Система багатофакторного контролю адекватності управління бронетанковою технікою механіком-водієм
Номер патенту: 81477
Опубліковано: 25.06.2013
Автори: Мількович Ігор Богданович, Шабатура Юрій Васильович, Корольов Володимир Миколайович
Формула / Реферат
Система багатофакторного контролю адекватності управління бронетанковою технікою механіком-водієм, що містить електронний блок і засоби реагування та попередження, яка відрізняється тим, що додатково введено давачі тиску, які розміщуються на незалежних органах ручного управління та органах ножного управління, давачі для визначення частоти пульсу та зміни шкірно-гальванічної реакції, що розміщуються у шлемофоні, давач сигналу наявності руху бронетанкової техніки, лінію передачі сповіщення по внутрішній мережі командиру екіпажу про зниження рівня адекватного управління механіком-водієм, управляючу лінію для подання командиром екіпажу команди зупинки руху.
Текст
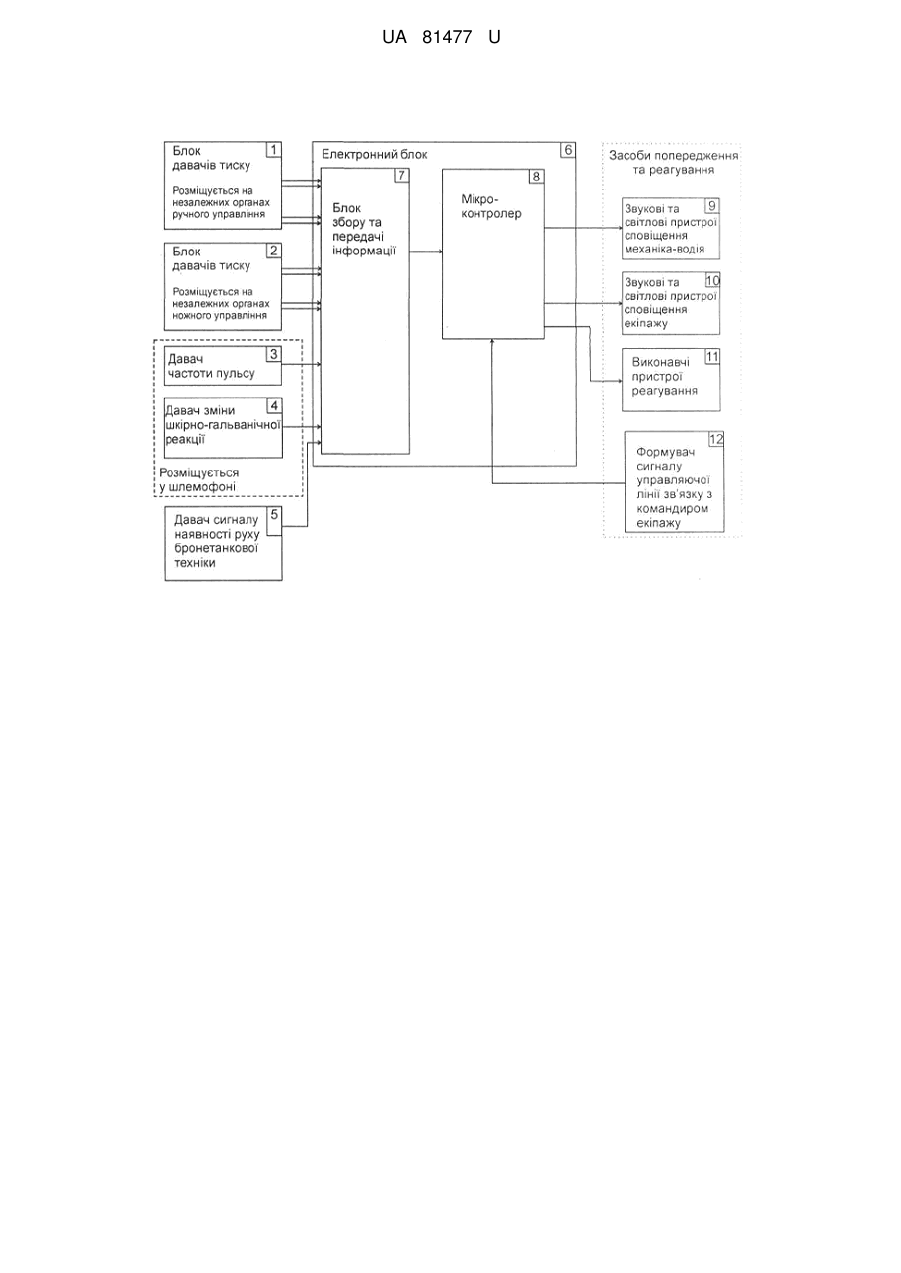
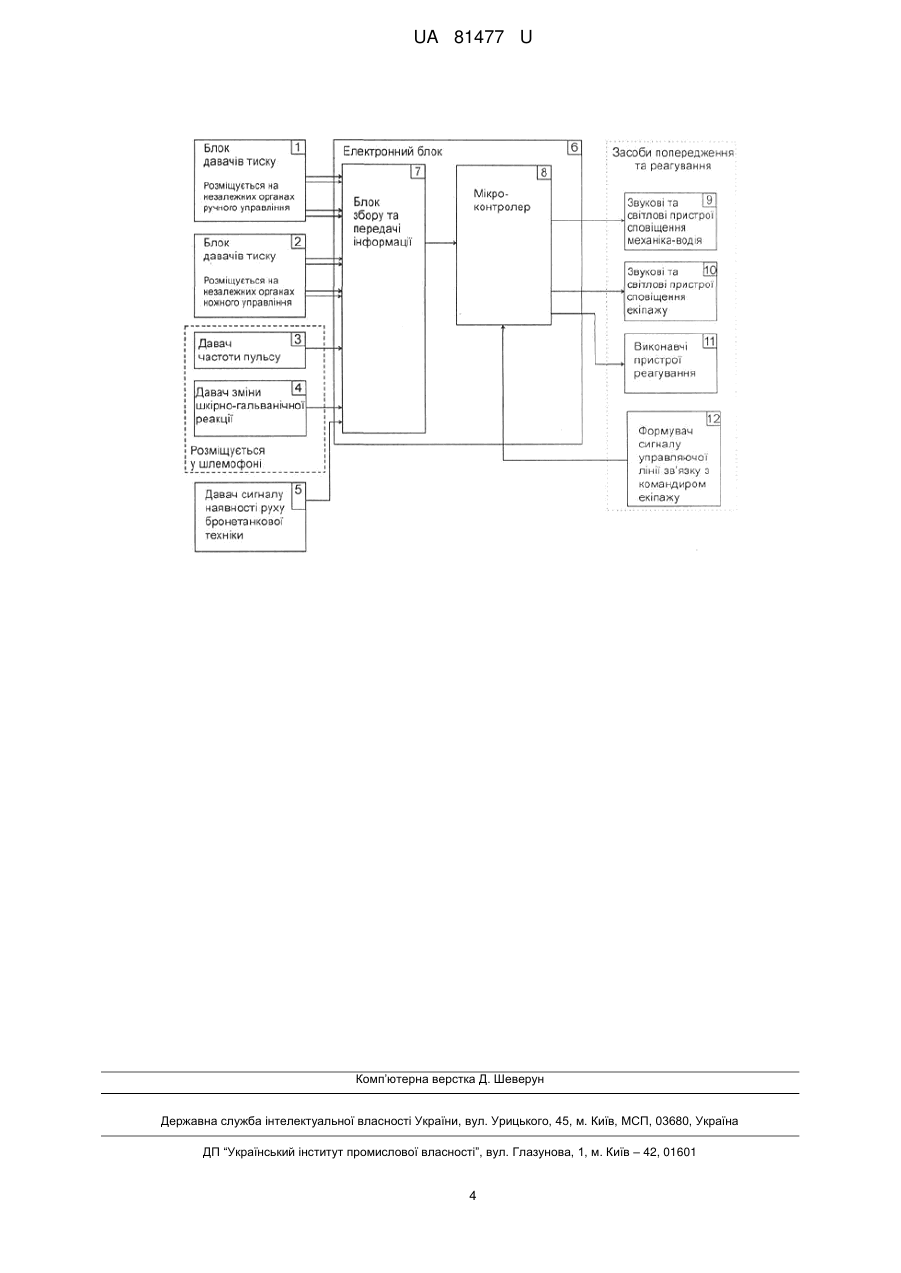
Реферат: Система багатофакторного контролю адекватності управління бронетанковою технікою механіком-водієм містить електронний блок і засоби реагування та попередження. Додатково введено давачі тиску, які розміщуються на незалежних органах ручного управління та органах ножного управління, давачі для визначення частоти пульсу та зміни шкірно-гальванічної реакції, що розміщуються у шлемофоні. Також введено давач сигналу наявності руху бронетанкової техніки, лінію передачі сповіщення по внутрішній мережі командиру екіпажу про зниження рівня адекватного управління механіком-водієм, управляючу лінію для подання командиром екіпажу команди зупинки руху. UA 81477 U (12) UA 81477 U UA 81477 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до засобів, призначених для підвищення безпеки під час руху бронетанкової техніки, та інформування командира екіпажу про відсутність адекватної реакції з боку механіка-водія на зміну дорожньої ситуації в процесі управління бронетанковою технікою. Система за цією корисною моделлю може бути застосована для встановлення як на існуючих модифікаціях бронетанкової техніки, так і на тих, що ще тільки проектуються, а також, у спрощеному вигляді, для застосування у цивільній техніці. Відомий пристрій контролю бадьорості водія транспортного засобу [патент РФ № 2282543 8 МПК В60К 28/06, опубл. 27.08.2006]. що базується на оцінці зміни шкірно-гальванічної реакції. Пристрій для реалізації цього способу містить електроди з можливістю розміщення па зап'ястку або на пальці водія із засобами їх кріплення. Даний метод мас ряд суттєвих недоліків: необхідність розміщення електродів на зап'ястку або на пальці водія із засобами їх кріплення, що створюють додаткові незручності водієві; велика кількість ситуацій, при яких змінюється шкірно-гальванічна реакція, що часто може привести до хибної тривоги. Крім цього в результаті експериментів встановлено, що