Система для автоматизованого контролю дотримання водієм автомобіля правил дорожнього руху та визначення факту виникнення дорожньо-транспортної пригоди
Номер патенту: 91792
Опубліковано: 25.08.2010
Автори: Лук'янов Олександр Михайлович, Грінченко Олена Володимирівна, Дохов Олександр Іванович, Лук'янова Ольга Олексіївна, Сітенко Олександр Миколайович

Формула / Реферат
Система для автоматизованого контролю дотримання водієм автомобіля правил дорожнього руху та визначення факту виникнення дорожньо-транспортної пригоди, до складу якої входить багатофункціональна автомобільна бортова апаратура, що включає в себе GPS/GNSS-приймач, запам'ятовуючий блок і блок електроживлення, яка відрізняється тим, що до її складу входять також центр збору і обробки інформації, мережа центрів поширення інформації і переносні апаратно-програмні модулі, а багатофункціональна автомобільна бортова апаратура додатково включає в себе блок розподілу потоків даних, блок обчислення параметрів руху, блок контролю параметрів руху, блок формування критеріїв аналізу, приймальний пристрій, блок тимчасового зберігання інформації, блок керування, блок формування повідомлення про ДТП, передавальний пристрій, блок індикації факту порушення правил руху, блок додаткового контролю і блок індикації факту виникнення ДТП, і при цьому кожен вихід центру збору і обробки інформації з'єднаний із входом одного з центрів поширення інформації, кожен центр поширення інформації передає дані багатофункціональній автомобільній бортовій апаратурі, у якій ці дані надходять на вхід приймального пристрою, вихід якого з'єднаний з першим входом блока формування критеріїв аналізу, другий вхід і перший вихід якого з'єднані з першими виходом і входом блока контролю параметрів руху, а вихід GPS/GNSS-приймача через блок розподілу потоків даних з'єднаний з першим входом блока тимчасового зберігання інформації і входом блока обчислення параметрів руху, перший вихід якого з'єднаний з другим входом блока контролю параметрів руху, а другий вихід блока обчислення параметрів руху з'єднаний з другим входом блока тимчасового зберігання інформації, першими входом і виходом блок керування з'єднаний з виходом і третім входом блока тимчасового зберігання інформації, другими виходом і входом блок керування з'єднаний із входом і виходом запам'ятовуючого блока, третіми виходом і входом блок керування з'єднаний з першими входом і виходом блока формування повідомлення про ДТП, четвертими виходом і входом блок керування з'єднаний з третім входом і другим виходом блока формування критеріїв аналізу, п'ятим входом блок керування з'єднаний з другим виходом блока контролю параметрів руху, п'ятим виходом блок керування з'єднаний із входом блока індикації факту порушення правил руху, другими виходом і входом блок формування повідомлення про ДТП з'єднаний із входом і виходом блока додаткового контролю, третій вихід блока формування повідомлення про ДТП з'єднаний із входом блока індикації факту виникнення ДТП, четвертий вихід блока формування повідомлення про ДТП з'єднаний із входом передавального пристрою, який передає інформацію у центр збору і обробки, а шостий вихід блока керування на час передачі даних з'єднується з входом переносного апаратно-програмного модуля, вихід якого також на час передачі даних з'єднується з входом центру збору і обробки інформації, і при цьому блок електроживлення з'єднаний із входами живлення GPS/GNSS-приймача, блока розподілу потоків даних, блока обчислення параметрів руху, блока контролю параметрів руху, блока формування критеріїв аналізу, приймального пристрою, блока керування, блока формування повідомлення про ДТП, передавального пристрою, блока індикації факту порушення правил руху, блока додаткового контролю і блока індикації факту виникнення ДТП.
