Спосіб керування роботою тиристорного електроприводу постійного струму при аномальних явищах в напрузі живильної мережі
Номер патенту: 92068
Опубліковано: 25.07.2014
Автори: Довженко Володимир Порфирович, Жигало Володимир Олександрович, Вакульчик Володимир Григорович

Формула / Реферат
Спосіб керування роботою тиристорного електроприводу постійного струму при аномальних явищах в напрузі живильної мережі, що включає визначення режиму роботи електродвигуна (випрямний або інверторний), вимірювання величини напруги живильної мережі і значення ЕРС (швидкості) електродвигуна, порівняння вимірюваних величин і формування сигналу в систему автоматичного керування приводом при наближенні співвідношення вимірюваних величин до небезпечної межі, який відрізняється тим, що при наближенні співвідношення вимірюваних величин (напруги живильної мережі і ЕРС електродвигуна) до небезпечної межі, змінюють структуру системи автоматичного регулювання швидкості привідного електродвигуна, а саме: шунтують інтегральну складову регуляторів струму і швидкості, відключають коло задання швидкості від входу вузла задання інтенсивності швидкості ЗІШ і переводять його в режим стеження з максимальним темпом по фактичній швидкості (ЕРС) привідного електродвигуна, при цьому кути керування в системі імпульсно-фазового керування СІФУ встановлюють без затримки в зону обмеження максимальних значень, а після відновлення рівня напруги живлення регулятори струму і швидкості в обох режимах (випрямному і інверторному) знову переводять в режим ПІ-регулятора, відновлюють схему кола задання швидкості до задатчика інтенсивності швидкості ЗІШ і зменшують кути керування в системі СІФУ експоненціально з постійною часу, еквівалентною постійній часу регулятора струму, а при більшому значенні швидкості (ЕРС) електродвигуна і при більш глибокому зниженні напруги живлення або при її просіданні в інверторному режимі роботи електродвигуна відключають автоматичний вимикач в колі навантаження до появи в ньому аварійного струму.
Текст
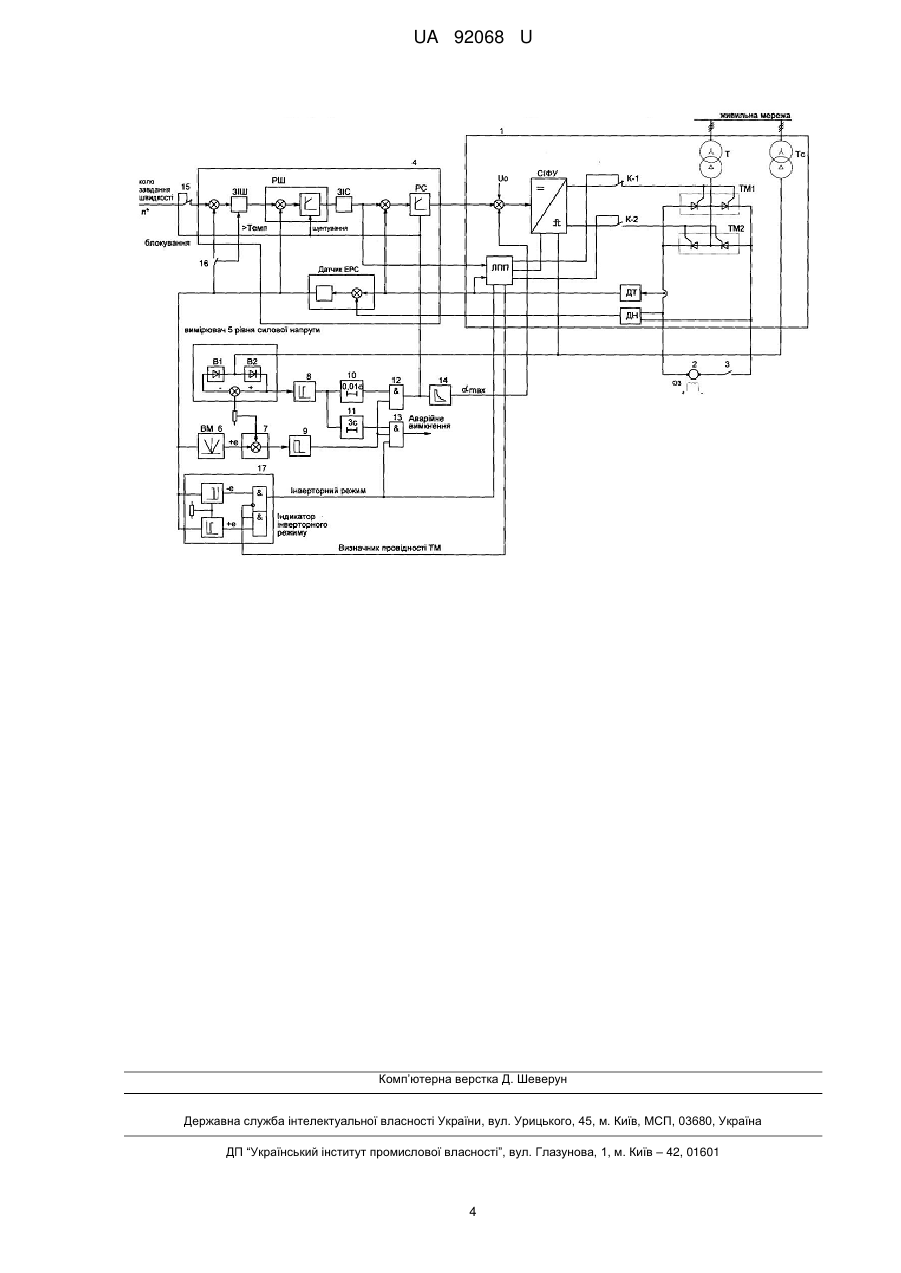
Реферат: Спосіб керування роботою тиристорного електроприводу постійного струму при аномальних явищах в напрузі живильної мережі включає визначення режиму роботи електродвигуна (випрямний або інверторний), вимірювання величини напруги живильної мережі і значення ЕРС (швидкості) електродвигуна, порівняння вимірюваних величин і формування сигналу в систему автоматичного керування приводом при наближенні співвідношення вимірюваних величин до небезпечної межі. При наближенні співвідношення вимірюваних величин (напруги живильної мережі і ЕРС електродвигуна) до небезпечної межі, змінюють структуру системи автоматичного регулювання швидкості привідного електродвигуна, а саме: шунтують інтегральну складову регуляторів струму і швидкості, відключають коло задання швидкості від входу вузла задання інтенсивності швидкості ЗІШ і переводять його в режим стеження з максимальним темпом по фактичній швидкості (ЕРС) привідного електродвигуна. UA 92068 U (12) UA 92068 U UA 92068 U 5 10 15 20 25 30 35 40 45 50 55 60 Спосіб належить до електротехніки, а саме до силової перетворювальної техніки, і може бути використаний для керування тиристорним електроприводом постійного струму, встановленим у відповідальних механізмах виробництв, які несуть великі технологічні втрати, викликані просіданням або зниженням живлячої напруги. Відомий спосіб [1] підвищення стійкості роботи електроприводу, при якому визначають режим його