Спосіб визначення крутного моменту електродвигунів
Номер патенту: 74407
Опубліковано: 25.10.2012



Формула / Реферат
Спосіб визначення крутного моменту електродвигунів, який полягає у зчитуванні та обробці вихідних імпульсів, отриманих з імпульсного датчика кутового положення, який відрізняється тим, що виконують зчитування імпульсів з імпульсного датчика кутового положення при відомих технічних характеристиках датчика - його дискретності та частоті опитування імпульсного датчика кутового положення, обробка вихідних імпульсів шляхом визначення тривалості кожного вихідного імпульсу за часом за допомогою значень рівня вихідних сигналів імпульсного датчика кутового положення та визначення миттєвого поточного моменту як ділення різниці поточних значень швидкості на добуток поточних значень різниці величин періоду та моменту інерції ротора двигуна, яка є паспортною величиною і визначається заводом-виробником.
Текст
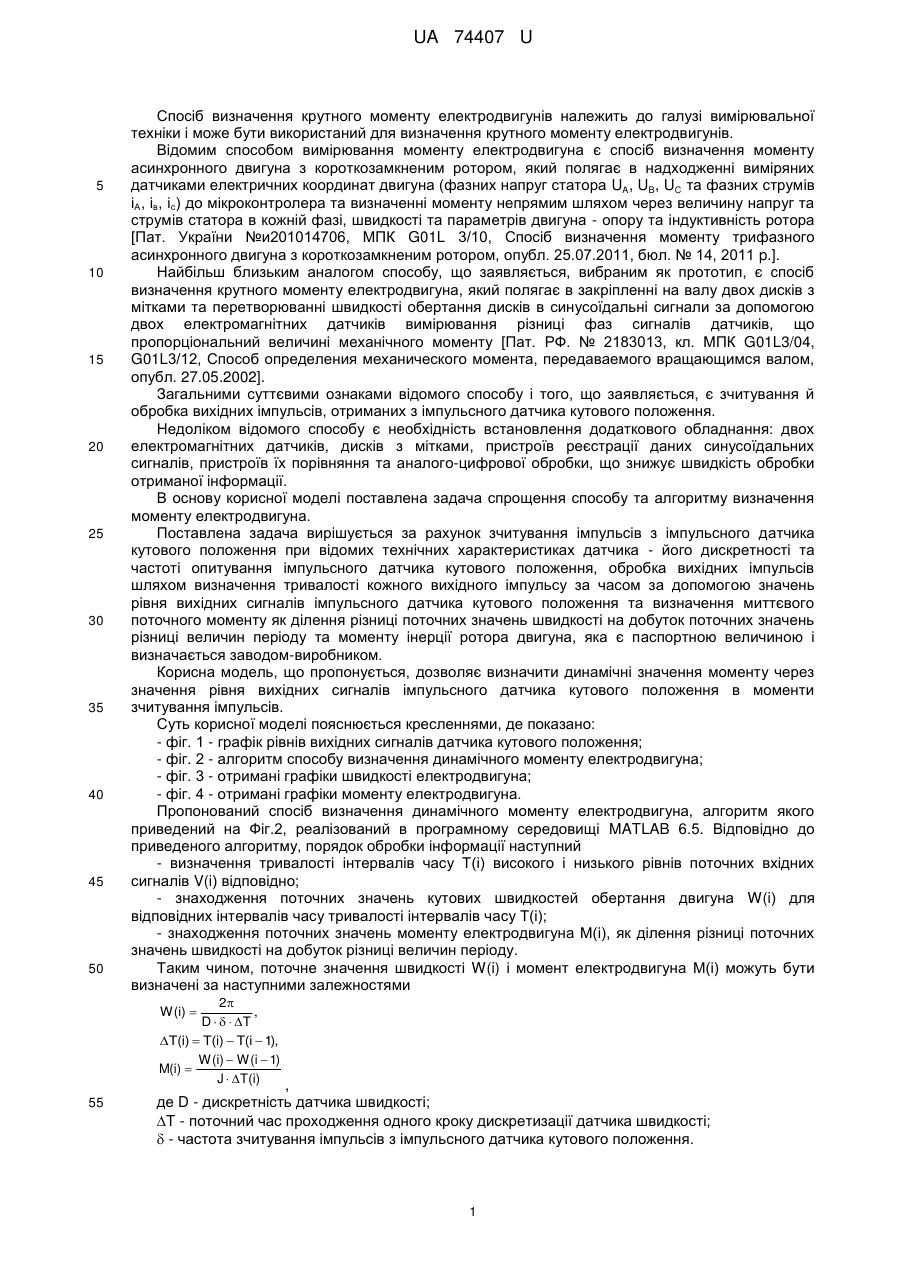
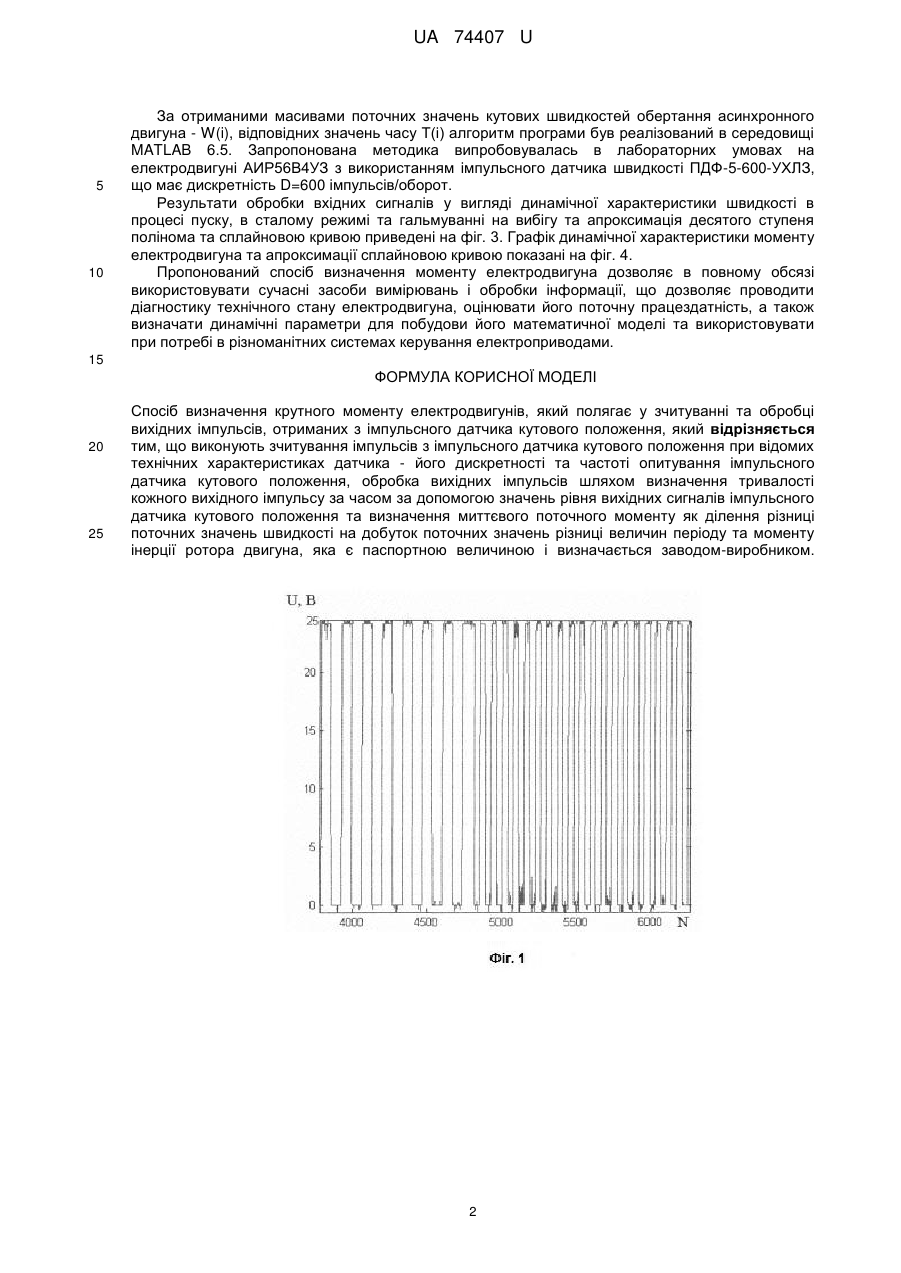
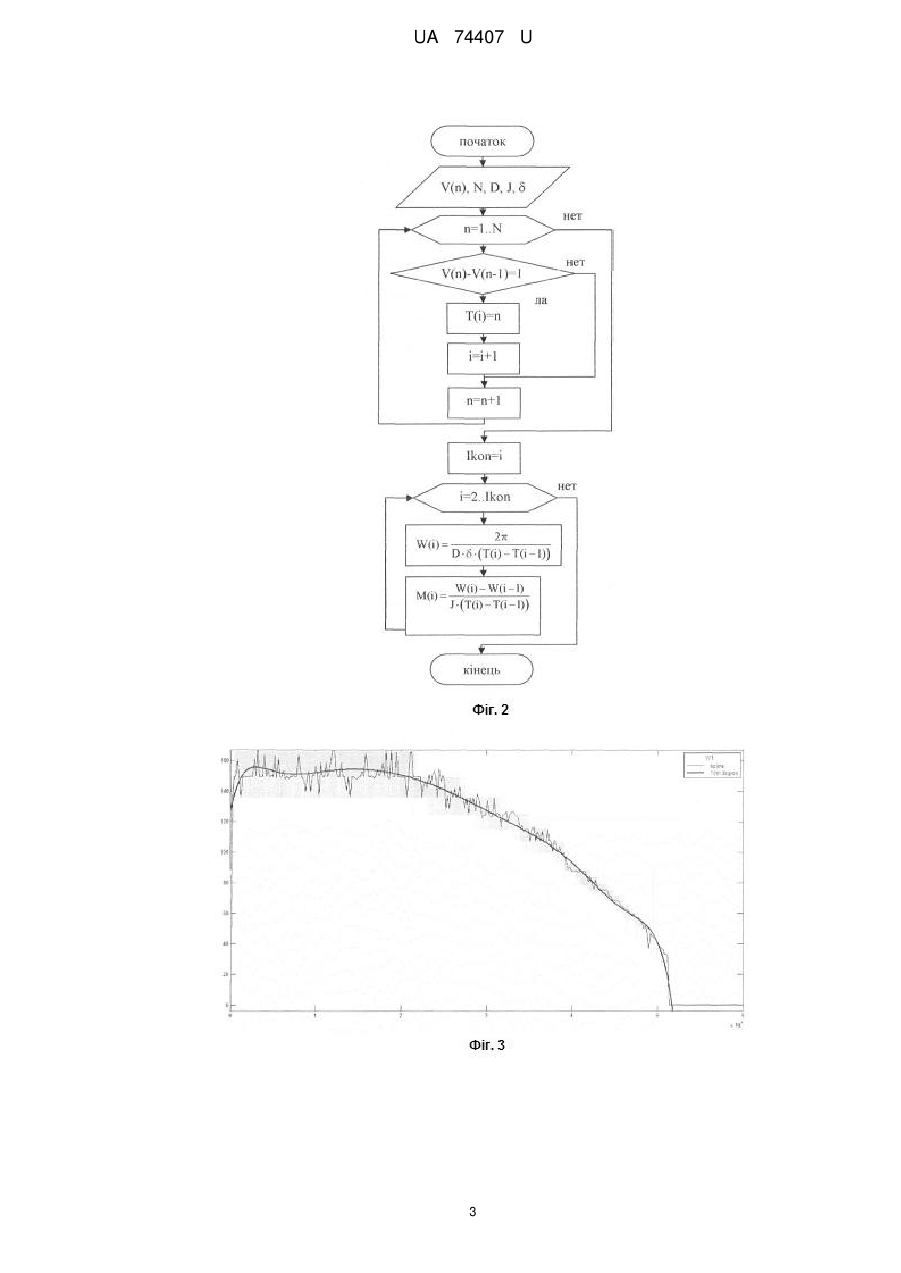
Реферат: UA 74407 U UA 74407 U 5 10 15 20 25 30 35 40 45 50 Спосіб визначення крутного моменту електродвигунів належить до галузі вимірювальної техніки і може бути використаний для визначення крутного моменту електродвигунів. Відомим способом вимірювання моменту електродвигуна є спосіб визначення моменту асинхронного двигуна з короткозамкненим ротором, який полягає в надходженні виміряних датчиками електричних координат двигуна (фазних напруг статора UA, UB, UC та фазних струмів іА, ів, іс) до мікроконтролера та визначенні моменту непрямим шляхом через величину напруг та струмів статора в кожній фазі, швидкості та параметрів двигуна - опору та індуктивність ротора [Пат. України №и201014706, МПК G01L 3/10, Спосіб визначення моменту трифазного асинхронного двигуна з короткозамкненим ротором, опубл. 