Спосіб різання силосованих кормів
Номер патенту: 77965
Опубліковано: 11.03.2013
Автори: Руткевич Володимир Степанович, Середа Леонід Павлович, Іванов Микола Іванович, Зінєв Михайло Вікторович

Формула / Реферат
Спосіб різання силосованих кормів, що включає різання кормового моноліту спеціальним робочим органом, за рахунок використання трикутних ножів з випуклими гранями, який відрізняється тим, що різання кормового моноліту відбувається за рахунок маятникового руху рухомих ножів, що забезпечує різання з ковзанням.
Текст
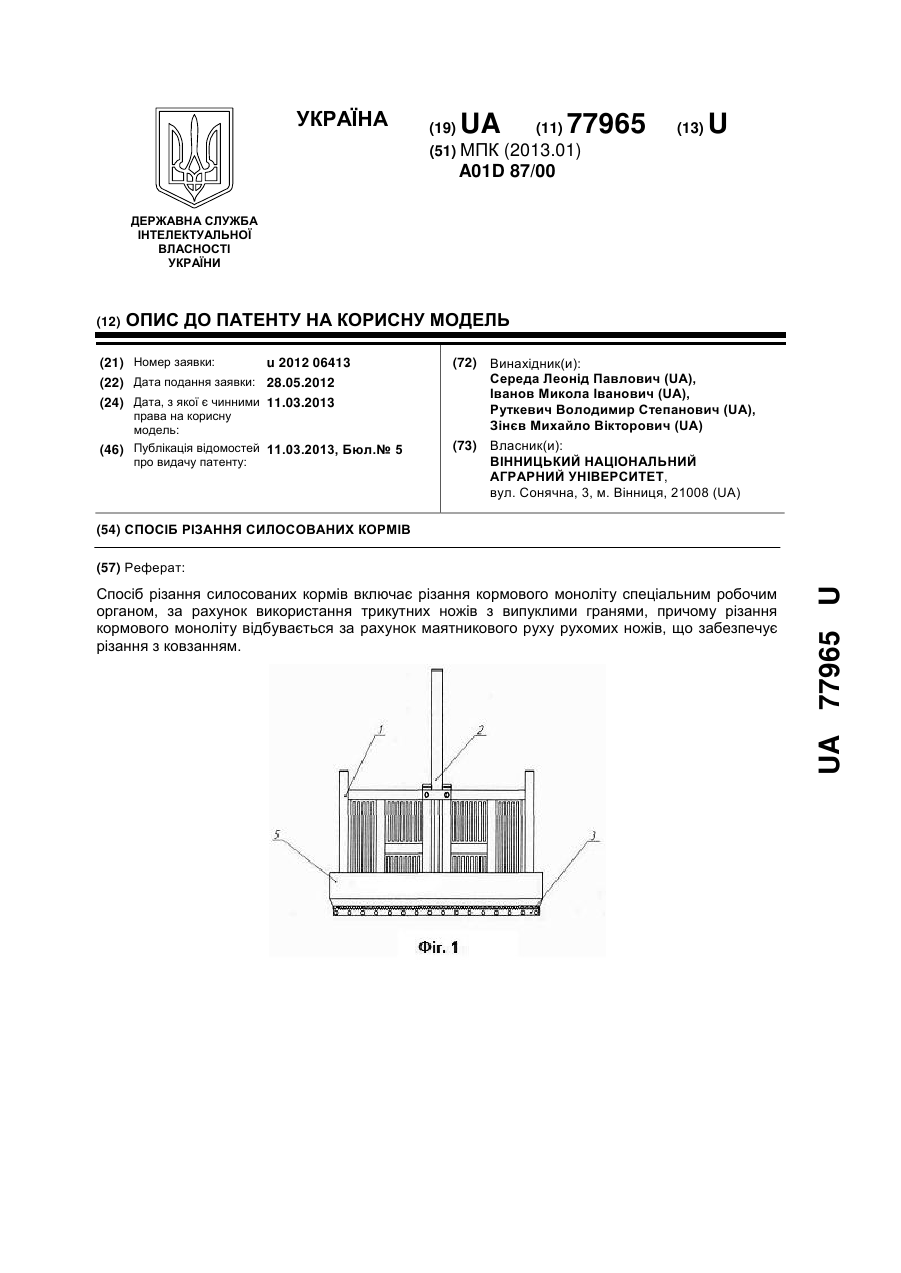
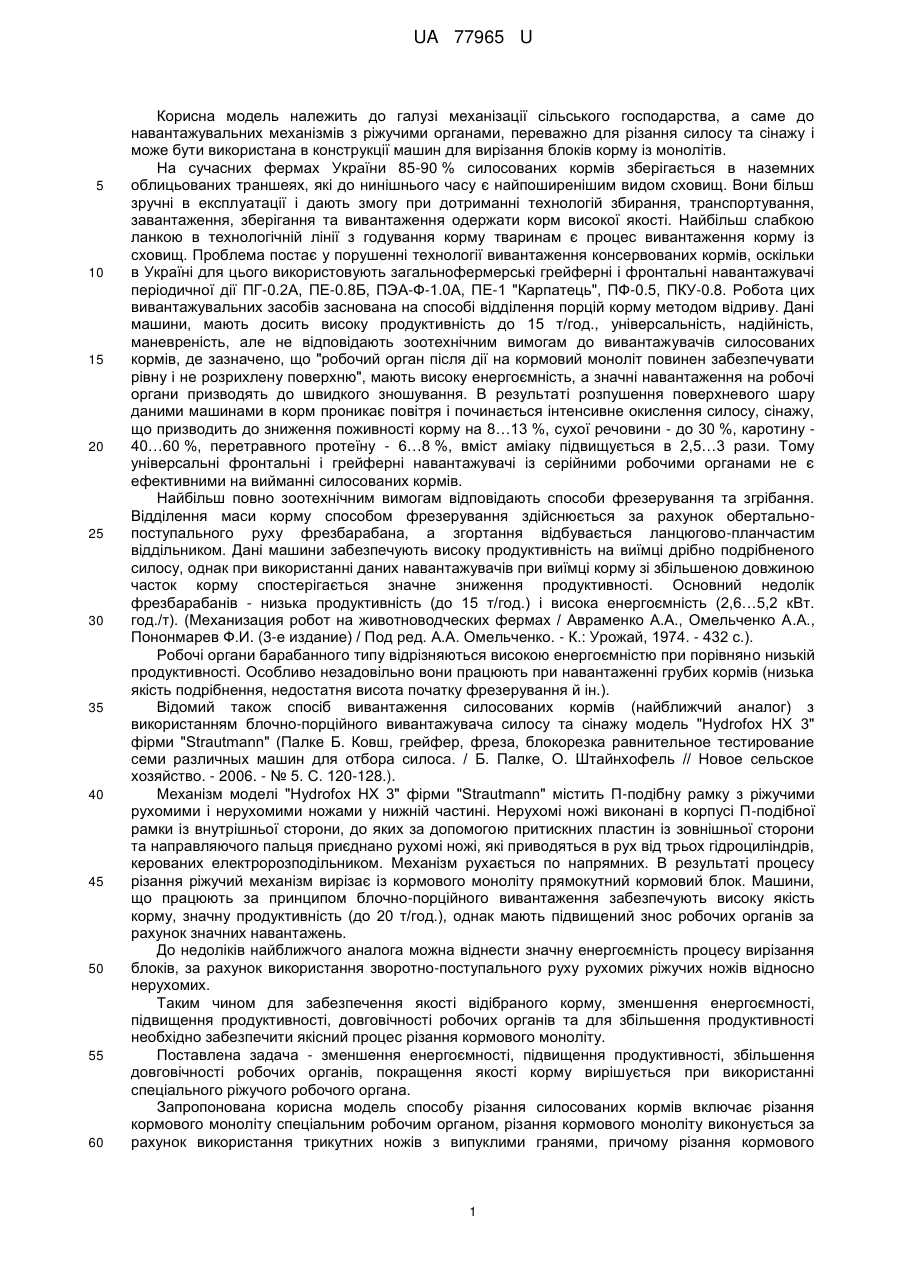
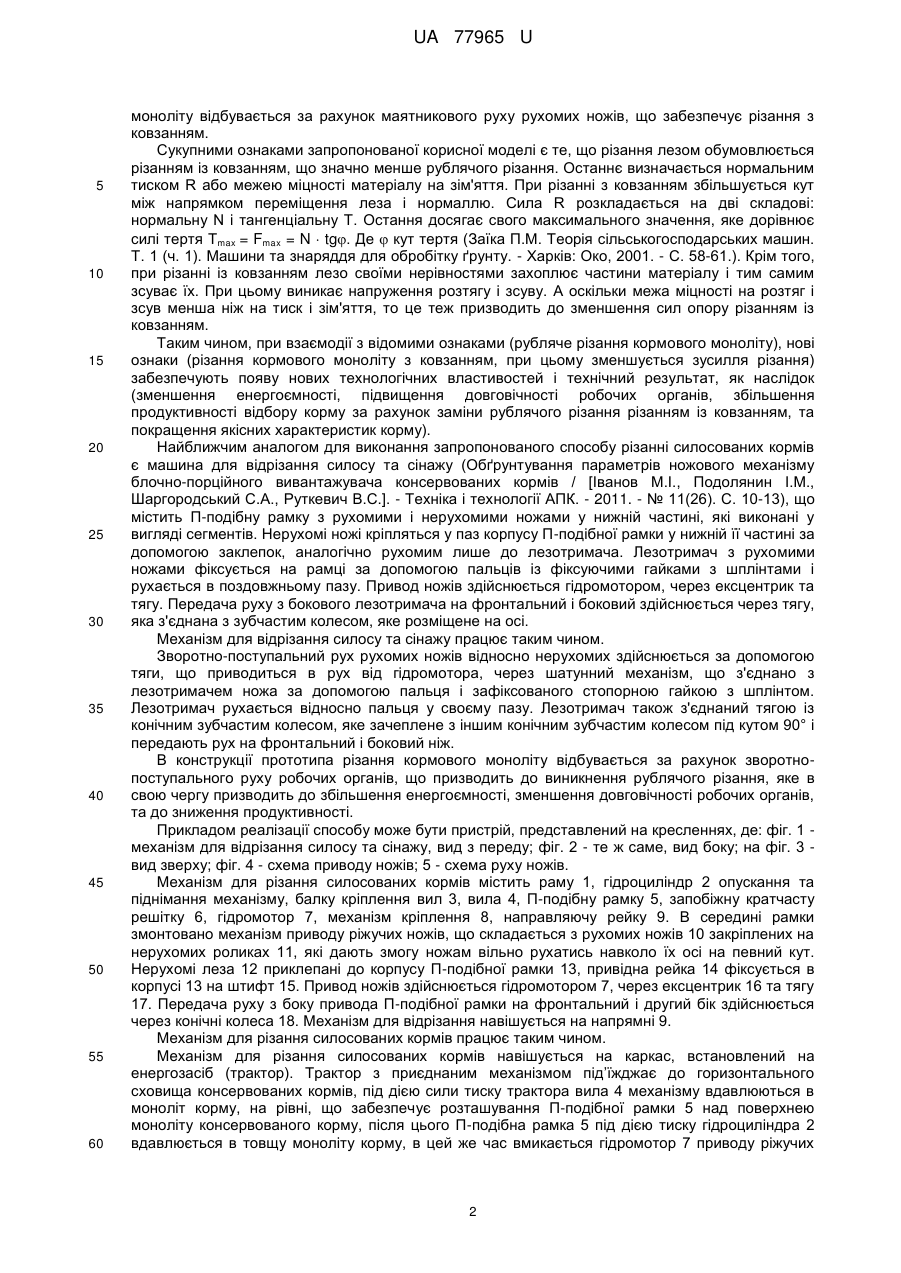
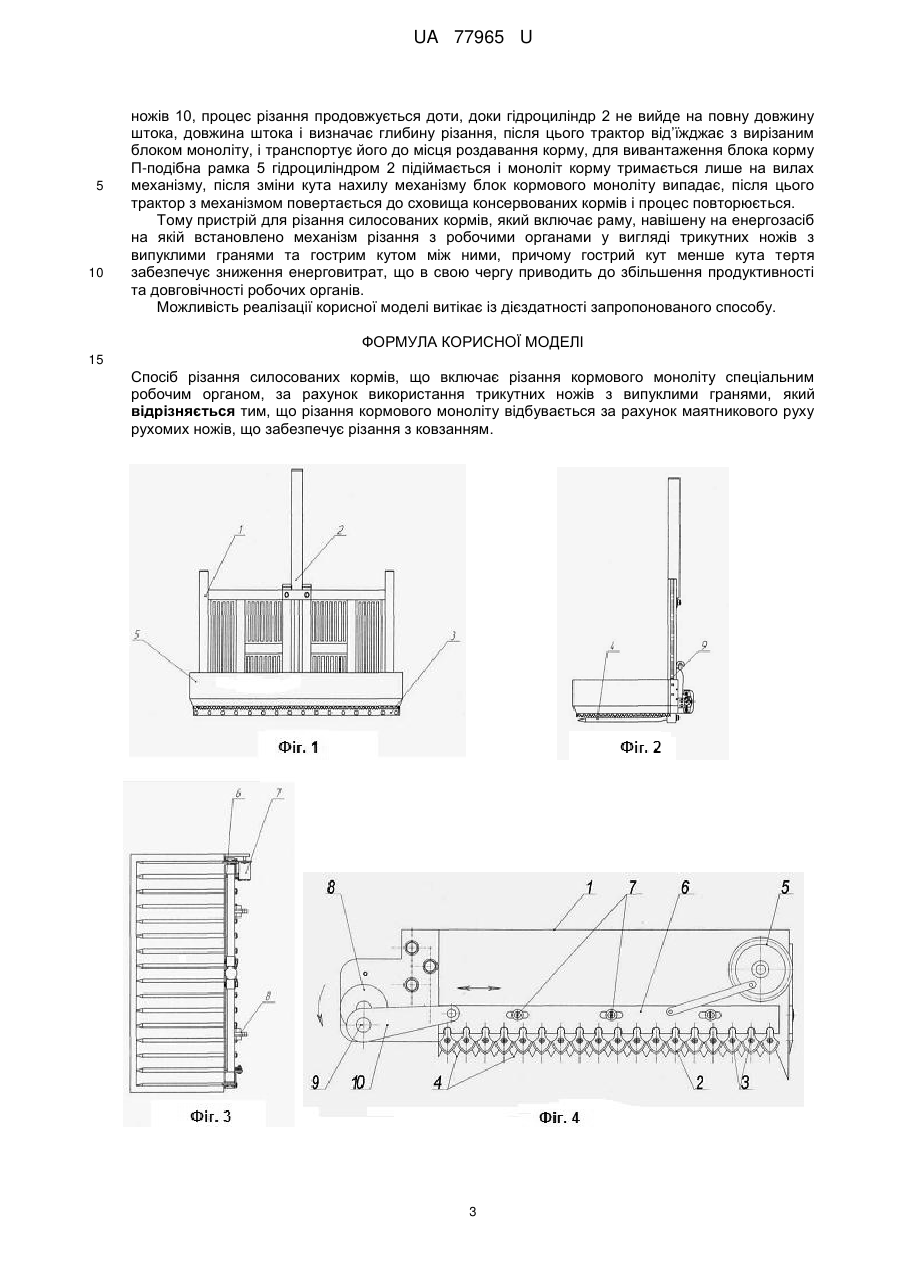
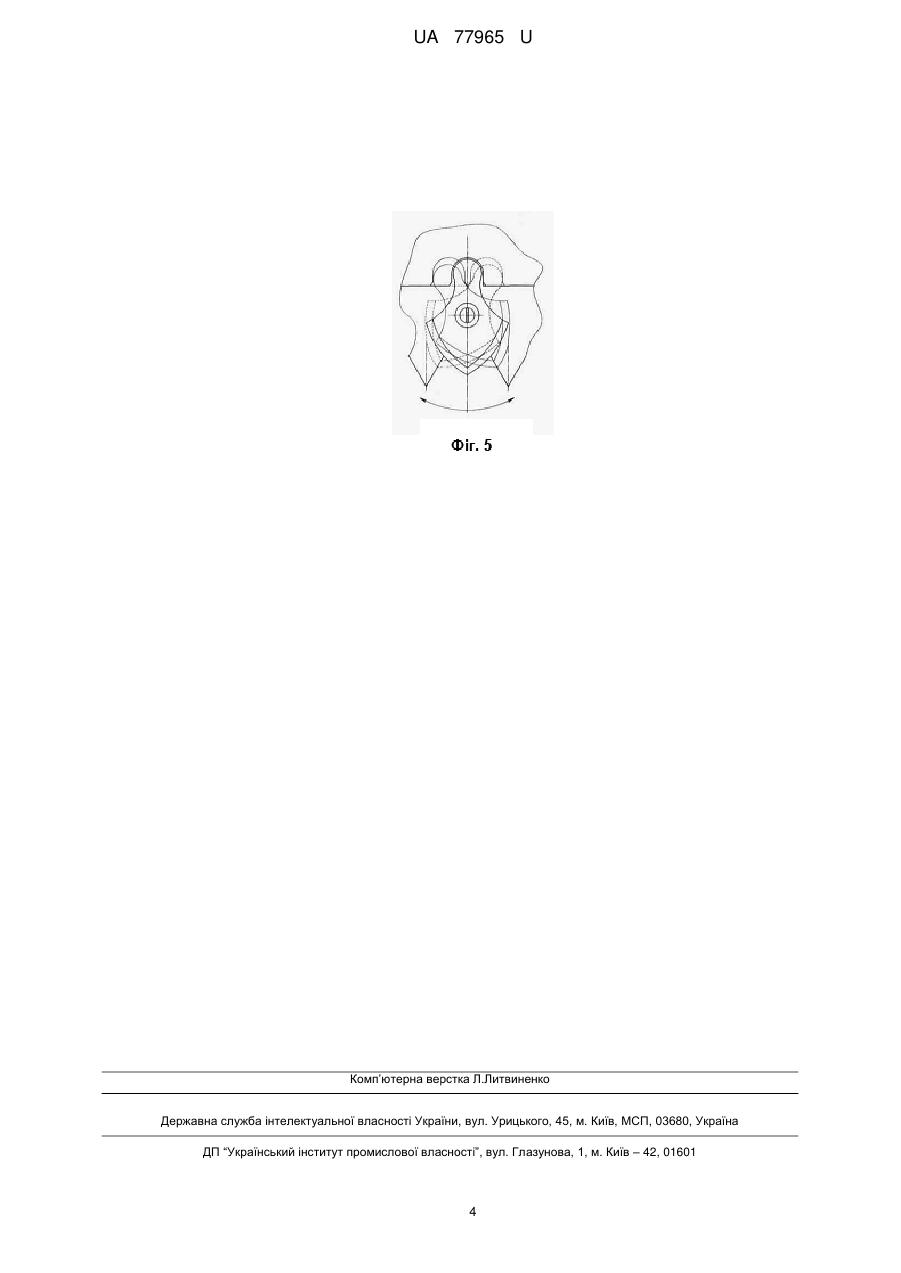
Реферат: UA 77965 U UA 77965 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі механізації сільського господарства, а саме до навантажувальних механізмів з ріжучими органами, переважно для різання силосу та сінажу і може бути використана в конструкції машин для вирізання блоків корму із монолітів. На сучасних фермах України 85-90 % силосованих кормів зберігається в наземних облицьованих траншеях, які до нинішнього часу є найпоширенішим видом сховищ. Вони більш зручні в експлуатації і дають змогу при дотриманні технологій збирання, транспортування, завантаження, зберігання та вивантаження одержати корм високої якості. Найбільш слабкою ланкою в технологічній лінії з годування корму тваринам є процес вивантаження корму із сховищ. Проблема постає у порушенні технології вивантаження консервованих кормів, оскільки в Україні для цього використовують загальнофермерські грейферні і фронтальні навантажувачі періодичної дії ПГ-0.2А, ПЕ-0.8Б, ПЭА-Ф-1.0А, ПЕ-1 "Карпатець", ПФ-0.5, ПКУ-0.8. Робота цих вивантажувальних засобів заснована на способі відділення порцій корму методом відриву. Дані машини, мають досить високу продуктивність до 15 т/год., універсальність, надійність, маневреність, але не відповідають зоотехнічним вимогам до вивантажувачів силосованих кормів, де зазначено, що "робочий орган після дії на кормовий моноліт повинен забезпечувати рівну і не розрихлену поверхню", мають високу енергоємність, а значні навантаження на робочі органи призводять до швидкого зношування. В результаті