Спосіб вимірювання квазістаціонарного магнітного поля
Номер патенту: 82496
Опубліковано: 25.04.2008
Автори: Голяка Роман Любомирович, Гєрасімов Сєргєй Ніколаєвіч, Большакова Інеса Антонівна


Формула / Реферат
1. Спосіб вимірювання квазістаціонарного магнітного поля, який включає вимірювання вихідної напруги гальваномагнітного перетворювача та наступний розрахунок індукції вимірюваного магнітного поля за виміряним значенням вихідної напруги та наперед відомою чутливістю гальваномагнітного перетворювача, яку визначають шляхом періодичного калібрування гальваномагнітного перетворювача через встановлення співвідношення між зміною магнітного поля та відповідною зміною вихідної напруги гальваномагнітного перетворювача, який відрізняється тим, що калібрування проводять безпосередньо в процесі вимірювання магнітного поля, а зміною магнітного поля, яку використовують для калібрування перетворювача, є зміна самого вимірюваного магнітного поля, причому калібрування здійснюють лише тоді, коли зміна вимірюваного магнітного поля за наперед визначений проміжок часу перевищує наперед задану величину.
2. Спосіб за п.1, який відрізняється тим, що зміну вимірюваного магнітного поля в процесі калібрування вимірюють індуктивним перетворювачем поля.
3. Спосіб за пп.1,2, який відрізняється тим, що величину зміни вимірюваного магнітного поля визначають шляхом інтегрування виміряної вихідної напруги індуктивного перетворювача поля.
4. Спосіб за пп.1,2,3, який відрізняється тим, що індуктивний перетворювач поля містить котушку.
5. Спосіб за пп.1,2,3,4, який відрізняється тим, що гальваномагнітний перетворювач поля розміщують всередині котушки індуктивного перетворювача поля.
Текст
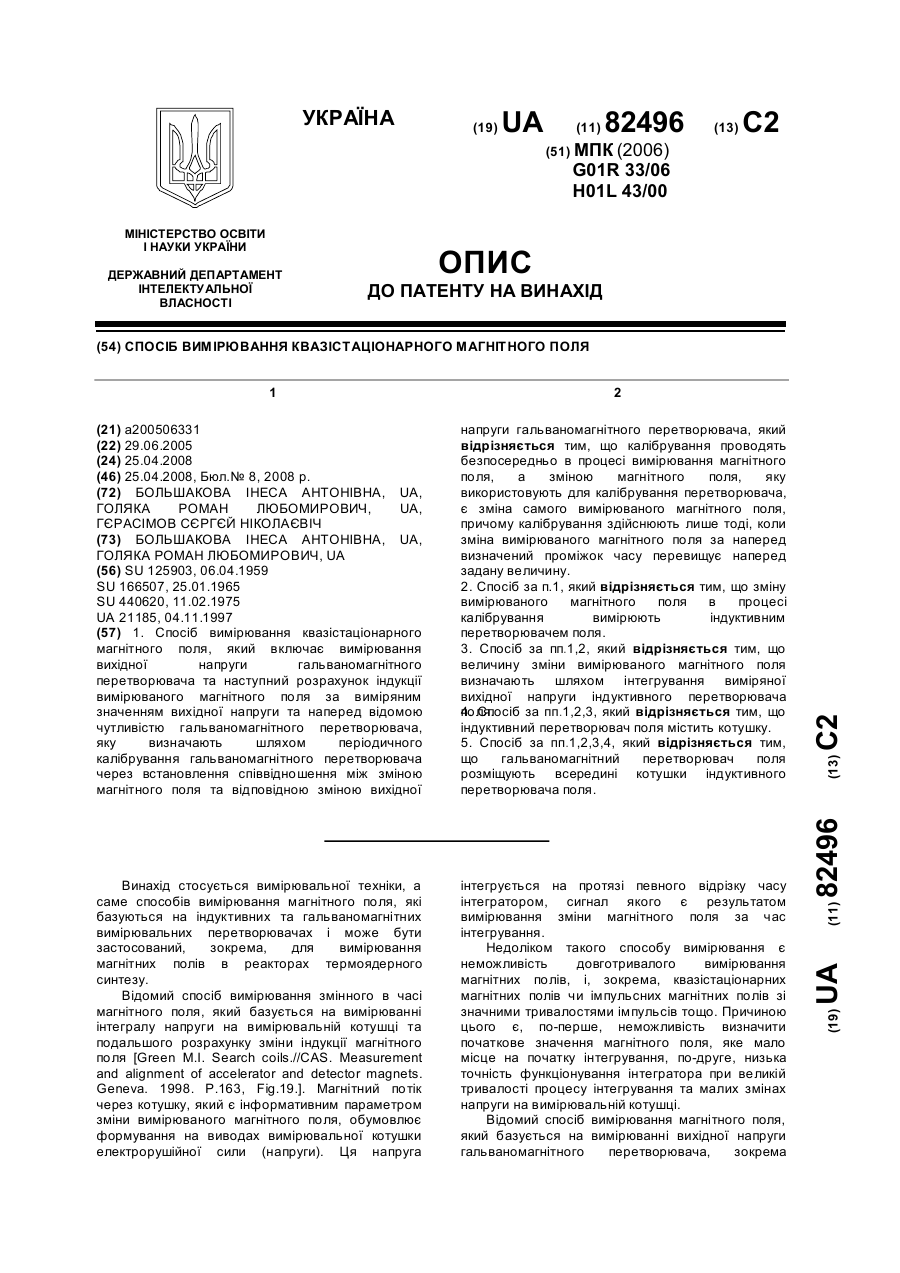
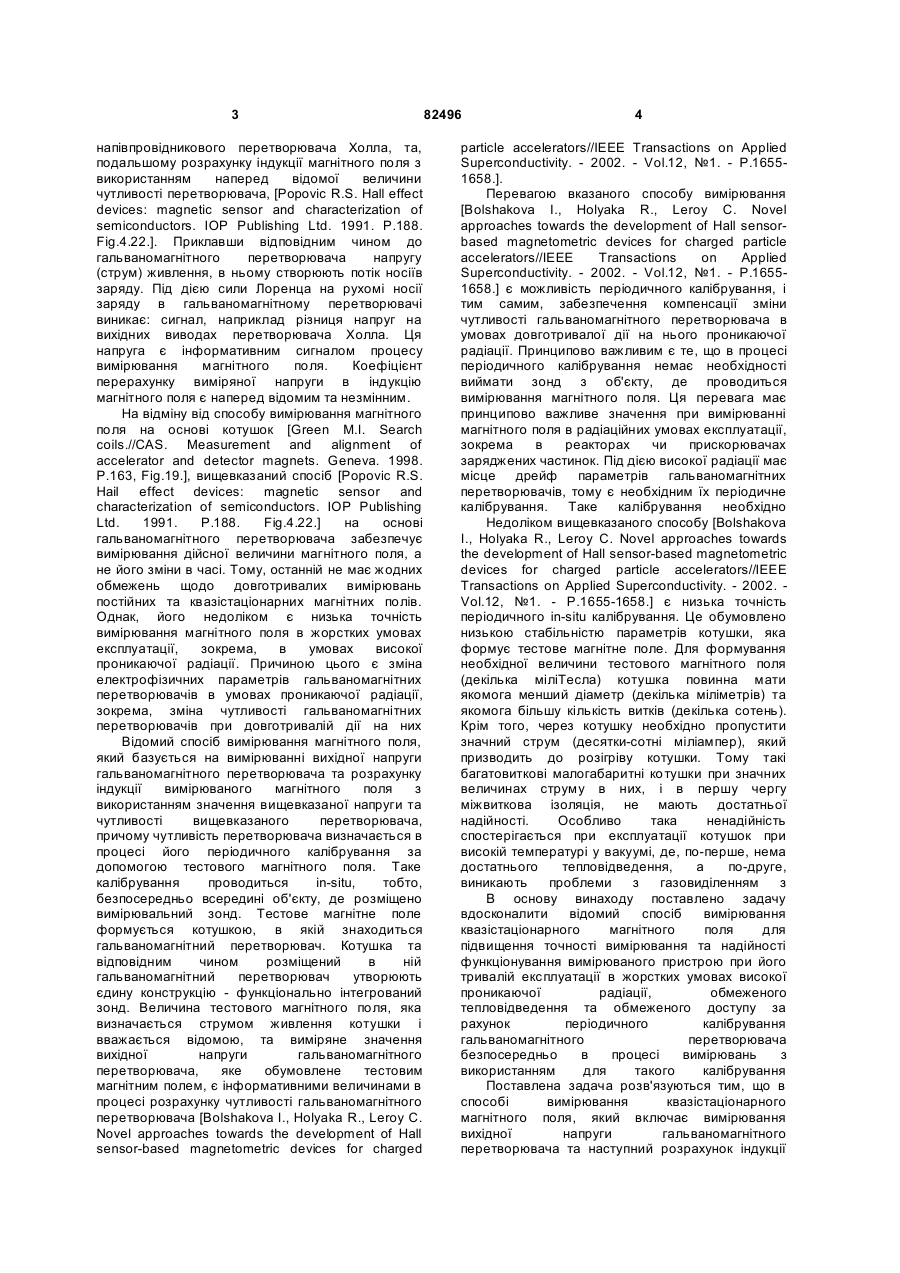
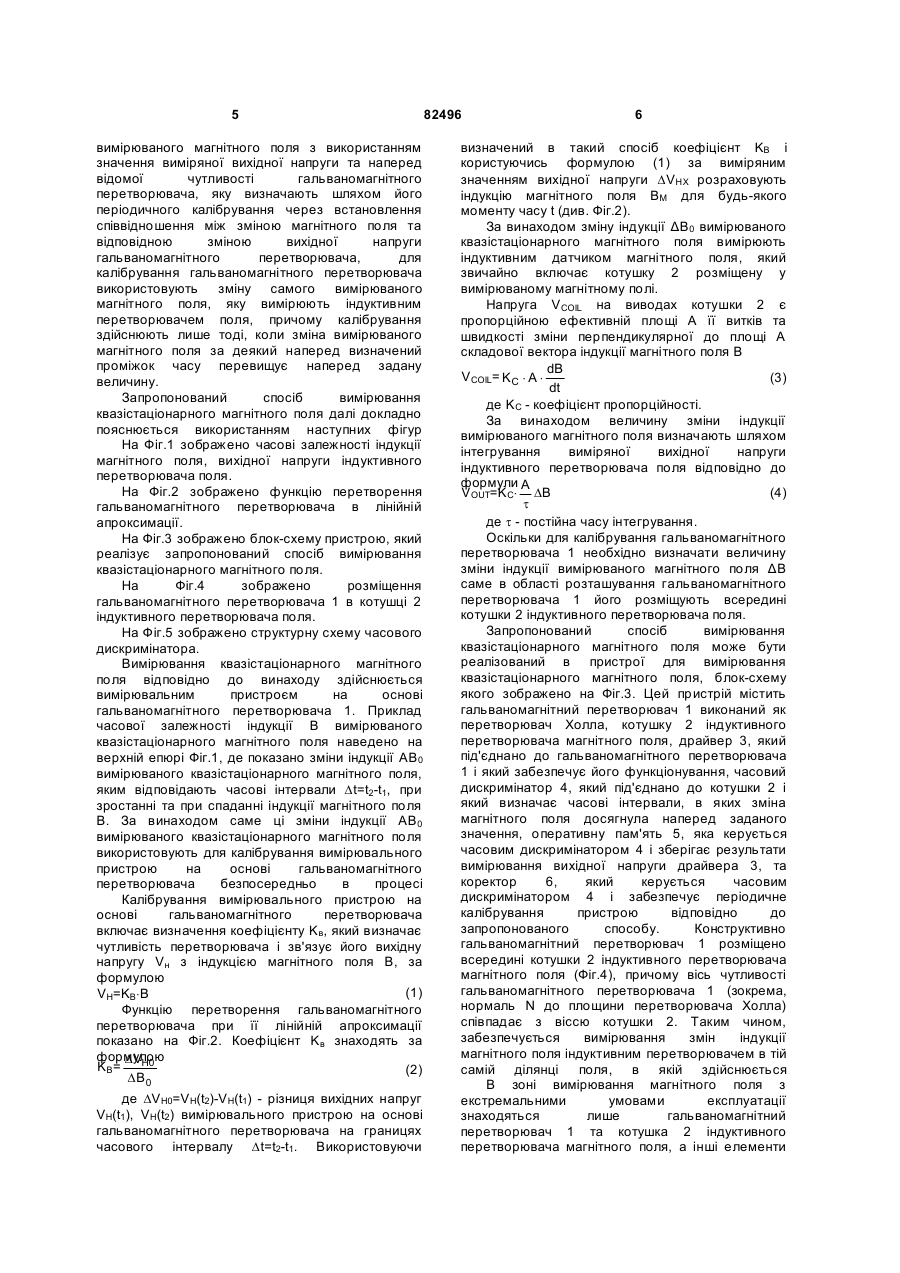
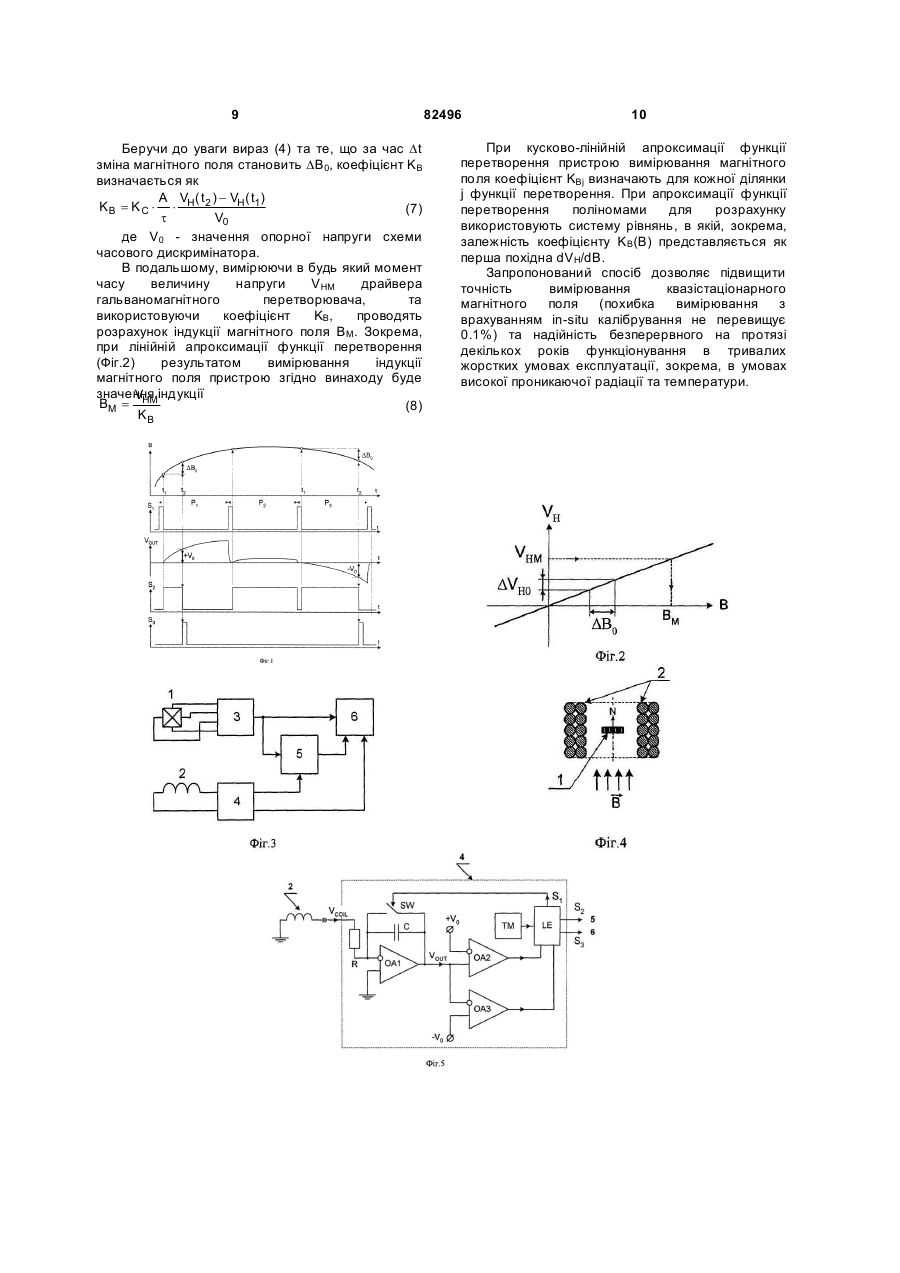
1. Спосіб вимірювання квазістаціонарного магнітного поля, який включає вимірювання вихідної напруги гальваномагнітного перетворювача та наступний розрахунок індукції вимірюваного магнітного поля за виміряним значенням вихідної напруги та наперед відомою чутливістю гальваномагнітного перетворювача, яку визначають шляхом періодичного калібрування гальваномагнітного перетворювача через встановлення співвідношення між зміною магнітного поля та відповідною зміною вихідної C2 2 (19) 1 3 напівпровідникового перетворювача Холла, та, подальшому розрахунку індукції магнітного поля з використанням наперед відомої величини чутливості перетворювача, [Popovic R.S. Hall effect devices: magnetic sensor and characterization of semiconductors. IOP Publishing Ltd. 1991. P.188. Fig.4.22.]. Приклавши відповідним чином до гальваномагнітного перетворювача напругу (струм) живлення, в ньому створюють потік носіїв заряду. Під дією сили Лоренца на рухомі носії заряду в гальваномагнітному перетворювачі виникає: сигнал, наприклад різниця напруг на вихідних виводах перетворювача Холла. Ця напруга є інформативним сигналом процесу вимірювання магнітного поля. Коефіцієнт перерахунку виміряної напруги в індукцію магнітного поля є наперед відомим та незмінним. На відміну від способу вимірювання магнітного поля на основі котушок [Green M.I. Search coils.