Система кермового управління (варіанти) та перетворювальний пристрій в системі кермового управління
Формула / Реферат
1. Система кермового управління, що має ручний та автоматичний режими кермового управління, для вибіркового кермового управління керованими колесами позашляхового транспортного засобу з використанням управляючого сигналу з місця, віддаленого від зазначеного транспортного засобу, причому зазначена система кермового управління містить:
пристрій ручного кермового управління для переміщення керованих коліс водієм у ручному режимі, причому зазначений пристрій ручного кермового управління включає обід кермового колеса, з'єднаний з обертовим валом для руху разом із цим валом в обох режимах управління - і в ручному, і в автоматичному;
двигун, який виконаний з можливістю управління процесором;
шківний пристрій, з'єднаний з зазначеним валом у місці на відстані від зазначеного обода;
передачу, що з'єднує зазначений двигун із зазначеним шківним пристроєм;
процесор, з'єднаний через кабель з входом двигуна, причому процесор виконаний з можливістю, за зазначеним сигналом на включення двигуна, управляти транспортним засобом в автоматичному режимі кермового управління.
2. Система кермового управління за п. 1, яка відрізняється тим, що процесор виконаний з можливістю в автоматичному режимі кермового управління видати сигнал кермового управління на зазначений двигун на поворот вала на задану величину, і у разі відхилення між заданою величиною і фактичним поворотом вала процесор виконаний з можливістю переключення режиму кермового управління з автоматичного на ручний.
3. Система кермового управління за п. 1, яка відрізняється тим, що має датчик зворотного зв'язку, з'єднаний із зазначеним двигуном, який у разі повороту вала водієм в автоматичному режимі кермового управління подає в процесор вказівку про примусовий перехід в режим ручного управління.
4. Система кермового управління за п. 3, яка відрізняється тим, що зазначений двигун являє собою кроковий електродвигун, а зазначений датчик зворотного зв'язку являє собою датчик положення вала на зазначеному двигуні.
5. Система кермового управління за п. 1, яка відрізняється тим, що ручний орган управління являє собою кермове колесо, що встановлене на зазначеному валу.
6. Система кермового управління за п. 1, яка відрізняється тим, що зазначені двигун, шківний пристрій і передача встановлені на кронштейні кермової колонки, що виконана з можливістю вибірково кріпитися і зніматися.
7. Система кермового управління за п. 6, яка відрізняється тим, що зазначений обід кермового колеса встановлений з можливістю обертання на зазначеному знімному кронштейні кермової колонки.
8. Система кермового управління за п. 1, яка відрізняється тим, що зазначений шківний пристрій містить елемент-вставку, причому зазначений елемент-вставка є змінним для встановлення зазначеного шківного пристрою на обертових валах різної форми.
9. Система кермового управління за п. 1, яка відрізняється тим, що зазначений шківний пристрій містить пасову передачу або ланцюгову передачу.
10. Перетворювальний пристрій для переведення позашляхового транспортного засобу з ручного режиму кермового управління в автоматичний режим кермового управління, причому зазначений транспортний засіб має кермову колонку з кермовим колесом, встановленим на обертовому валу кермового управління, причому зазначений перетворювальний пристрій містить:
приводний шків, виконаний з можливістю з'єднання із зазначеним валом кермового управління у місці на відстані від зазначеного кермового колеса для обертання разом із валом;
двигун, який виконаний з можливістю управління процесором;
вузол кронштейна для приводного з'єднання зазначеного вузла приводного шківа із зазначеним двигуном для переміщення двигуна разом із валом кермового управління в обох режимах кермового управління - в автоматичному і в ручному; і
процесор, підключений до зазначеного двигуна і виконаний з можливістю управляти транспортним засобом в автоматичному режимі за допомогою управляючого сигналу з місця, віддаленого від транспортного засобу.
11. Пристрій за п. 10, який відрізняється тим, що на зазначеному вузлі кронштейна встановлене додаткове кермове колесо, причому зазначене додаткове кермове колесо заміняє згадане першим кермове колесо, коли приєднано зазначений приводний шків.
12. Пристрій за п. 11, який відрізняється тим, що зазначений приводний шків є встановленим на зазначеному вузлі кронштейна для обертання разом із зазначеним додатковим кермовим колесом.
13. Пристрій за п. 10, який відрізняється тим, що зазначений вал кермового управління має верхній кінець, з'єднаний із зазначеним кермовим колесом, а зазначений приводний шків з'єднаний із зазначеним верхнім кінцем для забезпечення встановлення зазначеного перетворювального пристрою.
14. Система кермового управління, що має ручний режим кермового управління для вибіркового кермового управління керованими колесами позашляхового транспортного засобу або має автоматичний режим кермового управління з використанням управляючого сигналу з місця, віддаленого від зазначеного транспортного засобу, що включає пристрій ручного кермового управління, з'єднаний з важільною системою для переміщення водієм керованих коліс у ручному режимі, причому пристрій ручного кермового управління включає обід кермового колеса, з'єднаний з важільною системою для переміщення разом із важільною системою у ручному режимі кермового управління, та вузол для забезпечення автоматичного кермового управління транспортним засобом в автоматичному режимі кермового управління, причому зазначений вузол містить:
вузол приводного двигуна кермового управління;
передачу, що з'єднує зазначений вузол двигуна і зазначену важільну систему у місці на відстані від зазначеного обода;
процесор, підключений до зазначеного двигуна і призначений для включення зазначеного двигуна для переміщення зазначеного обода і управління зазначеним транспортним засобом в автоматичному режимі кермового управління; і
причому зазначений вузол приводного двигуна кермового управління має датчик положення для вхідного сигналу для кермового управління, що подає в процесор сигнал зворотного зв'язку за керованим кутом; і
причому зазначений процесор за зазначеним сигналом зворотного зв'язку за керованим кутом і зазначеним управляючим сигналом керує зазначеним транспортним засобом.