розпушення поверхневого шару даними машинами в корм проникає повітря і починається інтенсивне окислення силосу, сінажу, що призводить до зниження поживності корму на 8…13 %, сухої речовини - до 30 %, каротину 40…60 %, перетравного протеїну - 6…8 %, вміст аміаку підвищується в 2,5…3 рази. Тому універсальні фронтальні і грейферні навантажувачі із серійними робочими органами не є ефективними на вийманні силосованих кормів. Найбільш повно зоотехнічним вимогам відповідають способи фрезерування та згрібання. Відділення маси корму способом фрезерування здійснюється за рахунок обертальнопоступального руху фрезбарабана, а згортання відбувається ланцюгово-планчастим віддільником. Дані машини забезпечують високу продуктивність на виїмці дрібно подрібненого силосу, однак при використанні даних навантажувачів при виїмці корму зі збільшеною довжиною часток корму спостерігається значне зниження продуктивності. Основний недолік фрезбарабанів - низька продуктивність (до 15 т/год.) і висока енергоємність (2,6…5,2 кВт. год./т). (Механизация робот на животноводческих фермах / Авраменко А.А., Омельченко А.А., Пононмарев Ф.И. (3-е издание) / Под ред. А.А. Омельченко. - К.: Урожай, 1974. - 432 с.). Робочі органи барабанного типу відрізняються високою енергоємністю при порівняно низькій продуктивності. Особливо незадовільно вони працюють при навантаженні грубих кормів (низька якість подрібнення, недостатня висота початку фрезерування й ін.). Відомий також спосіб вивантаження силосованих кормів (найближчий аналог) з використанням блочно-порційного вивантажувача силосу та сінажу модель "Hydrofox HX 3" фірми "Strautmann" (Палке Б. Ковш, грейфер, фреза, блокорезка равнительное тестирование семи различных машин для отбора силоса. / Б. Палке, О. Штайнхофель // Новое сельское хозяйство. - 2006. - № 5. С. 120-128.). Механізм моделі "Hydrofox HX 3" фірми "Strautmann" містить П-подібну рамку з ріжучими рухомими і нерухомими ножами у нижній частині. Нерухомі ножі виконані в корпусі П-подібної рамки із внутрішньої сторони, до яких за допомогою притискних пластин із зовнішньої сторони та направляючого пальця приєднано рухомі ножі, які приводяться в рух від трьох гідроциліндрів, керованих електророзподільником. Механізм рухається по напрямних. В