Спосіб захисту когерентно-імпульсних радіолокаційних станцій від комбінованих завад
Номер патенту: 78120
Опубліковано: 11.03.2013
Формула / Реферат
Спосіб захисту когерентно-імпульсних радіолокаційних станцій (РЛС) від комбінованих завад, за яким основним та компенсаційним каналами РЛС приймають корисні сигнали та завади, компенсують активну шумову заваду шляхом регулювання вагового коефіцієнту поляризаційного (або просторового) фільтра, виконують селекцію корисних сигналів, наприклад, із застосуванням дискретного перетворення Фур'є, виявляють корисні сигналі на тлі пасивних завад та відображають виявлені радіолокаційні цілі на моніторі РЛС, причому регулювання вагового коефіцієнту поляризаційного (просторового) фільтра виконують в кожному періоді повторення на часових інтервалах, де пасивна завада відсутня, який відрізняється тим, що часові інтервали для підстроювання вагових коефіцієнтів визначають шляхом оцінювання розподілу коефіцієнта міжканальної кореляції (КМК) по розгортці дальності, а саме значення КМК протягом розгортки дальності послідовно розраховують на інтервалах, довжина яких відповідає часу налаштування вагового коефіцієнту автокомпенсатора, та запам'ятовують, далі серед цих значень знаходять максимальне та запам'ятовують на якому інтервалі часу (дальності) воно спостерігалось, а в наступній розгортці дальності настроювання вагового коефіцієнта автокомпенсатора виконують саме на цьому інтервалі часу (дальності).
Текст
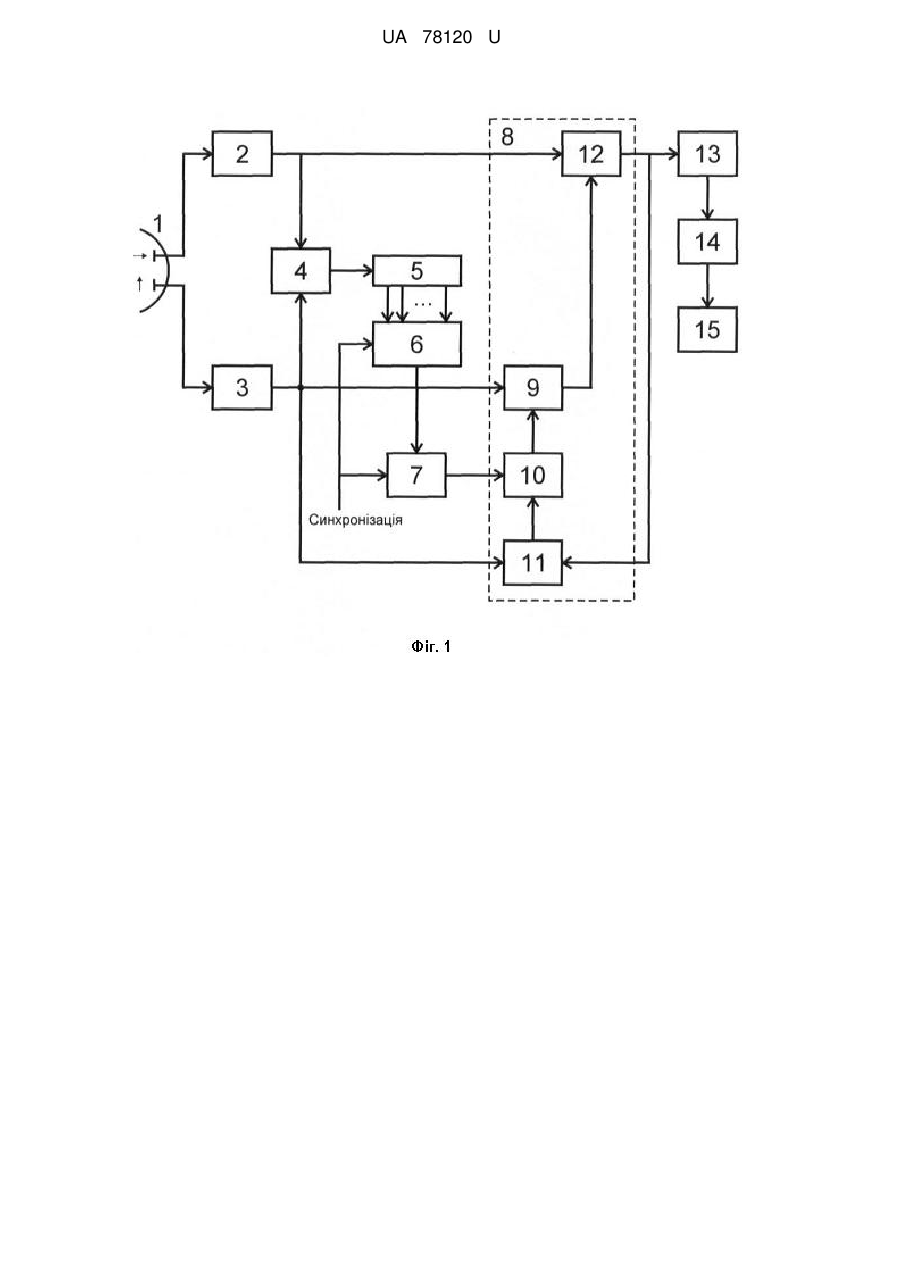
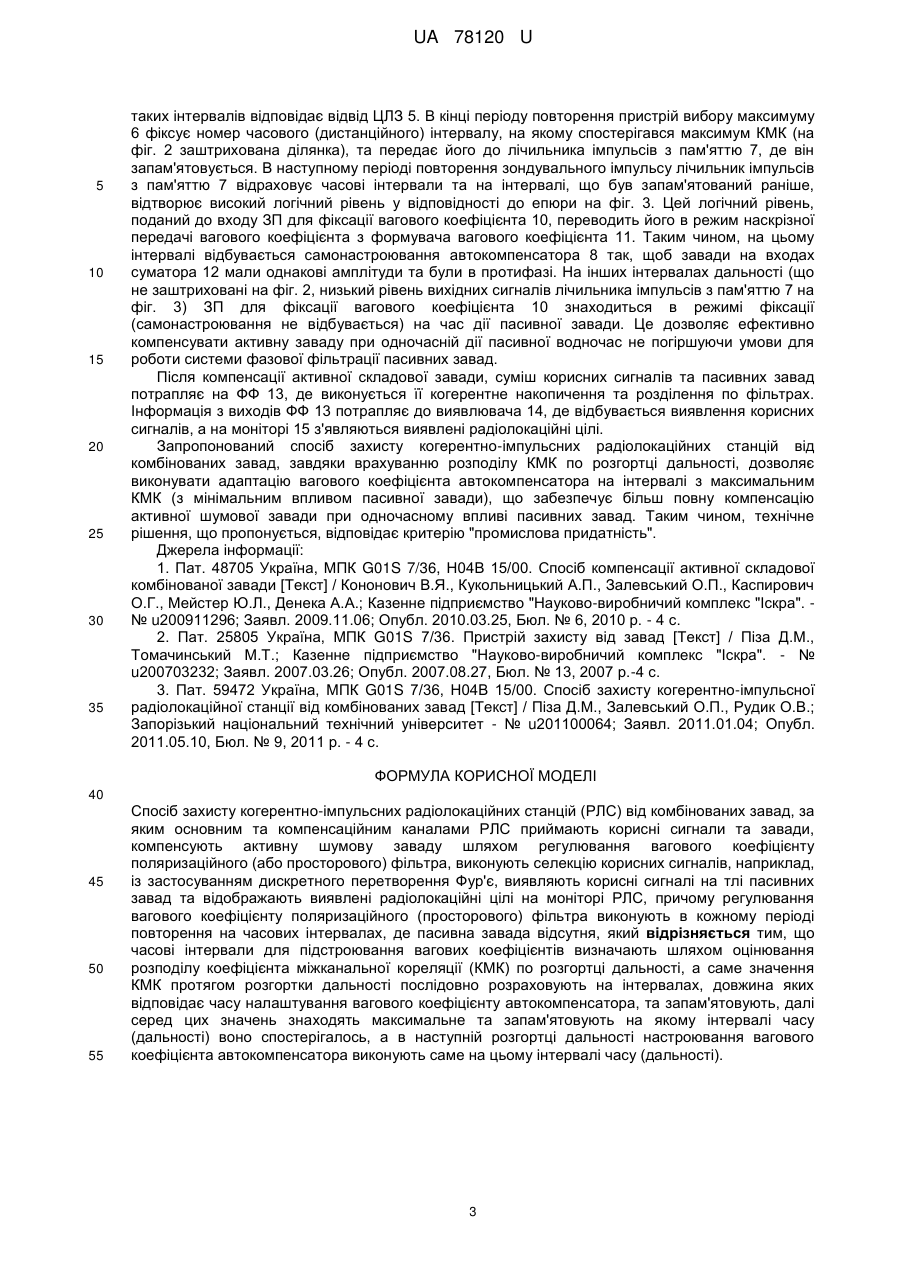
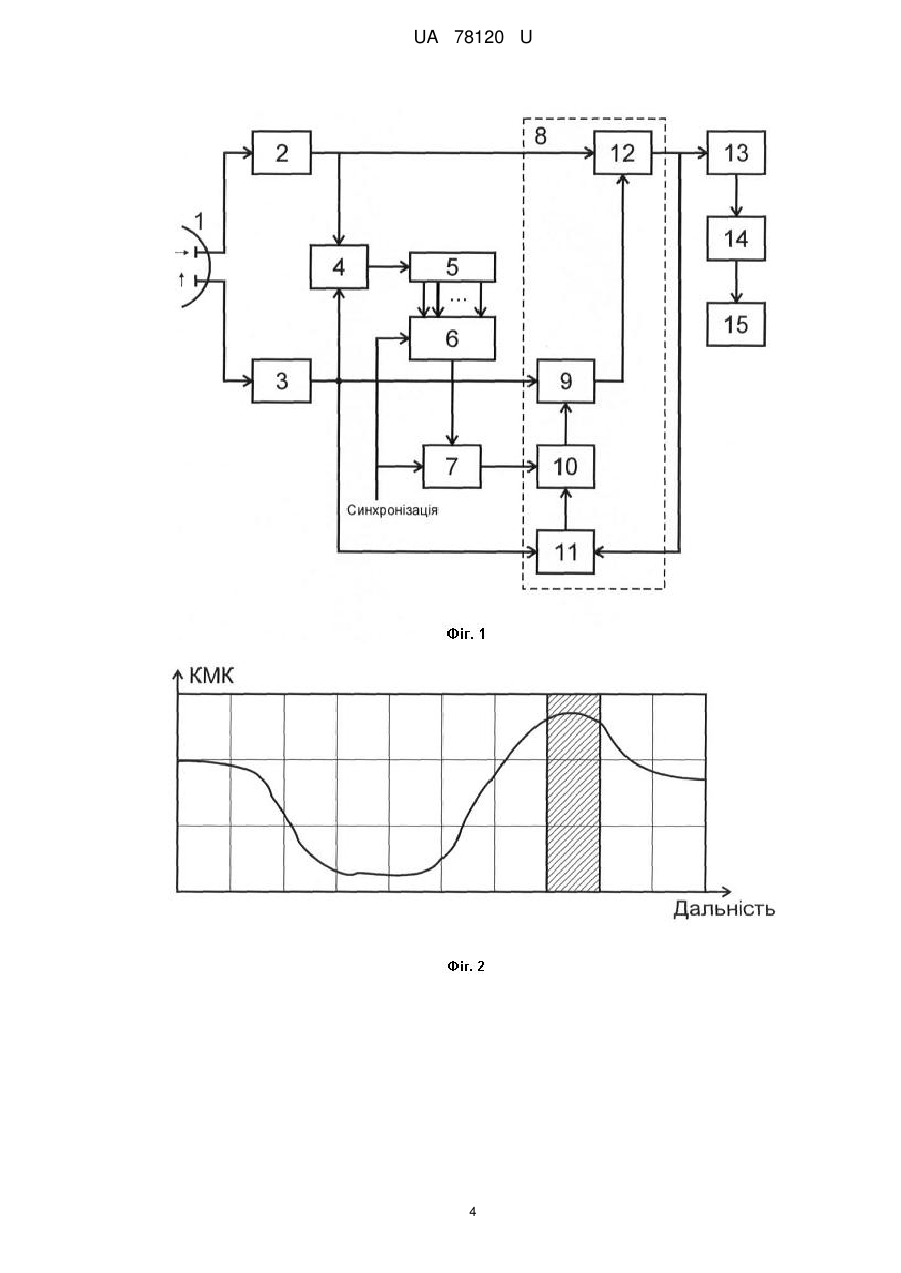
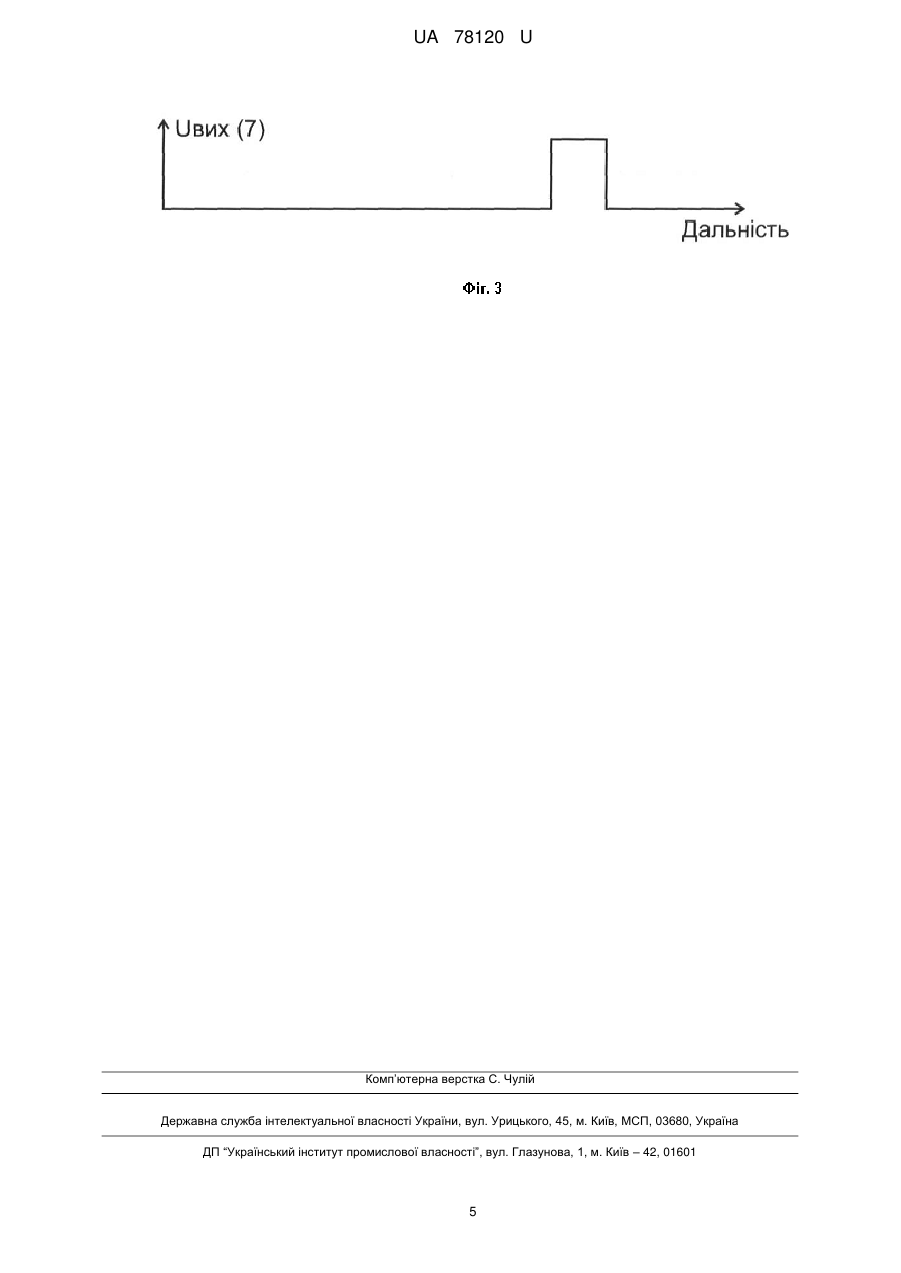
Реферат: Спосіб захисту когерентно-імпульсних радіолокаційних станцій (РЛС) від комбінованих завад, за яким основним та компенсаційним каналами РЛС приймають корисні сигнали та завади, компенсують активну шумову заваду шляхом регулювання вагового коефіцієнту поляризаційного (або просторового) фільтра, виконують селекцію корисних сигналів, наприклад, із застосуванням дискретного перетворення Фур'є, виявляють корисні сигналі на тлі пасивних завад та відображають виявлені радіолокаційні цілі на моніторі РЛС. Часові інтервали для підстроювання вагових коефіцієнтів визначають шляхом оцінювання розподілу коефіцієнта міжканальної кореляції (КМК) по розгортці дальності, а саме значення КМК протягом розгортки дальності послідовно розраховують на інтервалах, довжина яких відповідає часу налаштування вагового коефіцієнту автокомпенсатора, та запам'ятовують. Далі серед цих значень знаходять максимальне та запам'ятовують на якому інтервалі часу (дальності) воно спостерігалось. В наступній розгортці дальності настроювання вагового коефіцієнта автокомпенсатора виконують