роботи (випрямний або інверторний), а також вимірюють напругу живильної мережі і при неприпустимому її зниженні в випрямному режимі блокують керуючі імпульси, але не відключають автоматичний вимикач в колі навантаження. У інверторному режимі при такій же ситуації формують сигнал на відключення вимикача до появи аварійного струму. Однак цей спосіб має обмежені функціональні можливості, оскільки не враховуються при цьому процеси, які відбуваються в системі регулювання електроприводу і не враховується величина ЕРС привідного двигуна. Відомий спосіб [2] підвищення стійкості роботи електроприводу при зниженні напруги мережі живлення, при якому вимірюють величину напруги живильної мережі вентильного перетворювача і величину напруги або ЕРС на його виході, виконують порівняння вимірюваних величин і, при наближенні їх співвідношення до небезпечної межі, формують сигнал через регулятор струму і напруги системи автоматичного регулювання на зменшення струму збудження і ЕРС привідного двигуна. Недоліком цього способу є те, що стійкість електроприводу в випрямному режимі його роботи при такому способі не підвищується, а зменшення ЕРС в режимі інвертування (гальмування) за допомогою зменшення струму збудження через велику інерційность кола малоефективне. Крім того, при роботі з двозонною системою регулювання з ослабленим потоком збудження при великому пониженні напруги живлення або її просіданні застосування такого способу неприпустимо. Задачею корисної моделі є підвищення стійкості роботи тиристорного електроприводу постійного струму при аномальних явищах в напрузі живильної мережі як в випрямному, так і інверторному режимах роботи. Поставлена задача вирішується тим, що в способі керування роботою тиристорного електроприводу постійного струму при аномальних явищах в напрузі живильної мережі, що включає визначення режиму роботи електродвигуна (випрямний або інверторний), вимірювання величини напруги живильної мережі і значення ЕРС (швидкості) електродвигуна, порівняння вимірюваних величин і формування сигналу в систему автоматичного керування приводом при наближенні співвідношення вимірюваних величин до небезпечної межі, змінюють структуру системи автоматичного регулювання швидкості привідного електродвигуна, а саме: шунтують інтегральну складову регуляторів струму і швидкості, відключають коло задання швидкості від входу вузла задання інтенсивності швидкості ЗІШ і переводять його в режим стеження з максимальним темпом по фактичній швидкості (ЕРС) привідного електродвигуна, при цьому кути керування в системі імпульсно-фазового керування СІФУ встановлюють без затримки в зону обмеження максимальних значень, а після відновлення рівня напруги живлення регулятори струму і швидкості в обох режимах (випрямному і інверторному) знову переводять в режим ПІ-регулятора, відновлюють зв'язок кола задання швидкості з задатчиком інтенсивності швидкості ЗІШ і зменшують кути керування в системі СІФУ експоненціально з постійною часу, еквівалентною постійній часу регулятора струму, а при більшому значенні швидкості (ЕРС) електродвигуна і при більш глибокому зниженні напруги живлення або при її просіданні в інверторному режимі роботи електродвигуна відключають автоматичний вимикач в колі навантаження до появи в ньому аварійного струму. На кресленні зображена функціональна схема, яка пояснює роботу запропонованого способу. Вона містить реверсивний перетворювач 1, що складається з силового живильного трансформатора Т, трансформатора