15. Система кермового управління за п. 14, яка відрізняється тим, що додатково містить систему кінематики у реальному масштабі часу, підключену до процесора, причому зазначена системи кінематики у реальному масштабі часу подає сигнал кінематики у реальному масштабі часу, і процесор за зазначеним сигналом кінематики у реальному масштабі часу керує зазначеним транспортним засобом в автоматичному режимі кермового управління.
16. Система кермового управління за п. 14, яка відрізняється тим, що додатково містить датчик поправки на місцевість, підключений до процесора, що подає сигнал про місцевість, що вказує на місцевість, по якій зазначений транспортний засіб рухається, і процесор за зазначеним сигналом про місцевість керує зазначеним транспортним засобом в автоматичному режимі кермового управління.
17. Система кермового управління за п. 14, яка відрізняється тим, що зазначений вузол розташований на частині зазначеної важільної системи у приводному взаємозв'язку із зазначеною важільною системою.
18. Система кермового управління за п. 17, яка відрізняється тим, що зазначений вузол має знімне кермове колесо, з'єднане з шківним елементом, а зазначений вузол двигуна містить кроковий двигун, встановлений поруч із зазначеним шківним елементом у приводному взаємозв'язку із зазначеним шківним елементом в обох режимах кермового управління - ручному й автоматичному.
19. Система кермового управління за п. 17, яка відрізняється тим, що зазначена важільна система має обертовий вал кермового управління, що має верхній кінець, з'єднаний із зазначеним ободом, і тим, що зазначена передача з'єднується із зазначеним верхнім кінцем, забезпечуючи прикріплення зазначеного вузла до зазначеної важільної системи.
20. Система кермового управління за п. 19, яка відрізняється тим, що зазначений двигун встановлений безпосередньо на зазначеному валу кермового управління.
21. Система кермового управління за п. 14, яка відрізняється тим, що зазначений процесор підключений до глобальної системи визначення місцезнаходження.
22. Система кермового управління за п. 14, яка відрізняється тим, що зазначений датчик положення для вхідного сигналу для кермового управління, який забезпечує зворотний зв'язок за керованим кутом, знаходиться на зазначеному двигуні, а також містить блок системи кермового управління, що розміщений у зазначеному двигуні й вибірково підключається до кабелю локальної мережі контролерів на транспортному засобі.
Текст
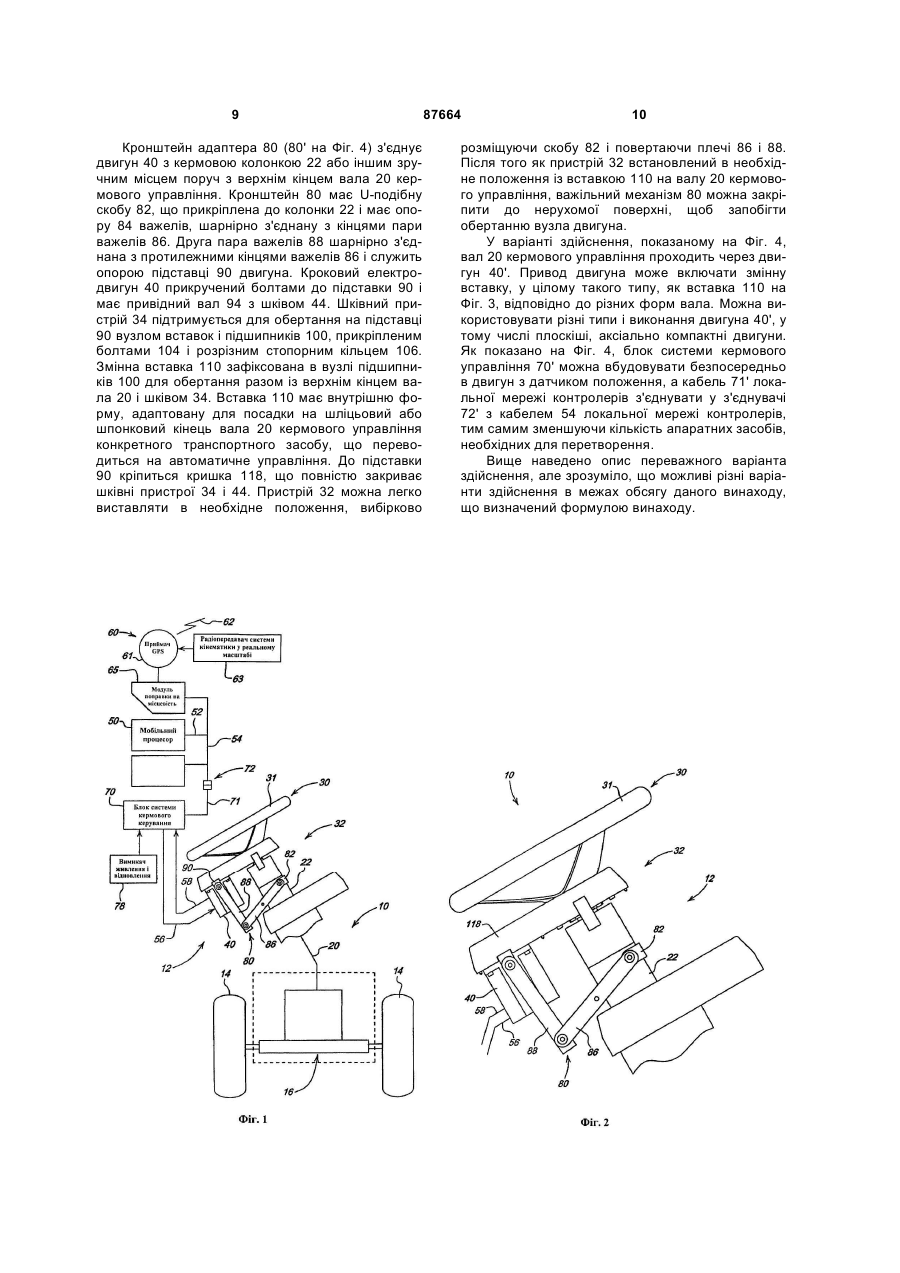
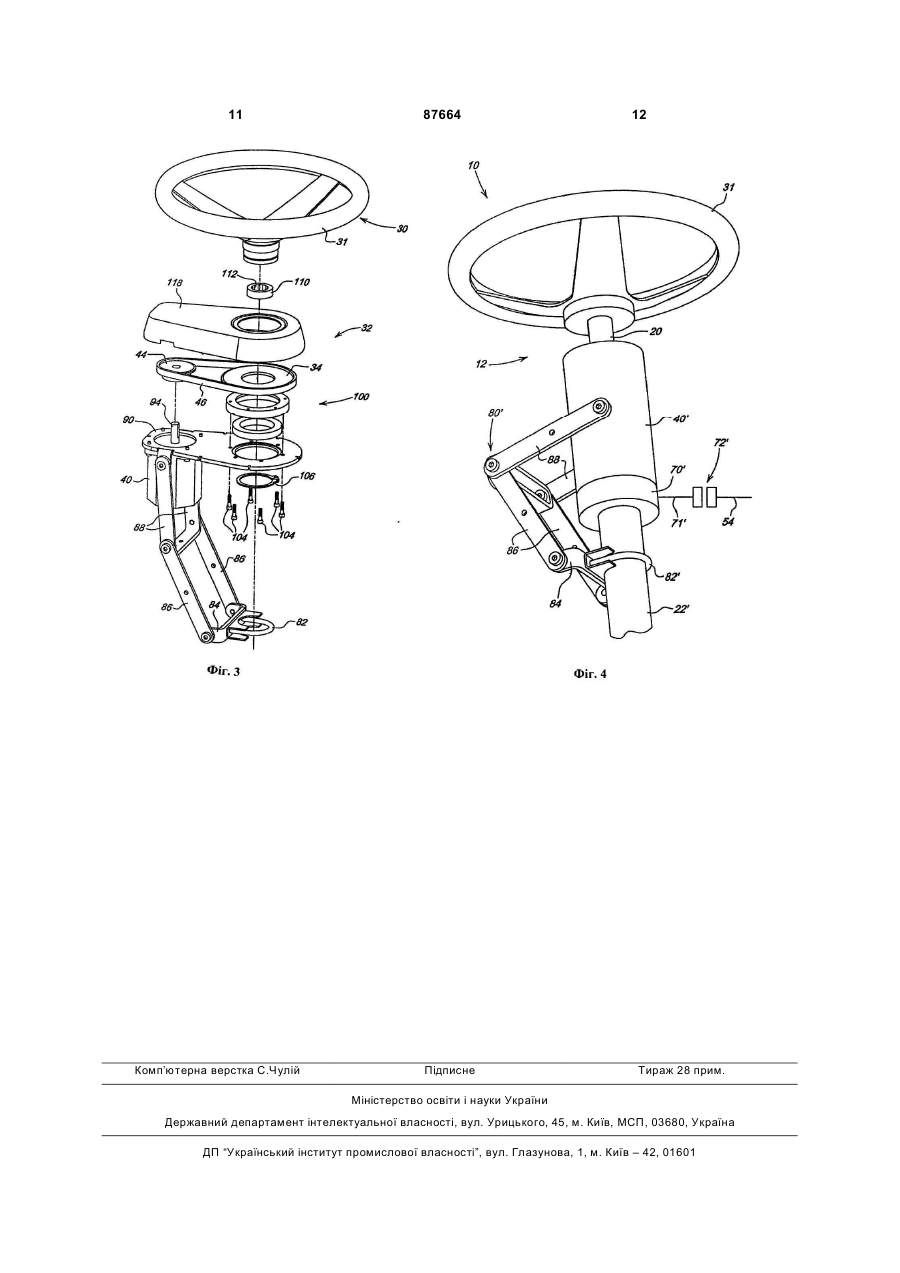
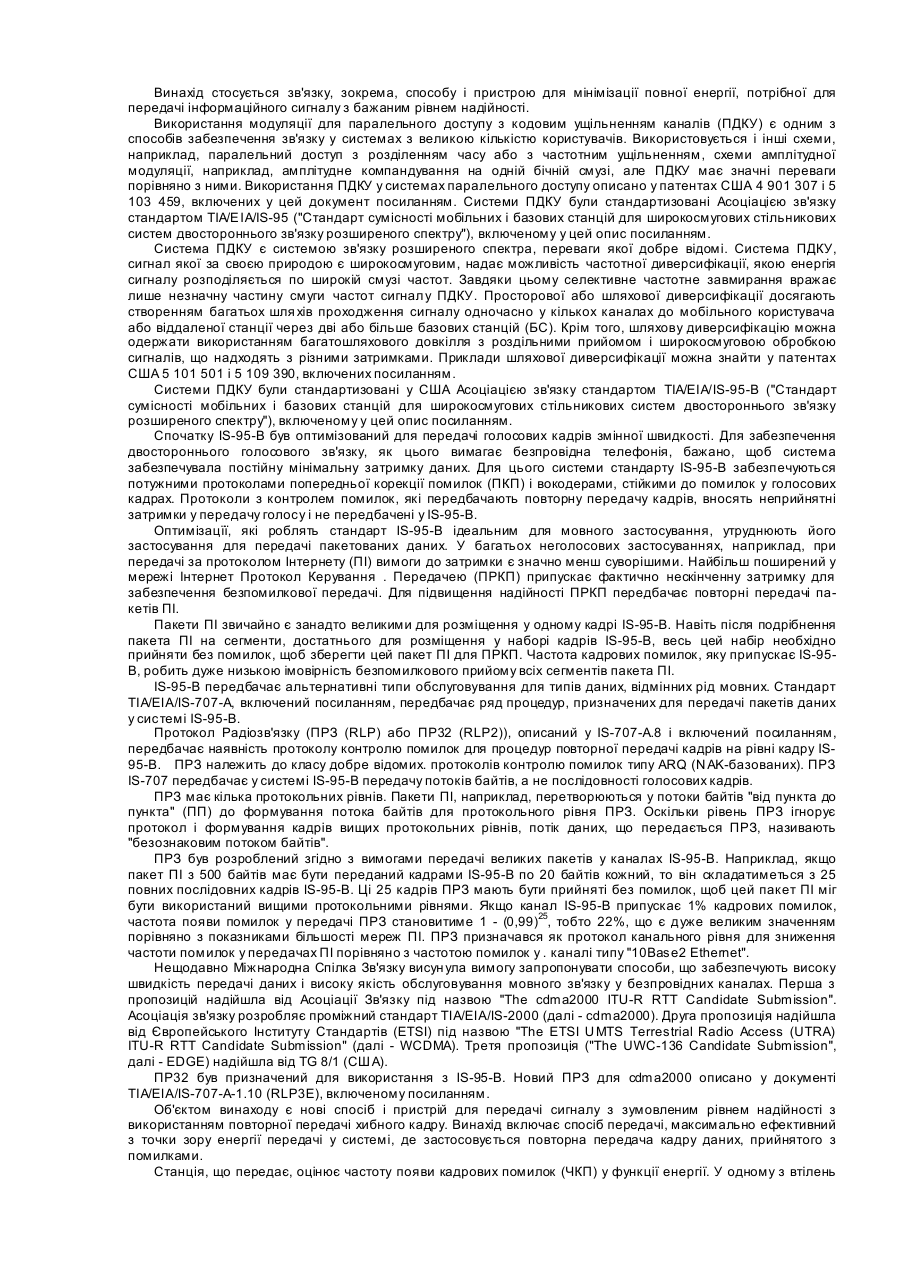
1. Система кермового управління, що має ручний та автоматичний режими кермового управління, для вибіркового кермового управління керованими колесами позашляхового транспортного засобу з використанням управляючого сигналу з місця, віддаленого від зазначеного транспортного засобу, причому зазначена система кермового управління містить: пристрій ручного кермового управління для переміщення керованих коліс водієм у ручному режимі, причому зазначений пристрій ручного кермового управління включає обід кермового колеса, з'єднаний з обертовим валом для руху разом із цим валом в обох режимах управління - і в ручному, і в автоматичному; двигун, який виконаний з можливістю управління процесором; шківний пристрій, з'єднаний з зазначеним валом у місці на відстані від зазначеного обода; передачу, що з'єднує зазначений двигун із зазначеним шківним пристроєм; процесор, з'єднаний через кабель з входом двигуна, причому процесор виконаний з можливістю, за зазначеним сигналом на включення двигуна, управляти транспортним засобом в автоматичному режимі кермового управління. 2 (19) 1 3 стрій містить пасову передачу або ланцюгову передачу. 