Текст
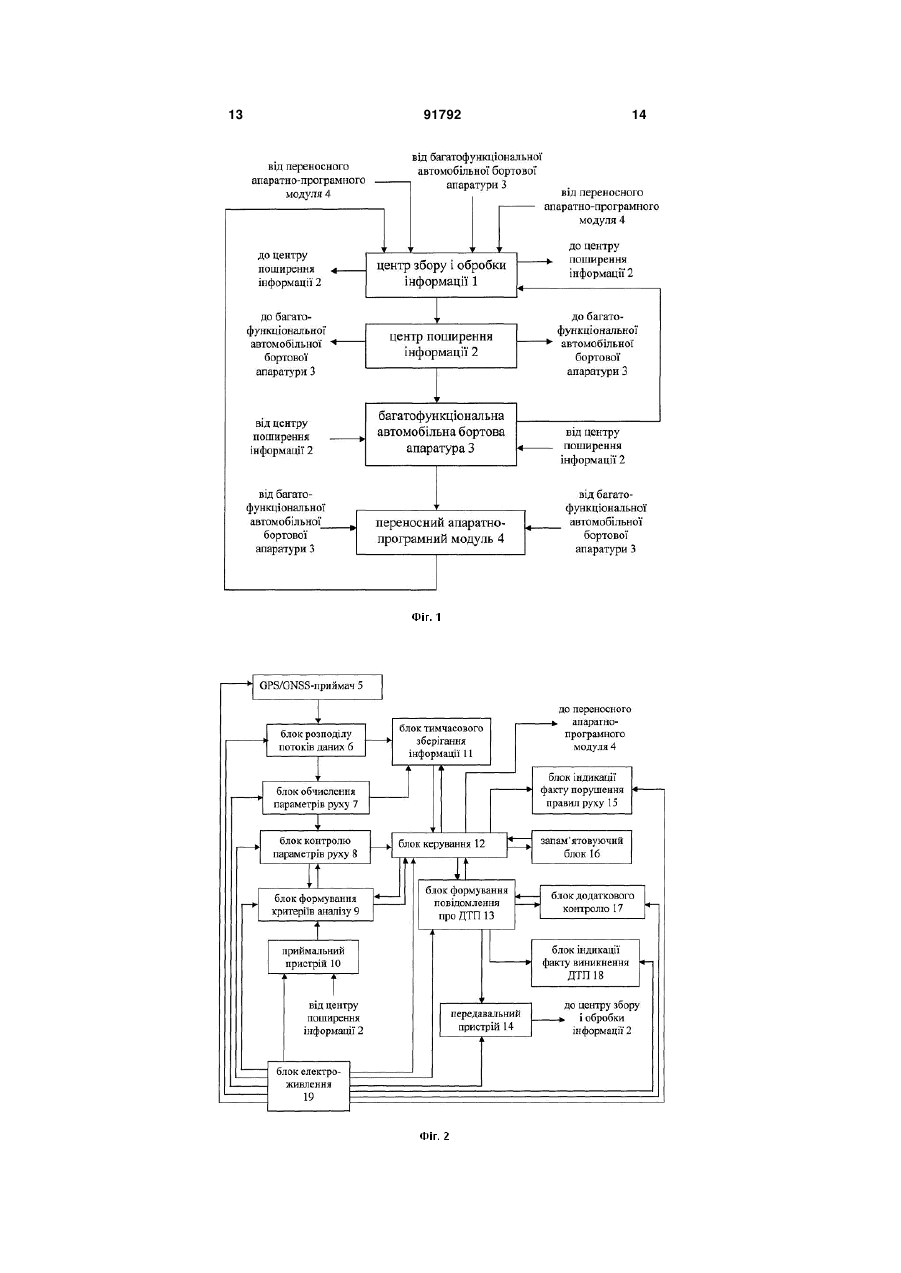
Система для автоматизованого контролю дотримання водієм автомобіля правил дорожнього руху та визначення факту виникнення дорожньотранспортної пригоди, до складу якої входить багатофункціональна автомобільна бортова апаратура, що включає в себе GPS/GNSS-приймач, запам'ятовуючий блок і блок електроживлення, яка відрізняється тим, що до її складу входять також центр збору і обробки інформації, мережа центрів поширення інформації і переносні апаратнопрограмні модулі, а багатофункціональна автомобільна бортова апаратура додатково включає в себе блок розподілу потоків даних, блок обчислення параметрів руху, блок контролю параметрів руху, блок формування критеріїв аналізу, приймальний пристрій, блок тимчасового зберігання інформації, блок керування, блок формування повідомлення про ДТП, передавальний пристрій, блок індикації факту порушення правил руху, блок додаткового контролю і блок індикації факту виникнення ДТП, і при цьому кожен вихід центру збору і обробки інформації з'єднаний із входом одного з центрів поширення інформації, кожен центр поширення інформації передає дані багатофункціональній автомобільній бортовій апаратурі, у якій ці 2 (19) 1 3 91792 4 блока керування, блока формування повідомлення про ДТП, передавального пристрою, блока індикації факту порушення правил руху, блока додатко вого контролю і блока індикації факту виникнення ДТП. Винахід належить до навігаційної техніки, та може бути використаний для підвищення безпеки руху автомобільного транспорту. Відомі GPS трекери [Jack W. Peters. GPS Navigation Guide - GPS Navigator Magazine.Com; Rev Bk&Acc edition (October 2002)], які з використанням сигналів супутникових навігаційних систем визначають координати і швидкість будь-якого об'єкта (зокрема, автомобіля) і передають обчислені параметри руху в реальному часі за допомогою GSM-модема у диспетчерський центр або архівують їх у пристрої накопичення інформації для подальшого аналізу. При цьому визначення параметрів руху відбувається з заданою періодичністю, але не частіше, ніж раз на хвилину. GPS трекери мають такі функціональні обмеження: 1) вони не проводять ніякого автоматичного аналізу визначених параметрів руху; 2) темп визначення параметрів руху за допомогою GPS трекера є недостатньо високим для того, щоб на основі цих даних робити якісь висновки про дотримання об'єктом правил дорожнього руху; 3) у GPS трекерах архівуються лише обчислені значення параметрів руху, а вихідна вимірювальна навігаційна інформація не зберігається, що не дає можливості проводити у післясеансному режимі її повторну обробку з залученням додаткових даних для отримання точніших значень параметрів руху. Найближчим за технічною суттю до пропонованого винаходу є пристрій для попередження водія автотранспорту про близькість аварійно небезпечного об'єкта [Патент України на винахід №79446 МПК G08G1/00, опублікований 25.06.2007, Бюлетень №9]. Цей пристрій за сигналами супутникових навігаційних систем визначає координати автотранспортного засобу і, порівнявши їх з координатами аварійно небезпечних об'єктів, що зберігаються у базі даних, генерує сигнал попередження водія у разі наближення автомобіля до такого об'єкта. Пристрій складається з GPSприймача, електронного блока перетворення, запам'ятовуючого блока, блока фільтрації сигналів, блока порівняння, генератора, світлового та звукового випромінювачів і блока електроживлення. При цьому в ньому вихід GPS-приймача з'єднаний з першими входами блока фільтрації сигналів і електронного блока перетворення, другими виходом і входом електронний блок перетворення з'єднаний з другими входом і виходом блока фільтрації