синхронізації Тс, тиристорних мостів ТМ1, ТМ2, ключів К1, К2 подачі керуючих імпульсів, сформованих у вузлі системи імпульсно-фазового управління СІФУ, відповідно на тиристорні мости ТМ1, ТМ2, логічного перемикаючого пристрою ЛПП, керуючого вмиканням ключів К1, К2 для заданого напрямку провідності тиристорних мостів ТМ1 або ТМ2, датчики ДТ і ДН струму і напруги в колі навантаження перетворювача, привідний електродвигун 2 постійного струму з обмоткою ОВ незалежного збудження, автоматичний вимикач 3 в колі навантаження електродвигуна 2, систему 4 автоматичного регулювання, що складається з пропорційно-інтегральних ПІ-регуляторів струму PC і швидкості (ЕРС) РШ, задатчиків інтенсивності швидкості ЗІШ та струму ЗІС, датчика ЕРС (швидкості) електродвигуна 2, вимірювача 5 рівня силової напруги, вузла 6 виділення модуля позитивної полярності значення ЕРС (швидкості), вузла 7 порівняння величини ЕРС (швидкості) і напруги живлення, 1 UA 92068 U 5 10 порогових пристроїв 8, 9 глибини зниження або просідання напруги живлення і глибини неузгодженості співвідношення ЕРС (швидкості) і напруги живильної мережі відповідно, нелінійні лінії затримки 10 і 11 для вимірювання тривалості пониження напруги живлення, логічні елементи І 12, 13, нелінійний формувач 14 експоненціального зменшення кутів керування в системі СІФУ при відновленні рівня напруги живлення, ключі 15 і 16 відключення кола задання швидкості від входу ЗІШ системи автоматичного регулювання та підключення до нього як задання значення фактичної швидкості з виходу датчика ЕРС. У разі незначного зниження напруги живлення тиристорного електроприводу при його роботі в випрямному режимі в колі його навантаження буде зменшуватися струм. ПІ-регулятор струму PC системи 4 для підтримки заданої швидкості почне зменшувати кути управління тиристорного перетворювача 1, збільшуючи величину випрямленої напруги відповідно з відомим виразом: UdB Ud0 cos 15 20 25 30 35 40 де Ud0 - випрямлена напруга навантаженого випрямляча при 0 При більш глибокому зниженні напруги живлення зменшення кута керування увійде в зону його обмеження min . В результаті збільшення випрямленої напруги Ud не відбудеться, що може призвести до зниження швидкості (ЕРС) навантаженого електродвигуна 2 до нуля. Якщо в цей момент напруга живлення, зазвичай стрибком, відновить своє номінальне значення, то в навантаженні почне протікати струм з великою швидкістю його наростання, не обмеженою настройкою ЗІС і регулятора струму. Величина цього струму може досягати уставок спрацьовування захисного апарата - автоматичного вимикача 3, а швидкість наростання при невеликих значеннях індуктивного опору в якорі електродвигуна 2 не виключає ймовірності виникнення "кругового вогню" в колекторі електродвигуна 2. У пропонованому способі такі явища повністю виключаються, так як вимірювач 5 рівня мережевої напруги при такому зниженні через пороговий пристрій 8, нелінійну лінію затримки 10, логічний елемент І 12 сформує сигнал на виключення інтегральних складових регуляторів струму і швидкості, відключення кола задання інтенсивності швидкості ЗІС і на підключення замість неї значення фактичної швидкості (ЕРС) з виходу датчика ЕРС (швидкості). При цьому збільшують максимальний темп ЗІС, щоб на виході регулятора швидкості та струму встановилася напруга, близька до нуля. Крім цього, через формувач 14 встановлюють без затримки максимальне значення кутів регулювання max , а коли напруга живлення відновить своє номінальне значення, сигнал з