Оптико-електронний теплопеленгатор
Номер патенту: 80041
Опубліковано: 10.08.2007
Автори: Черняк Сергій Іванович, Бузанов Віктор Іванович, Король Іван Іванович, Кадочніков Сергій Михайлович
Формула / Реферат
1. Оптико-електронний теплопеленгатор, що включає послідовно з'єднані - оптичну схему, яка містить оптично сполучені скануюче дзеркало, об'єктив і оптичний модулятор, а також n-канальний фотоприймальний блок, виконаний у вигляді n-елементного приймача випромінювання, розташованого у фокальній площині об'єктива оптичної системи, схему обробки відеосигналів, яка містить n-канальний відеопідсилювач, формувач координат цілей, а також блок сканування, кінематично з'єднаний зі скануючим дзеркалом оптичної системи та підключений до одного із входів формувача координат цілей, виконаного з можливістю програмування для забезпечення визначення кутових координат теплоконтрастних цілей і з'єднаного із системою індикації, що формує зображення теплоконтрастних цілей для аналізу оператором, який відрізняється тим, що в кожний з n каналів схеми обробки відеосигналів додатково введені блок формування змінної складової відеосигналу, блоки обробки позитивних і негативних відеосигналів і селектор відеосигналів, при цьому вхід кожного блока фомування змінної складової відеосигналу підключений до відповідного виходу n-канального відеопідсилювача, а вихід паралельно підключений до входів блоків обробки позитивних і негативних відеосигналів, виходи яких підключені до першого та другого входів відповідного селектора сигналів, а виходи кожного з n селекторів сигналів підключені до відповідного входу програмувального блока формування координат теплоконтрастних цілей.
2. Оптико-електронний теплопеленгатор за п. 1, який відрізняється тим, що блок формування змінної складової відеосигналу складається з послідовно з'єднаних інвертора, лінії затримки, суматора й підсилювача, при цьому вхід блока формування змінної складової відеосигналу є входом інвертора та першим входом суматора, а виходом цього блока є вихід підсилювача, причому час затримки сигналу лінією затримки відповідає тривалості відеосигналу, який зареєстрований від віддаленої цілі та визначається із співвідношення
![]() , де
, де
![]() - кутовий розмір миттєвого поля зору пристрою;
- кутовий розмір миттєвого поля зору пристрою;
![]() - кутова швидкість сканування.
- кутова швидкість сканування.
3. Оптико-електронний теплопеленгатор за п. 1, який відрізняється тим, що блок обробки позитивних відеосигналів складається з послідовно з'єднаних випрямляча позитивного сигналу, блока формування середнього рівня, порогової схеми позитивного сигналу, а також мультивібратора, вихід випрямляча позитивного сигналу паралельно підключений до другого входу порогової схеми позитивного сигналу, при цьому входом блока обробки позитивних відеосигналів є вхід випрямляча позитивного сигналу, а виходом - вихід мультивібратора, а тривалість імпульсів відеосигналу, сформованих мультивібратором, визначається із співвідношень:
![]() ,
,  , де
, де
![]() - максимальний спостережуваний лінійний розмір об'єкта випромінювання;
- максимальний спостережуваний лінійний розмір об'єкта випромінювання;
![]() - мінімальна дальність його виявлення.
- мінімальна дальність його виявлення.
4. Оптико-електронний теплопеленгатор за п. 1, який відрізняється тим, що блок обробки негативних відеосигналів складається з послідовно з'єднаних випрямляча негативного сигналу, порогової схеми негативного сигналу та інвертора, вихід випрямляча негативного сигналу паралельно підключений до другого входу порогової схеми негативного сигналу, при цьому входом блока обробки негативних відеосигналів є вхід випрямляча негативного сигналу, а виходом - вихід інвертора.
5. Оптико-електронний теплопеленгатор за п. 1, який відрізняється тим, що програмувальний формувач координат теплоконтрастних цілей виконаний у вигляді мікропроцесора, запрограмованого з можливістю реалізації алгоритму визначення координат теплоконтрастних цілей за співвідношеннями:
![]()
![]() , де
, де
![]() - кути орієнтації блока сканування на момент надходження від і-ої цілі;
- кути орієнтації блока сканування на момент надходження від і-ої цілі;
![]() - кутова неузгодженість j-ого фотоприймача відносно центра фотоприймального пристрою.
- кутова неузгодженість j-ого фотоприймача відносно центра фотоприймального пристрою.
