Спосіб захисту радіолокаторів від комбінованих завад, діючих по головному променю діаграми спрямованості антени
Номер патенту: 91114
Опубліковано: 25.06.2014
Автори: Сіренко Андрій Сергійович, Звягінцев Євген Олександрович, Піза Дмитро Макарович
Формула / Реферат
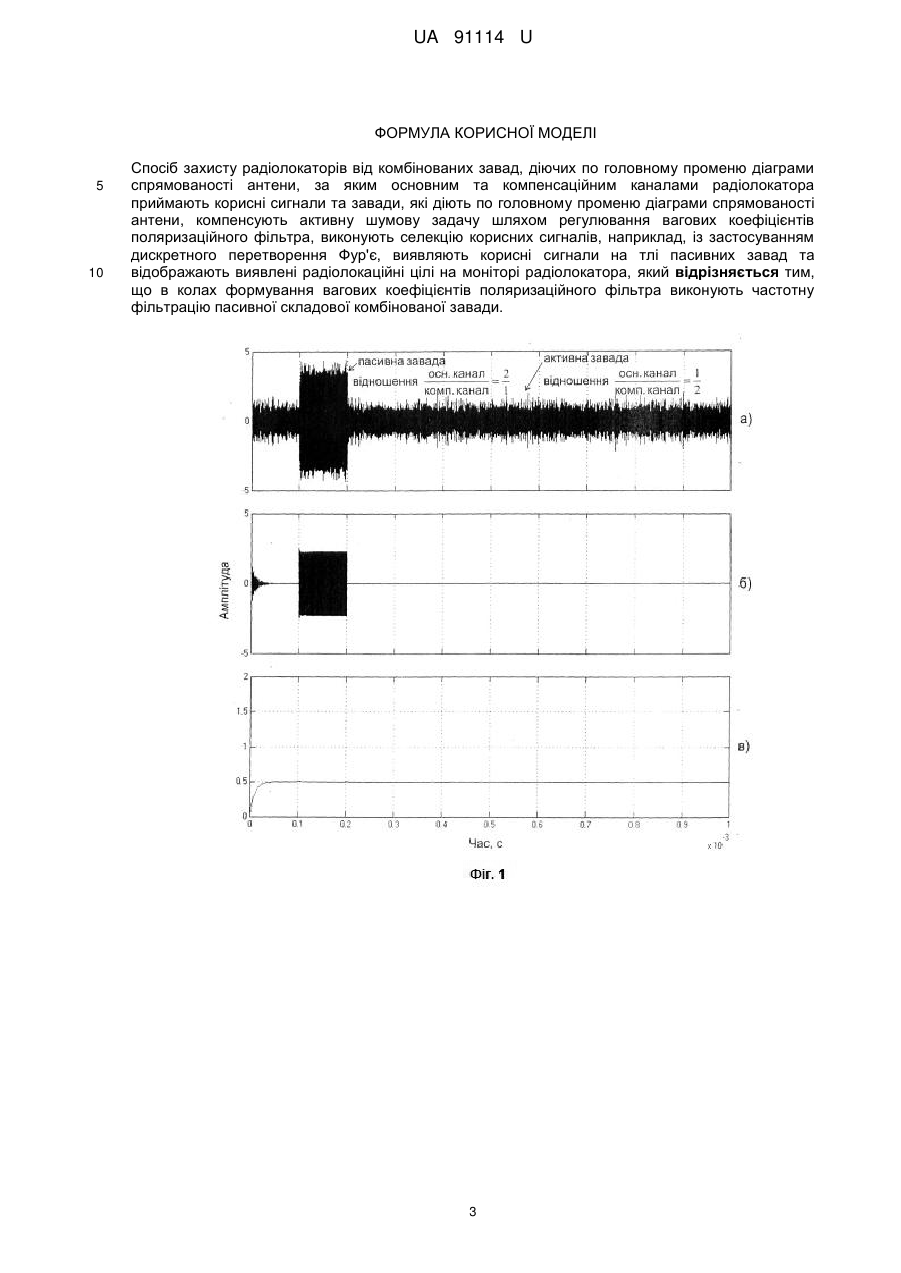
Спосіб захисту радіолокаторів від комбінованих завад, діючих по головному променю діаграми спрямованості антени, за яким основним та компенсаційним каналами радіолокатора приймають корисні сигнали та завади, які діють по головному променю діаграми спрямованості антени, компенсують активну шумову задачу шляхом регулювання вагових коефіцієнтів поляризаційного фільтра, виконують селекцію корисних сигналів, наприклад, із застосуванням дискретного перетворення Фур'є, виявляють корисні сигнали на тлі пасивних завад та відображають виявлені радіолокаційні цілі на моніторі радіолокатора, який відрізняється тим, що в колах формування вагових коефіцієнтів поляризаційного фільтра виконують частотну фільтрацію пасивної складової комбінованої завади.
