Система керування електродвигунами механізмів підйому/опускання фурм машини подачі кисню в конвертер
Номер патенту: 82909
Опубліковано: 27.08.2013
Автори: Ганин Михайло Павлович, Потапов Станіслав Валерійович, Цупіков Олександр Іванович, Дубенецький Олексій Степанович
Формула / Реферат
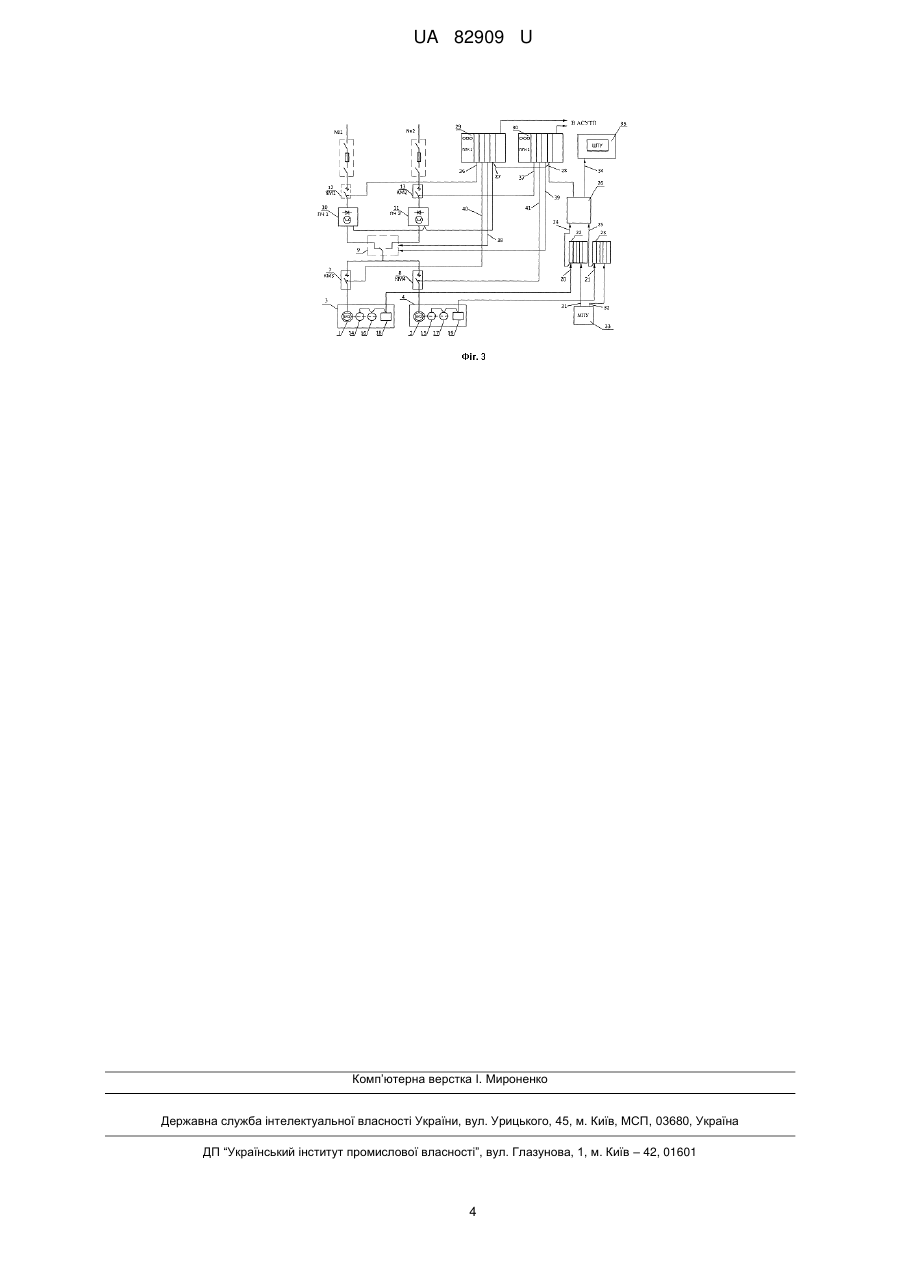
1. Система керування електродвигунами механізмів підйому/опускання фурм машини подачі кисню в конвертер, що містить два електричні кола, у кожному з яких електродвигуни з'єднані з перетворювачами за допомогою контакторів електродвигунів, підключених до перетворювачів за допомогою спільного для двох електричних кіл силового перемикача, а також щонайменше один програмований логічний контролер, підключений щонайменше до одного з електричних кіл, яка відрізняється тим, що до другого електричного кола підключено другий програмований логічний контролер, а механізми підйому/опускання фурм обладнані датчиками розташування та швидкості руху фурм і датчиками навантаження на канати, електрично з'єднаними із входами двох станцій вводу/виводу дискретних сигналів, виходи яких через повторювач мережі зв'язані із входами програмованих логічних контролерів, виходи яких з'єднані відповідно з магнітними пускачами, перетворювачами, силовим перемикачем та контакторами двох електричних кіл, утворюючи єдину інформаційну мережу.