Текст
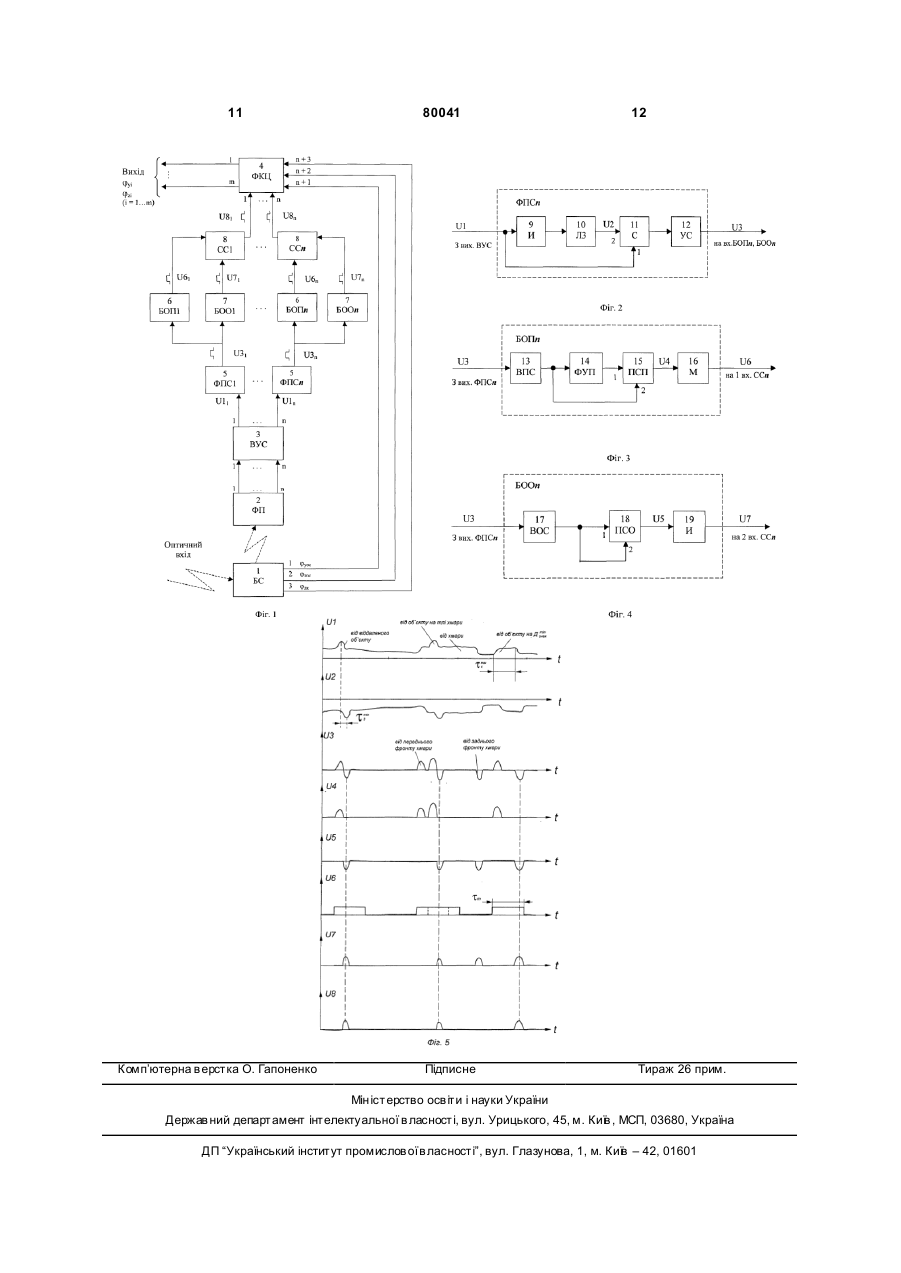
1. Оптико-електронний теплопеленгатор, що включає послідовно з'єднані - оптичну схему, яка містить оптично сполучені скануюче дзеркало, об'єктив і оптичний модулятор, а також nканальний фотоприймальний блок, виконаний у вигляді n-елементного приймача випромінювання, розташованого у фокальній площині об'єктива оптичної системи, схему обробки відеосигналів, яка містить n-канальний відеопідсилювач, формувач координат цілей, а також блок сканування, кінематично з'єднаний зі скануючим дзеркалом оптичної системи та підключений до одного із входів формувача координат цілей, виконаного з можливістю програмування для забезпечення визначення кутових координат теплоконтрастних цілей і з'єднаного із системою індикації, що формує зображення теплоконтрастних цілей для аналізу оператором, який відрізняється тим, що в кожний з n каналів схеми обробки відеосигналів додатково введені блок формування змінної складової відеосигналу, блоки обробки позитивних і негативних відеосигналів і селектор відеосигналів, при цьому вхід кожного блока фомування змінної складової відеосигналу підключений до відповідного виходу n-канального відеопідсилювача, а вихід паралель 2 (19) 1 3 80041 4 4. Оптико-електронний теплопеленгатор за п. 1, який відрізняється тим, що блок обробки негативних відеосигналів складається з послідовно з'єднаних випрямляча негативного сигналу, порогової схеми негативного сигналу та інвертора, вихід випрямляча негативного сигналу паралельно підключений до другого входу порогової схеми негативного сигналу, при цьому входом блока обробки негативних відеосигналів є вхід випрямляча негативного сигналу, а виходом - ви хід інвертора. 5. Оптико-електронний теплопеленгатор за п. 1, який відрізняється тим, що програмувальний формувач координат теплоконтрастних цілей виконаний у вигляді мікропроцесора, запрограмованого з можливістю реалізації алгоритму визначення координат теплоконтрастних цілей за співвідношеннями: j Zi = j Zоос Технічне рішення, що заявляється, відноситься до області спеціального приладобудування, зокрема, до оптико-електронних систем оптичної пеленгації й може бути використане в системах наведення й керування авіаційних комплексів. Відомі авіаційні оптико-електронні теплопеленгатори (ТП), призначені для пошуку, виявлення й визначення кутови х координат цілей на основі використання їхнього пасивного випромінювання електромагнітної енергії інфрачервоного діапазону [див. Лазарев Л.П. «Инфракрасные и световые приборы самонаведения и наведения летательных аппаратов», М. « Машиностроение», 1976г., стр.258]. У відомих ТП пошук і виявлення цілей здійснюється на різних фонах, які є для теплопеленгатора джерелом перешкод, що значно ускладнює процес виявлення корисного сигналу. Аналіз роботи відомих теплопеленгаторів показує, що куто ві розміри цілей значно менші, ніж кутові розміри об'єктів фону. Відомий ТП [див. Катыс Г.П. «Восприятие и анализ оптической информации автоматической системой», М., « Машиностроение», 1986г., стр.14, стр.158-176], що містить послідовно підключені оптичну схему, оптичний модулятор, приймач випромінювання й схему обробки сигналу, що сполучається з індикатором для аналізу інформації оператором. При цьому як оптичний модулятор застосовується обертовий растр, що забезпечує просторову фільтрацію фонових перешкод, що значно знижує величину фонових засвітлень, особливо фонове опромінення приймача випромінювання світлом, відбитим від хмар [стор.158-176]. Даний модулятор одночасно з фоновим засвітленням пропорційно зменшує й величину корисного сигналу, що є істотним недоліком ТП. Найбільш близьким по технічній суті й розв'язуваних задачах є відомий оптико-електронний ТП [див. Каделкин В.