной оси, цилиндрический элемент с возможностью поворота вокруг горизонтальной оси, размещенный в колонках алидады, зрительную трубу, закрепленную на цилиндрическом элементе, корпус гироблока, гироскопический чуствительный элемент с зеркалом, подвешенный в корпусе гироблока, датчик угловых положений чувствительного элемента, преимущественно фотоэлектрический автоколлиматор, оптически связанный с зеркалом чувствительного элемента, отличающийся тем, что в нем датчик угловых положений жестко закреплен в цилиндрическом элементе, при этом ось симметрии датчика угловых положений соосна оси поворота цилиндрического элемента, а корпус гироблока закреплен на колонке таким образом, что вертикальная ось симметрии гироблока и горизонтальная ось поворота цилиндрического элемента расположены в одной вертикальной плоскости.
Текст
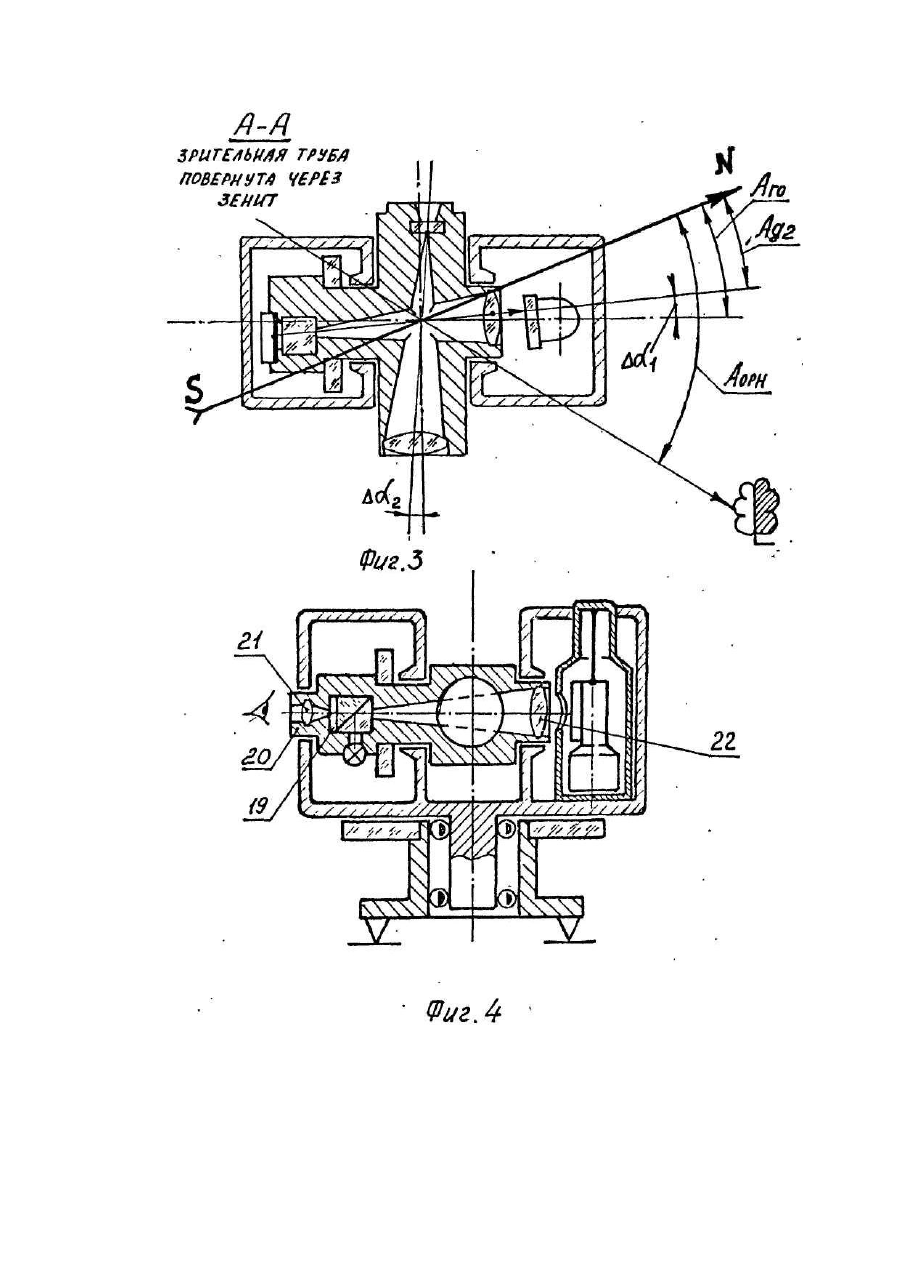
Изобретение относится к области точного приборостроения, в частности к гиротеодолитам, используемым преимущественно в геодезии. Известны гиротеодолиты типа G і В1. GIB2 фирмы MOM, Венгрия (Н. Н. Воронков, В. В. Кутырев, Н. М. Ашимов. Гироскопическое ориентирование." М., Недра, 1980, с. 106), содержащие гироскопический чувствительный элемент, подвешенный внутри следящего корпуса, который повторяет азимутальное движение чувствительного элемента, и алидаду, снабженную двумя осевыми системами: вертикальной для разворота алидады относительно неподвижного корпуса, и горизонтальной, опоры которой размещены в боковых колонках алидады. На поворотной части горизонтальной осевой системы закрепляется зрительная трубы, предназначенная для визирования на ориентир, азимут которого определяется. Приборы содержат так же дополнительный датчик в виде автоколлиматора для наблюдения угловых положений чувствительного элемента. Указанные приборы обладают тем недостатком, что используемые в них конструктивные решения сложны, т.к. кроме двух традиционных осевых систем алидады существует дополнительная осевая система следящего корпуса, следящий привод, и кроме того на точность влияет нестабильность взаимного положения зрительной трубы и автоколлиматора. Наиболее близким по технической сущности к заявляемому изобретению является гиротеодолит GIC2 (Н. Н. Воронков, В. В. Кутырев, Н. М. Ашимов. Гироскопическое ориентирование. М„ Недра, 1980, с. 122), в котором корпус гироблока вместе с подвешенным в нем чувстви тельным, элементом установлен на колонки алидады теодолитной части сверху над зрительной трубой. Причем на корпусе гироблока закреплен также оптический датчик положений чувствительного элемента. Для согласования перед работой оптических сетей датчика и зрительной