результаті процесу різання ріжучий механізм вирізає із кормового моноліту прямокутний кормовий блок. Машини, що працюють за принципом блочно-порційного вивантаження забезпечують високу якість корму, значну продуктивність (до 20 т/год.), однак мають підвищений знос робочих органів за рахунок значних навантажень. До недоліків найближчого аналога можна віднести значну енергоємність процесу вирізання блоків, за рахунок використання зворотно-поступального руху рухомих ріжучих ножів відносно нерухомих. Таким чином для забезпечення якості відібраного корму, зменшення енергоємності, підвищення продуктивності, довговічності робочих органів та для збільшення продуктивності необхідно забезпечити якісний процес різання кормового моноліту. Поставлена задача - зменшення енергоємності, підвищення продуктивності, збільшення довговічності робочих органів, покращення якості корму вирішується при використанні спеціального ріжучого робочого органа. Запропонована корисна модель способу різання силосованих кормів включає різання кормового моноліту спеціальним робочим органом, різання кормового моноліту виконується за рахунок використання трикутних ножів з випуклими гранями, причому різання кормового 1 UA 77965 U 5 10 15 20 25 30 35 40 45 50 55 60 моноліту відбувається за рахунок маятникового руху рухомих ножів, що забезпечує різання з ковзанням. Сукупними ознаками запропонованої корисної моделі є те, що різання лезом обумовлюється різанням із ковзанням, що значно менше рублячого різання. Останнє визначається нормальним тиском R або межею міцності матеріалу на зім'яття. При різанні з ковзанням збільшується кут між напрямком переміщення леза і нормаллю. Сила R розкладається на дві складові: нормальну N і тангенціальну Т. Остання досягає свого максимального значення, яке дорівнює силі тертя Tmax = Fmax = N tg. Де кут тертя (Заїка П.М. Теорія сільськогосподарських машин. Т. 1 (ч. 1). Машини та знаряддя для обробітку ґрунту. - Харків: Око, 2001. - С. 58-61.). Крім того, при різанні із ковзанням лезо своїми нерівностями захоплює частини матеріалу і тим самим зсуває їх. При цьому виникає напруження розтягу і зсуву. А оскільки межа міцності на розтяг і зсув менша ніж на тиск і зім'яття, то це теж призводить до зменшення сил опору різанням