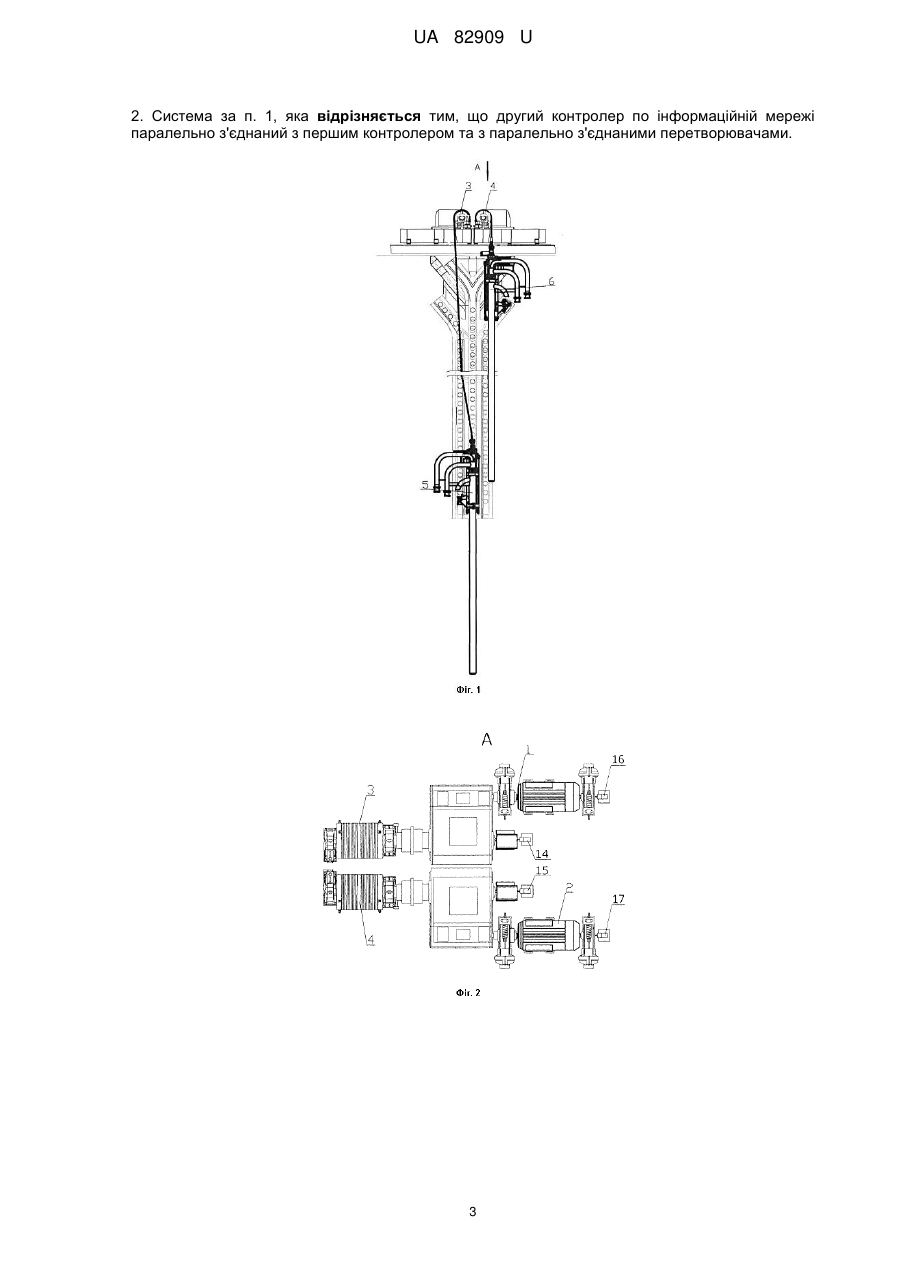
2. Система за п. 1, яка відрізняється тим, що другий контролер по інформаційній мережі паралельно з'єднаний з першим контролером та з паралельно з'єднаними перетворювачами.