25.07.2011, бюл. № 14, 2011 p.]. Найбільш близьким аналогом способу, що заявляється, вибраним як прототип, є спосіб визначення крутного моменту електродвигуна, який полягає в закріпленні на валу двох дисків з мітками та перетворюванні швидкості обертання дисків в синусоїдальні сигнали за допомогою двох електромагнітних датчиків вимірювання різниці фаз сигналів датчиків, що пропорціональний величині механічного моменту [Пат. РФ. № 2183013, кл. МПК G01L3/04, G01L3/12, Способ определения механического момента, передаваемого вращающимся валом, опубл. 27.05.2002]. Загальними суттєвими ознаками відомого способу і того, що заявляється, є зчитування й обробка вихідних імпульсів, отриманих з імпульсного датчика кутового положення. Недоліком відомого способу є необхідність встановлення додаткового обладнання: двох електромагнітних датчиків, дисків з мітками, пристроїв реєстрації даних синусоїдальних сигналів, пристроїв їх порівняння та аналого-цифрової обробки, що знижує швидкість обробки отриманої інформації. В основу корисної моделі поставлена задача спрощення способу та алгоритму визначення моменту електродвигуна. Поставлена задача вирішується за рахунок зчитування імпульсів з імпульсного датчика кутового положення при відомих технічних характеристиках датчика - його дискретності та частоті опитування імпульсного датчика кутового положення, обробка вихідних імпульсів шляхом визначення тривалості кожного вихідного імпульсу за часом за допомогою значень рівня вихідних сигналів імпульсного датчика кутового положення та визначення миттєвого