//CAS. Measurement and alignment of accelerator and detector magnets. Geneva. 1998. P.163, Fig.19.], вищевказаний спосіб [Popovic R.S. Hail effect devices: magnetic sensor and characterization of semiconductors. IOP Publishing Ltd. 1991. P.188. Fig.4.22.] на основі гальваномагнітного перетворювача забезпечує вимірювання дійсної величини магнітного поля, а не його зміни в часі. Тому, останній не має жодних обмежень щодо довготривалих вимірювань постійних та квазістаціонарних магнітних полів. Однак, його недоліком є низька точність вимірювання магнітного поля в жорстких умовах експлуатації, зокрема, в умовах високої проникаючої радіації. Причиною цього є зміна електрофізичних параметрів гальваномагнітних перетворювачів в умовах проникаючої радіації, зокрема, зміна чутливості гальваномагнітних перетворювачів при довготривалій дії на них заряджених частинок чи нейтронів. Відомий спосіб вимірювання магнітного поля, який базується на вимірюванні вихідної напруги гальваномагнітного перетворювача та розрахунку індукції вимірюваного магнітного поля з використанням значення вищевказаної напруги та чутливості вищевказаного перетворювача, причому чутливість перетворювача визначається в процесі його періодичного калібрування за допомогою тестового магнітного поля. Таке калібрування проводиться in-situ, тобто, безпосередньо всередині об'єкту, де розміщено вимірювальний зонд. Тестове магнітне поле формується котушкою, в якій знаходиться гальваномагнітний перетворювач. Котушка та відповідним чином розміщений в ній гальваномагнітний перетворювач утворюють єдину конструкцію - функціонально інтегрований зонд. Величина тестового магнітного поля, яка визначається струмом живлення котушки і вважається відомою, та виміряне значення вихідної напруги гальваномагнітного перетворювача, яке обумовлене тестовим магнітним полем, є інформативними величинами в процесі розрахунку чутливості гальваномагнітного перетворювача [Bolshakova I., Holyaka R., Leroy C. Novel approaches towards the development of Hall sensor-based magnetometric devices for charged 82496 4 particle accelerators//IEEE Transactions on Applied Superconductivity. - 2002. - Vol.12, №1. - P.16551658.]. Перевагою вказаного способу вимірювання [Bolshakova I., Holyaka R., Leroy С. Novel approaches towards the development of Hall sensorbased magnetometric devices for charged particle accelerators//IEEE Transactions on Applied Superconductivity. - 2002. - Vol.12, №1. - P.16551658.] є можливість періодичного калібрування, і тим самим, забезпечення компенсації зміни чутливості гальваномагнітного перетворювача в умовах довготривалої дії на нього проникаючої радіації. Принципово важливим є те, що в процесі періодичного калібрування немає необхідності виймати зонд з об'єкту, де проводиться вимірювання магнітного поля. Ця перевага має принципово важливе значення при вимірюванні магнітного поля в радіаційних умовах експлуатації, зокрема в реакторах чи прискорювачах заряджених частинок. Під дією високої радіації має місце дрейф параметрів гальваномагнітних перетворювачів, тому є необхідним їх