Пристрій для здійснення пасивних рухів у лабораторних тварин

Формула / Реферат
Пристрій для здійснення пасивних рухів у лабораторних тварин, що складається з послідовно з'єднаних блоків переміщення кінцівок, блока керування роботою двигунів, блока зміни напрямку, швидкості та черговості залучення кінцівок, який відрізняється тим, що використано систему блоків та шківів на шарикопідшипниках з тросово-демпферною системою перетворення обертального моменту на послідовно-зворотні рухи кінцівок, а також тим, що для здійснення пасивних рухів використано два прецизійні крокові двигуни з додатковим блоком керування їх роботою.
Текст
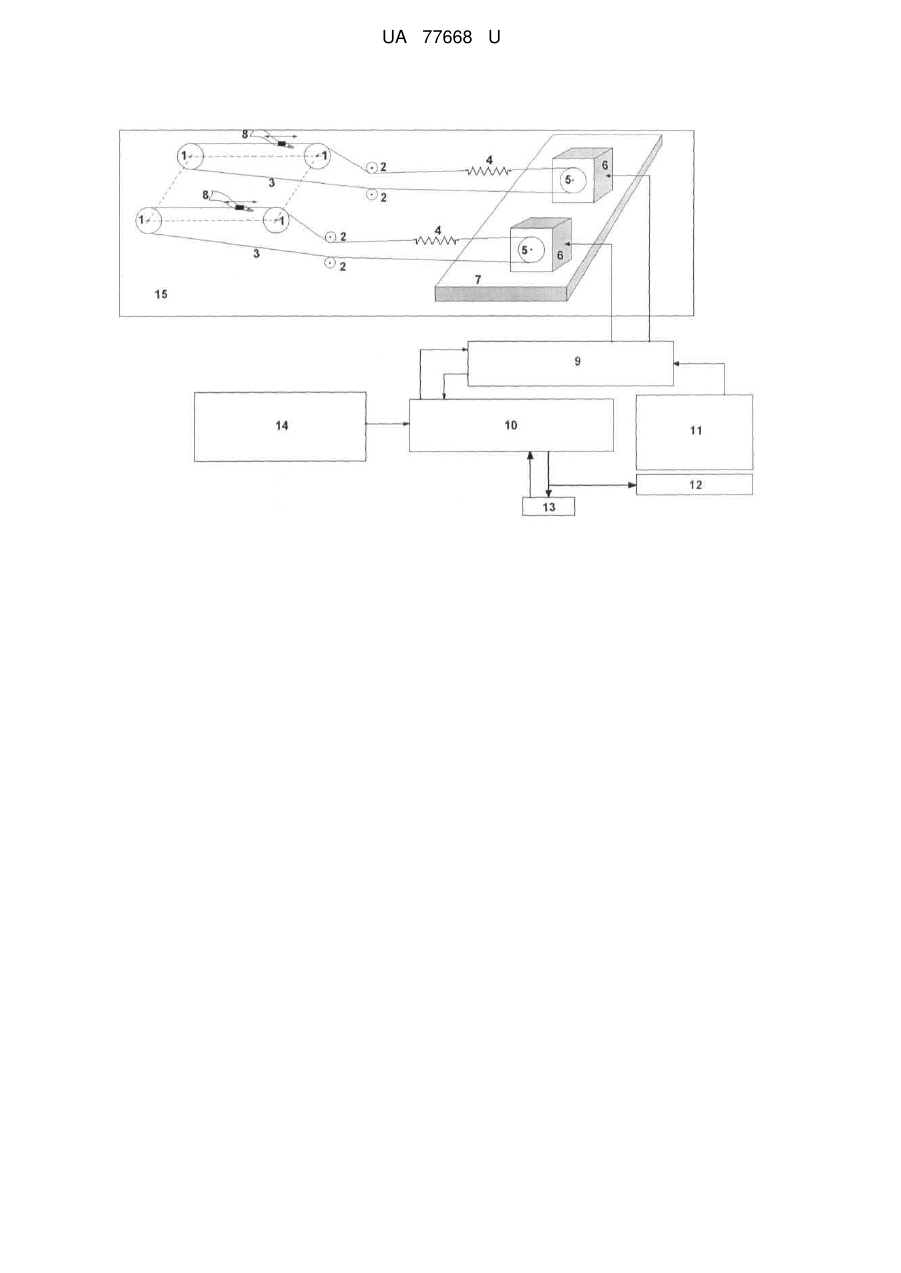
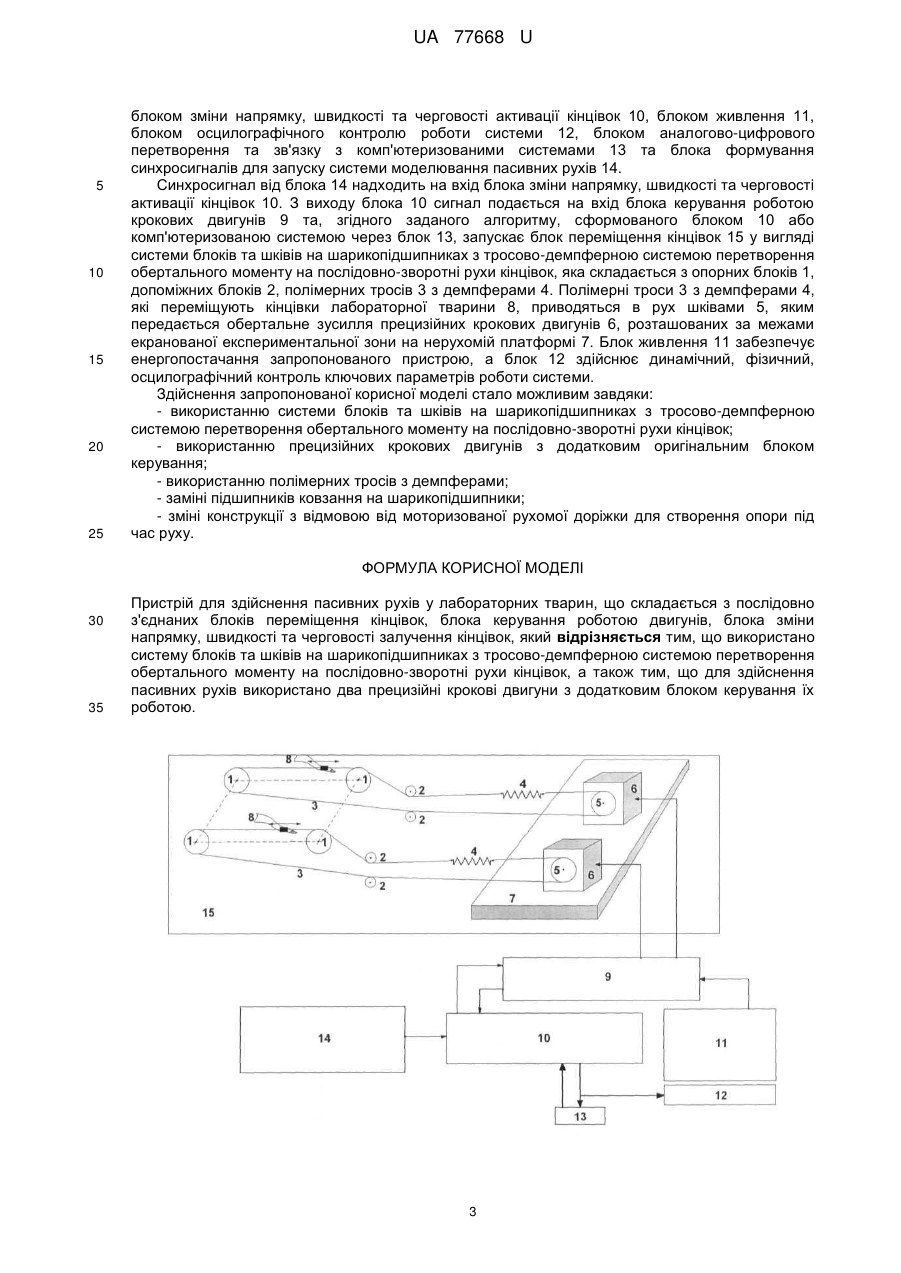
Реферат: Пристрій для здійснення пасивних рухів у лабораторних тварин складається з послідовно з'єднаних блоків переміщення кінцівок, блока керування роботою двигунів, блока зміни напрямку, швидкості та черговості залучення кінцівок. Використано систему блоків та шківів на шарикопідшипниках з тросово-демпферною системою перетворення обертального моменту на послідовно-зворотні рухи кінцівок, а також тим, що для здійснення пасивних рухів використано два прецизійні крокові двигуни з додатковим блоком керування їх роботою. UA 77668 U (12) UA 77668 U UA 77668 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до біомедичної техніки й може бути використана у фізіології для дослідження параметрів рухів у лабораторних тварин, біохімічних і електрофізіологічних змін у мозкових структурах, причетних до організації рухів, а також для вивчення процесів реабілітації після порушення рухової функції. Відомий пристрій для механічного переміщення кінцівок у людини з використанням тактильної стимуляції (Variable structure pantograph mechanism with spring suspension system for comprehensive upper-limb haptic movement training / J.C. Perry, J. Oblak, J.H. Jung, I. Cikajlo, J.F. Veneman, N. Goljar, N. Bizoviear, Z. Matjaeie, T. Keller // Journal of Rehabilitation Research & Development.-2011. - V. 48, N. 4. - P. 317-334), який дозволяє здійснювати пасивні рухи в людини шляхом використання електромеханічної системи, що має стаціонарне базування. Пристрій з'єднується з верхніми кінцівками людини за допомогою рухомо поєднаних металевих важелів та тросової системи підведення рушійної сили від електродвигунів постійного струму, керованих системою адаптивної зміни потужності залежно від допоміжного та протидіючого зусилля. Основними недоліками описаного пристрою є: відсутність можливості точної оцінки параметрів виконуваних пасивних рухів, неможливість дотримання стабільних часових параметрів балістичних компонентів виконуваних рухів, неможливість моделювання балістичних компонентів їжодобувних рухів, відсутність можливості чіткого позиціонування положення кінцівки внаслідок використання звичайних двигунів постійного струму з редукторним перетворенням обертального моменту, що також спричиняє значні втрати часу на зміну напрямку виконуваних рухів. До недоліків подібної конструкції також слід віднести складність відтворення прямих траєкторій