поточного моменту як ділення різниці поточних значень швидкості на добуток поточних значень різниці величин періоду та моменту інерції ротора двигуна, яка є паспортною величиною і визначається заводом-виробником. Корисна модель, що пропонується, дозволяє визначити динамічні значення моменту через значення рівня вихідних сигналів імпульсного датчика кутового положення в моменти зчитування імпульсів. Суть корисної моделі пояснюється кресленнями, де показано: - фіг. 1 - графік рівнів вихідних сигналів датчика кутового положення; - фіг. 2 - алгоритм способу визначення динамічного моменту електродвигуна; - фіг. 3 - отримані графіки швидкості електродвигуна; - фіг. 4 - отримані графіки моменту електродвигуна. Пропонований спосіб визначення динамічного моменту електродвигуна, алгоритм якого приведений на Фіг.2, реалізований в програмному середовищі MATLAB 6.5. Відповідно до приведеного алгоритму, порядок обробки інформації наступний - визначення тривалості інтервалів часу Т(і) високого і низького рівнів поточних вхідних сигналів V(i) відповідно; - знаходження поточних значень кутових швидкостей обертання двигуна W(i) для відповідних інтервалів часу тривалості інтервалів часу Т(і); - знаходження поточних значень моменту електродвигуна М(і), як ділення різниці поточних значень швидкості на добуток різниці величин періоду. Таким чином, поточне значення швидкості W(i) і момент електродвигуна М(і) можуть бути визначені за наступними залежностями 2 , D T T(i) T(i) T(i 1), W (i) W (i 1) M(i) J T(i) , W (i) 55 де D - дискретність датчика швидкості; T - поточний час проходження одного кроку дискретизації датчика швидкості; - частота зчитування імпульсів з імпульсного датчика кутового положення. 