із ковзанням. Таким чином, при взаємодії з відомими ознаками (рубляче різання кормового моноліту), нові ознаки (різання кормового моноліту з ковзанням, при цьому зменшується зусилля різання) забезпечують появу нових технологічних властивостей і технічний результат, як наслідок (зменшення енергоємності, підвищення довговічності робочих органів, збільшення продуктивності відбору корму за рахунок заміни рублячого різання різанням із ковзанням, та покращення якісних характеристик корму). Найближчим аналогом для виконання запропонованого способу різанні силосованих кормів є машина для відрізання силосу та сінажу (Обґрунтування параметрів ножового механізму блочно-порційного вивантажувача консервованих кормів / [Іванов М.І., Подолянин І.М., Шаргородський С.А., Руткевич B.C.]. - Техніка і технології АПК. - 2011. - № 11(26). С. 10-13), що містить П-подібну рамку з рухомими і нерухомими ножами у нижній частині, які виконані у вигляді сегментів. Нерухомі ножі кріпляться у паз корпусу П-подібної рамки у нижній її частині за допомогою заклепок, аналогічно рухомим лише до лезотримача. Лезотримач з рухомими ножами фіксується на рамці за допомогою пальців із фіксуючими гайками з шплінтами і рухається в поздовжньому пазу. Привод ножів здійснюється гідромотором, через ексцентрик та тягу. Передача руху з бокового лезотримача на фронтальний і боковий здійснюється через тягу, яка з'єднана з зубчастим колесом, яке розміщене на осі. Механізм для відрізання силосу та сінажу працює таким чином. Зворотно-поступальний рух рухомих ножів відносно нерухомих здійснюється за допомогою тяги, що приводиться в рух від гідромотора, через шатунний механізм, що з'єднано з лезотримачем ножа за допомогою пальця і зафіксованого стопорною гайкою з шплінтом. Лезотримач рухається відносно пальця у своєму пазу. Лезотримач також з'єднаний тягою із конічним зубчастим колесом, яке зачеплене з іншим конічним зубчастим колесом під кутом 90° і передають рух на фронтальний і боковий ніж. В конструкції прототипа різання кормового моноліту відбувається за рахунок зворотнопоступального руху робочих органів, що призводить до виникнення рублячого різання, яке в свою чергу призводить до збільшення енергоємності, зменшення довговічності робочих органів, та до