періодичне калібрування. Таке калібрування необхідно проводити in-situ. Недоліком вищевказаного способу [Bolshakova I., Holyaka R., Leroy C. Novel approaches towards the development of Hall sensor-based magnetometric devices for charged particle accelerators//IEEE Transactions on Applied Superconductivity. - 2002. Vol.12, №1. - P.1655-1658.] є низька точність періодичного in-situ калібрування. Це обумовлено низькою стабільністю параметрів котушки, яка формує тестове магнітне поле. Для формування необхідної величини тестового магнітного поля (декілька міліТесла) котушка повинна мати якомога менший діаметр (декілька міліметрів) та якомога більшу кількість витків (декілька сотень). Крім того, через котушку необхідно пропустити значний струм (десятки-сотні міліампер), який призводить до розігріву котушки. Тому такі багатовиткові малогабаритні котушки при значних величинах струму в них, і в першу чергу міжвиткова ізоляція, не мають достатньої надійності. Особливо така ненадійність спостерігається при експлуатації котушок при високій температурі у вакуумі, де, по-перше, нема достатнього тепловідведення, а по-друге, виникають проблеми з газовиділенням з компаунду чи лакувинаходу поставлено задачу В основу міжвиткової ізоляції. вдосконалити відомий спосіб вимірювання квазістаціонарного магнітного поля для підвищення точності вимірювання та надійності функціонування вимірюваного пристрою при його тривалій експлуатації в жорстких умовах високої проникаючої радіації, обмеженого тепловідведення та обмеженого доступу за рахунок періодичного калібрування гальваномагнітного перетворювача безпосередньо в процесі вимірювань з використанням для такого калібрування періодичних змін індукції самого вимірюваного Поставлена задача розв'язуються тим, що в способі квазістаціонарного магнітного поля. вимірювання квазістаціонарного магнітного поля, який включає вимірювання вихідної напруги гальваномагнітного перетворювача та наступний розрахунок індукції 5 вимірюваного магнітного поля з використанням значення виміряної вихідної напруги та наперед відомої чутливості гальваномагнітного перетворювача, яку визначають шляхом його періодичного калібрування через встановлення співвідношення між зміною магнітного поля та відповідною зміною вихідної напруги гальваномагнітного перетворювача, для калібрування гальваномагнітного перетворювача використовують зміну самого вимірюваного магнітного поля, яку вимірюють індуктивним перетворювачем поля, причому калібрування здійснюють лише тоді, коли зміна вимірюваного магнітного поля за деякий наперед визначений проміжок часу перевищує наперед задану величину. Запропонований спосіб вимірювання квазістаціонарного магнітного поля далі докладно пояснюється використанням наступних фігур зображення. зображено часові залежності індукції На Фіг.1 магнітного поля, вихідної напруги індуктивного перетворювача поля. На Фіг.2 зображено функцію перетворення гальваномагнітного перетворювача в лінійній апроксимації. На Фіг.3 зображено блок-схему пристрою, який реалізує запропонований спосіб вимірювання квазістаціонарного магнітного поля. На Фіг.4 зображено розміщення гальваномагнітного