1 UA 74407 U 5 10 За отриманими масивами поточних значень кутових швидкостей обертання асинхронного двигуна - W(i), відповідних значень часу Т(і) алгоритм програми був реалізований в середовищі MATLAB 6.5. Запропонована методика випробовувалась в лабораторних умовах на електродвигуні АИР56В4УЗ з використанням імпульсного датчика швидкості ПДФ-5-600-УХЛЗ, що має дискретність D=600 імпульсів/оборот. Результати обробки вхідних сигналів у вигляді динамічної характеристики швидкості в процесі пуску, в сталому режимі та гальмуванні на вибігу та апроксимація десятого ступеня полінома та сплайновою кривою приведені на фіг. 3. Графік динамічної характеристики моменту електродвигуна та апроксимації сплайновою кривою показані на фіг. 4. Пропонований спосіб визначення моменту електродвигуна дозволяє в повному обсязі використовувати сучасні засоби вимірювань і обробки інформації, що дозволяє проводити діагностику технічного стану електродвигуна, оцінювати його поточну працездатність, а також визначати динамічні параметри для побудови його математичної моделі та використовувати при потребі в різноманітних системах керування електроприводами. 15 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 20 25 Спосіб визначення крутного моменту електродвигунів, який полягає у зчитуванні та обробці вихідних імпульсів, отриманих з імпульсного датчика кутового положення, який відрізняється тим, що виконують зчитування імпульсів з імпульсного датчика кутового положення при відомих технічних характеристиках датчика - його дискретності та частоті опитування імпульсного датчика кутового положення, обробка вихідних імпульсів шляхом визначення тривалості кожного вихідного імпульсу за часом за