Текст
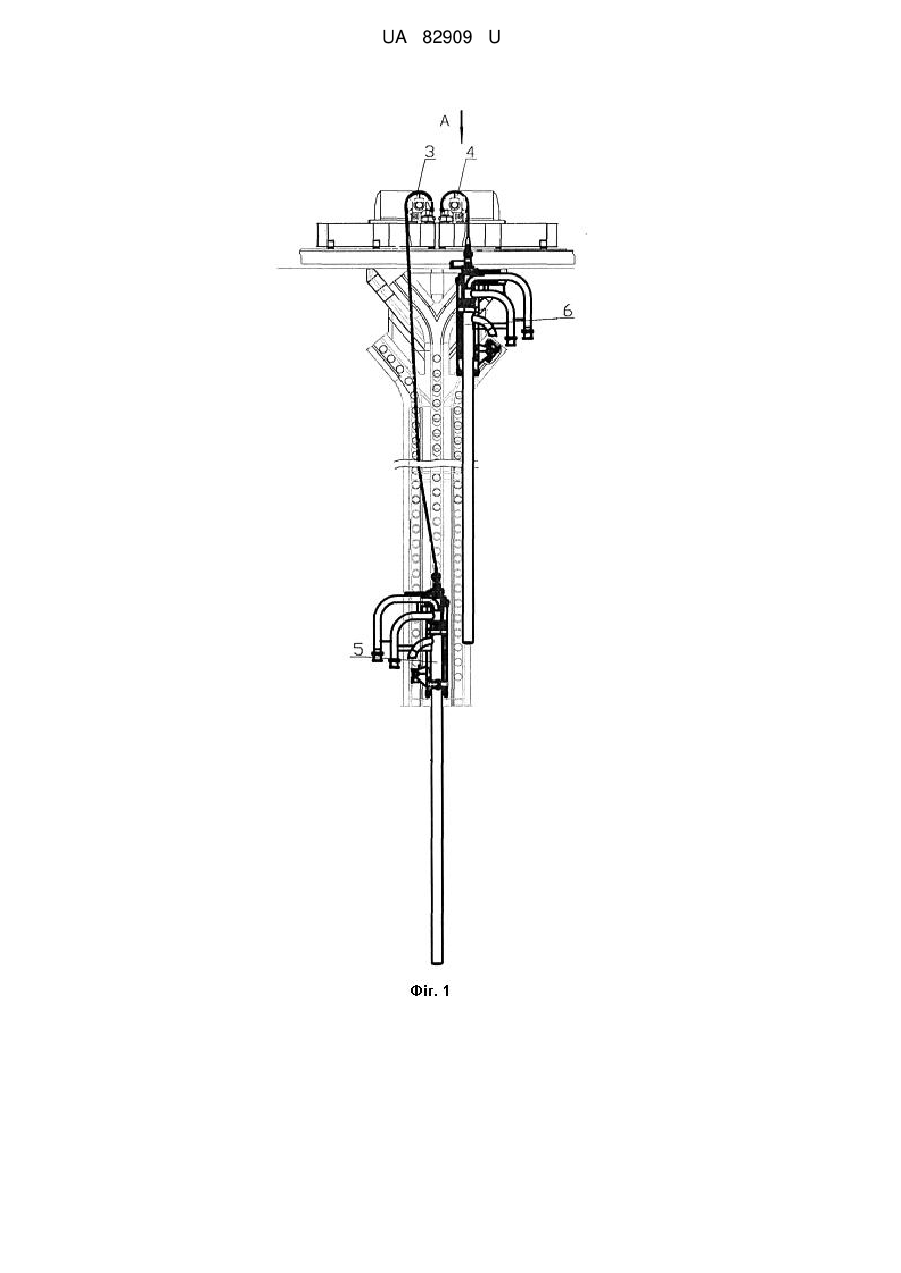
Реферат: Система керування електродвигунами механізмів підйому/опускання фурм машини подачі кисню в конвертер містить два електричні кола, у кожному з яких електродвигуни з'єднані з перетворювачами за допомогою контакторів електродвигунів, підключених до перетворювачів за допомогою спільного для двох електричних кіл силового перемикача, а також щонайменше один програмований логічний контролер, підключений щонайменше до одного з електричних кіл. До другого електричного кола підключено другий програмований логічний контролер, а механізми підйому/опускання фурм обладнані датчиками розташування та швидкості руху фурм і датчиками навантаження на канати, електрично з'єднаними із входами двох станцій вводу/виводу дискретних сигналів, виходи яких через повторювач мережі зв'язані із входами програмованих логічних контролерів, виходи яких з'єднані відповідно з магнітними пускачами, перетворювачами, силовим перемикачем та контакторами двох електричних кіл, утворюючи єдину інформаційну мережу. UA 82909 U (12) UA 82909 U UA 82909 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі керування електричними двигунами. Як прототип вибрана система керування електродвигунами механізмів підйому/опускання фурм машини подачі кисню в конвертер, що містить два електричні кола, у кожному з яких електродвигуни з'єднані з перетворювачами за допомогою контакторів електродвигунів, що підключені до перетворювачів за допомогою спільного для двох електричних кіл силового перемикача, а також щонайменше один програмований логічний контролер, підключений щонайменше до одного з електричних кіл (заявка України № u201209353 від 31.07.2012). Недоліком існуючої системи є його низька надійність, тому що при зникненні напруги, аварії контролера, обриву кабелю мережі керування електродвигуном робочого механізму до усунення несправностей не можливо пересування й вивід фурми з конвертера, що веде за собою порушення його роботи. В основу корисної моделі поставлена задача підвищення надійності системи шляхом забезпечення безперервного контролю робочих параметрів механізмів підйому/опускання фурм (розташування та швидкості руху фурм, а також навантаження на канати) і автоматичного перемикання керування рухом фурм із аварійного контролера на резервний. Поставлена задача вирішується тим, що в системі керування електродвигунами механізмів підйому/опускання фурм машини подачі кисню в конвертер, що містить два електричні кола, у кожному з яких електродвигуни з'єднані з перетворювачами за допомогою контакторів електродвигунів, підключених до перетворювачів за допомогою спільного для двох електричних кіл силового перемикача, а також щонайменше один програмований логічний контролер, підключений щонайменше до одного з електричних кіл, відповідно до корисної моделі, до другого електричного кола підключено другий програмований логічний контролер, а механізми підйому/опускання фурм обладнані датчиками розташування та швидкості руху фурм і датчиками навантаження на канати, електрично з'єднаними зі входами двох станцій вводу/виводу дискретних сигналів, виходи яких через повторювач мережі зв'язані зі входами програмованих логічних контролерів, виходи яких з'єднані відповідно