саме на цьому інтервалі часу (дальності). UA 78120 U (12) UA 78120 U UA 78120 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі радіолокації та може бути застосованою для підвищення ефективності завадозахисту когерентно-імпульсних радіолокаційних станцій (РЛС) в умовах одночасної дії пасивних завад та активних шумових завад. Відомий спосіб завадозахисту когерентно-імпульсної РЛС [1], за яким: основним та компенсаційним каналами РЛС приймають корисні сигнали та завади, виконують фазову (часову) фільтрацію, наприклад, із застосуванням дискретного перетворення Фур'є (ДПФ), компенсують активну шумову заваду шляхом регулювання амплітуди та фази активної шумової завади, прийнятої компенсаційним каналом, та додавання її до основного каналу, виявляють корисні сигнали на тлі пасивних завад та відображають виявлені радіолокаційні цілі на моніторі. Недоліком такого способу є низька завадозахищеність РЛС від активних шумових завад, що обумовлено інтерференційними явищами при скануванні простору двома рознесеними у просторі антенами. Відомий спосіб захисту когерентно-імпульсних РЛС від комбінованих завад [2], за яким після приймання корисних сигналів та завад основним та компенсаційним каналами, спочатку компенсують активну шумову заваду, а потім виконують процедуру фазової (часової) фільтрації та виявлення корисних сигналів, а також відображають на моніторі РЛС виявлені цілі. Особливістю цього способу є те, що обчислення вагових коефіцієнтів для компенсації активних шумових завад виконують в кінці періоду повторення зондуючих імпульсів (в кінці розгортки дальності) кожної частотної пачки. Недоліком цього способу є те, що навіть на граничній дальності дії РЛС при великій ефективній площі розсіяння, наприклад, гідрометеорів, рівень перевіддзеркалень від них може бути значно більшим від рівня діючої активної шумової завади. В цьому випадку компенсація останньої, внаслідок малої міжканальної кореляції, буде малоефективною. Із відомих способів захисту когерентно-імпульсних РЛС від комбінованих завад, прийнятий за прототип, є спосіб з використанням порогової обробки коефіцієнта міжканальної кореляції (КМК) для керування алгоритмом адаптації вагових коефіцієнтів при компенсації активних шумових завад [3]. За цим способом основним та компенсаційним каналами РЛС приймають корисні сигнали та завади, компенсують активну шумову заваду, виконують процедуру фазової фільтрації і виявлення корисних сигналів та відображають виявлені радіолокаційні цілі на моніторі РЛС, причому формування вагових коефіцієнтів автокомпенсатора виконують в кожному періоді повторення на часових інтервалах, де пасивна завада відсутня, при цьому часові інтервали для підстроювання вагових