перетворювача 1 в котушці 2 індуктивного перетворювача поля. На Фіг.5 зображено структурну схему часового дискримінатора. Вимірювання квазістаціонарного магнітного поля відповідно до винаходу здійснюється вимірювальним пристроєм на основі гальваномагнітного перетворювача 1. Приклад часової залежності індукції В вимірюваного квазістаціонарного магнітного поля наведено на верхній епюрі Фіг.1, де показано зміни індукції АВ0 вимірюваного квазістаціонарного магнітного поля, яким відповідають часові інтервали Dt=t2-t1, при зростанні та при спаданні індукції магнітного поля В. За винаходом саме ці зміни індукції АВ0 вимірюваного квазістаціонарного магнітного поля використовують для калібрування вимірювального пристрою на основі гальваномагнітного перетворювача безпосередньо в процесі вимірювання магнітного поля. Калібрування вимірювального пристрою на основі гальваномагнітного перетворювача включає визначення коефіцієнту Kв, який визначає чутливість перетворювача і зв'язує його вихідну напругу Vн з індукцією магнітного поля В, за формулою (1) VH=KB×B Функцію перетворення гальваномагнітного перетворювача при її лінійній апроксимації показано на Фіг.2. Коефіцієнт Kв знаходять за формулою DV KB= Н0 (2) DВ0 де DVH0=VH(t2)-VH(t1) - різниця вихідних напруг VH(t1), VH(t2) вимірювального пристрою на основі гальваномагнітного перетворювача на границях часового інтервалу Dt=t2-t1. Використовуючи 82496 6 визначений в такий спосіб коефіцієнт KB і користуючись формулою (1) за виміряним значенням вихідної напруги DVHX розраховують індукцію магнітного поля ВM для будь-якого моменту часу t (див. Фіг.2). За винаходом зміну індукції ΔΒ0 вимірюваного квазістаціонарного магнітного поля вимірюють індуктивним датчиком магнітного поля, який звичайно включає котушку 2 розміщену у вимірюваному магнітному полі. Напруга VCOIL на виводах котушки 2 є пропорційною ефективній площі А її витків та швидкості зміни перпендикулярної до площі А складової вектора індукції магнітного поля В dB VCOIL= K C × A × (3) dt де KC - коефіцієнт пропорційності. За винаходом величину зміни індукції вимірюваного магнітного поля визначають шляхом інтегрування виміряної вихідної напруги індуктивного перетворювача поля відповідно до формули А VOUT=KC× DВ (4) t де t - постійна часу інтегрування. Оскільки для калібрування гальваномагнітного перетворювача 1 необхідно визначати величину зміни індукції вимірюваного магнітного поля ΔΒ саме в області розташування гальваномагнітного перетворювача 1 його розміщують всередині котушки 2 індуктивного перетворювача поля. Запропонований спосіб вимірювання квазістаціонарного магнітного поля може бути реалізований в пристрої для вимірювання квазістаціонарного магнітного поля, блок-схему якого зображено на Фіг.3. Цей пристрій містить гальваномагнітний перетворювач 1 виконаний як перетворювач Холла, котушку 2 індуктивного перетворювача магнітного поля, драйвер 3, який під'єднано до гальваномагнітного перетворювача 1 і який забезпечує його функціонування, часовий дискримінатор 4, який під'єднано до котушки 2 і який визначає часові інтервали, в яких зміна магнітного поля досягнула наперед заданого