зниження продуктивності. Прикладом реалізації способу може бути пристрій, представлений на кресленнях, де: фіг. 1 механізм для відрізання силосу та сінажу, вид з переду; фіг. 2 - те ж саме, вид боку; на фіг. 3 вид зверху; фіг. 4 - схема приводу ножів; 5 - схема руху ножів. Механізм для різання силосованих кормів містить раму 1, гідроциліндр 2 опускання та піднімання механізму, балку кріплення вил 3, вила 4, П-подібну рамку 5, запобіжну кратчасту решітку 6, гідромотор 7, механізм кріплення 8, направляючу рейку 9. В середині рамки змонтовано механізм приводу ріжучих ножів, що складається з рухомих ножів 10 закріплених на нерухомих роликах 11, які дають змогу ножам вільно рухатись навколо їх осі на певний кут. Нерухомі леза 12 приклепані до корпусу П-подібної рамки 13, привідна рейка 14 фіксується в корпусі 13 на штифт 15. Привод ножів здійснюється гідромотором 7, через ексцентрик 16 та тягу 17. Передача руху з боку привода П-подібної рамки на фронтальний і другий бік здійснюється через конічні колеса 18. Механізм для відрізання навішується на напрямні 9. Механізм для різання силосованих кормів працює таким чином. Механізм для різання силосованих кормів навішується на каркас, встановлений на енергозасіб (трактор). Трактор з приєднаним механізмом під’їжджає до горизонтального сховища консервованих кормів, під дією сили тиску трактора вила 4 механізму вдавлюються в моноліт корму, на рівні, що забезпечує розташування П-подібної рамки 5 над поверхнею моноліту консервованого корму, після цього П-подібна рамка 5 під дією тиску гідроциліндра 2 вдавлюється в товщу моноліту корму, в цей же час вмикається гідромотор 7 приводу ріжучих 2 UA 77965 U 5 10 ножів 10, процес різання продовжується доти, доки гідроциліндр 2 не вийде на повну довжину штока, довжина штока і визначає глибину різання, після цього трактор від’їжджає з вирізаним блоком моноліту, і транспортує його до місця роздавання корму, для вивантаження блока корму П-подібна рамка 5 гідроциліндром 2 підіймається і моноліт корму тримається лише на вилах механізму, після зміни кута нахилу механізму блок кормового моноліту випадає, після цього трактор з механізмом повертається до сховища консервованих кормів і процес повторюється. Тому пристрій для різання силосованих