Пристрій для виміру поверхневої вологості


Формула / Реферат
1. Пристрій для виміру щонайменше одного параметра в сільськогосподарській робочій машині (2), яка містить щонайменше приймальний апарат (13) для приймання збираної зернової маси (14) і щонайменше один робочий орган (55) для обробки скошеної зернової маси (26), який відрізняється тим, що оснащений щонайменше одним встановленим на робочій машині (2) датчиком (15) точки роси для контролю оточуючого зернову масу (14, 26) повітря (16), причому датчик (15, 70-73) точки роси розташований у безпосередній близькості до збираної зернової маси (14) в приймальному апараті (13) і/або у безпосередній близькості до скошеної зернової маси (26) на робочому органі (55).
2. Пристрій за п. 1, який відрізняється тим, що датчик (15, 70-73) генерує сигнал (Т) точки роси залежно від частки сконденсованих з повітря (16) водяних парів (17).
3. Пристрій за п. 2, який відрізняється тим, що датчик (15, 70-73) з'єднаний з пристроєм (19) формування та індикації сигналів, який за сигналом (Т) точки роси обчислює та відображає температуру точки роси.
4. Пристрій за п. 1, який відрізняється тим, що виконаний з можливістю зміни оператором (56) сільськогосподарської робочої машини залежно від температури точки роси, що відображається на пристрої (19) формування та індикації сигналів, щонайменше одного робочого параметра щонайменше одного робочого органа (55) і/або щонайменше одного приймального апарата (13), і/або швидкості руху сільськогосподарської робочої машини (2).
5. Пристрій за п. 1, який відрізняється тим, що датчик (15, 70-73) з'єднаний з блоком керування (61), який змінює щонайменше один робочий параметр щонайменше одного робочого органа (55) і/або одного приймального апарата (13) сільськогосподарської робочої машини (2) залежно від сигналу (Т) точки роси, переданого від датчика (15, 70-73) на блок керування (61).
6. Пристрій за п. 5, який відрізняється тим, що блок керування (61) містить щонайменше одну графічну характеристику (69), з використанням якої регулюється щонайменше один робочий параметр машини.
7. Пристрій за пп. 1-6, який відрізняється тим, що сільськогосподарська робоча машина (2) виконана у вигляді зернозбирального комбайну (1) з приймальним апаратом (13), виконаним у вигляді жатки (12), причому декілька датчиків (15) точки роси встановлено на жатці (12) на різній висоті.
8. Пристрій за п. 7, який відрізняється тим, що жатка (12) з'єднана з блоком керування (61), причому блок керування (61) регулює висоту (18) жатки (12) залежно від сигналу (Т) точки роси.
9. Пристрій за п. 8, який відрізняється тим, що жатка (12) складається принаймні з мотовила (21) і платформи (20) жатки, оснащеної приймальним шнеком (27), причому блок керування (61) регулює принаймні число обертів (62) мотовила, і/або висоту (22) і відстань (23) мотовила (21) відносно платформи (20) жатки, і/або число обертів (63) приймального шнека (27) залежно від сигналу (Т) точки роси.
10. Пристрій за п. 5 або 6, який відрізняється тим, що зернозбиральний комбайн (1) оснащений принаймні регулятором (53) швидкості його руху, з'єднаним з блоком керування (61), причому блок керування (61) регулює принаймні швидкість (54) руху зернозбирального комбайна (1) залежно від сигналу (Т) точки роси.
11. Пристрій за п. 5 або 6, який відрізняється тим, що зернозбиральний комбайн (1) оснащений щонайменше одним молотильним апаратом (3), який утворений щонайменше одним молотильним барабаном (30), який частково охоплює його підбарабанням (31), а молотильний апарат (3) з'єднаний з блоком керування (61), причому блок керування (61) регулює принаймні число обертів (65) щонайменше одного молотильного барабана ( 30) і/або простір (32) щонайменше між одним підбарабанням (31) і молотильним барабаном (30) залежно від сигналу (Т) точки роси.
12. Пристрій за п. 5 або 6, який відрізняється тим, що зернозбиральний комбайн (1) оснащений щонайменше одним зерноочисним пристроєм (6), який складається щонайменше з одного решета (7, 8) і щонайменше одного вентилятора (9), та з'єднаний з блоком керування (61), причому блок керування (61) регулює принаймні відстані між двома вузлами сіткової чарунки (45, 46) щонайменше одного решета (7, 8) і число обертів (66) щонайменше одного вентилятора (9) і/або частоту коливань зерноочисного пристрою (6) залежно від сигналу (Т) точки роси.
13. Пристрій за п. 12, який відрізняється тим, що щонайменше один додатковий датчик (70) точки роси встановлений в зоні решіт (7, 8) зерноочисного пристрою (6).