значення, оперативну пам'ять 5, яка керується часовим дискримінатором 4 і зберігає результати вимірювання вихідної напруги драйвера 3, та коректор 6, який керується часовим дискримінатором 4 і забезпечує періодичне калібрування пристрою відповідно до запропонованого способу. Конструктивно гальваномагнітний перетворювач 1 розміщено всередині котушки 2 індуктивного перетворювача магнітного поля (Фіг.4), причому вісь чутливості гальваномагнітного перетворювача 1 (зокрема, нормаль N до площини перетворювача Холла) співпадає з віссю котушки 2. Таким чином, забезпечується вимірювання змін індукції магнітного поля індуктивним перетворювачем в тій самій ділянці поля, в якій здійснюється вимірювання вимірюваннямагнітного В зоні індукції магнітного поля поля за з екстремальними допомогою перетворювача Холла. умовами експлуатації знаходяться лише гальваномагнітний перетворювач 1 та котушка 2 індуктивного перетворювача магнітного поля, а інші елементи 7 пристрою для вимірювання магнітного поля знаходяться поза зоною з екстремальними умовами експлуатації, що практично виключає вплив на них дестабілізуючих факторів, що діють в зоні з екстремальними умовами експлуатації. Вимірювання магнітного поля здійснюється гальваномагнітним перетворювачем 1 (перетворювачем Холла). Драйвер 3 забезпечує формування сигналу гальваномагнітного перетворювача і включає стабілізатор струму живлення гальваномагнітного перетворювача, підсилювач та аналого-цифровий перетворювач йогоДля спрощення викладу використаємо лінійну сигналу. апроксимацію функції перетворення пристрою вимірювання магнітного поля з перетворювачем Холла в якості гальваномагнітного перетворювача. Тоді вихідна напруга драйвера VH може бути подана у вигляді VΗ=ΚΗ·ΚΑ·Ι Η·Β (5) де KH - магнітна чутливість перетворювача Холла; KА - коефіцієнт перетворення сигналу драйвером; І H - струм живлення перетворювача Холла; В - перпендикулярна до площини перетворювача Холла складова вектора індукції магнітного поля. В процесі тривалої експлуатації пристрою вимірювання магнітного поля в екстремальних умовах експлуатації магнітна чутливість KH гальваномагнітного перетворювача зазнає змін, що призводить до виникнення похибки вимірювання. В загальному випадку джерелами нестабільності також можуть бути коефіцієнт перетворення KА та струм живлення І Н. Тому калібрування гальваномагнітного перетворювача включає визначення єдиного коефіцієнту KB, який зв'язує вихідну напругу VH вимірювального пристрою з індукцією магнітного поля відповідно до формули (1). Часовий дискримінатор 4 визначає часові інтервали, на границях яких зміна магнітного поля, виміряна з допомогою котушки 2, досягає заданого значення ΔΒ0. Згідно винаходу на вхід часового дискримінатора 4 надходить напруга VCOIL з котушки 2 індуктивного перетворювача магнітного поля, а вихід часового дискримінатора 4 керує роботою оперативної пам'яті 5 та коректора б цього пристрою. Варіант структурної схеми часового дискримінатора 4 та його зв'язки з іншими елементами пристрою наведено на Фіг.5. Такий часовий дискримінатор містить інтегратор (операційний підсилювач OA1, резистор R, конденсатор С та ключ SW), два