модельованих рухів з наданням лінійних прискорень, оскільки даний пристрій переважно орієнтований на створення обертальних рухів з кутовим прискоренням. Подібне конструктивне рішення не дозволяє повноцінно задіяти пропріоцептивну ланку сервосистем керування скелетними м'язами, зокрема забезпечити оцінку діючого прискорення в момент початку, зміни напрямку та завершення руху. Масивність та значна металомісткість конструкції зумовлює її високу інерційність, унеможливлює швидке та ефективне електромагнітне екранування установки з метою вивчення електричних проявів роботи мозкових структур під час здійснення пасивних рухів. Також під час здійснення пасивних рухів об'єкт дослідження має знаходитись у сидячому положенні, що, у свою чергу, накладає обмеження на застосування пристрою з експериментальною метою. Слід зазначити, що наявність свідомих м'язових скорочень та мікровібрацій пристрою в процесі здійснення пасивних рухів може призвести до появи артефактів під час нейрофізіологічних вимірювань. За прототип взято відомий автоматизований пристрій для здійснення пасивних рухів (A Robotic Device for Studying Rodent Locomotion After Spinal Cord Injury/ J.A. Nessler, W. Timoszyk, M. Merlo, J.L. Emken, K. Minakata, R.R. Roy, R.D. Leon, V.R. Edgerton, D.J. Reinkensmeyer // IEEE TRANSACTIONS ON NEURAL SYSTEMS AND REHABILITATION ENGINEERING.-2005. - V. 4, N. 13. - P. 497-506), що являє собою електромеханічну систему переміщення кінцівок лабораторної тварини з двома ступенями свободи на основі перетворення обертального моменту електродвигунів на поступально-зворотні пасивні рухи кінцівок щура. Через систему противаг здійснюється фіксація (підвішування) тіла лабораторної тварини над рухомою поверхнею та його балансування з двохсторонньою системою важелів, які здійснюють пасивні рухи шляхом переміщення нижніх кінцівок тварини. Фіксація кінцівок до важелів системи здійснюється з використанням неопренових манжетів. Формування опори для кінцівок та їх тактильна стимуляція забезпечується використанням моторизованої рухомої поверхні у вигляді доріжки. Контроль за рухами кінцівок здійснюється фотооптичними перетворювачами, які оцінюють стан мультиважільної системи прототипу в ключових точках переміщення та стан безщіткових двигунів. Роботу прототипу координує комп'ютеризована система для балансування тіла тварини та перерозподілу центру ваги з метою відтворення пасивних рухів, максимально наближених за характеристиками до натуральних, та оцінки їх параметрів. У блоці переміщення кінцівок для приведення в дію мультиважільної системи та здійснення пасивних рухів кожною кінцівкою використано по два звичайних безщіткових двигуни, що вимагає створення системи противаг та балансування піддослідної тварини. Подібне конструктивне рішення потребує рухомої поверхні з метою створення опори для кінцівок. Даний пристрій автоматизує виконання пасивних рухів, дає можливість здійснювати локомоторне тренування та може бути використаний з реабілітаційною метою. Основними недоліками описаного пристрою є: - використання двох звичайних безщіткових двигунів для