сигналів, третіми входом і виходом блок фільтрації сигналів з'єднаний з першими виходом і входом запам'ятовуючого блока; перший вихід електронного блока перетворення і другий вихід запам'ятовуючого блока з'єднані зі входами блока порівняння, вихід якого з'єднаний зі світловим та звуковим випромінювачами через генератор, а блок електроживлення з'єднаний із входами живлення GPS-приймача, електронного блока перетворення та генератора. Цей пристрій має такі функціональні обмеження: 1) він не передбачає аналізу швидкості та інших параметрів руху автомобіля, що унеможливлює автоматичне визначення факту виникнення дорожньо-транспортної пригоди (ДТП) і ряду порушень правил руху (наприклад, перевищення швидкості); 2) він лише сповіщає про наближення автотранспортного засобу до того чи іншого об'єкта, але не аналізує інформацію про обмеження для параметрів руху, які існують на різних ділянках траєкторії автомобіля; 3) він не дозволяє накопичувати і зберігати вимірювальну навігаційну інформацію та результати її обробки і аналізу; 4) він не дає можливості проводити детальний аналіз зареєстрованої інформації і проконтролювати правильність сформованих попереджень. Технічною задачею винаходу є розширення функціональних можливостей пристрою шляхом доповнення автомобільної бортової апаратури блоком розподілу потоків даних, блоком обчислення параметрів руху, блоком контролю параметрів руху, блоком формування критеріїв аналізу, приймальним пристроєм, блоком тимчасового зберігання інформації, блоком керування, блоком формування повідомлення про ДТП, передавальним пристроєм, блоком індикації факту порушення правил руху, блоком додаткового контролю і блоком індикації факту виникнення ДТП, а також додаткового створення центру збору і обробки інформації, мережі центрів поширення інформації і переносних апаратно-програмних модулів, призначених для збору даних, накопичених автомобільною бортовою апаратурою і їх передачі у центр збору і обробки інформації. Ця задача вирішена наступним чином. В системі для автоматизованого контролю дотримання водієм автомобіля правил дорожнього руху та визначення факту виникнення дорожньотранспортної пригоди, до складу якої входить багатофункціональна автомобільна бортова апаратура, що включає в себе GPS/GNSS-приймач, запам'ятовуючий блок і блок електроживлення, згідно винаходу, додатково введено центр збору і обробки інформації, мережу центрів поширення інформації і переносні апаратно-програмні модулі, а багатофункціональна автомобільна бортова апаратура додатково включає в себе блок розподілу потоків даних, блок обчислення параметрів руху, блок контролю параметрів руху, блок формування критеріїв аналізу, приймальний пристрій, 5 блок тимчасового зберігання інформації, блок керування, блок формування повідомлення про ДТП, передавальний пристрій, блок індикації факту порушення правил руху, блок додаткового контролю і блок індикації факту виникнення ДТП, і при цьому кожен вихід центру збору і обробки інформації з'єднаний із входом одного з центрів поширення інформації, кожен центр поширення інформації передає дані багатофункціональній автомобільній бортовій апаратурі, у якій ці дані надходять на вхід приймального пристрою, вихід якого з'єднаний з першим входом блока формування критеріїв аналізу, другий вхід і перший вихід якого з'єднані з першими виходом і входом блока контролю параметрів руху, а вихід GPS/GNSS-приймача через блок розподілу потоків даних з'єднаний з першим входом блока тимчасового зберігання інформації і входом блока обчислення параметрів руху, перший вихід якого з'єднаний з другим входом блока контролю параметрів руху, а другий вихід блока обчислення