компаратори(операційні підсилювачі OА2, ОА3З), логічний елементOUT та на Напруга V LE таймер ТМ. виході інтегратора визначається формулою (4), в якій t=RC - постійна часу інтегратора. Отже котушка 2 індуктивного перетворювача магнітного поля та інтегратор забезпечують вимірювання зміни індукції магнітного поля, результат якого практично не залежить від дестабілізуючих факторів, зокрема від високого рівня проникаючої радіації та температури. Необхідно відзначити, що можлива зміна електрофізичних параметрів дроту котушки 2 ніяким чином не впливає на сигнал. Відповідно до 82496 8 формули (3) сигнал, що знімається з котушки 2 визначається не електрофізичними параметрами дроту, а лише ефективною площею її витків А, яка не змінюється під дією радіації. Роботу часового дискримінатора демонструють часові епюри (Фіг.1), на яких показано часову зміну індукції магнітного поля B(t), вихідну напругу інтегратора VOUT(t) та імпульси керування S1, S2, S3. Таймер ТМ (Фіг.5) формує послідовність синхронізуючих імпульсів S1(t), тривалість та період слідування яких є фіксованими Ρ1 Р2 Р3=const. = = Синхронізуючі імпульси S1(t)періодично замикають ключ SW, що обнулює напругу на виході інтегратора, VOUT(t1)=0. Відразу по завершенню кожного синхронізуючого імпульсу (t1) розпочинається процес періодичного інтегрування (вимірювання магнітного поля) та формується передній фронт імпульсу S2(t) керування оперативною пам'яттю. Цей імпульс виконує функцію команди, яка вибирає та заносить в оперативну пам'ять 5 вихідний сигнал VH(t1) драйвера 3 гальваномагнітного перетворювача 1. Переважно, цей сигнал вже сформовано в цифровому виді аналого-цифровим перетворювачем цього драйвера. Таким чином, в пам'ять 5 заноситься напруга V H(t), яка є інформативною величиною виміряної за допомогою гальваномагнітного перетворювача 1 індукції магнітного поля B(t1). Подальша робота часового дискримінатора залежить від швидкості зміни магнітного поля B(t). У випадку достатньо високої швидкої зміни магнітного поля, напруга на виході інтегратора VOUT перевищить одне з опорних значень +V0 (для прикладу, перший період Р1 на Фіг.1) або – V0 (третій період Р3 на Фіг.1) ще до початку наступного синхронізуючого імпульсу. Ці опорні значення напруги визначають порогові значення зміни магнітного поля ΔΒ0. В момент часу t2, коли має місце рівність вихідної напруги інтегратора одній з опорних напруг VOUT=±V0, формується спад імпульсу S2(t) та фронт імпульсу S3(t) керування коректора 6 (Фіг.1). В цей час вимірюється і заноситься в оперативну пам'ять вихідний сигнал VH(t2) драйвера гальваномагнітного перетворювача. У протилежному випадку, коли до завершення періоду (для прикладу, другий період Р2) зміна магнітного поля не перевищить порогового значення DВ0, синхронізуючий імпульс S1(t) наступного періоду обнулить інтегратор. Як наслідок цього, імпульс S3(t) не буде сформовано. Таким чином, при незначній зміні магнітного поля, коли точність функціонування інтегратора є низькою, корекція функції перетворення пристрою вимірювання магнітного поля згідно винаходу не виконується. 