10. Перетворювальний пристрій для переведення позашляхового транспортного засобу з ручного режиму кермового управління в автоматичний режим кермового управління, причому зазначений транспортний засіб має кермову колонку з кермовим колесом, встановленим на обертовому валу кермового управління, причому зазначений перетворювальний пристрій містить: приводний шків, виконаний з можливістю з'єднання із зазначеним валом кермового управління у місці на відстані від зазначеного кермового колеса для обертання разом із валом; двигун, який виконаний з можливістю управління процесором; вузол кронштейна для приводного з'єднання зазначеного вузла приводного шківа із зазначеним двигуном для переміщення двигуна разом із валом кермового управління в обох режимах кермового управління - в автоматичному і в ручному; і процесор, підключений до зазначеного двигуна і виконаний з можливістю управляти транспортним засобом в автоматичному режимі за допомогою управляючого сигналу з місця, віддаленого від транспортного засобу. 11. Пристрій за п. 10, який відрізняється тим, що на зазначеному вузлі кронштейна встановлене додаткове кермове колесо, причому зазначене додаткове кермове колесо заміняє згадане першим кермове колесо, коли приєднано зазначений приводний шків. 12. Пристрій за п. 11, який відрізняється тим, що зазначений приводний шків є встановленим на зазначеному вузлі кронштейна для обертання разом із зазначеним додатковим кермовим колесом. 13. Пристрій за п. 10, який відрізняється тим, що зазначений вал кермового управління має верхній кінець, з'єднаний із зазначеним кермовим колесом, а зазначений приводний шків з'єднаний із зазначеним верхнім кінцем для забезпечення встановлення зазначеного перетворювального пристрою. 14. Система кермового управління, що має ручний режим кермового управління для вибіркового кермового управління керованими колесами позашляхового транспортного засобу або має автоматичний режим кермового управління з використанням управляючого сигналу з місця, віддаленого від зазначеного транспортного засобу, що включає пристрій ручного кермового управління, з'єднаний з важільною системою для переміщення водієм керованих коліс у ручному режимі, причому пристрій ручного кермового управління включає обід кермового колеса, з'єднаний з важільною системою для переміщення разом із важільною системою у ручному режимі кермового управління, та вузол для забезпечення автоматичного кермового управління транспортним засобом в автоматичному режимі кермового управління, причому зазначений вузол містить: вузол приводного двигуна кермового управління; 87664 4 передачу, що з'єднує зазначений вузол двигуна і зазначену важільну систему у місці на відстані від зазначеного обода; процесор, підключений до зазначеного двигуна і призначений для включення зазначеного двигуна для переміщення зазначеного обода і управління зазначеним транспортним засобом в автоматичному режимі кермового управління; і причому зазначений вузол приводного двигуна кермового управління має датчик положення для вхідного сигналу для кермового управління, що подає в процесор сигнал зворотного зв'язку за керованим кутом; і причому зазначений процесор за зазначеним сигналом зворотного зв'язку за керованим кутом і зазначеним управляючим сигналом керує зазначеним транспортним засобом. 15. Система кермового управління за п. 14, яка відрізняється тим, що додатково містить систему кінематики у реальному масштабі часу, підключену до процесора, причому зазначена системи кінематики у реальному масштабі часу подає сигнал кінематики у реальному масштабі часу, і процесор за зазначеним сигналом кінематики у реальному масштабі часу керує зазначеним транспортним засобом в автоматичному режимі кермового управління. 