з магнітними пускачами, перетворювачами, силовим перемикачем та контакторами двох електричних кіл, утворюючи єдину інформаційну мережу. При цьому другий контролер по інформаційній мережі паралельно з'єднаний з першим контролером та з паралельно з'єднаними перетворювачами. Доведено, що нова сукупність ознак є причиною, а набутий первинний технічний результат "забезпечення безперервного контролю параметрів (розташування та швидкості руху фурм, а також навантаження на канати) механізмів підйому/опускання фурм і автоматичного перемикання керування рухом фурм із аварійного контролера на резервний" - наслідком. У свою чергу цей первинний результат є причиною, а набутий вторинний технічний результат "підвищення надійності системи" - наслідком. Корисна модель пояснюється на прикладі її виконання з посиланням на прикладені креслення, на яких зображено: на фіг. 1 - загальний вигляд механізмів підйому/опускання фурм машини подачі кисню в конвертер; на фіг. 2 - те ж саме, вид А по фіг. 1; на фіг. 3 - структурна схема системи керування електродвигунами механізмів підйому/опускання фурм машини подачі кисню в конвертер. Запропонована система містить два електричні кола, у яких електродвигуни 1 (М1) і 2 (М2) змінного струму механізмів підйому/опускання 3 і 4 фурм 5 і 6 встановлені з можливістю позмінного перемикання через контактори 7 (КМ3) і 8 (KM4) за допомогою спільного силового перемикача 9 до перетворювачів частоти 10 (ПЧ1) або 11 (ПЧ2). Перетворювачі 10 (ПЧ1) і 11 (ПЧ2) підключені до мережі електропостачання змінного струму через енергонезалежні вводи № 1 і № 2 магнітними пускачами 12 (КМ1) і 13 (КМ2). Механізми підйому/опускання 3 і 4 фурм 5 і 6 обладнані датчиками положення фурм 14 і 15, датчиками швидкості руху фурм 16 і 17 та тензорезисторними датчиками навантаження на канати 18 і 19, електрично з'єднаними зі входами 20 і 21 двох станцій вводу/виводу дискретних сигналів 22 і 23, виходи 24 і 25 яких через повторювач мережі 26 зв'язані з модулями вводу/виводу інформації 27 і 28 програмованих логічних контролерів 29 (ПЛК1) і 30 (ПЛК2), що з'єднані між собою паралельно. До станцій 22 і 23 двома виходами 31 і 32 підключений місцевий пульт управління 33 (МПУ), а до повторювача мережі 26 - одним виходом 34 центральний пульт управління 35 (ЦПУ). Контролери 29 (ПЛК1) і 30 (ПЛК2) своїми виходами 36, 37, 38, 39, 40 і 41 відповідно з'єднані з магнітними пускачами 12 (КМ1) і 13 (КМ2), силовим перемикачем 9 і контакторами 7 (КМ3) і 8 (КМ4) двох електричних кіл електродвигунів 1 (М1) і 2 (М2), а модулі вводу/виводу інформації 27 і 28 паралельно з'єднані з паралельно з'єднаними перетворювачам частоти 10 (ПЧ1) і 11 (ПЧ2). Розглянемо роботу системи керування. При проведенні плавки перетворювач 10 (ПЧ1) або 11 (ПЧ2), підключений до електродвигуна 1 (М1) або 2 (М2), сприймає завдання від основного 1 UA 82909 U 5 10 15 20 25 30 35 40 програмованого логічного контролера 29 (ПЛК1) або 30 (ПЛК2). Контролери 29 (ПЛК1) або 30 (ПЛК2) одночасно сприймають команди від органів керування (на кресленні не показані), що встановлені на пультах 33 (МПУ) або 35 (ЦПУ). Для контролю розташування й швидкості підйому/опускання фурми на кожному механізмі 3 і 4 монтують по два датчики 14, 15 і 16, 17 