параметрів руху з'єднаний з другим входом блока тимчасового зберігання інформації, першими входом і виходом блок керування з'єднаний з виходом і третім входом блока тимчасового зберігання інформації, другими виходом і входом блок керування з'єднаний із входом і виходом запам'ятовуючого блока, третіми виходом і входом блок керування з'єднаний з першими входом і виходом блока формування повідомлення про ДТП, четвертими виходом і входом блок керування з'єднаний з третім входом і другим виходом блока формування критеріїв аналізу, п'ятим входом блок керування з'єднаний з другим виходом блока контролю параметрів руху, п'ятим виходом блок керування з'єднаний із входом блока індикації факту порушення правил руху, другими виходом і входом блок формування повідомлення про ДТП з'єднаний із входом і виходом блока додаткового контролю, третій вихід блока формування повідомлення про ДТП з'єднаний із входом блока індикації факту виникнення ДТП, четвертий вихід блока формування повідомлення про ДТП з'єднаний із входом передавального пристрою, який передає інформацію у центр збору і обробки, а шостий вихід блока керування на час передачі даних з'єднується з входом переносного апаратно-програмного модуля, вихід якого також на час передачі даних з'єднується з входом центру збору і обробки інформації, і при цьому блок електроживлення з'єднаний із входами живлення GPS/GNSS-приймача, блока розподілу потоків даних, блока обчислення параметрів руху, блока контролю параметрів руху, блока формування критеріїв аналізу, приймального пристрою, блока керування, блока формування повідомлення про ДТП, передавального пристрою, блока індикації факту порушення правил руху, блока додаткового контролю і блока індикації факту виникнення ДТП. На Фіг.1 зображено загальну схему запропонованої системи. На Фіг.2 зображено схему багатофункціональної автомобільної бортової апаратури, яка є складовою частиною запропонованої системи. Система для автоматизованого контролю дотримання водієм автомобіля правил дорожнього 91792 6 руху та визначення факту виникнення дорожньотранспортної пригоди містить в собі центр збору і обробки інформації 1, центри поширення інформації 2, багатофункціональну автомобільну бортову апаратуру 3, переносні апаратно-програмні модулі 4, причому до складу багатофункціональної автомобільної бортової апаратури 3 входять: GPS/GNSS-приймач 5, блок розподілу потоків даних 6, блок обчислення параметрів руху 7, блок контролю параметрів руху 8, блок формування критеріїв аналізу 9, приймальний пристрій 10, блок тимчасового зберігання інформації 11, блок керування 12, блок формування повідомлення про ДТП 13, передавальний пристрій 14, блок індикації факту порушення правил руху 15, запам'ятовуючий блок 16, блок додаткового контролю 17, блок індикації факту виникнення ДТП 18 і блок електроживлення 19. Причому кожен вихід центру збору і обробки інформації 1 з'єднаний із входом одного з центрів поширення інформації 2, кожен центр поширення інформації 2 передає дані багатофункціональній автомобільній бортовій апаратурі 3, у якій ці дані надходять на вхід приймального пристрою 10, вихід якого з'єднаний з першим входом блока формування критеріїв аналізу 9, другий вхід і перший вихід якого з'єднані з першими виходом і входом блока контролю параметрів руху 8, а вихід GPS/GNSS-приймача 5 через блок розподілу потоків даних 6 з'єднаний з першим входом блока тимчасового зберігання інформації 11 і входом блока обчислення параметрів руху 7, перший вихід якого з'єднаний з другим входом блока контролю параметрів руху 8, а другий вихід блока обчислення параметрів руху 7 з'єднаний з другим входом блока тимчасового зберігання