16. Система кермового управління за п. 14, яка відрізняється тим, що додатково містить датчик поправки на місцевість, підключений до процесора, що подає сигнал про місцевість, що вказує на місцевість, по якій зазначений транспортний засіб рухається, і процесор за зазначеним сигналом про місцевість керує зазначеним транспортним засобом в автоматичному режимі кермового управління. 17. Система кермового управління за п. 14, яка відрізняється тим, що зазначений вузол розташований на частині зазначеної важільної системи у приводному взаємозв'язку із зазначеною важільною системою. 18. Система кермового управління за п. 17, яка відрізняється тим, що зазначений вузол має знімне кермове колесо, з'єднане з шківним елементом, а зазначений вузол двигуна містить кроковий двигун, встановлений поруч із зазначеним шківним елементом у приводному взаємозв'язку із зазначеним шківним елементом в обох режимах кермового управління - ручному й автоматичному. 19. Система кермового управління за п. 17, яка відрізняється тим, що зазначена важільна система має обертовий вал кермового управління, що має верхній кінець, з'єднаний із зазначеним ободом, і тим, що зазначена передача з'єднується із зазначеним верхнім кінцем, забезпечуючи прикріплення зазначеного вузла до зазначеної важільної системи. 20. Система кермового управління за п. 19, яка відрізняється тим, що зазначений двигун встановлений безпосередньо на зазначеному валу кермового управління. 21. Система кермового управління за п. 14, яка відрізняється тим, що зазначений процесор під 5 87664 6 ключений до глобальної системи визначення місцезнаходження. 22. Система кермового управління за п. 14, яка відрізняється тим, що зазначений датчик положення для вхідного сигналу для кермового управління, який забезпечує зворотний зв'язок за керованим кутом, знаходиться на зазначеному двигуні, а також містить блок системи кермового управління, що розміщений у зазначеному двигуні й вибірково підключається до кабелю локальної мережі контролерів на транспортному засобі. Галузь винаходу Цей винахід відноситься до автоматичних систем кермового управління для транспортних засобів взагалі і зокрема до автоматичних систем, що можуть адаптуватися до самих різноманітних позашляхових транспортних засобів з різними механізмами кермового управління. Передумови винаходу Сучасні автоматичні системи кермового управління для позашляхових транспортних засобів, наприклад, система кермового управління з підсилювачем для факторів GreenStar™ Auto Trac, що випускається компанією "John Deere", зазвичай потребують допоміжної електрогідравлічної системи кермового управління для взаємодії із системою кермового управління на транспортному засобі. Сполучення сигналів глобальної системи визначення місцезнаходження і сигналів від бортових датчиків оброблюється, щоб забезпечити автоматичне управління транспортним засобом. Для управління взаємодією ручної системи з автоматичною необхідні електрогідравлічний клапан, датчик керованого кута керма і датчик переміщення кермового колеса, що можуть блокуватися водієм. Установка такої автоматичної системи віднімає багато часу, і вона потребує знання системи кермового управління, гідравлічної й електричної систем на транспортному засобі. Автоматична система має бути спеціально адаптованою до конкретної системі кермового управління на транспортному засобі. На деяких транспортних засобах, наприклад, транспортних, засобах з двоходовим гідростатичним механізмом кермового управління, використання цієї системи може бути обмеженим. Деякі типи автоматичних систем кермового управління, наприклад, описані в патенті США № 5 234 070, потребують спеціальної муфти, що протягом одного з режимів кермового управління виводиться із зачеплення. Багато систем потребують окремого датчика керованого кута кермового колеса. В іншому типі системи, електричний двигун з фрикційною передачею у зачепленні з