виходу логічного елемента схеми І 12 переводить регулятори струму і швидкості знову в режим ПІ-регулятора, до задатчика ЗІС підключається сигнал задання швидкості і вихід на задану швидкість проводиться автоматично або вручну оператором з колишнім темпом ЗІС. Одночасно з цим на виході формувача 14 відбувається експоненціальне зменшення кутів керування з постійною часу, близькою до постійної інтегрування регулятора струму. Цим досягається плавне наростання струму в навантаженні. Зниження або просідання напруги живлення при роботі тиристорного електроприводу в інверторному (гальмівному) режимі викликає збільшення заданого струму в навантаженні через зменшення випрямленої напруги Інвертора Udи рівного: Udи Ud0 cos , де - запас міцності Інвертора 45 - кут комутації тиристорів випрямного моста - час відновлення замикаючих властивостей тиристора. При цьому величина інверторного струму визначається виразом: IdИ 50 Ed UdИ R де - Ed ce n - ЕРС електродвигуна. Регулятор струму системи 4 для підтримки заданого струму гальмування збільшує значення напруги інвертора Ud і за допомогою збільшення кута керування . При значному зниженні напруги живлення кут керування досягає граничних значень max min , але через збільшення кута комутації у, що визначається виразом Id XT , arc cos 2 UЛ sin m 2 UA 92068 U 5 10 15 20 25 30 порушується комутація тиристорів в випрямному мосту і, як наслідок, відбувається аварійне відключення вимикача 3 під великим струмом. У запропонованому способі при значному зниженні або просіданні напруги живлення (до 50 % номінального значення), вимірюваної у вузлі 5, і ЕРС двигуна, що обчислюється в модулі 6, формують сигнал в пороговому елементі 9 після порівняння цих величин в вузлі 7 порівняння величини еРС (швидкості) і напруги живлення і після неприпустимого їх співвідношення, через логічний елемент І 12, формувач 14, кут керування а без затримки встановлюється в область обмеження αmах. Крім того, одночасно (так само, як і в випрямному режимі) змінюється структура регуляторів системи 4. У результаті вжитих заходів зменшується струм гальмування, не відбувається накопичення надмірної напруги на виході регуляторів і зберігається стійка комутація тиристорів в інверторному режимі. Після відновлення рівня напруги живлення на виході логічного елемента 12 з'являється сигнал на відновлення структури системи 4 і експоненціального зменшення кута керування через формувач 14. При цьому вихід на задану швидкість визначається оператором або автоматично (так само як і в випрямному режимі роботи). У разі більшого значення ЕРС (швидкості) двигуна або більш глибокого і тривалого просідання напруги живлення в інверторному режимі за наявності логічних сигналів «1» з виходу елементів 11, 9 і 17 на виході логічного елемента І 16 формується сигнал на відключення автоматичного вимикача 3 в колі навантаження до появи в ній аварійного струму, що викликається порушенням комутації тиристорів (явище "прориву інвертора » або двофазного перекидання інвертора). Таким чином, запропонований спосіб підвищує стійкість роботи тиристорного електродвигуна постійного струму при аномальних явищах напруги живильної (силової) мережі, як в випрямному, так і в інверторному режимах роботи і забезпечує працездатність: а) у випрямному режимі роботи при зниженні мережевої напруги або її просіданні до 100 % лінійної напруги; б) в інверторному режимі при зниженні напруги або її просіданні до 50 % лінійної напруги і при величині ЕРС електродвигуна не вище 50 % номінального значення. Джерела інформації: 1. Авторське свідоцтво СРСР № 915166, кл.