В., Усольцев И.Ф., «Основы инфракрасной техники», М., «Ма шиностроение», 1985г., стр.193-196], узятий як прототип. Даний ТП містить послідовно включені - оптичну схему, що включає оптично сполучені скануюче дзеркало, об'єктив, а також оптичний модулятор, фотоприйомний блок, виконаний у вигляді n елементного приймача випромінювання, розташованого у фокальній площині об'єктива оптичної системи, n-канальний відеопідсилювач, формувач координат цілей, а також блок сканування, кінематично зв'язаний зі скануючим дзеркалом оптичної системи й підключений до одного із входів формувача координат цілей, що забезпечує визначення кутови х координат теплоконтрастних цілей і їхню видачу в систему індикації для аналізу оператором. Загальним недоліком відомих ТП, включаючи прототип, є низька перешкодозахищеність внаслідок істотного впливу на роботу ТП фонових засвітлень, що приводить до формування відміток "помилкові" цілі або пропущенню реальних цілей що знижує ефективність застосування сполучених із ТП систем літального апарата (ЛА). При створені технічного рішення, що заявляється, вирішувалося завдання підвищення перешкодозахищеності за рахунок компенсації поточних відеосигналів від фонових засвітлень приймача випромінювання, що надходять від ділянок, що послідовно переглядають усі поля огляду ТП. Поставлене завдання вирішене за рахунок того, що у відомому оптико-електронному теплопеленгаторі, який включає послідовно з'єднані оптичну схему, яка містить оптично сполучені скануючі дзеркало, об'єктив і оптичний модулятор, а також n-канальний фотоприйомний блок, виконаний у вигляді n-елементного приймача випромінювання, розташованого у фокальній площині об'єктива оптичної системи, n-канальний відеопідсилювач, формувач координат цілей, а також блок сканування, кінематично зв'язаний зі скануючим дзеркалом оптичної системи й підключений до одного із входів формувача координат цілей, виконаного з можливістю програмування, для забезпечення визначення кутових координат теплоконтрастних цілей, і з'єднаного із системою індикації, що формує зображення теплоконтрастних цілей для аналізу оператором, у кожний n-каналів схеми обробки відеосигналів додатково введений блок формування змінної складової відеосигналу, блоки обробки позитивних і негативних відеосигналів і селектор відеосигналів, при цьому вхід кожного j Yi = j Yоос + dj Yji , де cos jZоос j Y( Z)ост - кути орієнтації блока сканування на момент надходження від і-ої цілі; dj Yji - кутова неузгодженість j-ого фотоприймача відносно центра фотоприймального пристрою. 5 80041 блоку формування змінної складової відеосигналу підключений до відповідного виходу n-канального відеопідсилювача, а вихід паралельно підключений до входів блоків обробки позитивних і негативних відеосигналів, виходи яких підключені до першого й другого входів відповідного селектора сигналів, а виходи кожного з n-селекторів сигналів підключені до відповідного входу програмувального блоку формування координат теплоконтрастних цілей. Крім того в оптико-електронному теплопеленгаторі блок формування змінної складової відеосигналу складається з послідовно з'єднаних інвертора, лінії затримки, суматора й підсилювача, при цьому, вхід блоку формування змінної складової відеосигналу є входом інвертора й першим входом суматора, а