14. Пристрій за п. 1, який відрізняється тим, що щонайменше один додатковий датчик (71) точки роси встановлений в зоні сепаруючого пристрою (5) зернозбирального комбайна (1).
15. Пристрій за п. 1, який відрізняється тим, що щонайменше один додатковий датчик (72) точки роси встановлений на приймальному каналі (10) зернозбирального комбайна (1).
16. Пристрій за п. 11, який відрізняється тим, що щонайменше один додатковий датчик (73) точки роси встановлений в зоні молотильного апарата (3) зернозбирального комбайна (1).
Текст
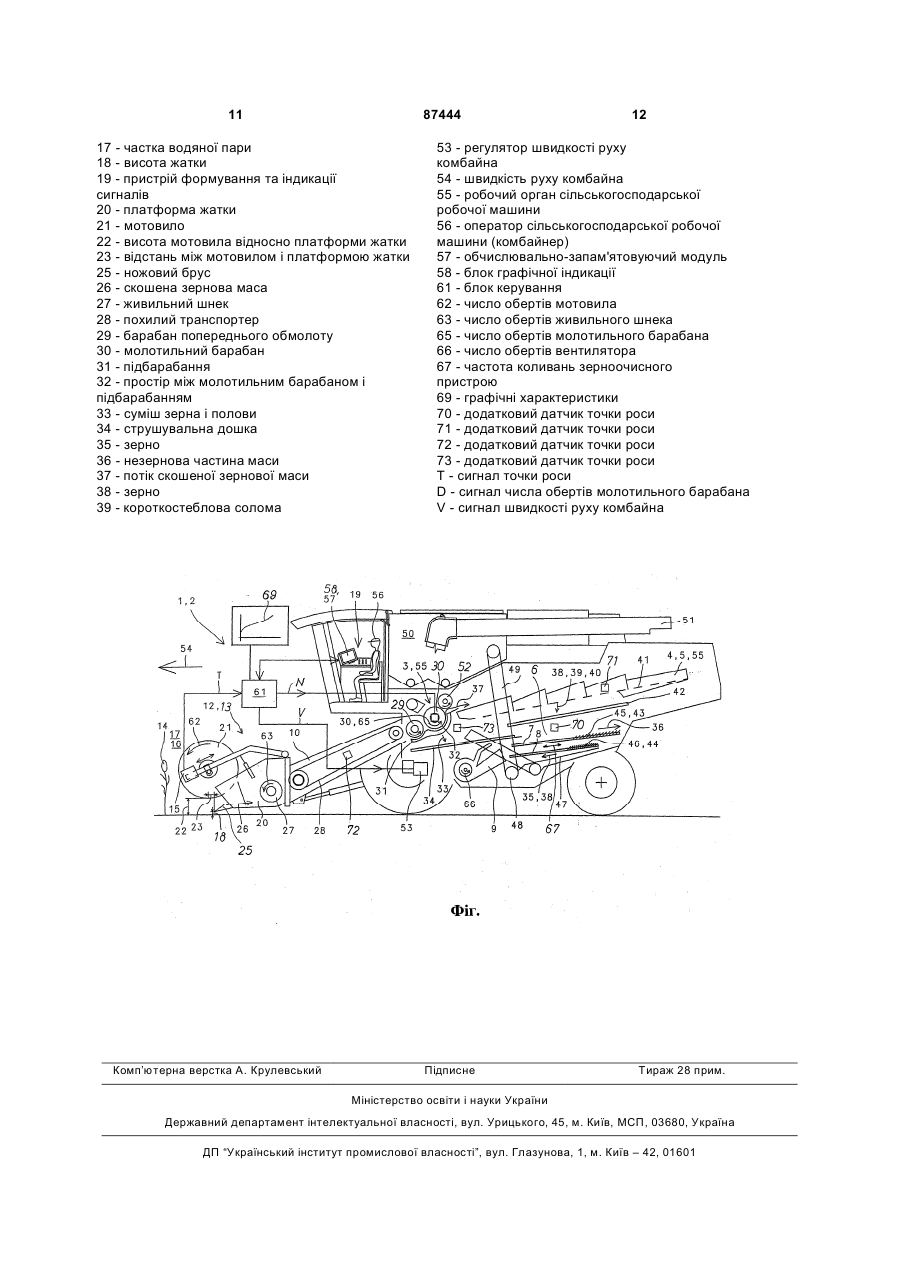
1. Пристрій для виміру щонайменше одного параметра в сільськогосподарській робочій машині (2), яка містить щонайменше приймальний апарат (13) для приймання збираної зернової маси (14) і щонайменше один робочий орган (55) для обробки скошеної зернової маси (26), який відрізняється тим, що оснащений щонайменше одним встановленим на робочій машині (2) датчиком (15) точки роси для контролю оточуючого зернову масу (14, 26) повітря (16), причому датчик (15, 70-73) точки роси розташований у безпосередній близькості до збираної зернової маси (14) в приймальному апараті (13) і/або у безпосередній близькості до скошеної зернової маси (26) на робочому органі (55). 2. Пристрій за п. 1, який відрізняється тим, що датчик (15, 70-73) генерує сигнал (Т) точки роси залежно від частки сконденсованих з повітря (16) водяних парів (17). 3. Пристрій за п. 2, який відрізняється тим, що датчик (15, 70-73) з'єднаний з пристроєм (19) формування та індикації сигналів, який за сигналом (Т) точки роси обчислює та відображає температуру точки роси. 4. Пристрій за п. 1, який відрізняється тим, що виконаний з можливістю зміни оператором (56) сільськогосподарської робочої машини залежно від температури точки роси, що відображається на пристрої (19) формування та індикації сигналів, щонайменше одного робочого параметра щонайменше одного робочого органа (55) і/або щонайменше одного приймального апарата (13), і/або 2 (19) 1 3 87444 4 керування (61) регулює принаймні число обертів (65) щонайменше одного молотильного барабана ( 30) і/або простір (32) щонайменше між одним підбарабанням (31) і молотильним барабаном (30) залежно від сигналу (Т) точки роси. 12. Пристрій за п. 5 або 6, який відрізняється тим, що зернозбиральний комбайн (1) оснащений щонайменше одним зерноочисним пристроєм (6), який складається щонайменше з одного решета (7, 8) і щонайменше одного вентилятора (9), та з'єднаний з блоком керування (61), причому блок керування (61) регулює принаймні відстані між двома вузлами сіткової чарунки (45, 46) щонайменше одного решета (7, 8) і число обертів (66) щонайменше одного вентилятора (9) і/або частоту коливань зерноочисного пристрою (6) залежно від сигналу (Т) точки роси. 13. Пристрій за п. 12, який відрізняється тим, що щонайменше один додатковий датчик (70) точки роси встановлений в зоні решіт (7, 8) зерноочисного пристрою (6). 14. Пристрій за п. 1, який відрізняється тим, що щонайменше один додатковий датчик (71) точки роси встановлений в зоні сепаруючого пристрою (5) зернозбирального комбайна (1). 15. Пристрій за п. 1, який відрізняється тим, що щонайменше один додатковий датчик (72) точки роси встановлений на приймальному каналі (10) зернозбирального комбайна (1). 16. Пристрій за п. 11, який відрізняється тим, що щонайменше один додатковий датчик (73) точки роси встановлений в зоні молотильного апарата (3) зернозбирального комбайна (1). Винахід належить до вимірювального пристрою згідно з обмежувальною частиною п. 1 формули. З попереднього рівня техніки відомо безліч вимірювальних пристроїв, за допомогою яких контролюють робочі параметри робочих органів сільськогосподарських машин, потік маси, що збирається робочою машиною, або властивості збираної маси. З EP 0303899 В1 відомий пристрій для виміру параметрів збираної зернової маси, в якому обчислювальний пристрій розраховує масу збираного зерна за його объемом і твердістю. При цьому маса збираного зерна вимірюється датчиком рівня, контролюючим вміст контейнера зі збираною масою. Твердість збираної маси запам'ятовується в обчислювальному пристрої, причому