приведення в дію лише однієї кінцівки; - неможливість здійснювати пасивні рухи, максимально наближені за параметрами до природних, однією кінцівкою лабораторної тварини внаслідок розбалансування системи; 1 UA 77668 U 5 10 15 20 25 30 35 40 45 50 55 60 - створення вимушеного, не природнього, вертикального положення лабораторної тварини, що може впливати на правильність трактування результатів дослідження; - потреба в наявності додаткової моторизованої рухомої поверхні з метою створення опори для кінцівок, що ускладнює конструкцію системи; - відносно висока інерційність рухомих компонентів системи; - конструктивна неможливість фіксації тулуба лабораторної тварини, що викликає його постійне зміщення; - використання семи точок з'єднання важелів з підшипниками ковзання рухомих елементів пристрою, що, у свою чергу, викликає появу осьових перекосів та додаткового тертя, стаючи на заваді максимально швидкій зміні напрямку руху з підтриманням стаціонарних часових параметрів; - досить високий рівень механічних завад внаслідок жорсткості конструкції; - низька мобільність технологічного ланцюга; - внесення електромагнітних завад в зону локалізації лабораторної тварини; - значне енергоспоживання, габарити та маса пристрою; В основу запропонованої корисної моделі поставлена задача створити пристрій для здійснення пасивних рухів у лабораторних тварин з покращеними технічними характеристиками: спрощеною кінематичною схемою приведення в рух кінцівок лабораторної тварини в будь-якій комбінації, відсутністю потреби у використанні рухомої моторизованої доріжки в якості опори для кінцівок, відсутністю потреби у використанні системи противаг, підвішування та балансування об'єкту дослідження, забезпеченням максимального наближення параметрів пасивних рухів до натуральних з балістичними компонентами, мінімальним рівнем електромагнітних та механічних завад, адаптацією системи до електрофізіологічних досліджень головного мозку. Поставлена задача вирішується тим, що мультиважільну семивісну систему здійснення пасивних рухів однією кінцівкою замінено на систему блоків та шківів на шарикоподшипниках з тросово-демпферною системою перетворення обертального моменту на поступально-зворотні рухи кінцівок, заміною двох звичайних безщіткових двигунів постійного струму для приведення в дію лише однієї кінцівки на прецизійні крокові двигуни з додатковим блоком їх керування, винесенням електродвигунів та блока керування за межі електромагнітно-екранованої експериментальної зони локалізації лабораторної тварини, конструктивною відмовою від моторизованої рухомої доріжки для створення опори. Використання лише двох крокових двигунів замість чотирьох або восьми безщіткових прототипу та відмова від рухомої моторизованої доріжки дозволили суттєво знизити енергоспоживання пристрою та його конструктивне виконання. Використаний підхід також дозволяє суттєво збільшити простір навколо лабораторної тварини, надає можливість активувати будь-яку кінцівку лабораторного щура. Використані нами методи дозволили отримати конструктивно простий компактний пристрій. Заміна звичайних