абсолютних значень. Датчики в процесі пересування фурми надсилають сигнали в ПЛК1 29 і ПЛК2 30. Для контролю навантаження на канати на кожному механізмі підйому/опускання 3 і 4 встановлені тензорезисторні датчики 18 і 19, які через станції вводу/виводу 20 і 21 передають свої сигнали в ПЛК1 29 або ПЛК2 30. Перед початком роботи програмно один із двох програмованих логічних контролерів 29 (ПЛК1) або 30 (ПЛК2) вибирають як основний, другий при цьому автоматично переводиться в режим резервного. Із центрального пульта управління 35 (ЦПУ) обирають необхідний робочий механізм підйому/опускання фурм 3 або 4 і пульт управління 33 (МПУ) або 35 (ЦПУ), з якого буде здійснюватися керування. З пульта 33 або 35, з якого здійснюється керування, надсилають команди на рух фурми нагору або вниз. Сигнали з пульта 33 (МПУ) або 35 (ЦПУ) через станції вводу/виводу сигналів 22 і 23 по інформаційній мережі надходять у контролери 29 (ПЛК1) і 30 (ПЛК2). Останні обробляють сприйняті команди й, відповідно до заданої програми, що керує алгоритмом роботи, основний контролер 29 (ПЛК1) або 30 (ПЛК2) надсилає команду на робочий, тепер, перетворювач 10 (ПЧ1) або 11 (ПЧ2). Відбувається процес підйому/опускання однієї з фурм 5 або 6. У процесі роботи механізмів підйому/опускання фурм датчики 14, 16, 18 або 15, 17, 19 безупинно надсилають сигнали про розташування й швидкість руху фурм, і навантаження на канати. Ці сигнали про зазначені параметри від датчиків безупинно надсилаються по інформаційній мережі через повторювач мережі 26 у програмовані контролери 29 (ПЛК1) і 30 (ПЛК2). Контролери 29 (ПЛК1) і 30 (ПЛК2) безупинно контролюють розташування й швидкість руху фурм і навантаження на канати, відповідність роботи механізмів підйому/опускання 3 і 4 заданим командам, а також справність датчиків 14, 16, 18 і 15, 17, 19. При порушенні заданих параметрів працюючого механізму 3 або 4, або аваріях (несправності) датчиків і інформаційної мережі здійснюється зупинка робочої фурми, її вивід з конвертера й введення в роботу резервної фурми. При зникненні напруги електропостачання або аварії обраного робітником контролера 29 (ПЛК1) або 30 (ПЛК2), або аварії одного з датчиків 14, 16, 18 або 15, 17, 19, модулів вводу/виводу інформації 27 або 28 робочого механізму 3 або 4, навіть якщо в цьому випадку фурма була у конвертері, здійснюється автоматичне по заданій програмі або ручне, за допомогою силового перемикача 9, перемикання з робочого на резервний програмований логічний контролер 29 (ПЛК1) або 30 (ПЛК2). При цьому механізмами 3 або 4 у штатному режимі виконується рух на підйом або опускання фурми, не порушуючи процесу плавки. Так само у випадку обриву кабелю зв'язку із центрального пульта управління 35 (ЦПУ) і/або панеллю оператора можливий вивід фурми з конвертера при керуванні з місцевого пульта управління 33 (МПУ). При обриві кабелю зв'язку або аварії контролера 29 (ПЛК1) або 30 (ПЛК2) і датчиків 14, 16, 18 або 15, 17, 19 механізму 3 або 4 резервний робочий механізм 4 або 3 буде працювати в штатному режимі без обмеження функцій, що виконуються. При відмовах у роботі основного контролера 29 (ПЛК1) або 30 (ПЛК2), по заданій програмі автоматично здійснюється перемикання на резервний контролер 30 (ПЛК2) або 29 (ПЛК1), при цьому процес ведення плавки не порушується. 