6 (Фіг.3) розраховує коефіцієнт Кв, Коректор який зв'язує визначений часовим дискримінатором часовий інтервал Dt=t2-t1, в якому відбулася зміна магнітного поля DВ0, з вихідними напругами V H(t1), VH(t2) драйвера гальваномагнітного перетворювача на границях цього часового інтервалу за формулою V ( t ) - VH( t1 ) KB = H 2 (6) DB0 9 Беручи до уваги вираз (4) та те, що за час Dt зміна магнітного поля становить DВ0, коефіцієнт KB визначається як A V ( t ) - VH( t1) KB = K C × × H 2 (7) t V0 де V0 - значення опорної напруги схеми часового дискримінатора. В подальшому, вимірюючи в будь який момент часу величину напруги VHM драйвера гальваномагнітного перетворювача, та використовуючи коефіцієнт KB, проводять розрахунок індукції магнітного поля ВM. Зокрема, при лінійній апроксимації функції перетворення (Фіг.2) результатом вимірювання індукції магнітного поля пристрою згідно винаходу буде значення індукції V BM = HM (8) KB 82496 10 При кусково-лінійній апроксимації функції перетворення пристрою вимірювання магнітного поля коефіцієнт KВj визначають для кожної ділянки j функції перетворення. При апроксимації функції перетворення поліномами для розрахунку використовують систему рівнянь, в якій, зокрема, залежність коефіцієнту KВ(В) представляється як перша похідна dVH/dB. Запропонований спосіб дозволяє підвищити точність вимірювання квазістаціонарного магнітного поля (похибка вимірювання з врахуванням in-situ калібрування не перевищує 0.1%) та надійність безперервного на протязі декількох років функціонування в тривалих жорстких умовах експлуатації, зокрема, в умовах високої проникаючої радіації та температури. 11 Комп’ютерна верстка Т. Чепелева 82496 Підписне 12 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for measurement of quasi-stationary magnetic field
Автори англійськоюBolshakova Inesa Antonivna, Holiaka Roman Liubomyrovych, Herasymov Serhii Mykolaiovych
Назва патенту російськоюСпособ измерения квазистационарного магнитного поля
Автори російськоюБольшакова Инесса Антоновна, Голяка Роман Любомирович, Герасимов Сергей Николаевич
МПК / Мітки
МПК: G01R 33/06, H01L 43/00
Мітки: магнітного, спосіб, квазістаціонарного, поля, вимірювання
Код посилання
<a href="https://ua.patents.su/6-82496-sposib-vimiryuvannya-kvazistacionarnogo-magnitnogo-polya.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання квазістаціонарного магнітного поля</a>
Магнітометр третього порядку для вимірювання осьового октупольного моменту джерел зовнішньго магнітного поля
Номер патенту: 43185
Опубліковано: 15.11.2001
Автор: Дегтярьов Віталій Валентинович
МПК: G01R 33/02, G01V 3/08
Мітки: осьового, зовнішньго, третього, поля, октупольного, моменту, джерел, магнітометр, порядку, магнітного, вимірювання
Формула / Реферат:
Магнітометр третього порядку для вимірювання осьового октупольного моменту джерел зовнішнього магнітного поля, що містить магніточутливі датчики, які розташовані навколо вимірюваного джерела поля, який відрізняється тим, що він виконаний з дванадцяти датчиків, з яких вісім рівномірно розташовані на двох колах радіуса R, осі яких співпадають, а їх центри віддалені від центру вимірювального пристрою на координату ± z, яка пов'язана з радіусом R...