визначення відповідної збираній масі твердості запам'ятовується залежно від її вологості, яка визначається або у цьому пристрої, або оператором сільськогосподарської робочої машини, або за допомогою датчиків. До цього часу вологість зовнішнього повітря сприймається оператором сільськогосподарської робочої машини, коли вона візуально помітна на полі у вигляді димки або туману, або, у випадку робочої машини без кабіни, - безпосередньо сприймається оператором машини у вигляді вологи чи холоду. Крім того, операторам сільськогосподарських робочих машин відомо, що наприкінці дня зниження температури повітря обумовлює підвищення відносної його вологості. При досягненні точки роси вода конденсується на поверхні збираної маси, що призводить до погіршення умов збирання врожаю та погіршення якості збираної маси. Досвідчений оператор сільськогосподарської робочої машини підстроює робочі параметри машини до умов, що змінюються. Відомі вимірювальні пристрої мають той недолік, що вони контролюють вологість збираного зерна і не контролюють вологість на поверхні збираної маси. Вологість на поверхні збираної маси досі не враховується при встановленні робочих параметрів робочих органів сільськогосподарських робочих машин і/або їхніх приймальних апаратів. В основу винаходу поставлена задача створення пристрою для виміру поверхневої вологості збираної зернової маси, який був би здатний завчасно сприймати умови, що змінюються, збирання врожаю і своєчасно підстроювати до них робочі параметри сільськогосподарської робочої машини. Поставлена задача вирішується ознаками пункту 1 формули винаходу. Інші переважні форми виконання предмету винаходу подані в залежних пунктах формули. При цьому сільськогосподарська робоча машина оснащена щонайменше одним датчиком точки роси для контролю вологості оточуючого збирану масу повітря, здатним контролювати частку сконденсованих з повітря водяних парів. Розташування датчика точки роси у безпосередній близькості від збираної маси на приймальному апараті і/або у безпосередній близькості від неї на робочому органі дозволяє реєструвати генерований датчиком точки роси сигнал точки роси, що являє собою вологість на поверхні збираної маси і/або на поверхні робочого органа машини. Для контролю вологи, що конденсується на поверхні збираної маси, датчик точки роси генерує сигнал точки роси залежно від частки сконденсованих з повітря парів води. Найбільш переважна форма виконання винаходу передбачає зв'язок датчика точки роси з пристроєм формування та індикації сигналів, який за сигналом точки роси обчислює і відображає температуру точки роси, завдяки чому оператор сільськогосподарської робочої машини може спостерігати виміряну цим датчиком величину. Найбільш економічна форма виконання винаходу передбачає можливість зміни оператором сільськогосподарської робочої машини встановлення щонайменше одного робочого параметра щонайменше одного робочого органа і/або щонайменше одного приймального апарата і/або швидкості руху сільськогосподарської робочої машини залежно від температури точки роси, що 5 відображається на пристрої формування та індикації сигналів. Для забезпечення можливості повністю автоматичного регулювання робочих параметрів сільськогосподарської робочої машини найбільш доцільно з'єднувати датчик точки роси з блоком керування, який змінює один або декілька робочих параметрів щонайменше одного робочого органа і/або щонайменше одного приймального апарата сільськогосподарської робочої машини залежно від сигналу точки роси, що передається на блок керування від датчика точки роси. Блок керування переважно містить щонайменше одну графічну характеристику, за допомогою якої регулюється щонайменше один робочий параметр. Таким чином робочі параметри встановлюються без участі оператора сільськогосподарської робочої машини. Виконання сільськогосподарської робочої машини у вигляді самохідного зернозбирального комбайна з приймальним апаратом у вигляді жатки і встановлення на цій жатці на різній висоті декількох датчиків точки роси забезпечує можливість контролю повітря на різній висоті в зоні скошуваної зернової маси. Особливо