трубы используется триппель-призма в канале визирования трубы и дополнительное устройство с осевой системой и ручным приводом для разворота корпуса гироблока вместе с датчиком относительно алидады со зрительной трубой. Существенным недостатком указанного прибора является вредное влияние на точность триппель-призмы, неидеалъность которой приводит к появлению систематической погрешности, формирующей так называемую поправку прибора. В свою очередь поправку необходимо аттестовать на контрольном азимутальном направлении, что сопряжено с появлением дополнительных погрешностей самой аттестации (ограниченное число запусков гиротеодолита, погрешность контрольного направления и т.д.) и с трудоемкостью процесса аттестации. Учитывая техническую сложность сохранения самой поправки (в широком диапазоне температур и при механических воздействиях в процессе транспортирования прибора), что на практике приводит к необходимости частых аттестаций и риску неучтенных погрешностей между аттестациями, желательно при разработке гиротеодолита исключить саму возможность изменения поправки. К недостаткам следует также отнести расположение гироблока сверху на колонках алидады, что уменьшает жесткость и ветроустойчивость конструкции и тем самым оказывает вредное влияние на точность гироблока, и кроме того, необходимость применения дополнительного осевого устройства и привода для разворота гироблока относительно алидады при согласовании датчика и трубы. При разработке заявляемого изобретения перед авторами стояла задача повышения точности за счет исключения необходимости периодических определений поправки прибора на контрольном направлении и уменьшения вредного влияния нестабильности элементов конструкции гиротеодолита. Для решения поставленной задачи в известном гиротеодолите, содержащем алидаду с колонками и с возможностью поворота вокруг вертикальной оси, зрительную тр убу и цилиндрический элемент с возможностью поворота вокруг горизонтальной оси, размещенный в колонках алидады, в котором закреплена зрительная труба; корпус гироблока; гироскопический чувствительный элемент с зеркалом, подвешенный в корпусе гироблока; датчик угловых положений чувствительного элемента, преимущественно фотоэлектрический автоколлиматор, оптически связанный с зеркалом чувствительного элемента; датчик угловы х положений жестко закреплен в цилиндрическом элементе, при этом ось симметрии датчика угловых положений соосна оси поворота цилиндрического элемента, а корпус гироблока закреплен на колонке таким образом, что вертикальная ось симметрии гироблока и горизонтальная ось поворота цилиндрического элемента расположены в одной вертикальной