допомогою значень рівня вихідних сигналів імпульсного датчика кутового положення та визначення миттєвого поточного моменту як ділення різниці поточних значень швидкості на добуток поточних значень різниці величин періоду та моменту інерції ротора двигуна, яка є паспортною величиною і визначається заводом-виробником. 2 UA 74407 U 3 UA 74407 U Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of rotational moment of electric motors
Автори англійськоюKvashnin Valerii Olehovych, Cherednyk Yulia Mykolaivna
Назва патенту російськоюСпособ определения крутящего момента электродвигателей
Автори російськоюКвашнин Валерий Олегович, Чередник Юлия Николаевна
МПК / Мітки
МПК: G01L 3/00
Мітки: електродвигунів, моменту, спосіб, крутного, визначення
Код посилання
<a href="https://ua.patents.su/6-74407-sposib-viznachennya-krutnogo-momentu-elektrodviguniv.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення крутного моменту електродвигунів</a>
Спосіб визначення крутного моменту двигуна внутрішнього згоряння
Номер патенту: 85252
Опубліковано: 12.01.2009
Автори: Грабар Іван Григорович, Ломакін Володимир Олександрович, Ільченко Андрій Володимирович
МПК: G01L 3/00
Мітки: згоряння, спосіб, внутрішнього, двигуна, визначення, крутного, моменту
Формула / Реферат:
Спосіб визначення крутного моменту двигуна внутрішнього згоряння (ДВЗ), згідно з яким вимірюють миттєві значення кутового прискорення колінчастого вала шляхом подвійного числового диференціювання його кута повороту за часом, який відрізняється тим, що попередньо для всіх кутів повороту колінчастого вала з заданим кроком за період його обертання для ДВЗ заданої марки, вибраного за еталон, визначають і запам'ятовують відповідні їм миттєві...