переважна форма виконання винаходу передбачає зв'язок жатки з блоком керування, регулюючим висоту жатки залежно від сигналу точки роси, що забезпечує встановлення висоти жатки з урахуванням поверхневої вологості скошуваної зернової маси. Переважна форма виконання винаходу передбачає оснащення зернозбирального комбайна принаймні регулятором швидкості його руху, з'єднаним з блоком керування, причому блок керування регулює швидкість руху комбайна у процесі збирання зернової маси залежно від сигналу точки роси, так що швидкість руху комбайна підганяється до поверхневої вологості збираної зернової маси. Інша форма виконання винаходу передбачає оснащення зернозбирального комбайна щонайменше одним молотильним апаратом з одним молотильним барабаном і щонайменше одним підбарабанням, а також зв'язок молотильного апарата з блоком керування, регулюючим число обертів щонайменше одного молотильного барабана і/або величину простору щонайменше між одним підбарабанням і одним молотильним барабаном залежно від сигналу точки роси, що забезпечує встановлення оптимальних робочих параметрів молотильного апарата залежно від виміряних значень поверхневої вологості збираної зернової маси. Оснащення зернозбирального комбайна щонайменше одним зерноочисним пристроєм, що містить щонайменше одне решето і щонайменше один вентилятор, а також зв'язок зерноочисного пристрою з блоком керування, регулюючим принаймні відстані між двома вузлами сіткової чарунки щонайменше одного решета, і/або число обертів щонайменше одного вентилятора, і/або частоту коливань зерноочисного пристрою залежно від сигналу точки роси, забезпечує можливість вибору робочих параметрів комбайна з урахуванням по 87444 6 верхневої вологості збираної зернової маси. Для контролю поверхневої вологості суміші, що подається до зерноочисного пристрою, яка складається із зерна, короткостеблової соломи і полови, в зоні решета зерноочисного пристрою встановлений щонайменше один додатковий датчик точки роси. Переважна форма виконання винаходу передбачає встановлення додаткового датчика точки роси в зоні сепаруючого пристрою зернозбирального комбайна, що дозволяє контролювати поверхневу вологість потоку транспортованої до клавішного соломотряса збираної маси, що складається з обмолочених стебел. Для забезпечення можливості контролю поверхневої вологості збираної зернової маси датчик точки роси встановлений у приймальному каналі зернозбирального комбайна. Також доцільно встановлювати додатковий датчик точки роси в зоні молотильного апарата, що дозволяє контролювати поверхневу вологість суміші зерна і полови, відокремлюваної на підбарабанні. Інші переважні форми виконання винаходу є предметом інших залежних пунктів формули і пояснюються нижче на прикладі виконання винаходу з посиланнями на креслення, де на Фіг.1 подана схема зернозбирального комбайна, вигляд збоку в поперечному розрізі. На Фіг. подано виконану у вигляді самохідного зернозбирального комбайна 1 сільськогосподарську робочу машину 2 у процесі збирання зернової маси. У цьому прикладі виконання винаходу йдеться про зернозбиральний комбайн 1 з так званим тангенціальним молотильним пристроєм 3 і з розташованим за ним клавішним соломотрясом 4, що виконує функцію сепаруючого пристрою 5. Під клавішним соломотрясом 4 розміщений зерноочисний пристрій 6, що складається з двох розташованих один над одним решіт 7, 8, які приводяться, як правило, в коливальний рух, і вентилятор 9. У передній частині комбайна 1 розташований поворотний у вертикальному напрямку живильний канал 10, на якому розміщений виконаний у вигляді жатки 12 приймальний апарат 13. За допомогою поворотного живильного каналу 10 встановлюють потрібну висоту 18 жатки 12. У безпосередній близькості до збираної зернової маси 14 на жатці 12 розташований запропонований датчик 15 точки роси для виміру вологості повітря 16, оточуючого збирану зернову масу 14. Датчик 15 контролює частку конденсованої з повітря 16 води 17 і залежно від її величини генерує сигнал T точки роси, пропорційний вологості на поверхні збираної зернової маси 14, який передається на ще не описаний пристрій 19 формування та індикації