плоскости. Достижение поставленной цели обеспечивается тем, что оптические оси датчика и зрительной трубы связаны между собой через общую поворотную часть горизонтальной осевой системы, и величина угла между ними имеет определенное значение при определении азимута ориентирного направления, поскольку зрительная труба согласуется с этим направлением, а датчик угловы х положений оптически связан с чувствительным элементом, который в свою очередь является датчиком положения географического меридиана. Этот угол имеет постоянную составляющую равную 90°00'00", и случайные составляющие погрешности, определяемые непараллельностью оптической оси датчика относительно горизонтальной оси поворота и неперпендикулярностью оптической оси трубы к той же оси поворота. После поворота зрительной трубы и датчика вокруг горизонтальной оси на пол-оборота указанные случайные погрешности изменяют знак и, следовательно, при нахождении среднего из двух определений азимута при двух различных положениях трубы и датчика, обращенных на пол-оборота относительно горизонтальной оси поворота, указанные случайные погрешности компенсируются. В предложенном гиротеодолите исключаются требования к стабильности положения элементов его конструкции в течение всего периода эксплуатации. Требования относительной стабильности распространяются только на время одного определения азимута при двух различных положениях трубы, что легко реализовать на практике, учитывая относительно малое время работы прибора. Кроме того, применение относительно простого и малогабаритного фотоэлектрического датчика угловы х положений чувствительного элемента, жестко закрепленного в горизонтальной оси поворота зрительной трубы, в непосредственной близости от объекта наблюдений - гироблока с чувствительным элементом, установленного в боковой колонке алидады, позволяет решить задачу повышения точности без ряда традиционных оптико-механических устройство при одновременном повышении жесткости и ветроустойчивости конструкции. Необходимо также отметить, что обеспечивается упрощение конструкции гиротеодолита, т.к. используется только существующая во все х теодолитах горизонтальная ось поворота зрительной трубы и исключается необходимость в трипель-призме и приводе для разворота гироблока относительно алидады. На фиг. 1 приведена схема предлагаемого гиротеодолита; на фиг. 2 и 3 - горизонтальные сечения того же гиротеодолита при двух различных положениях зрительной трубы относительно горизонтальной оси; на фиг. 4 - схема одного из возможных вариантов предлагаемого гиротеодолита. Гиротеодо-лит на фиг. 1 включает в себя традиционную теодолитную часть, алидада 2 которой