коефіцієнтів визначають шляхом поточного оцінювання коефіцієнта міжканальної кореляції (КМК) по розгортці дальності. Якщо значення коефіцієнта міжканальної кореляції перевищує заздалегідь задане порогове значення, що свідчить про відсутність на інтервалі дальності пасивної складової комбінованої завади, тоді дозволяється настроювання вагового коефіцієнта автокомпенсатора на цьому інтервалі для найбільш ефективної компенсації активної складової комбінованої завади. У протилежному випадку (при КМК меншому за порогове значення) значення вагового коефіцієнта, яке було отримано раніше (на інтервалі дальності, де була відсутня пасивна складова комбінованої завади), фіксується у запам'ятовувальному пристрої та використовується для роботи автокомпенсатора. Недоліком цього способу є те, що для прийняття рішення щодо наявності або відсутності пасивної складової комбінованої завади використовується пороговий пристрій, який не дозволяє враховувати характер розподілу КМК по розгортці дальності, зокрема максимальне значення КМК. В основу корисної моделі поставлена задача розробки способу захисту когерентноімпульсних РЛС від комбінованих завад, який забезпечує більш високу ефективність пригнічення активних шумових завад в умовах одночасної дії пасивних завад за рахунок оцінювання розподілу КМК по розгортці дальності. Вирішення цієї задачі досягається способом захисту когерентно-імпульсних радіолокаційних станцій від комбінованих завад, за яким основним та компенсаційним каналами РЛС приймають корисні сигнали та завади, компенсують активну шумову заваду шляхом регулювання вагового коефіцієнту поляризаційного (або просторового) фільтра, виконують селекцію корисних сигналів, наприклад, із застосуванням дискретного перетворення Фур'є, виявляють корисні сигналі на тлі пасивних завад та відображають виявлені радіолокаційні цілі на моніторі РЛС, причому регулювання вагового коефіцієнту поляризаційного (просторового) фільтра виконують в кожному періоді повторення на часових інтервалах, де пасивна завада відсутня, а часові інтервали для підстроювання вагових коефіцієнтів визначають шляхом оцінювання розподілу коефіцієнта міжканальної кореляції (КМК) по розгортці дальності, а саме значення КМК протягом розгортки дальності послідовно розраховують на інтервалах, довжина яких відповідає 1 UA 78120 U 5 10 15 20 25 30 35 40 45 50 55 60 часу налаштування вагового коефіцієнту автокомпенсатора, та запам'ятовують, далі серед цих значень знаходять максимальне та запам'ятовують на якому інтервалі часу (дальності) воно спостерігалось, а в наступній розгортці дальності настроювання вагового коефіцієнта автокомпенсатора виконують саме на цьому інтервалі часу (дальності). Якщо коефіцієнт