виходом - вихід підсилювача, причому, час затримки сигналу лінією затримки відповідає тривалості відеосигналу, який зареєстровано від віддаленої цілі й визначається співвідношенням: 2b tmin = , де ц wck 2b - кутовий розмір миттєвого поля зору пристрою; wсk - кутова швидкість сканування. Крім того, в оптико-електронному теплопеленгаторі блок обробки позитивних відеосигналів складається з послідовно з'єднаних випрямляча позитивного сигналу, блоку формування середнього рівня, порогової схеми позитивного сигналу, а також мультивібратора, вихід випрямляча позитивного сигналу паралельно підключений до другого входу порогової схеми позитивного сигналу, при цьому входом блоку є вхід випрямляча позитивного сигналу, а ви ходом - вихід мультивібратора, причому тривалість імпульсів, сформованих мультивібратором визначається співвідношенням: DLmax × 180 с tМ = tmax + tmin , де tmax = ц ц ц Dmin × wck × p обн DLmax - максимальний спостережуваний ліc нійний розмір об'єкта випромінювання при мінімальній дальності його виявлення Dmin . обн Крім того, в оптико-електронному теплопеленгаторі блок обробки негативних відеосигналів складається з послідовно з'єднаних випрямляча негативного сигналу, порогової схеми негативного сигналу й інвертора, вихід випрямляча негативного сигналу паралельно підключений до другого входу порогової схеми негативного сигналу, при цьому входом блоку є вхід випрямляча негативного сигналу, а ви ходом - вихід інвертора. Крім того, в оптико-електронному пеленгаторі програмувальний формувач координат теплоконтрастних цілей виконаний у вигляді мікропроцесора запрограмованого з можливістю реалізації алгори 6 тму визначення координат теплоконтрастних цілей за співвідношеннями: jZi=jZост dj Yji j Yi = j Y ост + , де cos jY ост jY(Z)ост - кути орієнтації блоку сканування на момент надходження від і-ої цілі; dj Yji - кутова неузгодженість j-ого фотоприймача щодо центра фотоприйомного пристрою. Таким чином, поставлена перед авторами винаходу задача, що заявляється, вирішена шляхом амплітудно-тимчасової селекції поточних відеосигналів у напрямку сканування, основаного на придушенні (компенсації) відеосигналів від протяжних об'єктів, виділенні й забезпечені пропущення відеосигналів від теплоконтрастних об'єктів, що мають кутові розміри, тобто в забезпеченні пропущення відеосигналів від цілей. Селекція полягає в перетворенні променевого потоку, що поступає в ТП, у відеосигнали, формуванні їхньої змінної складової при інвертуванні, потім затримки відеосигналу на час, що відповідає тривалості відеосигналу, який може бути отриманий від самої віддаленої цілі, підсумовані отриманого інвертованого відеосигналу з поточним вхідним відеосигналом і посиленні сигналів, що залишилися. Потім отриманий сумарний сигнал обробляють по двох каналах, причому в першому каналі перетворюють позитивні відеосигнали, нормують по тривалості, причому, тривалість кожного формованого сигналу відповідає сумарній теоретичній тривалості відеосигналів від самої цілі й цілі, розташованої на мінімально припустимій дальності. У другому каналі перетворюють негативні відеосигнали, для чого із вхідних сигналів, що приходять виділяють негативні сигнали й інвертують їх. Після цього здійснюють тимчасову селекцію сформованих поточних імпульсів у першому й другому каналі обробки інформації. Для чого у відомий ТП (див. прототип), що складається із блоку сканування БС, nканального фотоприймача ФП, n-канального відеопідсилювача ВУС, формувача координат цілі ФКЦ, і в якому БС оптично