кермовим колесом встановлюється на кермовій колонці. Такий зовнішній додатковий тип пристрою часто не вбудовується в систему, і відкритий устрій фрикційної передачі представляє точки защемлення і піддається зносу як у фрикційній передачі, так і у кермовому колесі. Будь-яке проковзування у передачі може спричинити нестійкість у системі кермового управління й справити негативний вплив на точність кермового управління. Крім того, для точності, що часто вимагається від систем автоматичного кермового управління, системі бракує харак теристик інерційних вимірювань, або кінематики у реальному масштабі часу. Необхідна простіша, дешевша і така, що легше встановлюється, автоматична система кермового управління, що мінімізує або повністю виключає суттєві переробки системи кермового управління та використання спеціальних муфт. Крім того, необхідна така система, що є точнішою і надійнішою принаймні ніж більшість відомих систем і яка краще вбудовується - функціонально й естетично - в більшість існуючих механізмів кермового управління. Стислий опис винаходу Пристрій для перетворення звичайної ручної системи кермового управління позашляхового транспортного засобу на автоматичну систему кермового управління з використанням дистанційних сигналів. Кроковий електродвигун двигун, який виконаний з можливістю управління процесором, з'єднаний ланцюговою або пасовою передачею з ведучою зірочкою або шківом, встановленими на валу кермового механізму. Кроковий електродвигун підключений до мікропроцесора і рухається разом із валом кермового механізму в обох режимах кермового управління - автоматичному і ручному. Датчик положення вала подає сигнал до мікропроцесора, що переключає роботу на ручний режим, якщо кількість кроків, передана датчиком положення, відрізняється від очікуваної. Вузол, що включає замінне кермове колесо, шків вала і кроковий електродвигун, легко з'єднується з кермовою колонкою і добре вбудовується - функціонально й естетично - в більшість позашляхових транспортних засобів. Розміщення приводного пристрою поруч з верхнім кінцем вала кермового механізму сприяє зручному монтажу пристрою. Для монтажу передбачені вставки, призначені для адаптації конкретного виконання вала кермового управління до ведучої зірочки або шківу. В іншому варіанті здійснення двигун можна встановлювати безпосередньо на кінці цього вала без будь-якої додаткової передачі. Цей пристрій кермового управління можна встановлювати на різноманітних транспортних засобах, що мають різні типи систем кермового управління з гідравлічним або механічним підсилювачем. У датчиках керованого кута кермового колеса і датчиках, призначених для визначення, чи крутить водій кермове колесо вручну, немає потреби. Сигнал положення кермового колеса з датчика положення забезпечує зворотний зв'язок за керованим кутом без потреби у додаткових датчиках і використовується в алгоритмах управління для покращення характеристик, надійності й стій 7 кості транспортного засобу. В одному варіанті здійснення для подальшого покращення характеристик кермового управління в процесор подаються сигнали поправки на місцевість. Подальше покращення забезпечується через використання електронного блока системи кермового управління із датчиком положення безпосередньо на двигуні, щоб уможливити легке підключення системи до кабелю локальної мережі контролерів транспортного засобу з мінімальною кількістю апаратних засобів. Ці й інші цілі, ознаки й переваги цього винаходу стануть очевидними після прочитання наступного докладного опису, що ведеться із посиланнями на додані креслення. Стислий опис графічного матеріалу На Фіг. 1 наведене схематичне представлення пристрою кермового управління, призначеного для перетворення ручної системи кермового управління на автоматичну. Фіг. 2 представляє