Датчик для вимірювання температури і магнітного поля
Номер патенту: 33148
Опубліковано: 15.02.2001
Автори: Ющук Степан Іванович, Венгер Евген Федорович, Прохорович Анатолій Вікторович, Варшава Славомир Степанович
МПК: G01K 7/00, H01L 43/00
Мітки: датчик, температури, магнітного, поля, вимірювання
Текст:
...Х-и,5 з питомим опором 5ии-Іши Омш контакти створені з привареного лудженого мідного дроту, закріпленого ІНДІЄМ. встановлено, що виготовлення чутливого елемента датчика а пресованого марганець-цинкового фериту даного складу І питомого опору *абе»~ печуе добру температурну чутливість датчика в Інтервалі U».,+IOU°C s коефіцієнтом тК0-£ 5&/R, а також його чутливість до магнітних полів s коефіцієнтом^^ Ом /тл дз Оскільки...
Спосіб вимірювання напруженості магнітного поля в локальних ділянках виробів із феромагнітних матеріалів
Номер патенту: 23040
Опубліковано: 10.05.2007
Автори: Бобрицький Віталій Миколайович, Барановський Денис Миколайович, Солових Євгеній Костянтинович, Аулін Віктор Васильович, Лисенко Сергій Володимирович, Жулай Олександр Юрійович
МПК: G01R 33/02
Мітки: матеріалів, спосіб, феромагнітних, локальних, ділянках, виробів, магнітного, поля, вимірювання, напруженості
Формула / Реферат:
Спосіб вимірювання напруженості магнітного поля в локальних ділянках виробів із феромагнітних матеріалів, що включає компенсацію тангенціальної складової напруженості їх магнітного поля магнітним полем струму в обмотці потенціалометра, один із полюсів якого здійснює періодичні коливання в межах локальної ділянки, який відрізняється тим, що забезпечують переміщення полюсів потенціалометра у напрямку, перпендикулярному до поверхні вимірювання,...
Датчик для вимірювання напруженості магнітного поля
Номер патенту: 33219
Опубліковано: 15.02.2001
Автори: Добріца Євген Леонідович, Серков Олександр Анатолійович, Гуйська Ганна Едвардівна, Ковальов Ігор Валерійович, Ефременко Любов Львовна
МПК: G01R 33/02
Мітки: датчик, магнітного, напруженості, поля, вимірювання
Текст:
...винаходу ЕЩІОЧЄЯ у тому, що виконання кожної вимірювальної котушки у вигляді відрізка екранованого кабелю що продовжує ВІДПОВІДНУ кабельну лінію передачі інформації, дає змогу залучити однаковіш хвильовий опір кабельної лінію передачі інформації та датчика чим досягається збільшення частотного діапазону виміру напруженості магнітного поля. На фіг. наведено датчик для вимірювання напруженості магнітного поля. Винахід містить дві...
Спосіб вимірювання напруженості магнітного поля і магнітометр для його здійснення
Номер патенту: 21185
Опубліковано: 28.02.2000
Автор: Скляр Ростислав Віталійович
МПК: G01R 33/02
Мітки: магнітометр, напруженості, здійснення, магнітного, спосіб, вимірювання, поля
Формула / Реферат:
1. Спосіб вимірювання напруженості магнітного поля, згідно з яким магнітне поле перетворюють в електричну напругу за допомогою приймальної котушки і обробляють отриманий сигнал, який відрізняється тим, що перетворення напруженості магнітного поля здійснюють при температурі оточуючого середовища, а попередню обробку сигналу проводять в умовах надпровідності. 2. Магнітометр для вимірювання напруженості магнітного поля, котрий...
Попередній патент: Система логічного енергетичного селективного захисту розгалужених електричних кіл
Наступний патент: Тієнопіримідиндіони і їх використання у модуляції аутоімунних хвороб
Випадковий патент: Спосіб прогнозування ефективності лікування ревматоїдного артриту