у деяких людей сигнал на зап'ястку пропадає з невідомих причин при їх цілком працездатному психофізіологічному стані, що викликає в системі хибні тривоги. Але при цьому на пальцях сигнал шкірно-гальванічної реакції зберігається. У інших людей спостерігається зворотна ситуація: зберігається сигнал на зап'ястку при зникненні його на пальцях. Відомий пристрій контролю працездатності водія транспортного засобу [патент РФ № 6 2111133 МПК В60К 28/06, опубл. 20.05.1998], що базується на реєстрації частоти пульсації серця. Цей підхід потребує прикріплення давача до мочки вуха та подає сигнал на головний телефон. Основними недоліками цього пристрою є: необхідність розміщення давача на тілі водія із засобами його кріплення, що створює додаткові незручності водієві; використання величини значения пульсу у якості критерію стану серцевої діяльності має малу діагностичну значимість і також може привести до явища хибної тривоги, оскільки цей показник є досить варіативним. Найбільш близьким по сукупності технічних ознак до системи, що заявляється, є "Пристрій для контролю за рівнем активності водія в керуванні механічним транспортним засобом" [патент 7 України № 43615 МПК В60К 28/06, опубл. 17.12.2001], що використовує як критерій працездатності аналіз в часі стискування водієм рульового колеса. Цей пристрій базується на вимірюванні та аналізі в часі тиску пальців рук водія на рульове колесо та порівнянні з еталонними значеннями. При значних відмінностях стилю управління від еталонного створюються умови для подання попереджувального сигналу. Але такий пристрій має ряд недоліків, а саме: контроль стану водія опираючись тільки на один параметр аналіз в часі тиску пальців рук водія на рульове колесо, відсутність контролю органів ножного управління, не врахована специфіка використання військової техніки, не врахована можливість різкої зміни управляючих рухів механіка-водія у бойових ситуаціях, відсутність інформаційної та виконавчої ліній зв'язку з командиром екіпажу. В основу корисної моделі поставлено задачу розробити систему багатофакторного контролю адекватності управління бронетанковою технікою механіком-водієм для контролю за рівнем адекватності поведінки механіка-водія під час управління бронетанковою технікою, в якій за рахунок введення додаткових давачів тиску, які розміщуються на незалежних органах ручного управління (важелі, штурвал, тощо) та органах ножного управління, давачів для визначення частоти пульсу та зміни шкірно-гальванічної реакції, що розміщуються у шлемофоні, давача сигналу наявності руху бронетанкової техніки, лінії передачі сповіщення по внутрішній мережі командиру екіпажу про зниження рівня адекватного управління механіком-водієм, управляючої лінії для подання командиром екіпажу команди зупинки руху. вирішується задача завчасного визначення зниження рівня адекватності поведінки механіка-водія під час управління бронетанковою