міжканальної кореляції на деякому інтервалі часу (дальності) має максимальне значення, що свідчить про найменший вплив пасивної складової комбінованої завади на роботу автокомпенсатора на цьому інтервалі, то значення вагового коефіцієнта, налаштоване на цьому інтервалі буде оптимальним. Це значення і буде застосовуватися для придушення активної складової комбінованої завади. У протилежному випадку, при менших значеннях коефіцієнта міжканальної кореляції, для компенсації активної складової завади застосовується значення вагового коефіцієнта, яке було отримано раніше, на інтервалі дальності, де вплив пасивної складової комбінованої завади був мінімальним. У порівнянні з прототипом відмінною ознакою є те, що у запропонованому способі для визначення часового інтервалу для підстроювання вагового коефіцієнту при компенсації активних шумових завад виконують оцінювання розподілу КМК по розгортці дальності, а отже про наявність чи відсутність пасивної завади, яка, як правило, є нестаціонарною. Використання для формування вагового коефіцієнту часового інтервалу з максимальною міжканальною кореляцією, дозволяє мінімізувати вплив пасивної складової комбінованої завади на адаптацію вагового коефіцієнту, що забезпечує більш високу ефективність компенсації активної шумової завади навіть на інтервалах дальності, де мають місце як активна, так і пасивна завади. Саме використання оцінювання розподілу КМК дозволяє визначати інтервал часу (дальності) з максимальним значенням КМК, що відповідає мінімальному впливу пасивної складової комбінованої завади на роботу автокомпенсатора, на відміну від порогової обробки значень КМК у прототипі. Тому у технічному рішенні, що заявляється, нові технічні ознаки при взаємодії з відомими дають новий технічний результат, що дозволяє вирішити поставлену задачу. Це забезпечує усій заявлений сукупності ознак відповідність критерію "новизна" та приводить до нових технічних результатів. Суть способу, що заявляється, може бути пояснена на прикладі РЛС, в якій застосована поляризаційна фільтрація активних шумових завад. Структурна схема приймання та обробки сигналів РЛС, в якій використовується запропонований спосіб, наведена на фіг. 1. До складу системи приймання та обробки РЛС входять дуальнополяризована антена 1, основний 2 та компенсаційний 3 приймальні канали, корелятор 4, цифрова лінія затримки (ЦЛЗ) 5, пристрій вибору максимуму 6, лічильник імпульсів з пам'яттю 7, автокомпенсатор 8, який складається з керованого підсилювача 9, запам'ятовуючого пристрою (ЗП) для фіксації вагового коефіцієнта 10, формувача вагового коефіцієнта 11 та суматора 12, а також пристрій фазової фільтрації 13 (ФФ), виявлювач 14 та монітор 15. Виходи