безщіткових двигунів прецизійними кроковими забезпечила створення достатніх лінійних прискорень з великою точністю відтворення при здійсненні пасивних рухів та можливість оперативної зміни їх напрямків, що забезпечує максимальне наближення характеристик рухів до натуральних. У запропонованому пристрої мультиважільну систему прототипу замінено полімерними тросами з демпферами. Це дає можливість мінімізувати механічні завади, створювані системою, усунути інерційність при здійсненні пасивних рухів, надати лабораторній тварині горизонтального фізіологічного положення та залучити для виконання пасивних рухів як окремі кінцівки, так і всі разом. Використання в запропонованому пристрої оригінального блока керування прецизійними кроковими двигунами забезпечує можливість як автономної роботи пристрою, так і роботи з використанням комп'ютеризованої системи керування. Подібне конструктивне рішення у запропонованому пристрої дозволило оцінювати часові параметри виконуваних рухів та оперативно змінювати їх напрямок. Пристрій включає блок переміщення кінцівок 15 у вигляді системи блоків та шківів на шарикопідшипниках з тросово-демпферною системою перетворення обертального моменту на послідовно-зворотні рухи кінцівок, яка складається з опорних блоків 1, допоміжних блоків 2 полімерних тросів 3 з демпферами 4. Полімерні троси 3 з демпферами 4, які переміщують кінцівки лабораторної тварини 8, приводяться в рух шківами 5, на які передається обертальне зусилля прецизійних крокових двигунів 6, розташованих поза межами екранованої експериментальної зони на нерухомій платформі 7. Робота системи контролюється за допомогою блока керування роботою крокових двигунів 9 з наступними допоміжними блоками: 2 UA 77668 U 5 10 15 20 25 блоком зміни напрямку, швидкості та черговості активації кінцівок 10, блоком живлення 11, блоком осцилографічного контролю роботи системи 12, блоком аналогово-цифрового перетворення та зв'язку з комп'ютеризованими системами 13 та блока формування синхросигналів для запуску системи моделювання пасивних рухів 14. Синхросигнал від блока 14 надходить на вхід блока зміни напрямку, швидкості та черговості активації кінцівок 10. З виходу блока 10 сигнал подається на вхід блока керування роботою крокових двигунів 9 та, згідного заданого алгоритму, сформованого блоком 10 або комп'ютеризованою системою через блок 13, запускає блок переміщення кінцівок 15 у вигляді системи блоків та шківів на шарикопідшипниках з тросово-демпферною системою перетворення обертального моменту на послідовно-зворотні рухи кінцівок, яка складається з опорних блоків 1, допоміжних блоків 2, полімерних тросів 3 з демпферами 4. Полімерні троси 3 з демпферами 4, які переміщують кінцівки лабораторної тварини 8, приводяться в рух шківами 5, яким передається обертальне зусилля прецизійних крокових двигунів 6, розташованих за межами екранованої експериментальної зони на нерухомій платформі 7. Блок живлення 11 забезпечує енергопостачання запропонованого пристрою, а блок 12 здійснює динамічний, фізичний, осцилографічний контроль ключових параметрів роботи