технікою. Поставлена задача вирішується тим, що система містить датчики тиску, електронний блок і засоби попередження та реагування, згідно з корисною моделлю, додатково введено давачі тиску, які розміщуються на незалежних органах ручного управління (важелі, в тому числі на важелі перемикання передач, штурвал) та органах ножного управління, давачі для визначення частоти пульсу та зміни шкірно-гальванічної реакції, що розміщуються у шлемофоні, давач сигналу наявності руху бронетанкової техніки, лінію передачі сповіщення по внутрішній мережі 1 UA 81477 U 5 10 15 20 25 30 35 40 45 50 55 командиру екіпажу про зниження рівня адекватного управління механіком-водієм, управляючу лінію для подання командиром екіпажу команди зупинки руху, а електронний блок складається з блока збору та передачі інформації та мікроконтролера. Причому входи блока збору та передачі інформації з'єднані з блоками давачів тиску, давачами для визначення частоти пульсу та зміни шкірно-гальванічної реакції та давачем сигналу руху, а виходи з цього блока з'єднані з входом мікроконтролера, вихід формувача сигналу управляючої лінії зв'язку з командиром екіпажу з'єднаний з входом мікроконтролера, виходи останнього з'єднані з засобами попередження та реагування. Представлена структурна схема системи контролю адекватності управління бронетанковою технікою механіком-водієм. Система складається з блока давачів тиску 1, котрі розміщено па незалежних органах ручного управління (важелі, в тому числі на важелі перемикання передач, штурвал), блока давачів тиску 2, котрі розміщено на органах ножного управління, давачів для визначення частоти пульсу 3 та зміни шкірно-гальванічної реакції 4, що вмонтовуються у шлемофоні. давача сигналу наявності руху бронетанкової техніки 5, електронного блока 6, який складається з блока збору та передачі інформації 7 та мікроконтролера 8, звукових та світлових пристроїв сповіщення механіка-водія 9, звукових та світлових пристроїв сповіщення членів екіпажу 10, призначених для інформування членів екіпажу про зниження рівня адекватного управління бронетанковою технікою механіком-водієм, виконавчих пристроїв реагування 11 та формувача сигналу управляючої лінії зв'язку з командиром екіпажу 12, призначеного для формування управляючого сигналу про необхідність вмикання виконавчих пристроїв реагування. Запропонована система контролює положення рук механіка-водія на органах управління шляхом вимірювання тиску, спричиненого пальцями рук на один або декілька давачів з блоків давачів тиску 1, 2, розташованих в декоративних чохлах (котрі одягаються на органи управління бронетанковою технікою), тривалість інтервалів серцевого ритму механіка-водія, завдяки давачу сигналу частоти пульсу 3, який вмонтовано у шлемофоні, та відслідковує зміну шкірногальванічної реакції завдяки вмонтованому у шлемофоні давачу 4. Під час руху, незалежно від рельєфу місцевості, механік-водій