кормів, який включає раму, навішену на енергозасіб на якій встановлено механізм різання з робочими органами у вигляді трикутних ножів з випуклими гранями та гострим кутом між ними, причому гострий кут менше кута тертя забезпечує зниження енерговитрат, що в свою чергу приводить до збільшення продуктивності та довговічності робочих органів. Можливість реалізації корисної моделі витікає із дієздатності запропонованого способу. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 Спосіб різання силосованих кормів, що включає різання кормового моноліту спеціальним робочим органом, за рахунок використання трикутних ножів з випуклими гранями, який відрізняється тим, що різання кормового моноліту відбувається за рахунок маятникового руху рухомих ножів, що забезпечує різання з ковзанням. 3 UA 77965 U Комп’ютерна верстка Л.Литвиненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for cutting ensilage fodders
Автори англійськоюSereda Leonid Pavlovych, Ivanov Mykola Ivanovych, Rutkevych Volodymyr Stepanovych, Ziniev Mykhailo Viktorovych
Назва патенту російськоюСпособ резания силосованных кормов
Автори російськоюСереда Леонид Павлович, Иванов Николай Иванович, Руткевич Владимир Степанович, Зинев Михаил Викторович
МПК / Мітки
МПК: A01D 87/00
Мітки: силосованих, різання, кормів, спосіб
Код посилання
<a href="https://ua.patents.su/6-77965-sposib-rizannya-silosovanikh-kormiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб різання силосованих кормів</a>
Спосіб одержання силосованих кормів для годівлі лактуючих корів
Номер патенту: 77750
Опубліковано: 15.01.2007
Автори: Царенко Іван Григорович, Дубина Олена Василівна, Вербич Іван Васильович, Таєнчук Павло Кирилович, Молдован Жанна Андріївна
МПК: A23K 1/00
Мітки: годівлі, одержання, спосіб, силосованих, корів, лактуючих, кормів
Формула / Реферат:
1 Спосіб одержання силосованих кормів для годівлі лактуючих корів, який відрізняється тим, що для одержання силосованого корму використовують силос кукурудзи та гірчиці у співвідношенні компонентів 7,5:2,5.2. Спосіб одержання силосованих кормів для годівлі лактуючих корів, який відрізняється тим, що для одержання силосованого корму використовують силос кукурудзи та гірчиці у співвідношенні компонентів 8,6:1.3. Спосіб за п. 2,...