сигналів. Не виходить за рамки винаходу можливість встановлення на жатці 12 на різній висоті декількох датчиків 15 точки роси. Жатка 12 складається з платформи 20 і мотовила 21, встановленого з можливістю обертання на платформі 20 і обладнаного приводом цього обертання. Висота 22 мотовила 21 та його відстань у горизонтальному напрямку відносно плат 7 форми 20 жатки є змінними. Збирана зернова маса 14 скошується розташованим на передній кромці платформи 20 осцилуючим ножовим брусом 25, і відразу після цього скошена зернова маса 26 подається за допомогою мотовила 21 до живильного шнека 27, розташованого з можливістю обертання на платформі 20 жатки і оснащеного приводом цього обертання. Шнек 27 подає скошену зернову масу в живильний канал 10. У живильному каналі 10 рухається похилий транспортер 28, який передає зернову масу 26 на молотильні органи 29, 30, 31 молотильного апарата 3. Зернова маса 26, що надходить з похилого транспортера, захоплюється привідним обертовим барабаном 29 попереднього обмолоту і потім затягується привідним обертовим молотильним барабаном 30 через регульований молотильний простір 32 між барабаном 30 і підбарабанням 31. При цьому барабан 30 механічно обробляє зернову масу 26, внаслідок чого на підбарабанні 31 відокремлюється суміш 33 зерна і полова, яка по струшувальній дошці 34 підводиться до зерноочисного пристрою 6 для відокремлення зерна 35 від незернової частини 36, тобто від стебельчастої маси і полови. З молотильного апарата 3 маса, що складається в основному з обмолочених стебел, потрапляє через поворотний барабан 32, що обертається проти годинникової стрілки, на виконаний у вигляді клавішного соломотряса 4 сепаруючий пристрій 5, який переміщає потік 37 зернової маси в задню зону комбайна 1. При цьому відокремлюються зерна 38, що все ще знаходяться в потоці 37, з можливою домішкою короткостеблової соломи 39 і полова 40, які проходять через виконаний з ситовими отворами 41 клавішний соломотряс 4 і падають на зворотну дошку 42. Не виходить за рамки винаходу можливість заміни молотильних органів 29, 30, 31 і/або сепаруючого пристрою 5 на відомі і тому не описувані тут обертові молотильні і/або сепаруючі ротори. Зерно 38, короткостеблова солома 39 і полова 40 переміщаються по зворотній дошці 42 до струшувальної дошки 34 і потрапляють по зворотній дошці 42 в зерноочисний пристрій 6, в якому зерно 38 відділяється від короткостеблової соломи 39 і полови 40. Це відбувається завдяки тому, що через отвори 43, 44 у верхньому 7 і нижньому 8 решетах продувається створюваний вентилятором 9 повітряний потік, який розпушує зернову масу 26, що подається через решета 7, 8 в задню зону комбайна 1, забезпечуючи ми тим самим видалення більш легкої складової зернової маси - короткостеблової соломи 39 і полови 40, тоді як більш важка зернова складова 38 падає вниз через отвори 43, 44 в решетах 7, 8. Решета 7, 8 частково перекривають один одного, так що маса 26 піддається решітному сортуванню з різною тонкістю, причому відстані між двома вузлами сіткової чарунки 45, 46 решіт 7, 8 є регульованими. Регулювання відстаней між двома вузлами сіткової чарунки 45, 46 і/або числа обертів вентилятора 9 дозволяє регулювати частку зернової маси, яка проходить крізь отвори 43, 44, тобто так званий продукт, що проходить через решета, і частку маси, яка проходить по решету, тобто так званий надрешітний або 87444 8 східний продукт. Точно так само на так званий ступінь очищення можна впливати зміною частоти коливань 67 зерноочисного пристрою 6. Зерно 38, що проходить через обидва решета 7, 8 зерноочисного пристрою 6, падає на похилу уловлювальну і напрямну дошку 47 і зсипається по ній у шнековий зерновий транспортер 48, який подає його в зерновий елеватор 49. Зерновий елеватор 49 подає це зерно в зерновий бункер 50 комбайна 1, звідки воно у міру необхідності може вивантажуватися за допомогою вивантажувального транспортера 51 на транспортний візок. Згідно з попередніми формами виконання винаходу молотильний апарат 3, клавішний соломотряс 4 і зерноочисний пристрій утворюють робочі органи 55 комбайна 1. Зернозбиральний комбайн 1 додатково