Текст
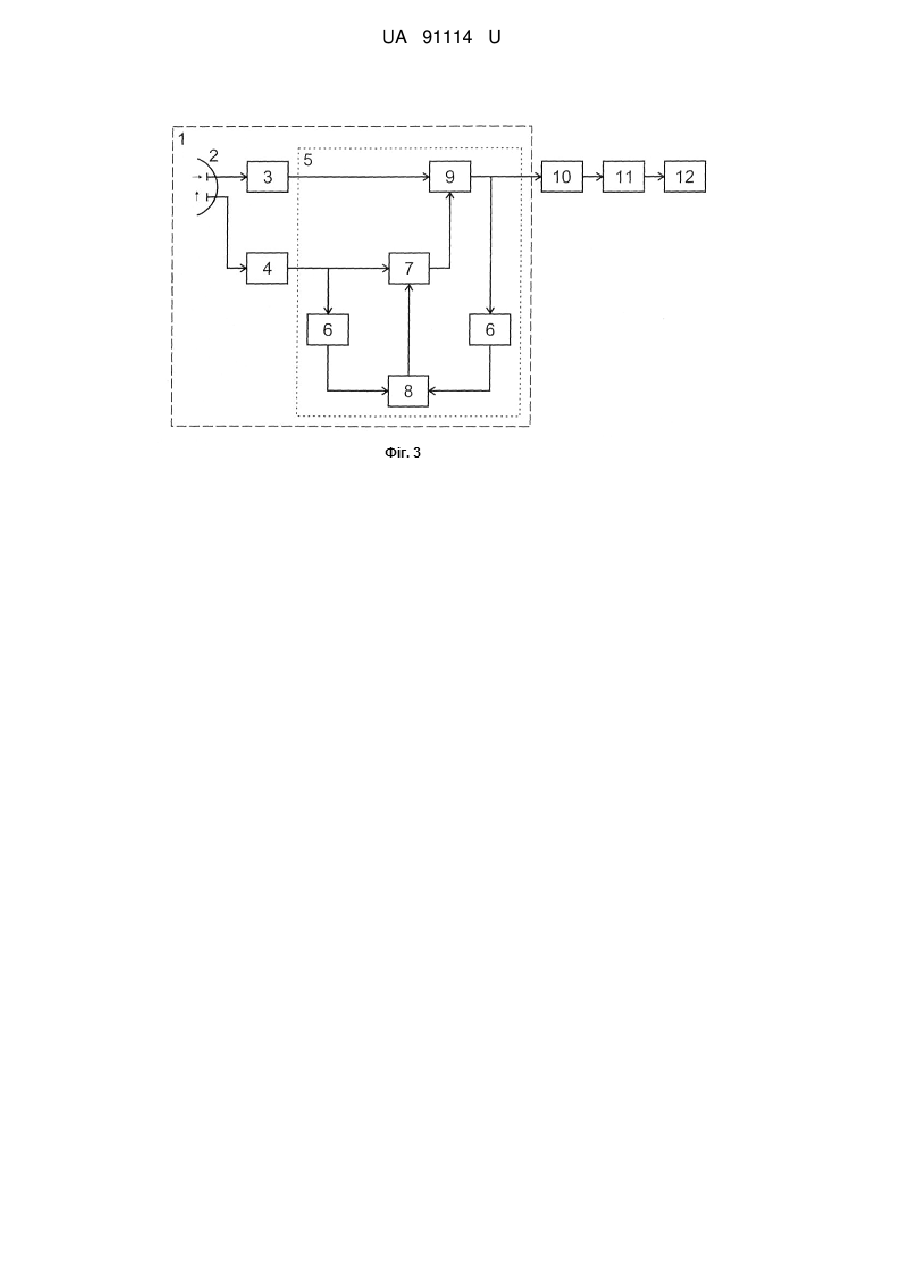
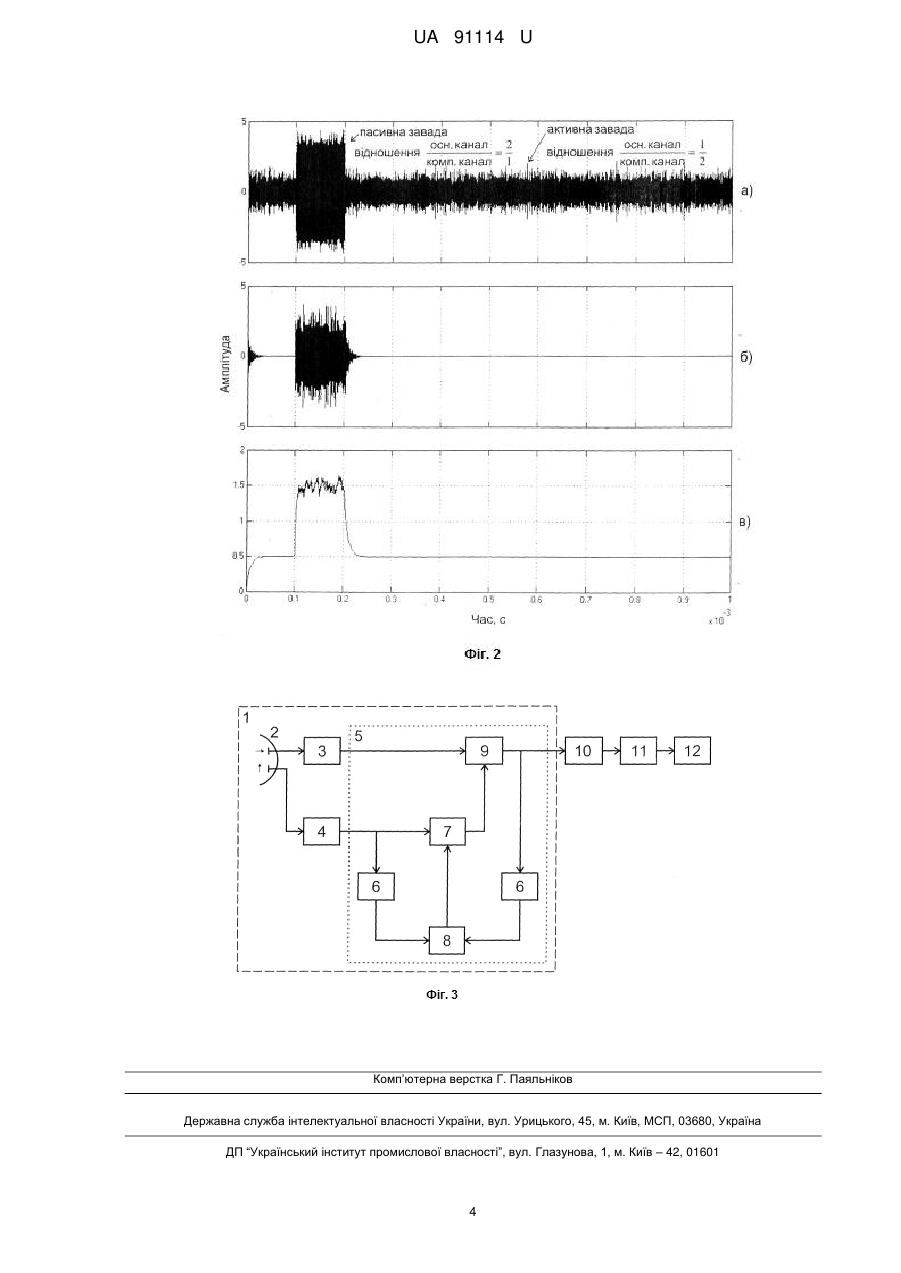
Реферат: Спосіб захисту радіолокаторів від комбінованих завад, діючих по головному променю діаграми спрямованості антени, за яким основним та компенсаційним каналами радіолокатора приймають корисні сигнали та завади, які діють по головному променю діаграми спрямованості антени, компенсують активну шумову задачу шляхом регулювання вагових коефіцієнтів поляризаційного фільтра, виконують селекцію корисних сигналів, наприклад, із застосуванням дискретного перетворення Фур'є, виявляють корисні сигнали на тлі пасивних завад та відображають виявлені радіолокаційні цілі на моніторі радіолокатора. В колах формування вагових коефіцієнтів поляризаційного фільтра виконують частотну фільтрацію пасивної складової комбінованої завади. UA 91114 U (12) UA 91114 U UA 91114 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до радіолокації і може бути використаний для підвищення завадозахищеності радіолокаторів в умовах одночасної дії пасивних та активних шумових завад. Відомий спосіб захисту радіолокаторів від комбінованих завад реалізовано в [1]. За цим способом, після приймання корисних сигналів та завад, компенсують активну шумову заваду, а потім виконують процедури фазової фільтрації та виявлення корисних сигналів, а також відображають виявлені радіолокаційні цілі на моніторі радіолокатора. Особливістю цього способу є те, що обчислення вагових коефіцієнтів для компенсації активних шумових завад виконують в кінці періоду повторення зондуючих імпульсів (в кінці розгортки дальності), коли інтенсивність пасивних завад, які знаходяться на максимальній дальності дії радіолокатора, мінімальна. Суттєвим недоліком наведеного способу є те, що навіть на граничній дальності дії радіолокатора при великій ефективній площі розсіяння, наприклад, гідрометеорів, рівень перевіддзеркалень від них може бути значно більшим від рівня діючої активної шумової завади. У цьому випадку компенсація останньої буде малоефективною. Найбільш близьким за суттю та результатом є спосіб завадозахищеності радіолокаторів від комбінованих завад з використанням порогової обробки коефіцієнта міжканальної кореляції при виборі часових інтервалів для адаптації вагових коефіцієнтів для компенсації активних шумових завад [2]. За цим способом основним та компенсаційним каналами радіолокатора приймають корисні сигнали та завади, компенсують активну шумову заваду шляхом регулювання вагових коефіцієнтів