Самогодівниця для видачі подрібнених силосованих кормів тваринам
Номер патенту: 24289
Опубліковано: 25.06.2007
Автори: Ревенко Іван Іванович, Лісовенко Тетяна Олексіївна, Хмельовський Василь Степанович
МПК: A01K 5/01, B62D 65/00
Мітки: видачі, силосованих, подрібнених, самогодівниця, кормів, тваринам
Формула / Реферат:
Самогодівниця для видачі подрібнених силосованих кормів тваринам, що містить розміщену на ходовій рамі платформу з бункером, повздовжніми і поперечними бортами та днищем, виконані в повздовжніх бортах кормові вікна, в нижній частині яких шарнірно кріпляться два кормові лотки на довжину самогодівниці, розміщені по її обидва боки, яка відрізняється тим, що в бункері вздовж його осі симетрії жорстко закріплена розподільча стінка і встановлені...
Самогодівниця для видачі подрібнених силосованих кормів тваринам
Номер патенту: 60104
Опубліковано: 15.09.2003
Автор: Кузьміч Ярослав Анатолійович
МПК: B62D 63/00, A01K 5/01
Мітки: видачі, силосованих, тваринам, самогодівниця, кормів, подрібнених
Формула / Реферат:
1. Самогодівниця для видачі подрібнених силосованих кормів тваринам, що включає встановлену на ходовій рамі платформу з поздовжніми і поперечними бортами та днищем, виконані в поздовжніх бортах кормові вікна, шарнірно закріплені в нижніх частинах кормових вікон кормові лотки та встановлені у верхніх частинах вказаних вікон пристосування для фіксації кормових лотків у транспортному положенні, яка відрізняється тим, що платформа оснащена...
Пристрій для визначення сили різання консервованих кормів
Номер патенту: 74657
Опубліковано: 12.11.2012
Автори: Шаргородський Сергій Анатолійович, Руткевич Володимир Степанович, Іванов Микола Іванович, Шарий Анатолій Іванович, Шарий Олександр Іванович
МПК: G01L 5/16
Мітки: пристрій, визначення, консервованих, сили, кормів, різання
Формула / Реферат:
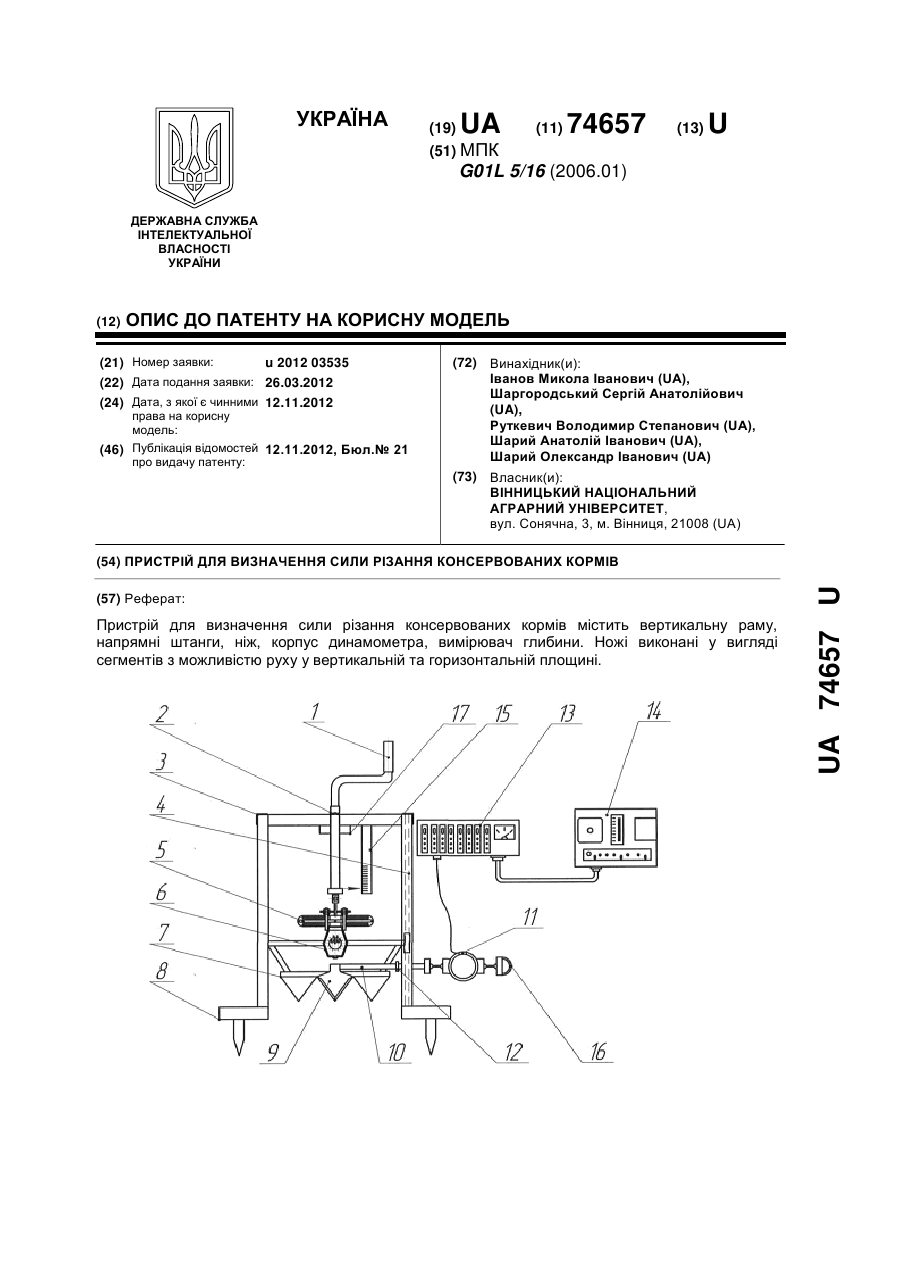
Пристрій для визначення сили різання консервованих кормів, що містить вертикальну раму, на якій закріплено направляючі штанги, ніж, корпус динамометра, що рухаються по штангах, який відрізняється тим, що встановлено вимірювач глибини входження леза в матеріал у вигляді лінійки, а ножі виконані у вигляді двох сегментів з можливістю руху у вертикальній площині і одного з можливістю руху у вертикальній та горизонтальній площині, які з'єднані з...