установлена с возможностью поворота относительно неподвижного корпуса на вертикальной осевой системе 1. Алидада содержит горизонтальную осевую систему в виде цилиндрического элемента оси 6, установленного на подшипниках 7 в боковых колонках 8 алидады. На оси 6 жестко закреплена зрительная труба 9, чем обеспечивается возможность наклонного визирования на ориентиры. Кроме того, в оси 6 жестко закреплен датчик угловых положений в виде фотоэлектрического автоколлиматора, содержащего объектив 10, в фокальной плоскости которого расположены точечный источник света 3, фотоприемник 4 и призма 5 с полупрозрачным зеркалом. При этом оси симметрии датчика (оптическая ось) примерно совпадает с горизонтальной осью поворота, Гиротеодолит также включает в себя гироблок, корпус 11 которого с подвешенным внутри на торсионе 12 чувствительным элементом 13 и с зеркалом 14 закреплен в боковой колонке алидады таким образом, что фотоэлектрический датчик угловых положений оптически связан с зеркалом 14, и при этом вертикальная ось симметрии гироблока и горизонтальная ось поворота трубы находятся в одной вертикальной плоскости. В состав гироблока с целью управления движением чувствительного элемента включено моментное устройство, ротор 15 и статор 16 которого закреплены соответственно на чувствительном элементе и корпусе гироблока Для измерения угловых положений зрительной трубы используется вертикальный 17 и горизонтальный 18 лимбы, связанные соответственно с осями 6 и 1. На фиг. 2 изображен горизонтальный разрез А-А гиротеодолита,.на котором показан угол Da 1 , характеризующий непараллельность оптической оси фотоэлектрического датчика и горизонтальной оси поворота, а также показан угол Da 2, характеризующий неперпендикулярность оптической оси зрительной трубы и горизонтальной оси поворота. Всилу ограниченных возможностей технологии изготовления прибора значения углов Da 1 и Da 2 могут быть существенными, порядка десятков угловы х секунд. Кроме того эти углы могут существенно изменяться из-за старения конструкции, из-за нестабильности положения отдельных элементов при изменении температуры среды и т.д.. что затрудняет их учет в качестве систематических погрешностей при определении азимута. На фиг. 3 показан тот же разрез гиротеодолита после поворота зрительной трубы вместе с фотоэлектрическим датчиком вокруг горизонтальной оси на пол-оборота. При этом знаки углов Da 1 и Da 2 изменились на противоположные в сравнении с фиг. 2. На фиг. 4 показан вариант конструктивного исполнения гиротеодолита, в котором в качестве датчика угловых положений вместо фотоэлектрического автоколлиматора используется визуальный автоколлиматор, снабженный