45 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 50 55 1. Система керування електродвигунами механізмів підйому/опускання фурм машини подачі кисню в конвертер, що містить два електричні кола, у кожному з яких електродвигуни з'єднані з перетворювачами за допомогою контакторів електродвигунів, підключених до перетворювачів за допомогою спільного для двох електричних кіл силового перемикача, а також щонайменше один програмований логічний контролер, підключений щонайменше до одного з електричних кіл, яка відрізняється тим, що до другого електричного кола підключено другий програмований логічний контролер, а механізми підйому/опускання фурм обладнані датчиками розташування та швидкості руху фурм і датчиками навантаження на канати, електрично з'єднаними із входами двох станцій вводу/виводу дискретних сигналів, виходи яких через повторювач мережі зв'язані із входами програмованих логічних контролерів, виходи яких з'єднані відповідно з магнітними пускачами, перетворювачами, силовим перемикачем та контакторами двох електричних кіл, утворюючи єдину інформаційну мережу. 2 UA 82909 U 2. Система за п. 1, яка відрізняється тим, що другий контролер по інформаційній мережі паралельно з'єднаний з першим контролером та з паралельно з'єднаними перетворювачами. 3 UA 82909 U Комп’ютерна верстка І. Мироненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюControl system of electric motors for tuyere lift/down mechanisms of machines for oxygen supply to converter
Автори англійськоюHanin Mykhailo Pavlovych, Tsupikov Oleksandr Ivanovych, Dubenetskyi Oleksii Stepanovych, Potapov Stanislav Valeriiovych
Назва патенту російськоюСистема управления электродвигателями механизмов подъема/опускания фурм машины подачи кислорода в конвертер
Автори російськоюГанин Михаил Павлович, Цупиков Александр Иванович, Дубенецкий Алексей Степанович, Потапов Станислав Валерьевич
МПК / Мітки
МПК: H02P 29/00
Мітки: машини, керування, конвертер, фурм, кисню, подачі, система, електродвигунами, механізмів
Код посилання
<a href="https://ua.patents.su/6-82909-sistema-keruvannya-elektrodvigunami-mekhanizmiv-pidjjomu-opuskannya-furm-mashini-podachi-kisnyu-v-konverter.html" target="_blank" rel="follow" title="База патентів України">Система керування електродвигунами механізмів підйому/опускання фурм машини подачі кисню в конвертер</a>
Система керування електродвигунами механізмів підйому/опускання фурм машини подачі кисню в конвертер
Номер патенту: 77699
Опубліковано: 25.02.2013
Автори: Потапов Станіслав Валерійович, Ганин Михайло Павлович, Дубенецький Олексій Степанович, Цупіков Олександр Іванович
МПК: H02P 29/00
Мітки: електродвигунами, фурм, конвертер, механізмів, кисню, керування, система, машини, подачі
Формула / Реферат:
1. Система керування електродвигунами механізмів підйому/опускання фурм машини подачі кисню в конвертер, що містить щонайменше два електричні кола, в кожному з яких електродвигуни сполучені з перетворювачами через контактори електродвигунів, яка відрізняється тим, що контактори електродвигунів підключені до перетворювачів через спільний для двох електричних кіл силовий перемикач.2. Система за п. 1, яка відрізняється тим, що в ній...