поляризаційного фільтра, виконують селекцію корисних сигналів, наприклад, із застосуванням дискретного перетворення Фур'є, виявляють корисні сигнали на тлі пасивних завад та відображають виявлені радіолокаційні цілі на моніторі радіолокатора. При цьому формування вагових коефіцієнтів виконують на часових інтервалах, де пасивна завада відсутня, що забезпечується поточним оцінюванням коефіцієнта міжканальної кореляції по дальності. Недоліком способу-прототипу є неможливість самонастроювання вагових коефіцієнтів в умовах складних метеорологічних умов, коли на всій розгортці дальності радіолокатора присутні гідрометеори, зокрема хмарні системи типу Сb [3]. В основу корисної моделі поставлено задачу розробки способу захисту радіолокаторів від комбінованих завад, який забезпечує ефективну компенсацію активних шумових завад в умовах одночасної дії протяжних пасивних завад. Вирішення цієї задачі досягається тим, що у способі захисту радіолокаторів від комбінованих завад, за яким основним та компенсаційним каналами радіолокатора приймають корисні сигнали та завади, які діють по головному променю діаграми спрямованості антени, компенсують активну шумову заваду шляхом регулювання вагових коефіцієнтів поляризаційного фільтра, виконують селекцію корисних сигналів, наприклад, із застосуванням дискретного перетворення Фур'є, виявляють корисні сигнали на тлі пасивних завад та відображають виявлені радіолокаційні цілі на моніторі радіолокатора. При цьому в колах формування вагових коефіцієнтів поляризаційного фільтра виконують частотну фільтрацію пасивної складової комбінованої завади. Це дозволяє виключити вплив пасивної завади на процес формування вагових коефіцієнтів поляризаційного фільтра і, як наслідок, забезпечити ефективну компенсацію активної шумової завади при наявності пасивних завад. У порівнянні з прототипом відмінною ознакою є те, що у запропонованому способі використовується частотна фільтрація пасивної завади в колах формування вагових коефіцієнтів автокомпенсатора завад. Використання частотної фільтрації дозволяє забезпечити високу ефективність компенсації активної завади при одночасній дії пасивної завади. У технічному рішенні, що заявляється, нові ознаки при взаємодії з відомими дають новий технічний результат, що дозволяє вирішити поставлену задачу. Таким чином, у порівнянні з прототипом, запропоноване технічне рішення містить вищевказані істотні ознаки і, отже, відповідає вимозі "новизна". Для підтвердження позитивного ефекту при