вимушений постійно корегувати напрямок руху. При цьому пальці рук створюють зусилля на органі/органах управління бронетанковою технікою (штурвалі, важелях чи кермі), котре сприймається одним або декількома давачами тиску. При цьому при застосуванні достатньо чутливих сенсорів тиску, які розміщені в чохлах, що одягаються на рульове колесо/штурвал/важелі повороту і, додатково, на важіль перемикання передач, та ефективної системи фільтрації, стає можливим визначення значені, тривалості інтервалів серцевого ритму водія [Шабатура Ю.В. Технологія вимірювання па основі представлення значень вимірюваних величин часовими інтервалами: монографія/ Юрій Васильович Шабатура. - Вінниця: ВНТУ, 2010]. Кожен з механіків-водіїв мас свій стиль управління бронетанковою технікою. Крім цього на частоту та силу прикладених до органів управління бронетанковою технікою зусиль впливає рельєф місцевості (рух по бездоріжжю, по ґрунтовій дорозі, по шосе, інше). Завдяки використанню спеціального програмною забезпечення, система контролю адекватності управління бронетанковою технікою механіком-водієм має крім основного робочого режиму "контроль", додатковий режим "навчання", суть якого зводиться до того, що протягом певного періоду часу система "вивчає" особливості стилю водіння конкретного механіка-водія. Для забезпечення можливості ідентифікації механіка-водія, закріпленого за даною технічною одиницею, та рельєфу місцевості, до початку штатної роботи приладу необхідно провести навчальні заїзди, для чого необхідно перевести систему контролю адекватності управління бронетанковою технікою механіком-водієм в "навчальний". Перед цим механікуводію необхідно відпочити для того, щоб під час навчального заїзду він почувався "свіжим". Навчання проводиться окремо для кожного типу рельєфу місцевості та інших характеристик штатних трас та дорожніх ситуацій протягом визначеного часу. Процедура адаптації системи контролю адекватності управління бронетанковою технікою механіком-водієм повторюється для кожного із механіків-водіїв, що закріплені заданою бронетанковою технікою. Система контролю адекватності управління бронетанковою технікою механіком-водієм повинна запам'ятовувати реакції оператора на відповідні умови водіння як "еталон". Алгоритм адаптації повинен враховувати умови руху (рух на автостраді, рух по бездоріжжю і т.д.) і особливості психомоторної динаміки управління конкретним водієм. У режимі навчання система створює базу нечітких множин варіацій зміни інформаційних сигналів, характерних для високої зосередженості і нормального стилю управління бронетанковою технікою конкретним водієм в типових дорожніх ситуаціях. 