собою вид збоку пристрою кермового управління і монтажного вузла. Фіг. 3 представляє собою об'ємне зображення з просторовим рознесенням деталей пристрою кермового управління на Фіг. 2. Фіг. 4 представляє собою загальний вид збоку альтернативного варіанта здійснення, на якому показаний двигун кермового управління, з'єднаний безпосередньо з валом кермового управління. Опис переважного варіанта здійснення На Фіг. 1 показаний позашляховий транспортний засіб 10, наприклад, трактор або технологічний транспортний засіб, який має станцію 12 водія і який для руху по землі спирається на керовані колеса 14. Колеса 14 з'єднані із звичайним механізмом 16 кермового управління, що включає обертовий вал 20 кермового управління, встановлений в кермовій колонці 22, що виступає вверх до станції 12 водія. Кермове колесо 30 з ободом 31 встановлене на верхньому кінці вала 20 і призначене для ручного кермового управління водієм. Як показано, кермове колесо 30 є частиною пристрою для перетворення, позначеного загальною позицією 32 і призначеного для забезпечення функції автоматичного кермового управління на транспортному засобі, нормально обладнаного лише для ручного кермового управління. Альтернативно, перше кермове колесо можна встановлювати на пристрої для перетворення 32. Шківний пристрій 34 з'єднаний для обертання з валом 20 навколо вісі вала у місці поруч із з'єднанням кермового колеса 30 з валом 20. Двигун 40 встановлений на колонці 22. Шківний пристрій 44 з'єднує двигун 40 із шківним пристроєм 34 для передачі. Як показано, шківні пристрої 34 і 44 - це шківи, з'єднані ланцюговою, звичайною пасовою або зубчастою пасовою передачею 46. Можна, однак, використовувати й інші типи передач, наприклад, зубчасті передачі. Крім того, як показано у варіанті здійснення, представленому на Фіг. 4, двигун 40' можна встановлювати на кінці валу 20 кермового управління для забезпечення прямої передачі на вал 20 у місці, зміщеному від обода 31. На транспортному засобі 10 знаходиться мобільний процесор 50, що має керуючий вихід 52, 87664 8 з'єднаний через кабель 54 локальної мережі контролерів з входом 56 двигуна 40. Вихід 58 зворотного зв'язку за положенням на двигуні 40 з'єднаний з входом процесора 50. Як показано, двигун 40 представляє собою кроковий електродвигун, а пристрій зворотного зв'язку - датчик положення вала, встановлений на двигуні, що передає сигнал по лінії 58 зворотного зв'язку, що вказує кількість кроків, що пройшов електродвигун 40. Двигун 40 залишається приєднаним для приводу до вала 20 кермового механізму в обох режимах кермового управління - автоматичному і ручному, і відтак датчик положення здатний видавати сигнал положення вала на процесор 50 в обох режимах. Процесор 50 з'єднаний з вузлом датчика положення, що позначений загальною позицією 60 на Фіг. 1, наприклад, з глобальною системою визначення місцезнаходження з приймачем 61, що отримує сигнали 62 з одного або кількох віддалених місць. Додаткові поправочні вхідні сигнали, наприклад, диференційний поправочний вхідний сигнал з системи кінематики у реальному масштабі часу наземного базування, можуть подаватися радіопередавачем 63 системи кінематики у реальному масштабі, і вхідний сигнал поправки на місцевість може подаватися з модуля поправки на місцевість 65. Модуль поправки на місцевість 65 вносить поправки до даних глобальної системи визначення місцезнаходження на кут крену і кутового повороту навколо вертикальної вісі під час руху транспортного засобу по нерівній місцевості. Система 60 з'єднана через кабель 54 локальної мережі контролерів з входом процесора 50. Блок системи кермового управління 70 є з'єднаний через кабель 71 локальної мережі контролерів і з'єднувач системи 72 з кабелем 54 локальної мережі контролерів. Блок системи кермового управління 