дуальнополяризованої антени 1 підключені до основного 2 та компенсаційного 3 приймальних каналів. Вихід основного приймального каналу 2 підключено до входу суматора 12 автокомпенсатора 8. Вихід компенсаційного приймального каналу 3 підключено до входу формувача вагового коефіцієнта 11 та до другого входу суматора 12 через керований підсилювач 9. Вихід суматора 12 підключений до другого входу формувача вагового коефіцієнта 11 та до послідовно з'єднаних пристрою фазової фільтрації 13, виявлювача 14 та монітора 15. Вихід формувача вагового коефіцієнта 11 через ЗП для фіксації вагового коефіцієнта 10 підключений до входу вибору коефіцієнта керованого підсилювача 9. Виходи основного 2 та компенсаційного 3 приймальних каналів підключені також до корелятора 4, вихідний сигнал якого подається до ЦЛЗ 5 для запам'ятовування. Відводи від ЦЛЗ виконані з кроком, що відповідає часу настоювання автокомпенсатора. Відводи ЦЛЗ 5 підключені до пристрою вибору максимуму 6, який передає номер входу з максимальним значенням до лічильника імпульсів з пам'яттю 7. На входи синхронізації пристрою вибору максимуму 6 та лічильника імпульсів з пам'яттю 7 підключено сигнал синхронізації, який надходить від передавальної частини РЛС (на фіг. 1 не показано). Лічильник імпульсів з пам'яттю 7 підключений до входу ЗП для фіксації вагового коефіцієнта 10. Схема приймання та обробки сигналів РЛС, в якій застосовано спосіб, що заявляється, працює наступним чином. В процесі роботи РЛС дуальнополяризованою антеною 1 приймаються як корисні сигнали, так і активні та пасивні завади, які надходять до основного 2 та компенсаційного 3 приймальних каналів та потрапляють до корелятора 4. Вихід корелятора 4 підключено до ЦЛЗ 5, в якій запам'ятовується розподіл КМК по всій розгортці дальності (див. фіг. 2). Вся розгортка дальності (період повторення зондувальних імпульсів) поділяється на рівні інтервали, тривалість яких відповідає часу налаштування автокомпенсатора 8. Кожному з 2 UA 78120 U 5 10 15 20 25 30 35 таких інтервалів відповідає відвід ЦЛЗ 5. В кінці періоду повторення пристрій вибору максимуму 6 фіксує номер часового (дистанційного) інтервалу, на якому спостерігався максимум КМК (на фіг. 2 заштрихована ділянка), та передає його до лічильника імпульсів з пам'яттю 7, де він запам'ятовується. В наступному періоді повторення зондувального імпульсу лічильник імпульсів з пам'яттю 7 відраховує часові інтервали та на інтервалі, що був запам'ятований раніше, відтворює високий логічний рівень у відповідності до епюри на фіг. 3. Цей логічний рівень, поданий до входу ЗП для фіксації вагового коефіцієнта 10, переводить його в режим наскрізної передачі вагового коефіцієнта з формувача вагового