впровадженні запропонованого способу на фіг. 1 та 2 наведені результати напівнатурного моделювання поляризаційного фільтра, зокрема на фіг. 1а, 2а наведена суміш активної та пасивної завади, яка діє на вході основного каналу поляризаційного фільтра, на фіг. 1б та 2б наведено результат компенсації активної шумової завади на його виході, а на фіг. 1в та 2в наведено процес формування вагових коефіцієнтів як при одночасному впливі пасивної завади, так і за її відсутності. При цьому на фіг. 1 наведено результати обробки суміші завад з режекторними фільтрами в колах формування вагових коефіцієнтів, а на фіг. 2 без них. Із порівняння фіг. 1 та 2 можна зробити висновок, що фільтрація пасивної завади в колах формування вагових коефіцієнтів виключає можливість 1 UA 91114 U 5 10 15 20 25 30 переналаштування поляризаційного фільтра на пасивну заваду. Це забезпечує ефективну компенсацію активної шумової завади. Ще одною позитивною ознакою запропонованого способу є те, що частотна фільтрація пасивної завади в колах формування вагових коефіцієнтів виключає компенсацію корисних сигналів при застосуванні квазінеперервних сигналів в радіолокаторах. Суть способу, що заявляється, може бути додатково пояснена на прикладі приймальної частини радіолокатора, в якому використовується поляризаційна фільтрація активних шумових засад. Структурна схема приймальної частини радіолокатора наведена на фіг. 3. До схеми входить адаптивний поляризаційний фільтр 1, який складається з дуальнополяризованої двоканальної антени 2, основного 3 та компенсаційного 4 каналів прийому, автокомпенсатора активної шумової завади 5. До складу автокомпенсатора входять фільтри 6, помножувач 7, формувач вагових коефіцієнтів 8 та суматор 9. Крім цього, до складу приймальної частини радіолокатора входять пристрій перетворення Фур'є 10, виявляч корисних сигналів 11 та монітор 12. Приймальна частина радіолокатора, в якій реалізовано спосіб, що заявляється, працює наступним чином. На входи основного 3 та компенсаційного 4 каналів адаптивного фільтра 1 надходять як корисні сигнали, так і активні шумові та пасивні завади, які прийняті дуальнополяризованою антеною 2. Прийнята суміш сигналів та завад надходить на входи основного (див. фіг. 1а та 2а) та компенсаційного каналів автокомпенсатора 5, в якому за відсутності пасивної завади виконується ефективна компенсація активної шумової завади. В умовах дії на радіолокатор комбінованої завади (час від 0,1 до 0,2 мс на фіг. 1 та 2) за рахунок фільтрів 