системи. Здійснення запропонованої корисної моделі стало можливим завдяки: - використанню системи блоків та шківів на шарикопідшипниках з тросово-демпферною системою перетворення обертального моменту на послідовно-зворотні рухи кінцівок; - використанню прецизійних крокових двигунів з додатковим оригінальним блоком керування; - використанню полімерних тросів з демпферами; - заміні підшипників ковзання на шарикопідшипники; - зміні конструкції з відмовою від моторизованої рухомої доріжки для створення опори під час руху. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 30 35 Пристрій для здійснення пасивних рухів у лабораторних тварин, що складається з послідовно з'єднаних блоків переміщення кінцівок, блока керування роботою двигунів, блока зміни напрямку, швидкості та черговості залучення кінцівок, який відрізняється тим, що використано систему блоків та шківів на шарикопідшипниках з тросово-демпферною системою перетворення обертального моменту на послідовно-зворотні рухи кінцівок, а також тим, що для здійснення пасивних рухів використано два прецизійні крокові двигуни з додатковим блоком керування їх роботою. 3 UA 77668 U Комп’ютерна верстка І. Мироненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for passive movements in laboratory animals
Автори англійськоюMoroz Vasyl Maksymovych, Yoltukhivskyi Mykola Volodymyrovych, Vlasenko Oleh Volodymyrovych, Chechel Viktor Volodymyrovych, Rokunets Ihor Leonidovych, Kuzmynskyi Zaroslav Volodymyrovych, Dovhan Oleksandr Viktorovych, Suprunov Kostiantyn Viktorovych
Назва патенту російськоюУстройство для осуществления пассивных движений у лабораторных животных
Автори російськоюМороз Василий Максимович, Йолтуховський Михаил Владимирович, Власенко Олег Владимирович, Чечель Виктор Владимирович, Рокунец Игор Леонидович, Кузьминский Ярослав Владимирович, Довгань Александр Викторович, Супрунов Константин Викторович
МПК / Мітки
Мітки: рухів, пасивних, здійснення, лабораторних, тварин, пристрій
Код посилання
<a href="https://ua.patents.su/6-77668-pristrijj-dlya-zdijjsnennya-pasivnikh-rukhiv-u-laboratornikh-tvarin.html" target="_blank" rel="follow" title="База патентів України">Пристрій для здійснення пасивних рухів у лабораторних тварин</a>
Спосіб формування смуги режекції пасивних завад і пристрій для його здійснення
Номер патенту: 43977
Опубліковано: 15.10.2004
Автори: КОНОНОВИЧ ВІКТОР ЯКОВИЧ, Каспирович Олександр Генадійович, Мирошниченко Михайло Іванович, Лаврентьєв Володимир Миколайович, КУКОЛЬНИЦЬКИЙ АНАТОЛІЙ ПИЛИПОВИЧ
МПК: G01S 7/36, H04B 15/00
Мітки: здійснення, пристрій, смуги, завад, пасивних, формування, режекції, спосіб
Формула / Реферат:
1. Спосіб формування смуги режекції пасивних завад, що включає доплерівську фільтрацію частотних пачок луна-сигналів, у кожній з яких луна-сигнали ідуть з постійною частотою повторення, але яка змінюється від пачки до пачки, бланкування луна-сигналів, які попадають при різних частотах повторення у однойменні фільтри, який відрізняється тим, що доплерівську фільтрацію кожної частотної пачки луна-сигналів проводять такою кількістю доплерівських...