інформації 11, першими входом і виходом блок керування 12 з'єднаний з виходом і третім входом блока тимчасового зберігання інформації 11, другими виходом і входом блок керування 12 з'єднаний із входом і виходом запам'ятовуючого блока 16, третіми виходом і входом блок керування 12 з'єднаний з першими входом і виходом блока формування повідомлення про ДТП 13, четвертими виходом і входом блок керування 12 з'єднаний з третім входом і другим виходом блока формування критеріїв аналізу 9, п'ятим входом блок керування 12 з'єднаний з другим виходом блока контролю параметрів руху 8, п'ятим виходом блок керування 12 з'єднаний із входом блока індикації факту порушення правил руху 15, другими виходом і входом блок формування повідомлення про ДТП 13 з'єднаний із входом і виходом блока додаткового контролю 17, третій вихід блока формування повідомлення про ДТП 13 з'єднаний із входом блока індикації факту виникнення ДТП 18, четвертий вихід блока формування повідомлення про ДТП 13 з'єднаний із входом передавального пристрою 14, який передає інформацію у центр збору і обробки інформації 1, а шостий вихід блока керування 12 на час передачі даних з'єднується з входом переносного апаратно-програмного модуля 4, вихід якого також на час передачі даних з'єднується з входом центру збору і обробки інформації 1, і при цьому блок електроживлення 19 з'єднаний із входами живлення GPS/GNSS-приймача 5, блока розподілу пото 7 ків даних 6, блока обчислення параметрів руху 7, блока контролю параметрів руху 8, блока формування критеріїв аналізу 9, приймального пристрою 10, блока керування 12, блока формування повідомлення про ДТП 13, передавального пристрою 14, блока індикації факту порушення правил руху 15, блока додаткового контролю 17 і блока індикації факту виникнення ДТП 18. Система працює таким чином. У центрі збору і обробки інформації 1 зберігається база даних, що містить інформацію про діапазони координат, в межах яких діють обмеження (заборона паркування, обмеження швидкості або напрямків руху тощо), що визначаються розміщеними на вулицях даного населеного пункту дорожніми знаками. Сформовані на основі цієї інформації пакети даних, що містять формалізовані для подальшого використання правила руху, передаються за допомогою провідного зв'язку в центри поширення інформації 2. При цьому пакет даних, що надходить до центру поширення інформації 2, містить правила руху лише на тих ділянках вулиць, які розташовані в межах зони, прилеглої до цього центру і закріпленої за ним. Кожен з центрів поширення інформації 2 безперервно транслює ці дані, а також інформацію про час їх формування і про межі даної зони для усіх автотранспортних засобів, що перебувають на території цієї зони і прилеглих до неї зон і оснащені багатофункціональною автомобільною бортовою апаратурою 3. Для цього може використовуватися будь-який радіозв'язок (ультракороткохвильовий, GSM/GPRS або Wi-Fi зв'язок). Розділення на зони забезпечує зменшення об'єму даних, що передаються користувачам, а значить, прискорення передачі інформації та її обробки за допомогою багатофункціональної автомобільної бортової апаратури 3 кожного транспортного засобу. У багатофункціональній автомобільній бортовій апаратурі 3 GPS/GNSS-приймач 5 постійно, через кожний інтервал часу ∆t1, на основі сигналів навігаційних супутникових систем формує вимірювальну інформацію, що служить вихідними даними для визначення параметрів руху автомобіля. Вимірювальна інформація надходить до блоку розподілу потоків даних 6, який виконує наступні дві функції. По-перше, він передає вимірювальну інформацію з тією ж періодичністю, з якою вона була сформована, у блок тимчасового зберігання інформації 