6 в колах формування вагових коефіцієнтів шляхом частотної фільтрації виконується придушення спектральних складових пасивної завади. Навіть при значному перевищенні рівня пасивної завади над активною (див. фіг. 1а) модуль вагового коефіцієнта автокомпенсатора 5 не змінює своєї величини на інтервалі одночасної дії пасивної завади, що стабілізує процес компенсації активної шумової завади. Це безпосередньо видно на фіг. їв в порівнянні з фіг. 2в. Дійсно, сумісний аналіз фіг. 1в та 2в показує, що за відсутності фільтрів 6 на інтервалі 0,1…0,2 мс, де одночасно з активною шумовою завадою діє пасивна завада, автокомпенсатор завад переналаштовувається на неї, що підтверджується флуктуаціями вагового коефіцієнта. Переналаштування автокомпенсатора також підтверджується суттєвим збільшенням модуля вагового коефіцієнта оскільки при моделюванні пасивна завада у основному каналі прийому перевищує її рівень в компенсаційному каналі (див., наприклад, фіг. 2а, де відношення осн. канал 1 ). При цьому: по-перше суттєво падає компенсація активної шумової становить комп. канал 2 35 40 45 50 55 завади, а по-друге погіршується виявлення корисних сигналів в часовому фільтрі внаслідок модуляції пасивної завади, яку безпосередньо видно на фіг. 2б. Таким чином, використання частотної фільтрації в колах формування вагових коефіцієнтів дозволяє забезпечити високу ефективність компенсації активної шумової завади при одночасній дії пасивної завади, а також забезпечує ефективне виділення корисних сигналів в часовому фільтрі на тлі пасивної завади. З виходу автокомпенсатора 5 суміш корисних сигналів та пасивних завад надходить на пристрій перетворення Фур'є 10, де виконується спектральне розділення корисних сигналів та пасивних завад. Після чого вони надходять на виявляч корисних сигналів 11, які в подальшому відображаються на моніторі 12. Джерела інформації: 1. Залевский, А.П. Оценка эффективности пространственно-временной и времяпространственной фильтрации сигналов в когерентно-импульсных РЛС [Текст] / А.П. Залевский, Д.М. Пиза, И.С. Пресняк, А.С. Сиренко // Радиоэлектроника, информатика, управление.-2012.№2.-С. 39-44. 2. Пат. 59472 Україна, МПК G01 S 7/36 Н04В 15/00. Спосіб захисту когерентно-імпульсної радіолокаційної станції від комбінованих завад [Електронний ресурс] / Д.М. Піза, О.П. Залевський, О.В. Рудик; заявл. 04.01.2011; опубл. 