сполучений із ФП, а його перший, другий і третій виходи електрично підключені, відповідно, до (n+1), (n+2) і (n+3) входам ФКЦ; кожний з n-виходів ФП з'єднаний с відповідної n-им входом ВУС. У кожний з n каналів обробки відеосигналів додатково введений формувач змінної складової відеосигналу ФПСn, блок обробки позитивних БОПn і негативних відеосигналів БООn, а також селектор ССn, при цьому вхід кожного із ФПСn підключений до відповідного виходу ВУС, а вихід паралельно підключений до входу БОПn і БООn, ви ходи яких підключені, відповідно, до першого й другого входу ССn, а вихід кожного зі ССn у свою чергу, підключений до відповідного n-ого входу ФКЦ. Відомі ТП мають низьку перешкодозахищеність внаслідок істотного впливу на їхню роботу фонових засвітлень. Раніше згаданий оптичний модулятор не дозволяє знизити фонові засвітлення до необхідного рівня (див. аналог 2, стор.161), а 7 80041 разом з тим, приводить до втрати до 50% енергії випромінювання при модуляції, внаслідок наявності непрозорих секторів обертових растрів [див. прототип, стор.234], що істотно знижує дальність виявлення цілей. У запропонованому ТП значно підвищена перешкодозахищеність за рахунок компенсації (вирахування) відеосигналів, які надходять від ділянок поля огляду ТП, що послідовно переглядають й зміщених на t3 min. Розглянемо принцип побудови й роботу ТП, що заявляється. Для цього додаються наступні креслення: На Фіг.1 - представлена блок-схема оптикоелектронного теплопеленгатора, що заявляється; На Фіг.2 - формувач змінної складової відеосигналу ФПСn; На Фіг.3 - блок обробки позитивних відеосигналів БОПn; На Фіг.4 - блок обробки негативних відеосигналів БООn; На Фіг.5 - тимчасові діаграми амплітуднотимчасової селекції поточних відеосигналів. ТП (Фіг.1), що заявляється, містить блок сканування БС(1) n-канальний фотоприймач ФП(2), nканальний відеопідсилювач ВУС(3), формувач координат цілей ФКЦ(4), крім того, у кожний з nканалів обробки відеосигналів уведений формувач змінної складової відеосигналу ФПСn(5), обробки позитивних відеосигналів БОПn(6) і блок обробки негативних відеосигналів БООn(7), селектор сигналів ССn(8). При цьому оптичним входом ТП є оптичний вхід БС(1), а виходом m-виходів ФКЦ(4) m=2n*k, де k - загальна можлива кількість цілей, що виявляються, при скануванні МПЗ по куту місця від початку до кінця кадру. ФП(2) оптично сполучений із БС(1), а його 1...n виходи підключені до 1...n входів ВУС(3). Вхід кожного із ФПСn(5) підключений до відповідного 1...n виходів ВУС(3), а ви хід - паралельно підключений до входів БОПn(6) і БООn(7). Перший і другий входи ССn(8) підключені, відповідно, до виходів БОПn(6) і БООn(7), а вихід кожного ССn(8) підключений до відповідного n-ого входу ФКЦ(4), (n+1); (n+2) і (n+3)-і входи якого підключені, відповідно, до першого, другого й третього виходів БС(1). ФП(2) - забезпечує перетворення оптичних сигналів в електричні (відеосигнали) при послідовному скануванні зони огляду ТП МПЗ і є nканальним фотоприймачем. ВУС(3) - відеопідсилювач забезпечує максимальне співвідношення сигналу до шуму. ФКЦ(4) - є мікропроцесором, що запрограмований на рішення завдань по обчисленню координат цілей за співвідношеннями, закладеними у запам'ятовувальному пристрої: jZi=jZост j Yi = j Y ост + dj Yji cos jY ост , де jY(Z)ост - кути орієнтації блоку сканування БС(1) на момент надходження від і-ої цілі; 8 dj Yji - кутова неузгодженість j-ого фотоприймача щодо центра фотоприйомного пристрою ФП(2). ФПСn(5) (Фіг.2) - формувач змінної складової