окуляром 21 и измерительной , сеткой 19 в фокальной плоскости объектива 22, с помощью которой можно наблюдать свободное прецессионное движение чувствительного элемента без использования в конструкции моментного устройства. Эксплуатация такого прибора усложняется в связи с необходимостью визуальных наблюдений за чувствительным элементом, однако конструкция при этом упрощается, что может представить интерес при решении конкретных задач. Работа гиротеодолита, представленного на фиг. 1, 2, 3. производится следующим образом. Вначале производится согласование зрительной трубы с ориентирным направлением одним приемом (при двух кругах с переворотом зрительной трубы через зенит вокруг горизонтальной оси). При этом по горизонтальному лимбу 18 фиксируются соответствующие отсчеты a 1 и a 2. После этого труба устанавливается в горизонт по известному отсчету вертикального лимба 17, и по данным карты или магнитной буссоли производится разворот алидады вокруг вертикальной оси в положение, при котором горизонтальная ось поворота трубы вместе с оптической осью датчика оказываются грубо ориентированными на географический Север, обычно с точностью до нескольких угловы х градусов. В этом положении на фиг. 2 после разгона гиромотора производится удержание зеркала 14 чувствительного элемента в согласованном положении с датчиком 10 с помощью моментного устройства 15 и 16 по командам датчика 10. При этом величина удерживающего момента несет информацию об отклонении Аді оптической оси датчика и согласованного с ним чувстви тельного элемента от положения динамического равновесия последнего, которое, как известно, совпадает с географическим меридианом. Таким образом величина АД1 есть азимут оптической оси датчика. Затем зрительная трубы переводится через зенит на пол-оборота вокруг горизонтальной оси поворота, как это показано на фиг. 3, и в этом положении производится новое определение азимута оптической оси датчика Ад2 . Учитывая то, что алидада при обоих измерениях оставалась неподвижной, среднее значение результатов есть азимут горизонтальной оси поворота трубы. В этом положении фиксируется отсчет a го по горизонтальному лимбу 15. Значение азимута ориентирного направления, если принять допущение, что зеркало 14 перпендикулярно оси вращения гиромотора, определяется по формуле Аорн=Аг о+ a орн- a го-dп, где Аг о=0,5(Ад1 +Ад2)- азимут горизонтальной оси поворота; Ад1 и Ад2 результаты определения азимутов оптической оси датчика при двух положениях зрительной трубы в горизонте, обращенных на пол-оборота относительно горизонтальной оси поворота; a гоотсчет по горизонтальному лимбу при определениях азимута; - отсчеты