оснащений відомим і тому більш детально не описаним регулятором 53 швидкості комбайна, автоматично регулюючим цю швидкість залежно від параметра зернової маси. Пониження зовнішньої температури призводить до конденсації на зерновій масі 14 деякої частки водяної пари 17, присутньої у повітрі 16. Поверхнева вологість зернової маси 14 обумовлює часткове злипання скошеної зернової маси 26 або ж часткове налипання її на робочих органах 55. В результаті цього знижується сепаруюча і очисна ефективність робочих органів, через що знижується якість зернової маси 26. Для запобігання цьому недоліку і збереження постійності якості зернової маси 26 при змінних умовах збирання врожаю враховують поверхневу вологість цієї маси при виборі ще не описаного робочого параметра комбайна. Згаданий раніше пристрій 19 формування та індикації сигналів містить обчислювально-запам'ятовуючий модуль 57, а також блок 58 графічної індикації. Сигнали T точки роси, що передаються відомим способом від датчика 15 точки роси на пристрій 19 формування та індикації сигналів, перетворюються обчислювальнозапам'ятовуючим модулем 57 в температуру точки роси і відображаються блоком 58 графічної індикації. Залежно від температури точки роси, показаної на блоці 58 графічної індикації, комбайнер 56 змінює встановлення одного або декількох робочих параметрів одного або декількох робочих органів 55, і/або одного або декількох приймальних апаратів 13, і/або швидкість виконаної у вигляді зернозбирального комбайна 1 сільськогосподарської робочої машини 2. При збільшенні поверхневої вологості зернової маси 14 комбайнер для підвищення ефективності обмолоту збільшує число обертів 65 молотильного барабана і одночасно зменшує простір 32 між молотильним барабаном і підбарабанням. Крім того, для забезпечення перевищення відвіювання легкої складової зернової маси над просіванням важкої її складової на зерноочисному пристрої 6 комбайнер зменшує відстані 45, 46 між двома вузлами сіткової чарунки решіт 7, 8 і збільшує число обертів 66 вентилятора. Якщо якість зернової маси, не зважаючи на зміну вищеназваних робочих параметрів на молотильному апараті 3 і зерноочисному пристрої 6, не 9 підвищується, то для зниження витрати зернової маси через комбайн комбайнер зменшує швидкість руху 54 комбайна. Для забезпечення можливості повністю автоматизованого регулювання одного або декількох робочих параметрів комбайна залежно від вимірюваних сигналів T точки роси, згідно з винаходом, пристрій 19 формування та індикації сигналів обладнаний блоком керування 61, з'єднаним щонайменше з одним робочим органом 55 і/або щонайменше з одним приймальним апаратом 13 комбайна. Блок керування 61 містить декілька графічних характеристик 69, з використанням яких регулюють різні робочі параметри комбайна. Блок керування 61 оцінює сигнал Т, що надходить від датчика 15 точки роси, потім залежно від цього обирає з графічних характеристик 69 команду керування і передає її на робочі органи 55, і/або на приймальний апарат 13, і/або на регулятор 53 швидкості руху комбайна. За допомогою блока керування 61 можна, наприклад, відомим способом регулювати робочі параметри жатки 12. До таких параметрів належать висота 18 жатки, висота 22 і відстань 23 мотовила відносно платформи 20 жатки, число обертів 62 мотовила і число обертів 63 приймального шнека. Блок керування 61 може також регулювати робочі параметри молотильного апарата 3. До таких параметрів належать, наприклад, число обертів 65 молотильного барабана і ширина простору 32 між молотильним барабаном 30 та підбарабанням 31. Блок керування 61 формує також залежно від сигналу T точки роси сигнал D числа обертів молотильного барабана, яким регулюється число обертів останнього. При підвищенні поверхневої вологості збираної зернової маси 14 блок керування 61, наприклад, збільшує число обертів D молотильного барабана і одночасно зменшує простір 32 між молотильним барабаном і підбарабанням. Крім того, блок керування 61 може регулювати робочі параметри зерноочисного пристрою 6, до яких належать число обертів 66 вентилятора і відстані 45, 46 між двома вузлами сіткової чарунки решіт 7, 8. При