Н02 Н7/10, Н02 МІ/18, 1982 р. 2. Авторське свідоцтво СРСР № 1264287, кл.Н02 Р5/06, 1984 р. (прототип). ФОРМУЛА КОРИСНОЇ МОДЕЛІ 35 40 45 50 Спосіб керування роботою тиристорного електроприводу постійного струму при аномальних явищах в напрузі живильної мережі, що включає визначення режиму роботи електродвигуна (випрямний або інверторний), вимірювання величини напруги живильної мережі і значення ЕРС (швидкості) електродвигуна, порівняння вимірюваних величин і формування сигналу в систему автоматичного керування приводом при наближенні співвідношення вимірюваних величин до небезпечної межі, який відрізняється тим, що при наближенні співвідношення вимірюваних величин (напруги живильної мережі і ЕРС електродвигуна) до небезпечної межі, змінюють структуру системи автоматичного регулювання швидкості привідного електродвигуна, а саме: шунтують інтегральну складову регуляторів струму і швидкості, відключають коло задання швидкості від входу вузла задання інтенсивності швидкості ЗІШ і переводять його в режим стеження з максимальним темпом по фактичній швидкості (ЕРС) привідного електродвигуна, при цьому кути керування в системі імпульсно-фазового керування СІФУ встановлюють без затримки в зону обмеження максимальних значень, а після відновлення рівня напруги живлення регулятори струму і швидкості в обох режимах (випрямному і інверторному) знову переводять в режим ПІ-регулятора, відновлюють схему кола задання швидкості до задатчика інтенсивності швидкості ЗІШ і зменшують кути керування в системі СІФУ експоненціально з постійною часу, еквівалентною постійній часу регулятора струму, а при більшому значенні швидкості (ЕРС) електродвигуна і при більш глибокому зниженні напруги живлення або при її просіданні в інверторному режимі роботи електродвигуна відключають автоматичний вимикач в колі навантаження до появи в ньому аварійного струму. 3 UA 92068 U Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюZhyhalo Volodymyr Oleksandrovych, Dovzhenko Volodymyr Porfyrovych, Vakulchyk Volodymyr Hryhorovych
Автори російськоюЖигало Владимир Александрович, Довженко Владимир Порфирьевич, Вакульчик Владимир Григорьевич
МПК / Мітки
Мітки: роботою, електроприводу, спосіб, струму, керування, напрузі, явищах, постійного, тиристорного, мережі, живильної, аномальних
Код посилання
<a href="https://ua.patents.su/6-92068-sposib-keruvannya-robotoyu-tiristornogo-elektroprivodu-postijjnogo-strumu-pri-anomalnikh-yavishhakh-v-napruzi-zhivilno-merezhi.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування роботою тиристорного електроприводу постійного струму при аномальних явищах в напрузі живильної мережі</a>
Пристрій керування низьковольтним електродвигуном постійного струму середньої потужності
Номер патенту: 84349
Опубліковано: 10.10.2008
Автор: Семігін Яків Львович
МПК: H02K 15/00
Мітки: низьковольтним, середньої, пристрій, електродвигуном, потужності, керування, струму, постійного
Формула / Реферат:
Пристрій керування низьковольтним електродвигуном постійного струму середньої потужності, що містить перетворювач частоти в напругу та електродвигун, який відрізняється тим, що додатково містить блок живлення, блок керування, блок автоматичного гальмування та імпульсний датчик частоти обертання електродвигуна, при цьому вихід блока живлення сполучений з першим входом блока керування, перший вихід якого сполучений з входом блока автоматичного...