поточних відеосигналів, складається з послідовно включених інвертора И(9), лінії затримки ЛЗ(10), суматора З(11) і підсилювача ВУС(12), при цьому входами блоку ФПСn(5) одночасно є вхід И(9) і перший вхід З(11), а ви ходам - вихід ВУС(12). БОПn(6) (Фіг.3) - блок обробки позитивних сигналів, складається з послідовно включених випрямляча ВПС(13), формувача середнього рівня ФУП(14), порогової схеми позитивного сигналу ПСП(15), а також, що чекає мультивібратора, М(16). Вихід ВПС(13) паралельно підключений до другого входу ПСП(15), при цьому входом блоку БОПn(6) є вхід ВПС(13), а виходом - вихід мультивібратора М(16). БООn(7) (Фіг.4) - блок обробки негативних сигналів змінної складової поточного відеосигналу, складається з послідовно включених випрямляча ВОС(17), порогової схеми негативних сигналів ПСО(18), И(19). При цьому входом блоку БООn(7) є вхід ВОС(17), а ви ходом - вихід інвертора И(19). ССn(8) - селектор сигналів забезпечує тимчасову селекцію імпульсів, що поступають, за рахунок формування сигналів на виході схеми тільки при одночасній присутності сигналів на двох її входа х. Тепловипромінюючі об'єкти й навколишнє середовище утворюють теплове поле. Для виявлення тепловипромінюючих об'єктів за допомогою ТП здійснюють перегляд (сканування) теплового поля блоком сканування БС(1) і подальший його аналіз. БС(1) - формує поточні кути орієнтації поля огляду (jZост - по куту місця, jYос - по азимуту й jZk - по сигналах максимального розвороту блоку сканування БС(1). Таким чином, на 1-му, 2-му і 3-му виходах БС(1) формуються поточні кути орієнтації поля огляду ТП - jZост Γ, jYос і jZ k, що надходять на (n+1); (n+2) і (n+3) входи ФКЦ(4). У ФП(2) - відбувається перетворення поточних оптичних сигналів в електричні, які надходять на відповідні входи ВУС(3), де вони підсилюються до необхідного рівня. Надалі, для підвищення перешкодозахищеності ТП, при складній фоново-цільовій обстановці ФЦО, здійснюється поканальна амплітуднотимчасова селекція поточних відеосигналів у напрямку сканування, що забезпечує придушення (виключення) поточних відеосигналів від фонових засвітлень фотоприймача ФП(2), що надходять від ділянок усього поля огляду ТП, які послідовно переглядаються. При цьому, у кожному каналі обробки відеосигналів здійснюється виділення й пропущення поточних відеосигналів від тепловипромінюючих об'єктів, що мають малі кутові розміри, що відповідають кутовим розмірам цілей, розташованих на розрахунковій мінімальній дальності, їхнього виявлення за допомогою ТП. Тимчасові діаграми, що пояснюють запропоновану амплітудно-тимчасову селекцію відеосигналів у кожному з n-каналів обробки відеосигналів, наведені на Фіг.5: 9 80041 U1 - відеосигнал, що надходить із відеопідсилювача ВУС(3) на вхід ФПСn(5); U2 - проінвертований інвертором И(9) сигнал, що пройшов через лінію затримки ЛЗ(10); U3 - сигнали на виході формувача змінного сигналу ФПСn(5); U4 - сигнал на виході порогової схеми позитивного сигналу ПСП(15) - вході мультивібратора, що чекає, М(16) блоку БОПn(6); U5 - сигнал на виході порогової схеми негативного сигналу ПСО(18) - вході інвертора И(19) блоку БООn(7); U6 - сигнал на виході мультивібратора, що чекає, М(16) тривалість імпульсу якого визначається в такий спосіб: DLmax × 180 с tМ = tmax + tmin , де tmax = ц ц ц Dmin × wck × p обн DLmax - максимальний спостережуваний ліc нійний розмір об'єкта випромінювання при мінімальній дальності його виявлення Dmin . обн U7 - сигнали на виході блоку обробки негативних сигналів змінної складової