60 2 UA 81477 U 5 10 15 20 25 30 35 40 45 50 Система вмикається разом з увімкненням бортової мережі бронетанкової техніки та починає опрацьовувати вхідні сигнали після активації давача сигналу наявності руху 5. Інформація з блоків давачів тиску 1 та 2, частоти пульсу 3 і зміни шкірно-гальванічної реакції 4 надходить на блок збору та передачі інформації 7. Отримані таким чином дані передаються до мікроконтролера 8. В режимі контролю система на основі використання методів математичної статистики та нечіткого аналізу поточної інформації про динаміку зміни інтервалів, значень та напрямків зміни імпульсів тиску, частоти пульсу та зміни шкірно-гальванічної реакції, аналізу та порівняння з даними, отриманими в процесі "навчання", дозволяє завчасно визначити зниження рівня уваги механіка-водія до процесу управління бронетанковою технікою. Функціонування системи відбувається у нечіткому середовищі, тобто вона повинна коректно виконувати свої функції в умовах суттєвих невизначеностей, пов'язаних з обмеженістю інформації про особу водія, його поведінку, нечіткість зв'язків вимірюваних параметрів з задачами і цілями контролю, а також певною невизначеністю обмежень, з врахуванням відзначених особливостей система повинна послідовно вирішувати: - задачу ідентифікації механіка-водія; - задачу ідентифікації стану механіка-водія; - задачу ідентифікації типу дорожньої ситуації; - задачу ідентифікації рівня зосередженості механіка-водія на управлінні бронетанковою технікою; - задачу прийняття рішення про вид реакції системи в поточній ситуації. При визначенні певних ситуацій система передбачає ініціювання подачі відповідних звукових та світлових сигналів попередження, а якщо вони не викликають відповідної реакції механіка-водія, то командир екіпажу може прийняти рішення - вжити більш радикальні заходи, аж до вимкнення двигуна і термінового гальмування. Моніторинг динаміки керування бронетанковою технікою конкретним механіком-водієм здійснюється в режимі реального часу. Отримана та опрацьована таким чином інформація дозволяє зробити висновок про адекватність механіка-водія під час керування бронетанковою технікою. У випадку зниження сили та частоти дії на тензодатчики, котра спричинена пальцями рук на органи управління бронетанковою технікою, тривалого періоду управління однією рукою, що перевищує допустимі межі необхідні для перемикання передач чи інших дій, а також залежно від стану додаткових давачів з блоків 2, 3, 4 - мікроконтролер, використовуючи методи нечіткої логіки та математичної статистики, прийме рішення про зниження чи відсутність адекватності поведінки механіка-водія. У цьому випадку буде подано сигнал па звукові та світлові пристрої сповіщення 9, а при відсутності реагування зі сторони механіка-водія подається сигнал на звукові та світлові пристрої сповіщення членів екіпажу 10 для прийняття подальшого рішення. У випадку повної відсутності реакції зі сторони механіка-водія на виклики в результаті втрати свідомості механіком-водієм, командир екіпажу може прийняти рішення про зупинку бронетанкової техніки шляхом дії на формувач сигналу управляючої лінії зв'язку з командиром екіпажу 12 для подачі команди мікроконтролеру 8 необхідність вмикання виконавчих пристроїв реагування 11. Використання вищеописаної системи контролю адекватності управління бронетанковою технікою забезпечить підвищення рівня безпеки, попередження аварійних ситуацій та збереження технічних одиниць, а також забезпечить інформування командира екіпажу про відсутність адекватної реакції зі сторони механіка-водія. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Система багатофакторного контролю адекватності управління бронетанковою технікою механіком-водієм, що містить електронний блок і засоби реагування та попередження, яка відрізняється тим, що додатково введено давачі тиску, які розміщуються на незалежних органах ручного управління та органах ножного управління, давачі для визначення частоти пульсу та зміни шкірно-гальванічної реакції, що розміщуються у шлемофоні, давач сигналу наявності руху бронетанкової техніки, лінію передачі сповіщення по внутрішній мережі командиру екіпажу про зниження рівня адекватного управління механіком-водієм, управляючу лінію для подання командиром екіпажу команди зупинки руху. 3 UA 81477 U Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюMultivariable control system of adequacy of driving armored vehicle by driver
Автори англійськоюMilkovych Ihor Bohdanovych, Shabatura Yurii Vasyliovych, Koroliov Volodymyr Mykolaiovych
Назва патенту російськоюСистема многофакторного контроля адекватности управления бронетанковой техникой механиком-водителем
Автори російськоюМилькович Игорь Богданович, Шабатура Юрий Васильевич, Королев Владимир Николаевич
МПК / Мітки
МПК: B60K 28/00
Мітки: контролю, технікою, управління, механіком-водієм, бронетанковою, багатофакторного, система, адекватності
Код посилання
<a href="https://ua.patents.su/6-81477-sistema-bagatofaktornogo-kontrolyu-adekvatnosti-upravlinnya-bronetankovoyu-tekhnikoyu-mekhanikom-vodiehm.html" target="_blank" rel="follow" title="База патентів України">Система багатофакторного контролю адекватності управління бронетанковою технікою механіком-водієм</a>
Система для автоматизованого контролю дотримання водієм автомобіля правил дорожнього руху

Номер патенту: 88999
Опубліковано: 10.12.2009
Автори: Дохов Олександр Іванович, Лук'янова Ольга Олексіївна, Грінченко Олена Володимирівна, Лук'янов Олександр Михайлович
МПК: G01C 21/26, G08G 1/052, G08G 1/056
Мітки: правил, дотримання, автомобіля, водієм, руху, контролю, автоматизованого, система, дорожнього
Формула / Реферат:
Система для автоматизованого контролю дотримання водієм автомобіля правил дорожнього руху, до складу якої входить багатофункціональна автомобільна бортова апаратура, що включає в себе GNSS-приймач, запам'ятовуючий блок і блок електроживлення, яка відрізняється тим, що до її складу входять також центр збору і обробки інформації, мережа центрів поширення інформації і переносні апаратно-програмні модулі, а багатофункціональна автомобільна...