11, у якому зберігається вимірювальна інформація, накопичена протягом останнього інтервалу часу ∆t2, а також значення параметрів руху, сформовані протягом цього ж часу, і відбувається постійний циклічний перезапис цих даних. Подруге, раз на інтервал часу ∆t3, що складається з цілого числа інтервалів ∆t1, блок розподілу потоків даних 6 передає вимірювальну інформацію у блок обчислення параметрів руху 7, де на її основі оцінюються координати, швидкість, прискорення і швидкість зміни прискорення автомобіля. Усі обчислені параметри руху надходять у блок тимчасового зберігання інформації 11, а також у блок контролю параметрів руху 8, звідки, через кожний інтервал часу ∆t4, що складається з цілого числа 91792 8 інтервалів ∆t3, вектор координат автомобіля передається у блок формування критеріїв аналізу 9. Паралельно з цим, у цей же блок безперервно надходять дані про межі зон населеного пункту і час формування формалізованих правил руху для цих зон, отримувані приймальним пристроєм 10 від усіх центрів поширення інформації 2, що перебувають в області радіовидимості для поточного місця перебування автомобіля. У блоці формування критеріїв аналізу 9 постійно зберігається поточний перелік найближчих зон населеного пункту, що складається з зони перебування автомобіля і сусідніх з нею зон, а також інформація про формалізовані правила руху в межах цих зон і про час формування цих даних. Через кожний інтервал часу ∆t4, в результаті аналізу координат автомобіля і даних про межі зон населеного пункту, у блоці формування критеріїв аналізу 9 визначається, у якій із зон перебуває автомобіль. Якщо визначена поточна зона перебування входить до вже існуючого переліку найближчих зон, то виконується оновлення формалізованих правил руху для цієї зони. Для цього порівнюється час формування пакету даних, що транслюється відповідним центром поширення інформації 2, і правил руху, які зберігаються у блоці формування критеріїв аналізу 9, і, якщо трансльовані дані були сформовані пізніше, то для цієї зони виконується завантаження нового пакету даних, прийнятого приймальним пристроєм 10, і заміна старого набору правил руху на новий. Якщо визначена поточна зона перебування не входить до створеного раніше переліку найближчих зон, то для цієї зони виконується завантаження прийнятого приймальним пристроєм 10 пакету даних, що містить формалізовані правила руху. Після цього виконується спільна обробка координат автомобіля з правилами руху в межах поточної зони перебування і визначаються обмеження для параметрів руху (інтервали їх допустимих значень), що існують у поточному місці перебування автомобіля. Ці обмеження формуються і передаються у блок контролю параметрів руху 8 раз на інтервал часу ∆t4. У тому разі, якщо визначена поточна зона перебування автомобіля відрізняється від зони перебування, інформація про яку зберігається у блоці формування критеріїв аналізу 9, створюється новий перелік найближчих зон і набір формалізованих правил руху для них. При цьому втрачається вся інформація, що стосується зон, які були включені до старого переліку, але не увійшли до нового, а для кожної зони, яка не входила до старого переліку і була включена до нового, виконується завантаження прийнятого приймальним пристроєм 10 від відповідного центру поширення інформації 2 пакету даних, що містить формалізовані правила руху в межах цієї зони. Для решти зон, тобто для тих, що були і залишаються у переліку найближчих зон, виконується оновлення формалізованих правил руху за алгоритмом, описаним вище. У тому разі, якщо поточна зона перебування автомобіля залишилася незмінною, виконується 9 оновлення формалізованих правил руху для усіх