Спосіб визначення ефективного крутного моменту та ефективної потужності двигуна автомобіля
Номер патенту: 69235
Опубліковано: 25.04.2012
Автори: Подригало Михаил Абович, Абдулгазіс Умер Абдулайович, Плетньов Вячеслав Миколайович, Подригало Надія Михайлівна, Полянський Олександр Сергейович, Абдулгазіс Азіз Умерович
МПК: G01M 17/00, G01L 3/24
Мітки: потужності, ефективно, спосіб, двигуна, моменту, ефективного, крутного, визначення, автомобіля
Формула / Реферат:
1. Спосіб визначення ефективного крутного моменту й ефективної потужності двигуна автомобіля полягає в тому, що в умовах експлуатації, при мінімальній частоті холостого ходу двигуна, миттєво збільшують подачу палива до максимального значення і, по досягненні номінальної частоти обертання колінчатого вала, вимірюють прискорення колінчатого вала, який відрізняється тим, що прискорення колінчатого вала визначають шляхом виміру кутової швидкості...
Спосіб виміру крутного моменту
Номер патенту: 23358
Опубліковано: 25.05.2007
Автор: Мякотін Дмитро Олександрович
Мітки: виміру, спосіб, крутного, моменту
Формула / Реферат:
Спосіб виміру крутного моменту, що полягає у вимірі, за заданим законом моменту щодо створювання зсуву інформаційних імпульсів вимірювачем крутного моменту з використанням деформації пружного елемента, та подальшій обробці імпульсів, який відрізняється тим, що зсув фази інформаційних імпульсів під час обертання вала привідного двигуна і виконавчого механізму реєструють безконтактно імпульсними датчиками за допомогою вимірювальних дисків і...
Пристрій для виміру крутного моменту
Номер патенту: 26169
Опубліковано: 10.09.2007
Автор: Мякотін Дмитро Олександрович
МПК: G01L 3/10
Мітки: пристрій, крутного, виміру, моменту
Формула / Реферат:
Пристрій для виміру крутного моменту двигуна і виконавчого механізму, що зв'язані між собою з можливістю радіального зсуву на величину, пропорційну зростаючому навантаженню на торсійному валу, на якому закріплені зубчасті чутливі елементи, який відрізняється тим, що зубчасті чутливі елементи виконані у вигляді дисків, які нерухомо встановлені напроти один одного біля двигуна та виконавчого механізму на протилежних кінцях торсійного вала, який...
Спосіб визначення кутової швидкості шпинделя металорізального верстата
Номер патенту: 38001
Опубліковано: 25.12.2008
Автори: Гузенко Віталій Семенович, Квашніна Яна Валеріївна, Квашнін Валерій Олегович, Полупан Іван Іванович
МПК: G01P 3/42
Мітки: шпинделя, спосіб, верстата, кутової, металорізального, визначення, швидкості
Формула / Реферат:
Спосіб визначення кутової швидкості шпинделя металорізального верстата, який включає зчитування і обробку вихідних імпульсів, отриманих з імпульсного датчика кутового положення, при відомих технічних характеристиках датчика - його дискретності та сквапності його сканування - частоті, на якій здійснюють опитування імпульсного датчика кутового положення, який відрізняється тим, що обробку вихідних імпульсів виконують шляхом використання значень...
Попередній патент: Спосіб кування валів
Наступний патент: Пристрій для очищення газів
Випадковий патент: Контактний вимірювач площі