70 отримує керуючу інформацію з мобільного процесора 50 і інформацію зворотного зв'язку за положенням через лінію 58 з датчика положення на двигуні 40. До блоку системи кермового управління 70 підключений вимикач живлення і відновлення 78. Процесор 50 визначає місцезнаходження транспортного засобу і порівнює його з необхідним місцезнаходженням і призначеним шляхом транспортного засобу. Видається сигнал помилки, і двигун 40 включається для переміщення на попередньо вибрану кількість кроків відповідно до сигналу помилки. Пристрої виявлення, наприклад, датчик швидкості відносно землі і датчик бокової швидкості (складової вектора швидкості, перпендикулярної вісі х і паралельної площині дороги), видають сигнали, використовувані процесором 50 для підвищення точності автоматичної системи кермового управління. Якщо кількість кроків, передана процесору 50 датчиком двигуна, виходить за границі, очікувані процесором, система домислює, що водій бажає узяти управління на себе, і відключає живлення крокового електродвигуна 40. Крім того, якщо датчик виявляє рух кермового колеса, коли ніяка зміна положення процесором не вимагалася, живлення двигуна 40 також переривається. 9 Кронштейн адаптера 80 (80' на Фіг. 4) з'єднує двигун 40 з кермовою колонкою 22 або іншим зручним місцем поруч з верхнім кінцем вала 20 кермового управління. Кронштейн 80 має U-подібну скобу 82, що прикріплена до колонки 22 і має опору 84 важелів, шарнірно з'єднану з кінцями пари важелів 86. Друга пара важелів 88 шарнірно з'єднана з протилежними кінцями важелів 86 і служить опорою підставці 90 двигуна. Кроковий електродвигун 40 прикручений болтами до підставки 90 і має привідний вал 94 з шківом 44. Шківний пристрій 34 підтримується для обертання на підставці 90 вузлом вставок і підшипників 100, прикріпленим болтами 104 і розрізним стопорним кільцем 106. Змінна вставка 110 зафіксована в вузлі підшипників 100 для обертання разом із верхнім кінцем вала 20 і шківом 34. Вставка 110 має внутрішню форму, адаптовану для посадки на шліцьовий або шпонковий кінець вала 20 кермового управління конкретного транспортного засобу, що переводиться на автоматичне управління. До підставки 90 кріпиться кришка 118, що повністю закриває шківні пристрої 34 і 44. Пристрій 32 можна легко виставляти в необхідне положення, вибірково 87664 10 розміщуючи скобу 82 і повертаючи плечі 86 і 88. Після того як пристрій 32 встановлений в необхідне положення із вставкою 110 на валу 20 кермового управління, важільний механізм 80 можна закріпити до нерухомої поверхні, щоб запобігти обертанню вузла двигуна. У варіанті здійснення, показаному на Фіг. 4, вал 20 кермового управління проходить через двигун 40'. Привод двигуна може включати змінну вставку, у цілому такого типу, як вставка 110 на Фіг. 3, відповідно до різних форм вала. Можна використовувати різні типи і виконання двигуна 40', у тому числі плоскіші, аксіально компактні двигуни. Як показано на Фіг. 4, блок системи кермового управління 70' можна вбудовувати безпосередньо в двигун з датчиком положення, а кабель 71' локальної мережі контролерів з'єднувати у з'єднувачі 72' з кабелем 54 локальної мережі контролерів, тим самим зменшуючи кількість апаратних засобів, необхідних для перетворення. Вище наведено опис переважного варіанта здійснення, але зрозуміло, що можливі різні варіанти здійснення в межах обсягу даного винаходу, що визначений формулою винаходу. 11 Комп’ютерна верстка С.Чулій 87664 Підписне 12 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSteering system (variants) and conversion structure in steering system
Автори англійськоюNelson Frederick W.
Назва патенту російськоюСистема рулевого управления (варианты) и преобразовательное устройство в системе рулевого управления
Автори російськоюНельсон Фредерик В.