сусідніх з нею зон. У блоці контролю параметрів руху 8 виконується порівняння оцінок реальних значень параметрів руху з межами інтервалів їх допустимих значень, в результаті чого формується набір ознак, що характеризують наявність чи відсутність порушення кожного з обмежень. Такі перевірки значень параметрів руху виконуються через кожний інтервал часу ∆t3, але при цьому, в межах одного інтервалу часу ∆t4, використовується фіксований набір сформованих обмежень. Разом з цим, виконується додаткова перевірка: якщо швидкість зміни прискорення автомобіля перевищує граничне допустиме значення, встановлене для цього параметра, то робиться висновок про виникнення ДТП і формується відповідна ознака. Усі ознаки, сформовані у блоці контролю параметрів руху 8, а також поточні значення параметрів руху передаються у блок керування 12, де відбувається їх аналіз. Якщо сформовані ознаки свідчать про недопустимі значення якихось параметрів руху, що означає порушення правил руху, то блок керування 12 передає до запам'ятовуючого блока 16 ці ознаки, обчислені поточні значення усіх параметрів руху, пакет формалізованих правил руху для поточної зони перебування автомобіля, отриманий за запитом від блока формування критеріїв аналізу 9, а також вимірювальну інформацію, отриману за запитом від блока тимчасового зберігання інформації 11. Взагалі, до запам'ятовуючого блока 16 заноситься вимірювальна інформація, накопичена протягом інтервалу часу ∆t5 (∆t5
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for automated control of car drivers keeping to rule of the road and determination of fact of traffic accident
Автори англійськоюDokhov Oleksandr Ivanovych, Lukianov Oleksandr Mykhailovych, Hrinchenko Olena Volodymyrivna, Lukianova Olha Oleksiivna, Sitenko Oleksandr Mykhailovych
Назва патенту російськоюСистема для автоматизированного контроля соблюдения водителем автомобиля правил дорожного движения и определения факта возникновения дорожно-транспортного происшествия
Автори російськоюДохов Александр Иванович, Лукьянов Александр Михайлович, Гринченко Елена Владимировна, Лукьянова Ольга Алексеевна, Ситенко Александр Николаевич
МПК / Мітки
МПК: G08G 1/052, G08G 1/056, G01C 21/26
Мітки: пригоди, правил, факту, дорожньо-транспортної, автомобіля, руху, контролю, дорожнього, виникнення, система, визначення, автоматизованого, дотримання, водієм
Код посилання
<a href="https://ua.patents.su/8-91792-sistema-dlya-avtomatizovanogo-kontrolyu-dotrimannya-vodiehm-avtomobilya-pravil-dorozhnogo-rukhu-ta-viznachennya-faktu-viniknennya-dorozhno-transportno-prigodi.html" target="_blank" rel="follow" title="База патентів України">Система для автоматизованого контролю дотримання водієм автомобіля правил дорожнього руху та визначення факту виникнення дорожньо-транспортної пригоди</a>
Система для автоматизованого контролю дотримання водієм автомобіля правил дорожнього руху

Номер патенту: 88999
Опубліковано: 10.12.2009
Автори: Грінченко Олена Володимирівна, Лук'янов Олександр Михайлович, Лук'янова Ольга Олексіївна, Дохов Олександр Іванович
МПК: G01C 21/26, G08G 1/052, G08G 1/056
Мітки: дотримання, система, руху, правил, автоматизованого, автомобіля, контролю, дорожнього, водієм
Формула / Реферат:
Система для автоматизованого контролю дотримання водієм автомобіля правил дорожнього руху, до складу якої входить багатофункціональна автомобільна бортова апаратура, що включає в себе GNSS-приймач, запам'ятовуючий блок і блок електроживлення, яка відрізняється тим, що до її складу входять також центр збору і обробки інформації, мережа центрів поширення інформації і переносні апаратно-програмні модулі, а багатофункціональна автомобільна...