10.05.2011, Бюл. №9/2011 Режим доступу: http://base.uipv.org/searchINV/search.php?action=viewdetails&IdClaim=158879 3. Атлас облаков / Фе дер. служба по гидрометеорологии и мониторингу окружающей среды (Росгидромет), Гл. геофиз. обсерватория им. А.И. Воейкова; [Д.П. Беспалов и др.; ред.: Л.К. Сурыгина]. - Санкт-Петербург: Д'АРТ, 2011.-248 с. 2 UA 91114 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 Спосіб захисту радіолокаторів від комбінованих завад, діючих по головному променю діаграми спрямованості антени, за яким основним та компенсаційним каналами радіолокатора приймають корисні сигнали та завади, які діють по головному променю діаграми спрямованості антени, компенсують активну шумову задачу шляхом регулювання вагових коефіцієнтів поляризаційного фільтра, виконують селекцію корисних сигналів, наприклад, із застосуванням дискретного перетворення Фур'є, виявляють корисні сигнали на тлі пасивних завад та відображають виявлені радіолокаційні цілі на моніторі радіолокатора, який відрізняється тим, що в колах формування вагових коефіцієнтів поляризаційного фільтра виконують частотну фільтрацію пасивної складової комбінованої завади. 3 UA 91114 U Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюPiza Dmytro Makarovych
Автори російськоюПиза Дмитрий Макарович
МПК / Мітки
МПК: H04B 15/00, G01S 7/36
Мітки: діаграми, захисту, завад, променю, спосіб, спрямованості, антени, головному, радіолокаторів, діючих, комбінованих
Код посилання
<a href="https://ua.patents.su/6-91114-sposib-zakhistu-radiolokatoriv-vid-kombinovanikh-zavad-diyuchikh-po-golovnomu-promenyu-diagrami-spryamovanosti-anteni.html" target="_blank" rel="follow" title="База патентів України">Спосіб захисту радіолокаторів від комбінованих завад, діючих по головному променю діаграми спрямованості антени</a>
Спосіб захисту когерентно-імпульсної радіолокаційної станції від комбінованих завад
Номер патенту: 59472
Опубліковано: 10.05.2011
Автори: Піза Дмитро Макарович, Залевський Олексій Павлович, Рудик Олександр Володимирович
МПК: H04B 15/00, G01S 7/36
Мітки: захисту, спосіб, когерентно-імпульсної, станції, радіолокаційної, завад, комбінованих
Формула / Реферат:
Спосіб захисту когерентно-імпульсних радіолокаційних станцій від комбінованих завад, за яким основним та компенсаційним каналами РЛС приймають корисні сигнали та завади, компенсують активну шумову заваду шляхом регулювання вагових коефіцієнтів поляризаційного (або просторового) фільтра, виконують селекцію корисних сигналів, наприклад, із застосуванням дискретного перетворення Фур'є, виявляють корисні сигнали на тлі пасивних завад та...