поточного відеосигналу БООn(7); U8 - сигнали на виході селектора сигналів ССn(8); Селектори сигналів ССn(8) забезпечують тимчасову селекцію імпульсів, які поступають, що полягає в пропущенні відеосигналів U8 на виході тільки при одночасній наявності на вході сигналів U6 і U7. Таким чином, сигнал U8, у загальному випадку, містить як імпульси від передніх фронтів відеосигналів від точкових цілей, так і від задніх фронтів відеосигналів від найближчих цілей. Тобто, у кожному з n-каналів обробки відеосигналів здійснюється амплітудно-тимчасова селекція поточних відеосигналів у напрямку сканування, у результаті 10 якої забезпечується пропущення на входи ФКЦ(4) відеосигналів від об'єктів (цілей), що мають малі кутові розміри в порівнянні з кутовими розмірами об'єктів фону (хмарності). Надалі ФКЦ(4) формує координати виявлених i-их цілей за співвідношеннями: jZi=jZост j Yi = j Y ост + dj Yji cos jY ост , де jY(Z)ост - кути орієнтації БС(1) на момент надходження відеосигналу від і-ої цілі; dj Yji - кутова неузгодженість одиночної комірки фотоприймача щодо його центра. Надалі, сформовані кутові координати цілі, що виявляються, надходять на вхід системи індикації для аналізу поточної інформації оператором. При цьому, у поточній інформації значно знижена, у порівнянні із прототипом, імовірність формування "помилкових" оцінок або пропуску цілей за рахунок компенсації поточних відеосигналів від фонових засвітлень фотоприймача випромінюванням, що надходять від ділянок, що переглядаються послідовно, усього поля огляду шляхом амплітуднотимчасової селекції відеосигналів, основаної на придушенні відеосигналів від протяжних об'єктів, виділенні й забезпеченні пропущення сигналів від цілей, що мають малі кутові розміри, у порівнянні з кутовими розмірами об'єктів фону (хмарності), що значно знижує ймовірність формування "помилкових" цілей або пропуску цілей, а також спрощує роботу оператора в складній фоно-цільовій обстановці й, як наслідок, підвищує ефективність застосування сполучених із ТП систем ЛА (літального апарата). При практичній реалізації блок-схема ТП може бути виконана з використанням стандартизованих елементів, сформованих у блоки за відомими у техніці принципами. 11 Комп’ютерна в ерстка О. Гапоненко 80041 Підписне 12 Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюOptoelectronic heat direction finder
Автори англійськоюBuzanov Viktor Ivanovych, Cherniak Serhii Ivanovych
Назва патенту російськоюОптико-электронный теплопеленгатор
Автори російськоюБузанов Виктор Иванович, Черняк Сергей Иванович
МПК / Мітки
МПК: G01S 3/78
Мітки: оптико-електронний, теплопеленгатор
Код посилання
<a href="https://ua.patents.su/6-80041-optiko-elektronnijj-teplopelengator.html" target="_blank" rel="follow" title="База патентів України">Оптико-електронний теплопеленгатор</a>
Оптико-електронний сенсор
Номер патенту: 23902
Опубліковано: 11.06.2007
Автори: Білинський Йосип Йосипович, Білинський Володимир Йосипович
МПК: G01J 3/28
Мітки: оптико-електронний, сенсор
Формула / Реферат:
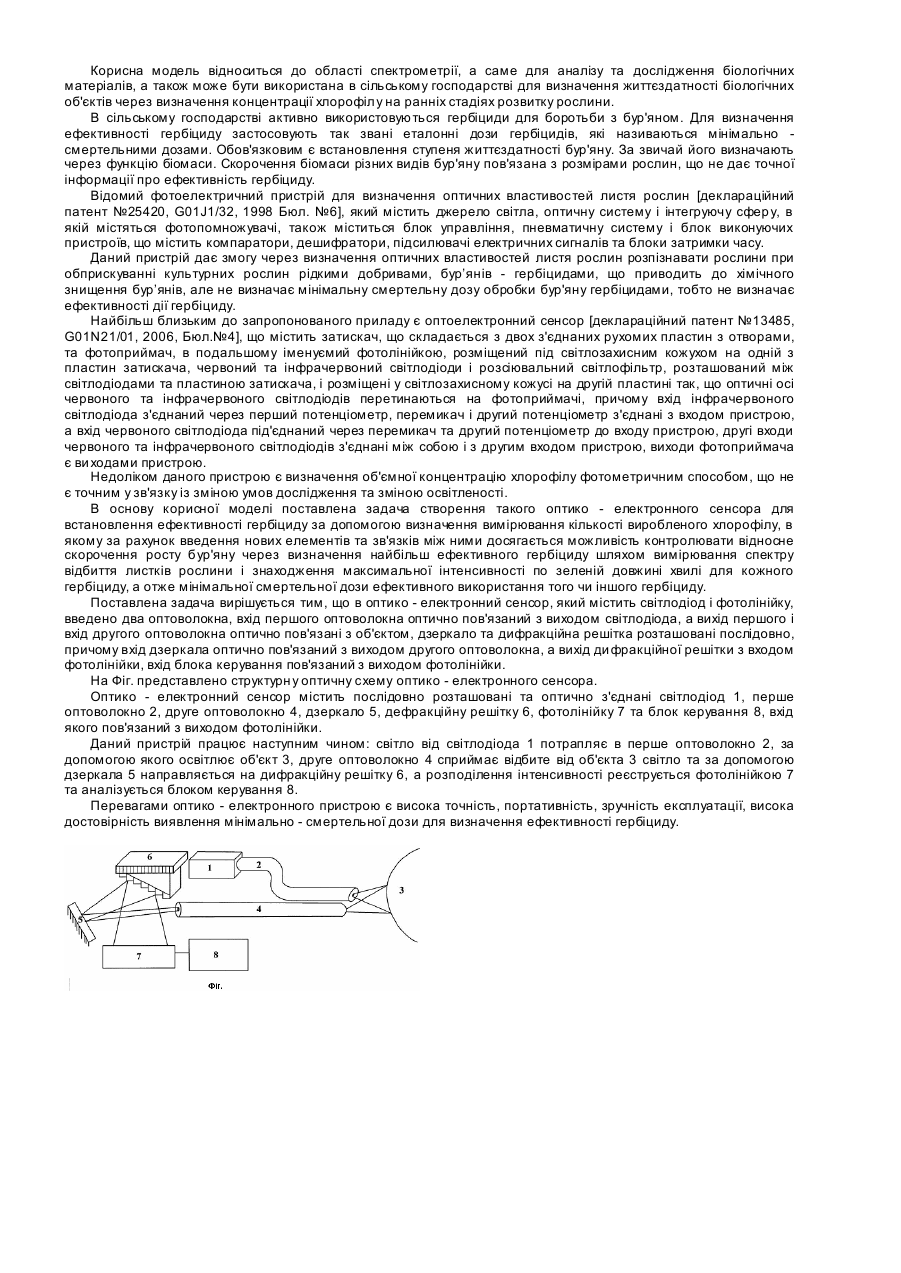
Оптико-електронний сенсор, що містить світлодіод і фотолінійку, який відрізняється тим, що в нього введені два оптоволокна, вхід першого оптоволокна оптично зв'язаний з виходом світлодіода, а вихід першого і вхід другого оптоволокна оптично зв'язані з об'єктом, дзеркало та дифракційна решітка розташовані послідовно, причому вхід дзеркала оптично зв'язаний з виходом другого оптоволокна, а вихід дифракційної решітки - з входом фотолінійки, вхід...