коефіцієнта 11. Таким чином, на цьому інтервалі відбувається самонастроювання автокомпенсатора 8 так, щоб завади на входах суматора 12 мали однакові амплітуди та були в протифазі. На інших інтервалах дальності (що не заштриховані на фіг. 2, низький рівень вихідних сигналів лічильника імпульсів з пам'яттю 7 на фіг. 3) ЗП для фіксації вагового коефіцієнта 10 знаходиться в режимі фіксації (самонастроювання не відбувається) на час дії пасивної завади. Це дозволяє ефективно компенсувати активну заваду при одночасній дії пасивної водночас не погіршуючи умови для роботи системи фазової фільтрації пасивних завад. Після компенсації активної складової завади, суміш корисних сигналів та пасивних завад потрапляє на ФФ 13, де виконується її когерентне накопичення та розділення по фільтрах. Інформація з виходів ФФ 13 потрапляє до виявлювача 14, де відбувається виявлення корисних сигналів, а на моніторі 15 з'являються виявлені радіолокаційні цілі. Запропонований спосіб захисту когерентно-імпульсних радіолокаційних станцій від комбінованих завад, завдяки врахуванню розподілу КМК по розгортці дальності, дозволяє виконувати адаптацію вагового коефіцієнта автокомпенсатора на інтервалі з максимальним КМК (з мінімальним впливом пасивної завади), що забезпечує більш повну компенсацію активної шумової завади при одночасному впливі пасивних завад. Таким чином, технічне рішення, що пропонується, відповідає критерію "промислова придатність". Джерела інформації: 1. Пат. 48705 Україна, МПК G01S 7/36, Н04В 15/00. Спосіб компенсації активної складової комбінованої завади [Текст] / Кононович В.Я., Кукольницький А.П., Залевський О.П., Каспирович О.Г., Мейстер Ю.Л., Денека А.А.; Казенне підприємство "Науково-виробничий комплекс "Іскра". № u200911296; Заявл. 2009.11.06; Опубл. 2010.03.25, Бюл. № 6, 2010 р. - 4 с. 2. Пат. 25805 Україна, МПК G01S 7/36. Пристрій захисту від завад [Текст] / Піза Д.М., Томачинський М.Т.; Казенне підприємство "Науково-виробничий комплекс "Іскра". - № u200703232; Заявл. 2007.03.26; Опубл. 2007.08.27, Бюл. № 13, 2007 р.-4 с. 3. Пат. 59472 Україна, МПК G01S 7/36, Н04В 15/00. Спосіб захисту когерентно-імпульсної радіолокаційної станції від комбінованих завад [Текст] / Піза Д.М., Залевський О.П., Рудик О.В.; Запорізький національний технічний університет - № u201100064; Заявл. 2011.01.04; Опубл. 2011.05.10, Бюл. № 9, 2011 р. - 4 с. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 40 45 50 55 Спосіб захисту когерентно-імпульсних радіолокаційних станцій (РЛС) від комбінованих завад, за яким основним та компенсаційним каналами РЛС приймають корисні сигнали та завади, компенсують активну шумову заваду шляхом регулювання вагового коефіцієнту поляризаційного (або просторового) фільтра, виконують селекцію корисних сигналів, наприклад, із застосуванням дискретного перетворення Фур'є, виявляють корисні сигналі на тлі пасивних завад та відображають виявлені радіолокаційні цілі на моніторі РЛС, причому регулювання вагового коефіцієнту поляризаційного (просторового) фільтра виконують в кожному періоді повторення на часових інтервалах, де пасивна завада відсутня, який відрізняється тим, що часові інтервали для підстроювання вагових коефіцієнтів визначають шляхом оцінювання розподілу коефіцієнта міжканальної кореляції (КМК) по розгортці дальності, а саме значення КМК протягом розгортки дальності послідовно розраховують на інтервалах, довжина яких відповідає часу налаштування вагового коефіцієнту автокомпенсатора, та запам'ятовують, далі серед цих значень знаходять максимальне та запам'ятовують на якому інтервалі часу (дальності) воно спостерігалось, а в наступній розгортці дальності настроювання вагового коефіцієнта автокомпенсатора виконують саме на цьому інтервалі часу (дальності). 3 UA 78120 U 4 UA 78120 U Комп’ютерна верстка С. Чулій Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for protection of coherent-pulse radar stations against combined interferences
Автори англійськоюPiza Dmytro Makarovych, Sirenko Andrii Serhiiovych
Назва патенту російськоюСпособ защиты когерентно-импульсных радиолокационных станций от комбинированных помех
Автори російськоюПиза Дмитрий Макарович, Сиренко Андрей Сергеевич
МПК / Мітки
МПК: G01S 7/36, H04B 15/00
Мітки: когерентно-імпульсних, спосіб, комбінованих, захисту, радіолокаційних, завад, станцій
Код посилання
<a href="https://ua.patents.su/7-78120-sposib-zakhistu-kogerentno-impulsnikh-radiolokacijjnikh-stancijj-vid-kombinovanikh-zavad.html" target="_blank" rel="follow" title="База патентів України">Спосіб захисту когерентно-імпульсних радіолокаційних станцій від комбінованих завад</a>
Спосіб захисту когерентно-імпульсної радіолокаційної станції від комбінованих завад
Номер патенту: 59472
Опубліковано: 10.05.2011
Автори: Піза Дмитро Макарович, Рудик Олександр Володимирович, Залевський Олексій Павлович
МПК: G01S 7/36, H04B 15/00
Мітки: захисту, комбінованих, спосіб, завад, станції, когерентно-імпульсної, радіолокаційної
Формула / Реферат:
Спосіб захисту когерентно-імпульсних радіолокаційних станцій від комбінованих завад, за яким основним та компенсаційним каналами РЛС приймають корисні сигнали та завади, компенсують активну шумову заваду шляхом регулювання вагових коефіцієнтів поляризаційного (або просторового) фільтра, виконують селекцію корисних сигналів, наприклад, із застосуванням дискретного перетворення Фур'є, виявляють корисні сигнали на тлі пасивних завад та...