Спосіб оцінки розузгодження силових параметрів рухів пальців руки людини та пристрій для його здійснення
Номер патенту: 65768
Опубліковано: 15.04.2004
Автори: Шугуров Олег Олегович, Єфанова Світлана Григорівна, Ільченко Євгенія Анатоліївна, Шугуров Олег Олексійович
МПК: A61B 5/11
Мітки: силових, оцінки, людини, рухів, спосіб, розузгодження, параметрів, здійснення, пальців, пристрій, руки
Формула / Реферат:
1. Спосіб оцінки розузгодження силових параметрів рухів пальців руки людини, який включає розташування подразних електродів на шкірній поверхні руки людини та реєстрацію механограм пальців чи кінцівок при ритмічній стимуляції нерва, що активує м'яз, який відрізняється тим, що на правій та лівій кінцівці незалежно проводять реєстрацію механограм при різних навантаженнях на кінцівку при її ритмічній стимуляції пачкою імпульсів зі сталими...
Пристрій для фіксації лабораторних тварин

Номер патенту: 317
Опубліковано: 30.04.1999
Автори: Звягінцева Тетяна Володимирівна, Пилипенко Микола Іванович
Мітки: тварин, лабораторних, пристрій, фіксації
Формула / Реферат:
Пристрій для фіксації лабораторних тварин, який включає закріплені на підставці пенали з отворами у стінках, який відрізняється тим, що пенали розташовані радіально з однаковими відстанями між їхніми поздовжніми осями.
Пристрій для фіксації лабораторних тварин
Номер патенту: 35625
Опубліковано: 25.09.2008
Автор: Кирик Віталій Михайлович
МПК: A61D 3/00
Мітки: тварин, пристрій, фіксації, лабораторних
Формула / Реферат:
Пристрій для фіксації лабораторних тварин, що включає фіксуючий елемент, який відрізняється тим, що являє собою пенал, виконаний з прозорого полімерного матеріалу, у верхній стінці якого розташований вхідний отвір з поздовжнім розрізом, який переходить в S-подібний розріз на передній стінці і закінчується отвором.
Пристрій для тримання та ловлі лабораторних тварин
Номер патенту: 72964
Опубліковано: 10.09.2012
Автор: Шугуров Олег Олегович
МПК: A61D 3/00
Мітки: пристрій, тварин, тримання, лабораторних, ловлі
Формула / Реферат:
1. Пристрій для тримання та ловлі мілких лабораторних тварин, що включає дві шарнірно сполучені телескопічні бранші з кільцями для пальців та зубцюватим стопором, робочі кінці бранш зігнуті униз, який відрізняється тим, що до робочих кінців пристрою шарнирно прикріплені захвати, які протистоять один одному, розташовані між робочими кінцями та виконані у вигляді прямокутних паралелепіпедів з проточкою з одного боку та штифтом - з іншого, при...
Попередній патент: Спосіб розкриття законтурних запасів корисних копалин
Наступний патент: Спосіб відновлення земної поверхні, порушеної підземними гірничими роботами
Випадковий патент: Ємкость для роботи під внутрішнім надлишковим тиском