Пристрій для визначення сили різання консервованих кормів
Номер патенту: 71471
Опубліковано: 10.07.2012
Автори: Іванов Микола Іванович, Подолянин Іван Михайлович, Турич Валерій Володимирович, Шаргородський Сергій Анатолійович, Руткевич Володимир Степанович
МПК: G01L 5/16
Мітки: кормів, різання, консервованих, сили, пристрій, визначення
Формула / Реферат:
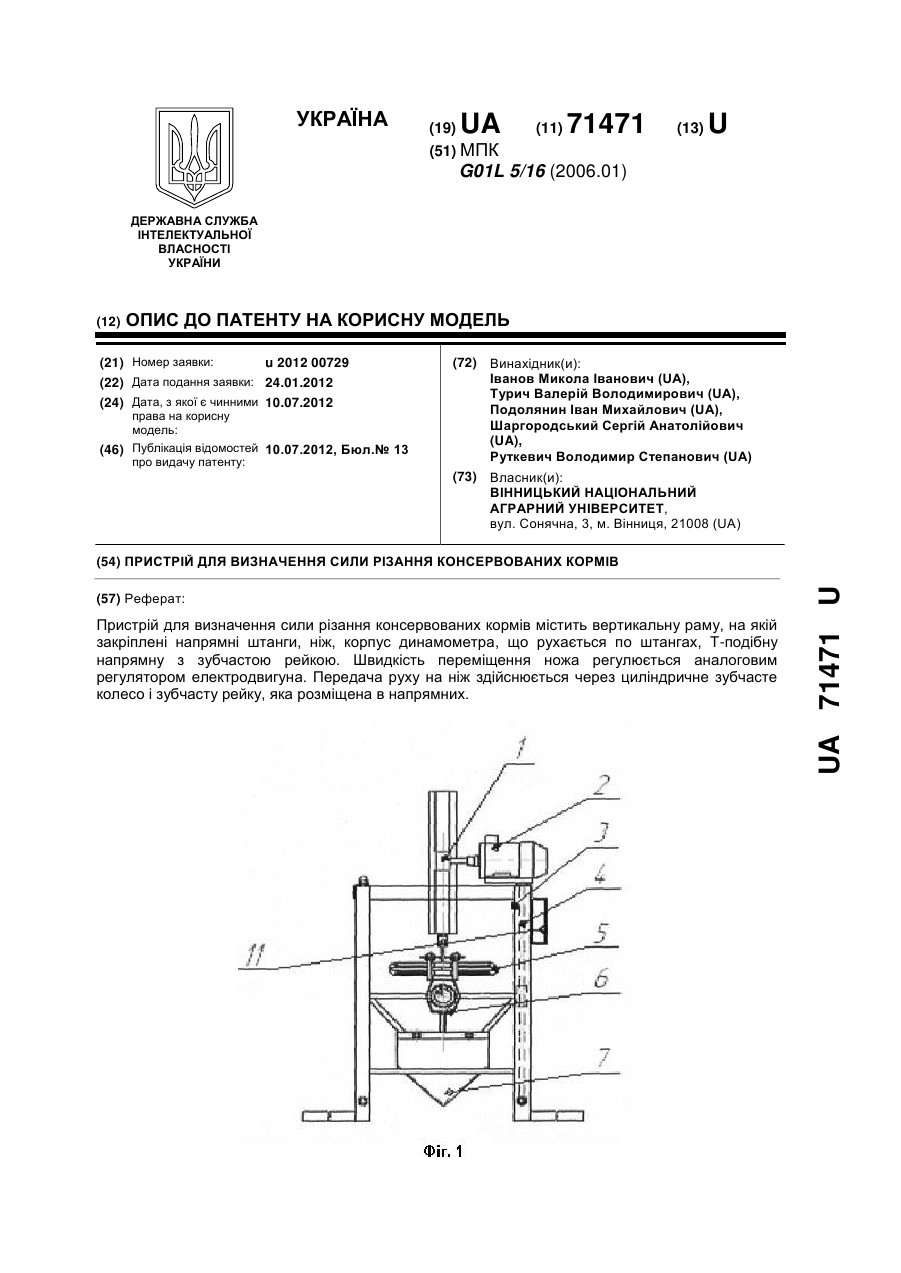
Пристрій для визначення сили різання консервованих кормів, що містить вертикальну раму, на якій закріплено напрямні штанги, ніж, корпус динамометра, що рухається по штангах, Т-подібну напрямну з зубчастою рейкою, який відрізняється тим, що швидкість переміщення ножа регулюється аналоговим регулятором електродвигуна, а передача руху на ніж здійснюється через циліндричне зубчасте колесо і зубчасту рейку, яка розміщена в напрямних.
Попередній патент: Спосіб прокатки тонкостінних і особливо тонкостінних труб
Наступний патент: Спосіб знешкодження непридатних пестицидів та хлор-, фосфор-, сірко-, нітроорганічних речовин
Випадковий патент: Спосіб установки лічильника