збільшенні поверхневої вологості збираної зернової маси 14 блок керування 61 зменшує відстані 43, 46 між двома вузлами сіткової чарунки решіт 7, 8 і одночасно збільшує число 1 - зернозбиральний комбайн 2 - сільськогосподарська робоча машина 3 - молотильний апарат 4 - клавішний соломотряс 5 - сепаруючий пристрій 6 - зерноочисний пристрій 7 - решето 8 - решето 9 - вентилятор 10 - живильний канал 12 - жатка 13 - приймальний апарат 14 - збирана зернова маса 15 - датчик точки роси 16 - повітря 87444 10 обертів 66 вентилятора. І, нарешті, блок керування 61 може бути з'єднаний з регулятором 53 швидкості руху комбайна. Для цього він формує залежно від сигналу T точки роси сигнал V швидкості руху 54 комбайна. Блок керування 61 зменшує швидкість руху 54 комбайна при підвищенні поверхневої вологості збираної зернової маси 14. На різних робочих органах 55 зернозбирального комбайна 1 можуть бути встановлені додаткові датчики 70, 71, 72, 73 точки роси, які можуть реєструвати зміну і розподіл поверхневої вологості зернової маси на її шляху через комбайн 1 і за рахунок цього показувати, на яких робочих органах 55 доцільно встановлювати робочі параметри залежно від поверхневої вологості зернової маси 14, 26. З цією метою додатковий датчик 72 точки роси у приймальному каналі 10 комбайна 1 може реєструвати поверхневу вологість збираної зернової маси 14. Разом з цим, датчик 73 точки роси в зоні молотильного апарата 3 може реєструвати поверхневу вологість суміші зерна і полови 33, відокремлюваної на підбарабанні 31. Доцільно також розташовувати в зоні сепаруючого пристрою 5 додатковий датчик 71 точки роси, який реєструє поверхневу вологість потоку 37 зернової маси, що переміщується по клавішному соломотрясу 4 і складається в основному з соломи. Для реєстрації поверхневої вологості суміші, що подається до зерноочисного пристрою 6, яка складається із зерна 38, короткостеблової соломи 39 і полови 40, в зоні решіт 7, 8 зерноочисного пристрою 6 встановлений додатковий датчик 70 точки роси. Кожний з додаткових датчиків 70, 71, 72, 73 працює за принципом, аналогічним принципу роботи описаного раніше датчика 15 точки роси, розташованого в приймальному апараті 13. Не виходить за рамки винаходу можливість використання запропонованих датчиків точки роси з досягненням того ж самого, що й в описаному зернозбиральному комбайні, результату також на різних інших сільськогосподарських робочих машинах, наприклад, на тюкових пресах. Таблиця позицій елементів на кресленнях 40 - полова 41 - отвори в решеті 42 - зворотна дошка 43 - отвори в решеті 44 - отвори в решеті 45 - відстані між двома вузлами сіткової чарунки решіт 46 - відстань між двома вузлами сіткової чарунки решіт 47 - напрямна дошка 48 - шнековий зерновий транспортер 49 - зерновий елеватор 50 - зерновий бункер 51 - вивантажувальна труба зернового бункера 52 - поворотний барабан 11 87444 17 - частка водяної пари 18 - висота жатки 19 - пристрій формування та індикації сигналів 20 - платформа жатки 21 - мотовило 22 - висота мотовила відносно платформи жатки 23 - відстань між мотовилом і платформою жатки 25 - ножовий брус 26 - скошена зернова маса 27 - живильний шнек 28 - похилий транспортер 29 - барабан попереднього обмолоту 30 - молотильний барабан 31 - підбарабання 32 - простір між молотильним барабаном і підбарабанням 33 - суміш зерна і полови 34 - струшувальна дошка 35 - зерно 36 - незернова частина маси 37 - потік скошеної зернової маси 38 - зерно 39 - короткостеблова солома Комп’ютерна верстка А. Крулевський 12 53 - регулятор швидкості руху комбайна 54 - швидкість руху комбайна 55 - робочий орган сільськогосподарської робочої машини 56 - оператор сільськогосподарської робочої машини (комбайнер) 57 - обчислювально-запам'ятовуючий модуль 58 - блок графічної індикації 61 - блок керування 62 - число обертів мотовила 63 - число обертів живильного шнека 65 - число обертів молотильного барабана 66 - число обертів вентилятора 67 - частота коливань зерноочисного пристрою 69 - графічні характеристики 70 - додатковий датчик точки роси 71 - додатковий датчик точки роси 72 - додатковий датчик точки роси 73 - додатковий датчик точки роси T - сигнал точки роси D - сигнал числа обертів молотильного барабана V - сигнал швидкості руху комбайна Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for measuring superficial humidity