Спосіб автоматизованого контролю виконання правил дорожнього руху
Номер патенту: 12164
Опубліковано: 16.01.2006
Автори: Душник Володимир Феліксович, Ущенко Валентин Іванович, Васильєв Олександр Павлович, Бурачек Всеволод Германович, Зайцев Сергій Анатолійович
МПК: G08G 1/01
Мітки: виконання, спосіб, автоматизованого, контролю, руху, дорожнього, правил
Формула / Реферат:
Спосіб автоматизованого контролю виконання Правил дорожнього руху, що включає вимірювання швидкості дорожньо-транспортного засобу (ДТЗ), що контролюється, та урахування супутніх факторів фіксування порушень Правил дорожнього руху з застосуванням процесора, який відрізняється тим, що при встановленні факту порушення швидкісного режиму водієм ДТЗ визначають та вводять в пам'ять процесора номер вимірювача швидкості ДТЗ, дату порушення, код...
Система автоматизованого керування й контролю вагона-автомобілевоза

Номер патенту: 37007
Опубліковано: 10.11.2008
Автори: Макаренко Валентин Миколайович, Рачок Микола Миколайович, Бандура Іван Миколайович, Зибін Віктор Георгійович
МПК: H02B 15/00
Мітки: вагона-автомобілевоза, система, керування, контролю, автоматизованого
Формула / Реферат:
Система автоматизованого керування й контролю вагона-автомобілевоза, яка відрізняється тим, що в неї уведені система пожежної сигналізації й блок керування й контролю, що містить джерело живлення, обмежник напруги, перший вихід якого з'єднаний з першим входом блока комутації, а другий його вихід з'єднаний із входом системи контролю нагрівання букс, контролер, перший вихід якого з'єднаний із другим входом блока комутації, а другий його вихід...
Спосіб об’єктивізації динаміки дорожньо-транспортної ситуації
Номер патенту: 3206
Опубліковано: 15.10.2004
Автори: Григорян Рафік Давидович, Руденко Юрій Володимирович, Шатров Анатолій Євгенович
МПК: G08G 1/09
Мітки: спосіб, об'єктивізації, ситуації, дорожньо-транспортної, динаміки
Формула / Реферат:
Спосіб об'єктивізації дорожньо-транспортної ситуації, який передбачає запис таких параметрів руху транспортного засобу як дата, час та швидкість руху, який відрізняється тим, що додатково протягом заданого періоду часу в обмежений об'єм оперативної пам'яті записують передній та задній відеоогляд з ідентифікацією номера переднього транспортного засобу і відстані до нього, повторюючи такий запис кожний заданий період часу в той же об'єм...
Пристрій “алібі” об’єктивізації динаміки дорожньо-транспортної ситуації
Номер патенту: 8508
Опубліковано: 15.08.2005
Автор: Григорян Рафік Давидович
МПК: G01C 23/00, G03B 19/00
Мітки: дорожньо-транспортної, алібі, динаміки, ситуації, об'єктивізації, пристрій
Формула / Реферат:
Пристрій об'єктивізації динаміки дорожньо-транспортної ситуації, що містить блоки реєстрації дати, часу, швидкості, блок довгострокової пам'яті, блок перетворення інформації, на входи якого підключені виходи блоків реєстрації дати, часу та швидкості, а один із виходів підключений до одного із входів довгострокової пам'яті, який відрізняється тим, що він містить відеокамери переднього та заднього огляду, блок оперативної пам'яті, блок...
Попередній патент: Проточний геліоколектор
Наступний патент: Спосіб експлуатації конвертера
Випадковий патент: Апарат для автоматичного виготовлення випечених харчових продуктів з тіста та місильний апарат для нього