Спосіб захисту когерентно-імпульсних радіолокаційних станцій від комбінованих завад
Номер патенту: 78120
Опубліковано: 11.03.2013
Автори: Піза Дмитро Макарович, Сіренко Андрій Сергійович
МПК: H04B 15/00, G01S 7/36
Мітки: когерентно-імпульсних, станцій, комбінованих, спосіб, радіолокаційних, захисту, завад
Формула / Реферат:
Спосіб захисту когерентно-імпульсних радіолокаційних станцій (РЛС) від комбінованих завад, за яким основним та компенсаційним каналами РЛС приймають корисні сигнали та завади, компенсують активну шумову заваду шляхом регулювання вагового коефіцієнту поляризаційного (або просторового) фільтра, виконують селекцію корисних сигналів, наприклад, із застосуванням дискретного перетворення Фур'є, виявляють корисні сигналі на тлі пасивних завад та...
Радіолокатор з компенсатором завад по бокових пелюстках діаграми спрямування антени
Номер патенту: 32192
Опубліковано: 15.12.2000
Автори: Кудрик Андрій Миколайович, Пророшин Сергій Михайлович, Бахвалов Валентин Борисович
МПК: G01S 7/36
Мітки: пелюстках, компенсатором, антени, завад, спрямування, діаграми, радіолокатор, бокових
Текст:
...з компенсатором завад по бокових пелюстках діаграми спрямування антени, що містить антенну систему з основної приймально-передавальної антени з антенним перемикачем і компенсаційну приймальну антену, передавач імпульсного сигналу, приймачі, пристрій віднімання та індикатор, згідно з винаходом антенна система виконана з однакових рознесених вздовж осі системи антен, перша з яких є основною, а друга - компенсаційною; до складу...
Спосіб завадозахисту когерентно-імпульсної рлс від комбінованих завад
Номер патенту: 89945
Опубліковано: 12.05.2014
Автори: Залевський Олексій Павлович, Піза Дмитро Макарович