Автори англійськоюDammann Ludwig, Gunnar Quincke
Назва патенту російськоюУстройство для измерения поверхностной влажности
Автори російськоюДамман Людвиг, Гуннар Квинке
МПК / Мітки
МПК: A01D 41/127
Мітки: поверхневої, виміру, пристрій, вологості
Код посилання
<a href="https://ua.patents.su/6-87444-pristrijj-dlya-vimiru-poverkhnevo-vologosti.html" target="_blank" rel="follow" title="База патентів України">Пристрій для виміру поверхневої вологості</a>
Пристрій для контролю поверхневої вологості матеріалів

Номер патенту: 66563
Опубліковано: 17.05.2004
Автори: Супрун Наталія Петрівна, Скрипник Юрій Олексійович, Суглоба Маргарита Олександрівна, Курко Владимир Романович
МПК: G01N 27/12
Мітки: вологості, поверхневої, матеріалів, пристрій, контролю
Формула / Реферат:
Пристрій для контролю поверхневої вологості матеріалу, що містить вимірювальний і опорний електроди пробника, в якому опорний електрод з'єднаний з входом блока опорних резисторів та одним із входів диференційного підсилювача, смуговий підсилювач змінних напруг і квадратичний детектор, які послідовно з'єднані з виходом диференційного підсилювача, та вимірювальний прилад, який відрізняється тим, що в нього введені автоматичний перемикач,...
Пристрій для контролю поверхневої вологості матеріалу
Номер патенту: 23115
Опубліковано: 10.05.2007
Автори: Холоденко Вероніка Миколаївна, Скрипник Юрій Олексійович
МПК: G01N 33/00
Мітки: контролю, матеріалу, поверхневої, пристрій, вологості
Формула / Реферат:
Пристрій для контролю поверхневої вологості матеріалів, що містить вимірювальний та опорний електроди пробника, автоматичний перемикач, один вхід якого з'єднаний з вимірювальним електродом пробника, вихід через перший розділовий конденсатор з'єднаний з одним входом диференціального підсилювача, другий вхід якого через другий розділовий конденсатор з'єднаний з опорним електродом пробника, до виходу диференціального підсилювача підключені...
Напівпровідниковий пристрій для виміру вологості
Номер патенту: 46483
Опубліковано: 15.05.2002
Автори: Осадчук Олександр Володимирович, Крилик Людмила Вікторівна, Осадчук Володимир Степанович
МПК: G01N 27/22
Мітки: вологості, виміру, пристрій, напівпровідниковий
Формула / Реферат:
Напівпровідниковий пристрій для виміру вологості, який містить вологочутливий резистор, який відрізняється тим, що в нього введені другий вологочутливий резистор, біполярний і польовий транзистори, індуктивність, ємність і два джерела постійної напруги, причому перший полюс першого джерела постійної напруги з'єднаний з першим виводом першого вологочутливого резистора, а другий вивід першого вологочутливого резистора підключений до бази...
Мікроелектронний пристрій для виміру вологості
Номер патенту: 43044
Опубліковано: 15.11.2001
Автори: Осадчук Олександр Володимирович, Осадчук Володимир Степанович
МПК: G01N 25/56
Мітки: вологості, виміру, мікроелектронний, пристрій
Формула / Реферат:
Мікроелектронний пристрій для виміру вологості, який містить два вологочутливих польових транзистори і джерело постійної напруги, який відрізняється тим, що введені два резистори, ємність, третій вологочутливий польовий транзистор і друге джерело постійної напруги, причому перший полюс першого джерела постійної напруги з'єднаний з першим виводом першого резистора, а другий вивід першого резистора з'єднаний із затвором першого вологочутливого...
Спосіб диелькометричного виміру вологості сипучих матеріалів і пристрій для його здійснення
Номер патенту: 48438
Опубліковано: 15.08.2002
Автор: Занько Сергій Миколайович
МПК: G01N 27/00, G01N 27/22
Мітки: здійснення, сипучих, пристрій, диелькометричного, вологості, спосіб, матеріалів, виміру
Формула / Реферат:
1. Спосіб диелькометричного виміру вологості сипучих матеріалів, що полягає у вимірі діелектричної проникності двофазного міжелектродного середовища, що складається з досліджуваного сипучого матеріалу і газоповітряного наповнювача при...