по горизонтальному лимбу, соответствующие двум полуприемам визирования трубы на ориентирное направление; dп=90°00'00" -постоянная поправка прибора. Таким образом предложенное техническое решение позволяет исключить влияние нестабильности взаимного положения их оптических осей, и тем самым позволяет свести значение поправки к величине, всегда строго равной 90ο00Ό0" и не зависящей от старения конструкции и условий эксплуатации. Рассмотрим численный пример, принимая значения составляющих: ; . Подставляя принятые значения в приведенные выше формулы, получим Отметим, что непараллельность оптической оси датчика относительно горизонтальной оси поворота, а также неперпендикулярность оптической оси трубы относительно той же оси поворота в данном случае соответственно составляют; Работа варианта гиротеодолита, представленного на фиг. 4, производится аналогично, с тем отличием, что значение азимутов оптической оси датчика определяется, например, по реверсиям чувствительного элемента, наблюдаемым по, измерительной сетке автоколлиматора. При этом измеряется угол между нулем сетки и средним положением реверсий, характеризующим положение географического меридиана. Для исключения углового несовпадения нуля автоколлиматора и горизонтальной оси поворота трубы, измерений азимута повторяют после поворота трубы вокруг горизонтальной оси на пол-оборота
ДивитисяДодаткова інформація
Автори англійськоюHolik Marat Mykolaiovych
Автори російськоюГолик Марат Николаевич
МПК / Мітки
МПК: G01C 19/00
Мітки: гіротеодоліт
Код посилання
<a href="https://ua.patents.su/5-14539-giroteodolit.html" target="_blank" rel="follow" title="База патентів України">Гіротеодоліт</a>
Нафтозбиральне судно
Номер патенту: 2186
Опубліковано: 26.12.1994
Автор: Савицький Всеволод Олександрович
МПК: B63B 35/32
Мітки: нафтозбиральне, судно
Формула / Реферат:
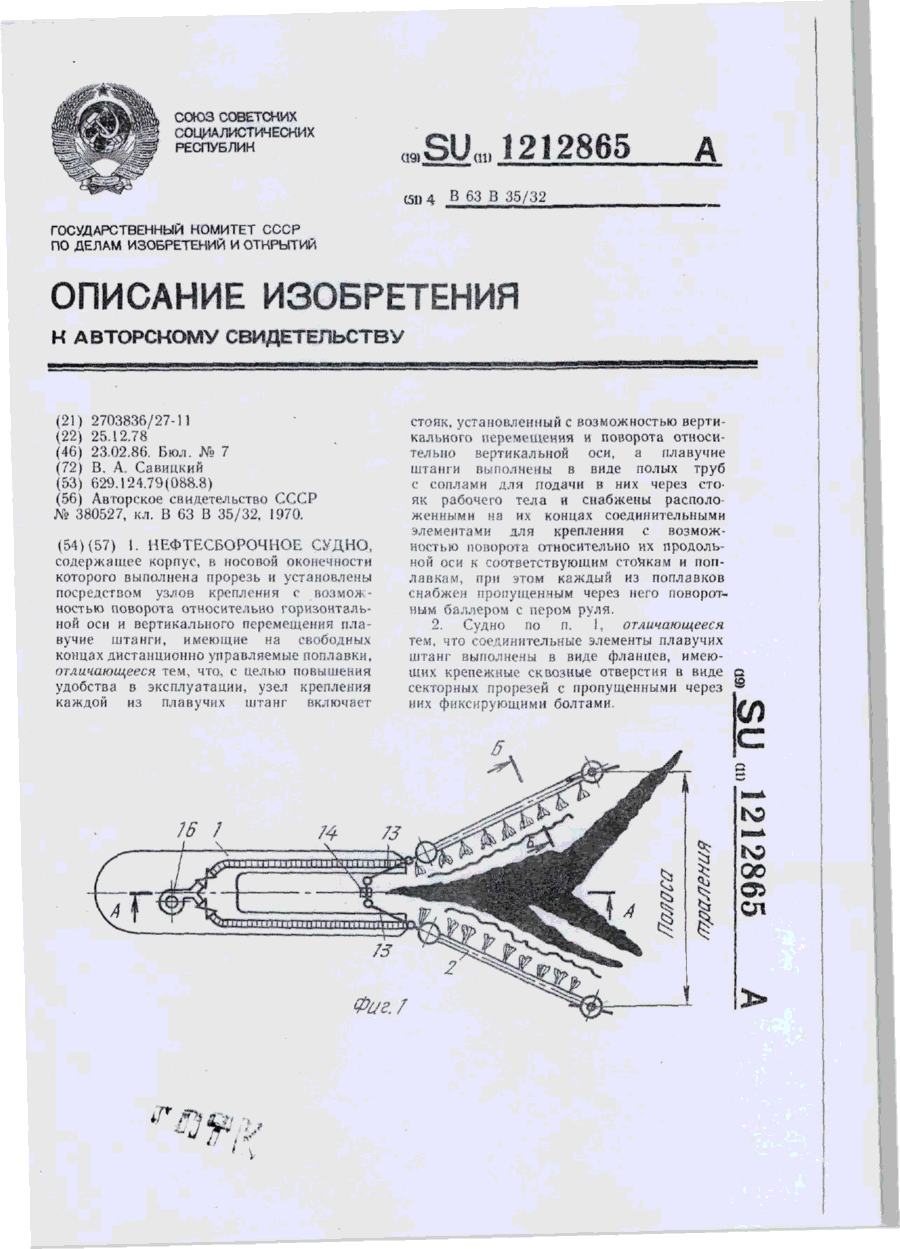
1. Нефтесборочное судно, содержащее корпус, в носовой оконечности которого выполнена прорезь и установлены посредством узлов крепления с возможностью поворота относительно горизонтальной оси и вертикального перемещения плавучие штанги, имеющие на свободных концах дистанционно управляемые поплавки, отличающееся тем, что, с целью повышения удобства в эксплуатации, узел крепления каждой из плавучих штанг включает стояк, установленный с...
Ручний труборіз максимова є.м.
Номер патенту: 11215
Опубліковано: 25.12.1996
Автор: Максимов Євген Миколайович
МПК: B23D 21/00
Мітки: ручний, є.м, максимова, труборіз
Формула / Реферат:
(57) Ручной труборез, содержащий станину с опорными роликами под трубу, установленную на ней стойку с отверстиями, оси которых расположены в горизонтальной плоскости, опору с режущим инструментом, смонтированную на стойке с возможностью регулируемого положения, отличающийс я тем, что он снабжен двумя винтами, расположенными симметрично относительно стойки по краям станины с возможностью поворота и фиксации одного из них вдоль нее,...
Перетворювач змінної напруги в постійну
Номер патенту: 1469
Опубліковано: 25.07.1994
Автори: Бізянов Євген Євгенійович, Єрьомін Валерій Генадійович, Кудекін Володимир Степанович
МПК: H02M 7/02
Мітки: змінної, перетворювач, напруги, постійну
Формула / Реферат:
Преобразователь переменного напряжения в постоянное, содержащий силовой вентиль, катодом подключенный к одному из выходных зажимов, ограничитель амплитуды, состоящий из чувствительного элемента и управляемого им ключевого элемента, включенного параллельно выходу выпрямителя, отличающийся тем, что в него дополнительно введен реактивный элемент, один вывод которого подключен к первому входному зажиму, при этом второй вывод реактивного...
Прес-форма для виготовлення суцільних шин
Номер патенту: 2193
Опубліковано: 26.12.1994
Автори: Науменко Олександр Петрович, Дзюра Євген Антонович
МПК: B29D 30/00, B29C 35/02
Мітки: прес-форма, шин, суцільних, виготовлення
Формула / Реферат:
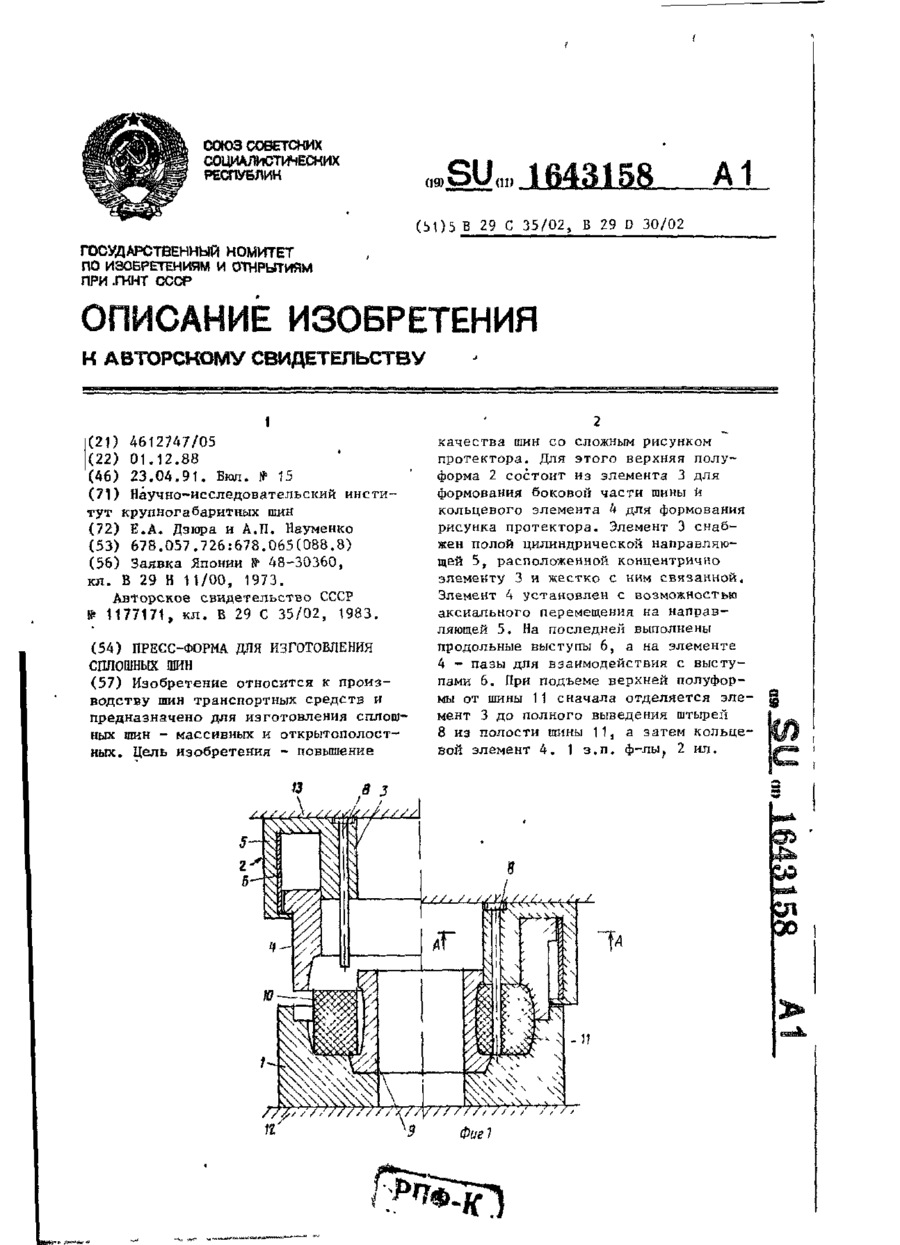
1. Пресс-форма для изготовления сплошных шин, содержащая неподвижную нижнюю и подвижную верхнюю полуформы, отличающаяся тем, что, с целью повышения качества шин со сложным рисунком, верхняя полуформа выполнена состоящей из элемента для формования боковой части шины, снабженного концентричной ему и жестко с ним связанной полой цилиндрической направляющей и установленного на цилиндрической направляющей с возможностью аксиального перемещения...
Кодовий замок

Номер патенту: 4175
Опубліковано: 27.12.1994
Автори: Соболев Леонід Миколайович, Рудченко Володимир Миколайович, Клоков Станіслав Миколайович
МПК: E05B 37/00
Формула / Реферат:
Кодовый замок, содержащий корпус, установленные в корпус, на общей оси блокирующие втулки с лысками на наружной поверхности и связанные с ними торцовыми зубьями кодовые кольца, подпружиненный засов, установленный с возможностью поворота в плоскости, перпендикулярной оси кодовых колец, и взаимодействия с наружной поверхностью блокирующих втулок, и замочный элемент с выступами для взаимодействия с засовом, отличающийся тем, что корпус и...
Попередній патент: Композиція для виробництва комбінованого харчового продукту
Наступний патент: Спосіб діагностики нозологічної належності синдрому високої легеневої гіпертензії
Випадковий патент: Пристрій для фітопаротерапії з інтелектуальною системою управління процедурою