МПК / Мітки
МПК: B62D 5/00, B62D 6/00, B62D 1/00, A01B 69/00
Мітки: пристрій, система, перетворювальний, управління, варіанти, кермового, системі
Код посилання
<a href="https://ua.patents.su/6-87664-sistema-kermovogo-upravlinnya-varianti-ta-peretvoryuvalnijj-pristrijj-v-sistemi-kermovogo-upravlinnya.html" target="_blank" rel="follow" title="База патентів України">Система кермового управління (варіанти) та перетворювальний пристрій в системі кермового управління</a>
Спосіб повторної передачі у системі зв’язку (варіанти) і пристрій для його здійснення (варіанти)
Номер патенту: 72544
Опубліковано: 15.03.2005
Автори: Разумов Леонід, Голтцман Джек, Ландбі Стайн А.
МПК: H04B 7/005, H04L 1/16
Мітки: спосіб, системі, варіанти, зв'язку, пристрій, повторної, передачі, здійснення
Формула / Реферат:
1. Спосіб повторної передачі у системі зв'язку, який включає операції:визначення сукупності енергій передачі згідно з зумовленим рівнем надійності і з щонайменше однією характеристикою каналу зв'язку, причому це визначення включає операції:вимірювання щонайменше однієї з характеристик зазначеного каналу зв'язку і використання довідкової таблиці для вибору заздалегідь обчислених енергій передачі, що відповідають зазначеній...
Персоніфікований протиугінний пристрій для блокування вала кермового механізму, важелів педалей зчеплення, гальма і важеля або педалі керування подачею палива транспортного засобу (варіанти)
Номер патенту: 40737
Опубліковано: 15.05.2003
Автори: Меснянкін Борис Миколайович, Меснянкін Олександр Борисович
МПК: B60R 25/02
Мітки: важеля, персоніфікований, варіанти, пристрій, блокування, педалей, засобу, протиугінний, керування, вала, зчеплення, подачею, кермового, палива, важелів, механізму, транспортного, гальма, педалі
Формула / Реферат:
1. Персоніфікований протиугінний пристрій для блокування вала кермового механізму, важелів педалей зчеплення, гальма і важеля або педалі керування подачею палива транспортного засобу, який містить корпус з основою, кришку з основою, яка фіксується на корпусі за допомогою фіксуючого засобу, який складається з двох частин, на корпусі і кришці жорстко закріплений запірний пристрій, який складається із замканавісного типу, захищеного захисною...
Стільникова система зв’язку (варіанти), спосіб керування потужністю передачі у стільниковій системі зв’язку (варіанти), мобільний пристрій та контролер стільникової станції та системи
Номер патенту: 42677
Опубліковано: 15.11.2001
Автори: Блейкні Роберт Д., Уівер Ліндсі А. мол., Падовейні Роберто, Гілхаузен Клайн С., Уітлі Чарлз Е.
МПК: H04L 27/26
Мітки: стільникова, стільникової, пристрій, мобільній, варіанти, система, спосіб, зв'язку, системі, контролер, передачі, станції, потужністю, керування, стільниковій
Формула / Реферат:
1. Сотовая система связи, в которой пользователь (16, 18) системы поддерживает двустороннюю связь с другим пользователем несущими информацию модулированными сигналами расширенного спектра, передаваемыми через несколько сотовых станций (12, 14), отличающаяся тем, что пользователь (16, 18) системы имеет передатчик (84) для передачи несущих информацию модулированных сигналов расширенного спектра указанным сотовым станциям (12, 14), приемники...
Спосіб (варіанти) і система прокачування текучої субстанції по системі свердловин (варіанти)
Номер патенту: 82860
Опубліковано: 26.05.2008
Автор: Зупанік Джозеф А.
МПК: E21B 21/08, E21B 43/00, E21B 43/30, E21B 21/14
Мітки: субстанції, спосіб, системі, прокачування, текучої, система, варіанти, свердловин
Формула / Реферат:
1. Спосіб прокачування бурового розчину в системі свердловин, що включає:буріння по суті вертикальної свердловини від поверхні в підземну зону;буріння зчленованої свердловини від поверхні в підземну зону з використанням колони бурильних труб, причому зчленована свердловина перетинає по суті вертикальну свердловину в місці з’єднання щонайменше поблизу підземної зони;формування дренажної порожнини від місця з’єднання...
Спосіб переведення зв’язку абонентського пристрою у безпровідній системі зв’язку (варіанти), спосіб роботи абонентського пристрою у цій системі та стільникова телефонна система, що забезпечує обслуговування або
Номер патенту: 46827
Опубліковано: 17.06.2002
Автор: Агре Деніел Г.
МПК: H04B 7/26, H04Q 7/22, H04Q 7/38
Мітки: зв'язку, переведення, безпровідній, варіанти, забезпечує, стільникова, абонентського, пристрою, роботи, цій, системі, система, спосіб, обслуговування, телефонна
Формула / Реферат:
1. Спосіб переведення зв'язку абонентського пристрою у безпровідній системі з режиму з використанням радіочастотного (РЧ) сигнального інтерфейсу ПДКУ у режим з використанням сигнального РЧ інтерфейсу ГСМ під час телефонного сеансу зв'язку, який включає операції:а) визначення того, що абонентський пристрій, працюючи у режимі з ПДКУ, знаходиться у заздалегідь визначених умовах; iб) обміну даними з абонентським пристроєм згідно з...
Попередній патент: Регулятор рівня підлоги транспортного засобу
Випадковий патент: Кекс "зернятко"