Машина подачі кисню в конвертер
Номер патенту: 1800
Опубліковано: 15.05.2003
Автори: Тімко Іван Васильович, Зайка Володимир Якович, Гаврилов Володимир Евгенович, Брук Олександр Семенович, Кузьмінов Анатолій Вікторович, Ларіонов Олександр Олексійович, Набоков Валерій Олександрович
МПК: C21C 5/46
Мітки: машина, подачі, конвертер, кисню
Формула / Реферат:
1. Машина подачі кисню в конвертер, що містить дві фурми, закріплені на каретках, розташованих на напрямних, пучок металорукавів для підведення кисню, підведення та відведення води, яка відрізняється тим, що машину обладнано площадками обслуговування фурм, причому одна площадка призначена для обслуговування однієї фурми, при цьому кожну площадку обслуговування встановлено з можливістю фіксованого повороту на жорстко закріпленій вертикальній...
Пристрій для керування електродвигунами перемінного струму приводів механізмів, наприклад, вантажопідйомних пристроїв
Номер патенту: 29043
Опубліковано: 10.01.2008
Автори: Таушанов Василь Георгійович, Васильченко Сергій Іванович, Токарев Валерій Веніамінович, Токарев Веніамін Петрович
МПК: B66C 13/22, H02P 1/00
Мітки: перемінного, струму, приводів, вантажопідйомних, пристрій, наприклад, пристроїв, механізмів, керування, електродвигунами
Формула / Реферат:
Пристрій для керування електродвигунами перемінного струму приводів механізмів, наприклад, вантажопідйомних пристроїв, що містить принаймні один прямоточний командоконтролер, який відрізняється тим, що послідовно з командоконтролером установлений контактор, що живиться від власного силового кола.
Пристрій для подачі кисню у конвертер
Номер патенту: 12236
Опубліковано: 25.12.1996
Автори: Кашкабаш Микола Іванович, Тарпіньян Дмитрій Апелович
МПК: C21C 5/46
Мітки: конвертер, кисню, подачі, пристрій
Формула / Реферат:
Устройство для подачи кислорода в конвертер, содержащее две фурмы, закрепленные в каретках, верхние катки которых размещены в общей направляющей дорожке, а нижние - в индивидуальных направляющих дорожках, имеющих наклонные участки в верхней части, отличающееся тем, что, с целью повышения надежности устройства каждая каретка снабжена упорными роликами, оси вращения которых перпендикулярны осям вращения катков, расположенными попарно на одном...
Пристрій для подачі кисню у конвертер
Номер патенту: 14042
Опубліковано: 25.04.1997
Автори: Майзус Ілля Борисович, Корженко Віктор Іванович, Тарпіньян Дмитрій Апелович
Мітки: пристрій, конвертер, кисню, подачі
Формула / Реферат:
1. Устройство для подачи кислорода в конвертер, содержащее фурмы, закрепленные в каретках, катки которых расположены в вертикальных направляющих дорожках, отличающееся тем, что, с целью повышения надежности устройства, каждая каретка снабжена фурмодержателем, установленным с возможностью перемещения относительно каретки и кинематически связанным с направляющей дорожкой.2. Устройство по п. 1, отличающееся тем, что кинематическая...