Оптико-електронний вимірювач поверхневого натягу рідин
Номер патенту: 71259
Опубліковано: 15.11.2004
Автори: Білинський Йосип Йосипович, Городецька Оксана Степанівна
МПК: G01N 13/00
Мітки: натягу, оптико-електронний, вимірювач, рідин, поверхневого
Формула / Реферат:
Оптико-електронний вимірювач поверхневого натягу рідин, що містить струминну трубку, ємність для рідини, який відрізняється тим, що в нього введені лазер, лінійний об'єктив, які знаходяться з струминною трубкою на одній осі, що проходить через центр взаємодії газового струменя з досліджуваною рідиною, фотоматрицю чутливих елементів, вхід якої оптично пов'язаний з поверхнею досліджуваної рідини, блок обробки інформації, вхід якого пов'язаний з...
Оптико-електронний пристрій дослідження дна ока
Номер патенту: 15907
Опубліковано: 17.07.2006
Автори: Бабій Артем Олександрович, Салдан Йосип Романович, Білинський Йосип Йосипович
МПК: A61B 3/06
Мітки: пристрій, дна, дослідження, ока, оптико-електронний
Формула / Реферат:
Оптико-електронний пристрій дослідження дна ока, який містить джерело світла, оптичну систему, світловод, який відрізняється тим, що в нього введено фотошар, фотоматрицю, щонайменше чотири світлодіоди, рідинно-кристалічний дисплей, мікропроцесорну систему, блок цифро-аналогових перетворювачів, електронний блок керування, причому вихід фотошару оптично зв'язаний з входом світловоду, вихід світловоду оптично зв'язаний з входом оптичної системи,...
Фазовий оптико-електронний далекомір

Номер патенту: 21631
Опубліковано: 15.03.2007
Автори: Іванченко Іраїда Олександрівна, Сантоній Володимир Іванович, Будіянська Людмила Михайлівна, Янко Володимир Васильович
МПК: G01C 3/08
Мітки: оптико-електронний, фазовий, далекомір
Формула / Реферат:
1. Фазовий оптико-електронний далекомір, що містить блок вимірювання дальності і блок вимірювання різниці фаз, в якому блок вимірювання дальності містить випромінювач, фотоприймач, основний генератор, гетеродин, два підсилювачі потужності, два перемножувачі, два фільтри низької частоти, два підсилювачі-обмежувачі, при цьому вихід основного генератора через підсилювач потужності з’єднаний з випромінювачем, а через перемножувач, фільтр низької...
Оптико-електронний пристрій вимірювання показника заломлення та оптичної густини середовищ
Номер патенту: 19726
Опубліковано: 15.12.2006
Автори: Білинський Йосип Йосипович, Гладишевський Володимир Романович
МПК: G01N 21/41
Мітки: заломлення, вимірювання, пристрій, оптико-електронний, густини, середовищ, показника, оптично
Формула / Реферат:
Оптико-електронний пристрій вимірювання показника заломлення та оптичної густини середовищ, що містить джерело світла, плоский світловод, що має пристрій введення на вільній від контакту з контрольованим середовищем поверхні плоского світловода, який відрізняється тим, що в нього введені об’єктив, вхід якого оптично зв’язаний з виходом джерела світла, пристрій введення, вихід якого оптично зв’язаний з виходом об’єктива, що знаходиться на...
Попередній патент: Спосіб синтезу (2s)-індолін-2-карбонової кислоти і застосування у синтезі периндоприлу
Наступний патент: Композиція харчової добавки для варених ковбасних виробів
Випадковий патент: Контролер машиніста