Адаптивна система захисту корабельних радіолокаційних станцій виявлення повітряних цілей від активних шумових завад з повільною просторово-поляризаційною структурою
Номер патенту: 78101
Опубліковано: 11.03.2013
Автори: Харланов Олексій Володимирович, Поповнін Юрій Михайлович
МПК: G01S 7/36
Мітки: активних, корабельних, повільною, радіолокаційних, цілей, структурою, виявлення, система, адаптивна, шумових, станцій, завад, повітряних, просторово-поляризаційною, захисту
Формула / Реферат:
Адаптивна система захисту корабельних радіолокаційних станцій виявлення повітряних цілей від активних шумових завад з повільною просторово-поляризаційною структурую, яка складається: з цифрової антенної решітки (1) з біортогональними елементами, складові яких настроєні на прийом вертикально (2) й горизонтально (3) поляризованих електромагнітних хвиль відповідно; двох просторових адаптивних фільтрів (11), які пов'язані зі складовими антенних...
Цифрова система компенсації несинхронних імпульсних завад
Номер патенту: 58183
Опубліковано: 15.07.2003
Автори: Часовський Валентин Олександрович, Чорнобородов Михайло Петрович, Чорнобородова Наталя Петрівна
МПК: G01S 7/36
Мітки: імпульсних, завад, несинхронних, цифрова, компенсації, система
Формула / Реферат:
Цифрова система компенсації несинхронних імпульсних завад, що містить запам'ятовуючий пристрій, вхід якого з'єднаний з входом системи і входом блока фазових фільтрів, вхід якого також приєднаний до входу системи, а його вихід приєднаний до його ж входу, блок виявлення та обчислення параметрів несинхронної імпульсної завади, основний вихід якого приєднаний до другого входу суматора, перший вхід якого приєднаний до виходу запам'ятовуючого...
Цифрова система компенсації несинхронних імпульсних завад
Номер патенту: 46625
Опубліковано: 15.05.2002
Автори: Часовський Валентин Олександрович, Чорнобородов Михайло Петрович
МПК: G01S 7/36
Мітки: завад, компенсації, несинхронних, система, імпульсних, цифрова
Формула / Реферат:
Цифрова система компенсації несинхронних імпульсних завад, у якій використовується дворазове перетворення Фур'є для визначення параметрів несинхронної імпульсної завади, що містить запам'ятовуючий пристрій, вхід якого з'єднаний із входом системи, суматор, один із входів якого з'єднаний з виходом запам'ятовуючого пристрою, а вихід з'єднаний з виходом системи, блок фазових фільтрів, вхід якого з'єднаний із входом системи, яка відрізняється тим,...
Пристрій для захисту від активних завад
Номер патенту: 19475
Опубліковано: 15.12.2006
Автори: ТОМАЧИНСЬКИЙ МИКОЛА ТИМОФІЙОВИЧ, Піза Дмитро Макарович, Громаковський Володимир Васильович
МПК: G01S 1/00
Мітки: завад, активних, пристрій, захисту
Формула / Реферат:
Пристрій для захисту від активних завад, що містить гостронаправлену антену, допоміжну ненаправлену антену, основний і компенсаційний канали прийому, блок автокомпенсатора, перший вхід якого з'єднаний з виходом приймача основного каналу прийому, другий вхід автокомпенсатора з'єднаний через підсилювальний блок з виходом приймача компенсаційного каналу прийому, який відрізняється тим, що в каналах прийому введені блок нормування вхідного...
Попередній патент: Підшипниковий щит потужних електричних машин
Наступний патент: Середовище для заморожування сперми бугаїв з антиоксидантним препаратом “емоксипін”
Випадковий патент: Електророзрядна ексиплексна лампа з випромінюванням у синьо-зеленій області спектра