МПК: G01S 7/36, H04B 15/00
Мітки: завадозахисту, завад, спосіб, комбінованих, когерентно-імпульсної, рлс
Формула / Реферат:
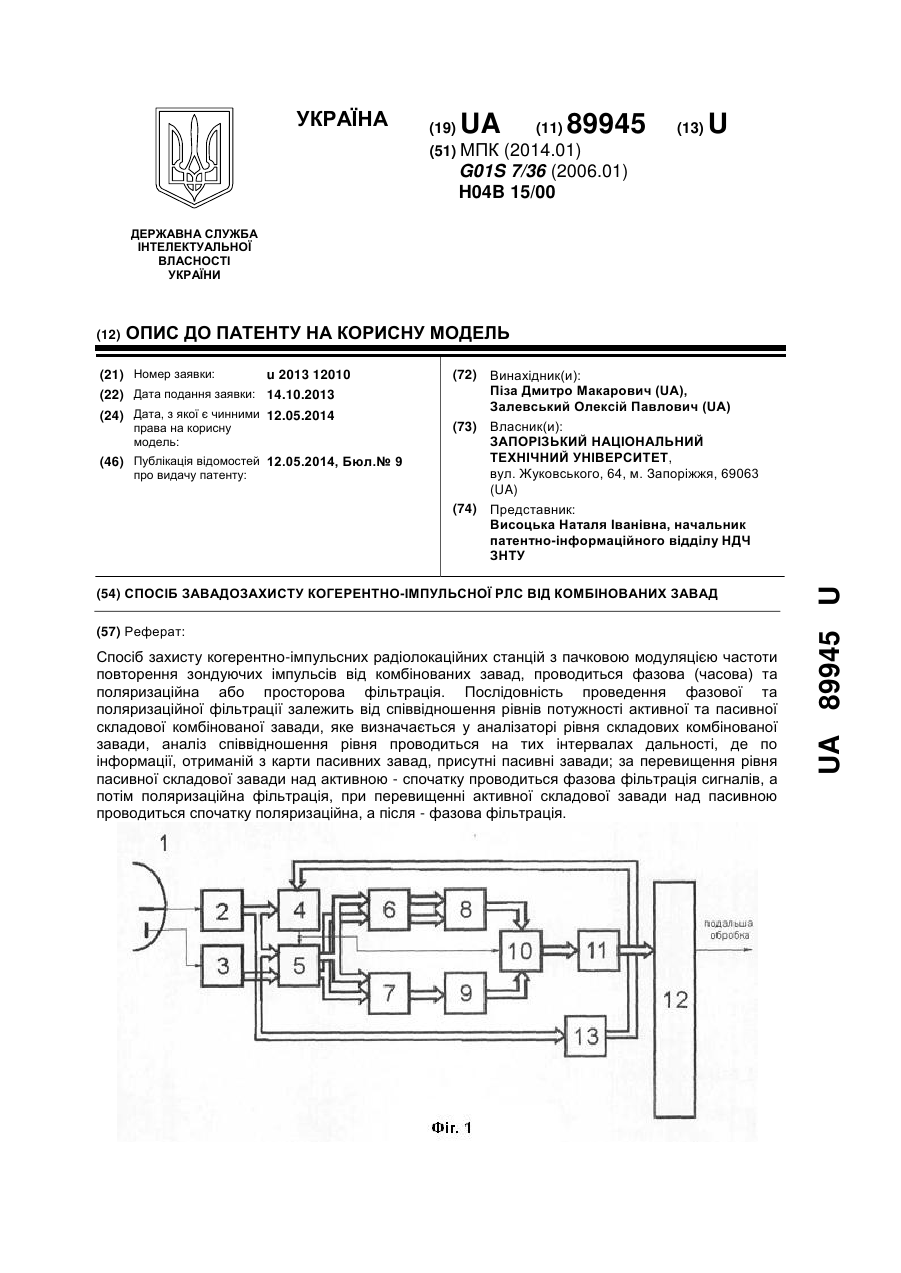
Спосіб захисту когерентно-імпульсних радіолокаційних станцій з пачковою модуляцією частоти повторення зондуючих імпульсів від комбінованих завад в якому, проводиться фазова (часова) та поляризаційна або просторова фільтрація, який відрізняється тим, що послідовність проведення фазової та поляризаційної фільтрації залежить від співвідношення рівнів потужності активної та пасивної складової комбінованої завади, яке визначається у аналізаторі...
Системи і способи формування діаграми спрямованості антени в системах зв’язку з множиною входів і множиною виходів
Номер патенту: 92741
Опубліковано: 10.12.2010
Автори: Горе Дхананджай Ашок, Горохов Алєксєй, Сампатх Хемантх, Кадоус Тамер
МПК: H04L 27/26, H04B 7/06
Мітки: виходів, формування, системах, зв'язку, антени, способи, діаграми, спрямованості, входів, системі, множиною
Формула / Реферат:
1. Апаратура безпровідного зв'язку, яка містить: щонайменше дві антени; іпроцесор, сконфігурований для генерації вагових коефіцієнтів для формування діаграми спрямованості антени для передачі символів в пристрій безпровідного зв'язку на основі інформації про канал, яка відповідає декільком трактам передачі, кількість яких більша одного, але менша, ніж загальна кількість трактів передачі з апаратури безпровідного зв'язку в пристрій...
Попередній патент: Спосіб отримання ентомопатогенного біопрепарату “комахоцид” для захисту сільскогосподарських і декоративних рослин від шкідників
Наступний патент: Ретенційний апарат після лікування сагітальних аномалій прикусу
Випадковий патент: Теплобульбашковий витратомір