Система для автоматизованого контролю дотримання водієм автомобіля правил дорожнього руху та визначення факту виникнення дорожньо-транспортної пригоди
Номер патенту: 91792
Опубліковано: 25.08.2010
Автори: Лук'янова Ольга Олексіївна, Грінченко Олена Володимирівна, Дохов Олександр Іванович, Лук'янов Олександр Михайлович, Сітенко Олександр Миколайович
МПК: G08G 1/056, G01C 21/26, G08G 1/052
Мітки: факту, дотримання, дорожнього, визначення, руху, автоматизованого, контролю, водієм, виникнення, правил, дорожньо-транспортної, автомобіля, пригоди, система
Формула / Реферат:
Система для автоматизованого контролю дотримання водієм автомобіля правил дорожнього руху та визначення факту виникнення дорожньо-транспортної пригоди, до складу якої входить багатофункціональна автомобільна бортова апаратура, що включає в себе GPS/GNSS-приймач, запам'ятовуючий блок і блок електроживлення, яка відрізняється тим, що до її складу входять також центр збору і обробки інформації, мережа центрів поширення інформації і переносні...
Модульна система “старт” для контролю та управління електромагнітними реле
Номер патенту: 66314
Опубліковано: 26.12.2011
Автор: Бодня Євген Володимирович
МПК: B61L 21/00
Мітки: управління, старт, електромагнітними, система, контролю, модульна, реле
Формула / Реферат:
1. Модульна система для контролю та управління електромагнітними реле, яка відрізняється тим, що складається з крейту вводу/виводу 6U16, що виконаний зі стандартних алюмінієвих профілів і двох об'єднувальних панелей, має 16 посадочних місць для модулів, 32 роз'єми для підключення до контактів або обмоток електромагнітних реле, два CAN інтерфейси для підключення до комп'ютера, та складається не більш як з 16 модулів, що встановлюються в...
Система управління і контролю електрообладнання пасажирського вагона
Номер патенту: 57781
Опубліковано: 10.03.2011
Автор: Надточій Сергій Володимирович
МПК: H02B 15/00, B61K 13/00
Мітки: електрообладнання, вагона, управління, система, пасажирського, контролю
Формула / Реферат:
1. Система управління і контролю електрообладнання пасажирського вагона, що включає щонайменше одну процесорну шафу управління, на яку виведені пристрій введення команд і пристрій контролю стану електрообладнання, та яка також містить пристрій обробки даних і пристрій перетворення та узгодження команд, яка відрізняється тим, що пристрій введення команд і пристрій виводу інформації виконані у вигляді єдиної панелі оператора із сенсорним...
Мобільна автоматизована система управління та контролю доступу “miraclesoft” (“мобільна асукд”)
Номер патенту: 41349
Опубліковано: 12.05.2009
Автор: Козін Андрій Валерійович
МПК: E05B 19/00
Мітки: мобільна, управління, автоматизована, доступу, асукд, система, miraclesoft, контролю
Формула / Реферат:
1. Мобільна автоматизована система управління та контролю доступу, що включає електронно-механічний блок, якийуправляється електронним сигналом (ключем) і оснащений джерелом постійної напруги, яка відрізняється тим, що електронно-механічний блок через прилад перетворення вихідного сигналу з аудіовиходу мобільного телефону в керуючий сигнал електронно-механічного блока з'єднаний провідниками з приймаючим GSM-пристроєм, оснащеним джерелом...
Попередній патент: Автономна електростанція км-3
Випадковий патент: Актиномікозний засіб