Пристрій регулювання тягового електроприводу постійного струму

Номер патенту: 16046
Опубліковано: 17.07.2006
Автор: Кердівара Анатолій Дмитрович
МПК: B60L 9/00, H02P 1/00, H02P 3/06
Мітки: електроприводу, пристрій, тягового, постійного, струму, регулювання
Формула / Реферат:
Пристрій регулювання тягового електроприводу постійного струму, що містить тяговий електродвигун, якірна обмотка та обмотка збудження якого підключені до контактної мережі за допомогою фільтра та перетворювача напруги, що являє собою електричний міст, утворений двома паралельними ланцюгами, що складаються із транзисторів і діодів, гальмовий резистор, з'єднаний із транзистором, шунтованим зворотним діодом, який відрізняється тим, що у суміжні...
Пристрій для керування низьковольтним електродвигуном постійного струму середньої потужності

Номер патенту: 25731
Опубліковано: 27.08.2007
Автор: Семігін Яків Львович
МПК: H02K 15/00
Мітки: керування, постійного, низьковольтним, електродвигуном, пристрій, струму, середньої, потужності
Формула / Реферат:
Пристрій для керування низьковольтним електродвигуном постійного струму середньої потужності, що містить перетворювач частоти в напругу та електродвигун, який відрізняється тим, що він додатково містить блок живлення, блок керування, блок автоматичного гальмування та імпульсний датчик частоти обертання електродвигуна, при цьому вихід блока живлення сполучений з першим входом блока керування, перший вихід якого сполучений з входом блока...
Система керування багатодвигунним електроприводом постійного струму нахилу конвертора

Номер патенту: 71589
Опубліковано: 25.07.2012
Автори: Куленцов Віктор Олександрович, Ширяєв Іван Миколайович
МПК: H02P 6/00
Мітки: постійного, керування, система, струму, нахилу, конвертора, багатодвигунним, електроприводом
Формула / Реферат:
Система керування багатодвигунним електроприводом нахилу конвертера, яка містить встановлені на навісних редукторах електродвигуни постійного струму з живленням від індивідуальних перетворювачів, що містять регулятори струму кожного електродвигуна та регулятор швидкості принаймні одного електродвигуна, яка відрізняється тим, що у кожний перетворювач введено індивідуальний регулятор швидкості кожного електродвигуна, а систему керування...
Лабораторний стенд для дослідження електроприводу постійного струму з реверсивним широтно-імпульсним перетворювачем
Номер патенту: 59894
Опубліковано: 10.06.2011
Автори: Мельников Вячеслав Олександрович, Бірюков Олександр Олександрович, Курапов Андрій Володимирович, Калінов Андрій Петрович
МПК: H02M 7/21, G09B 23/18
Мітки: широтно-імпульсним, дослідження, постійного, стенд, струму, лабораторний, перетворювачем, реверсивним, електроприводу
Формула / Реферат:
Лабораторний стенд для дослідження електроприводу постійного струму з реверсивним широтно-імпульсним перетворювачем, що включає силовий транзисторний міст, вхідний випрямляч, ємність кола постійного струму, систему керування, який відрізняється тим, що для регулювання напруги якоря транзистори силового моста працюють в режимі широтно-імпульсної модуляції, живлення широтно-імпульсного перетворювача здійснюється безпечним рівнем напруги через...
Попередній патент: Спосіб визначення впливу екзометаболітів культурних рослин на ріст і розвиток культур грибів некротрофного типу живлення
Наступний патент: Пристрій для арифметичного та алгебраїчного порівняння двох чисел класу лишків
Випадковий патент: Фармацевтичний препарат, що містить селеніт або селенітвмісні сполуки, для лікування дисплазій або карцином шийки матки