Система керування багатодвигунним електроприводом постійного струму нахилу конвертора
Номер патенту: 71589
Опубліковано: 25.07.2012
Автори: Куленцов Віктор Олександрович, Ширяєв Іван Миколайович


Формула / Реферат
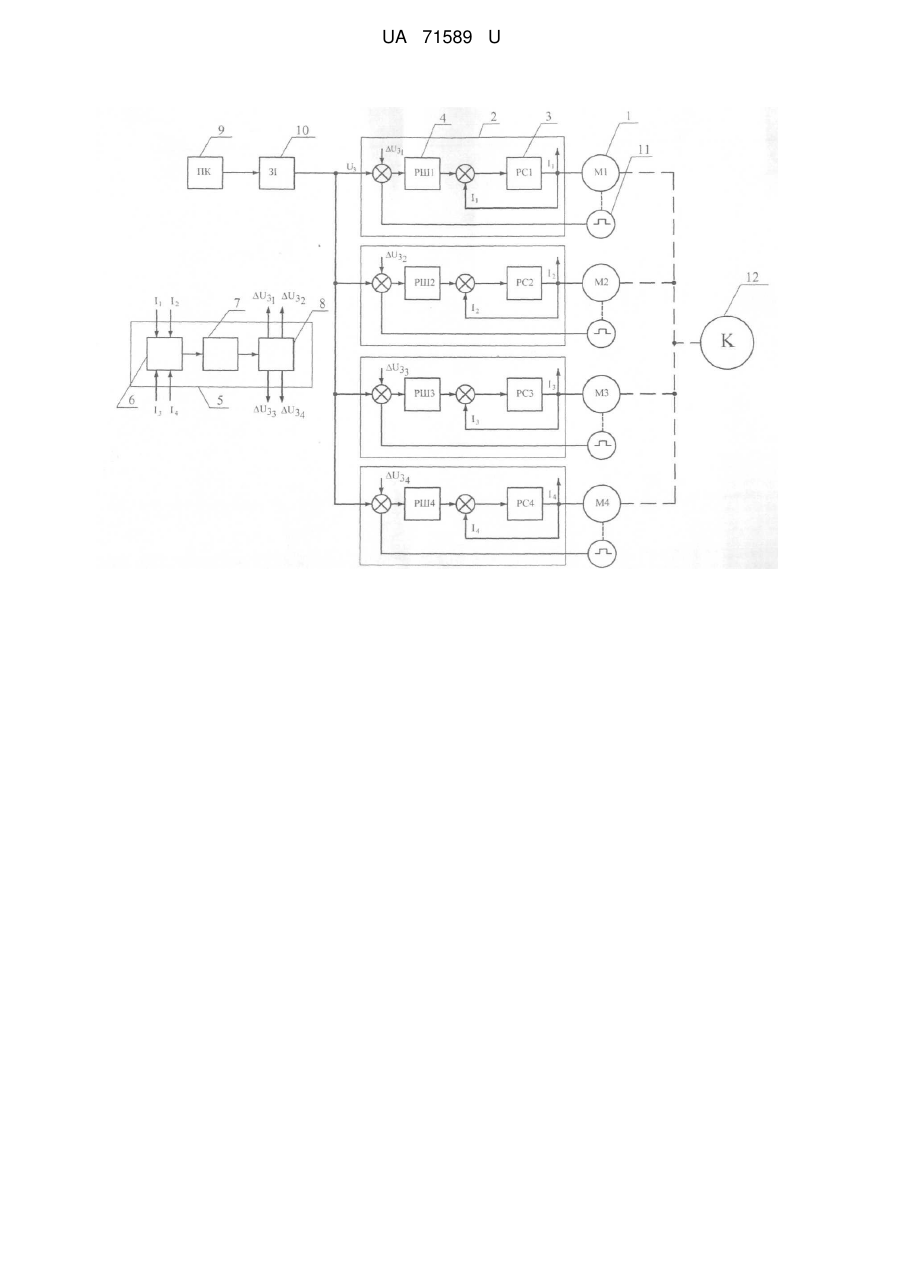
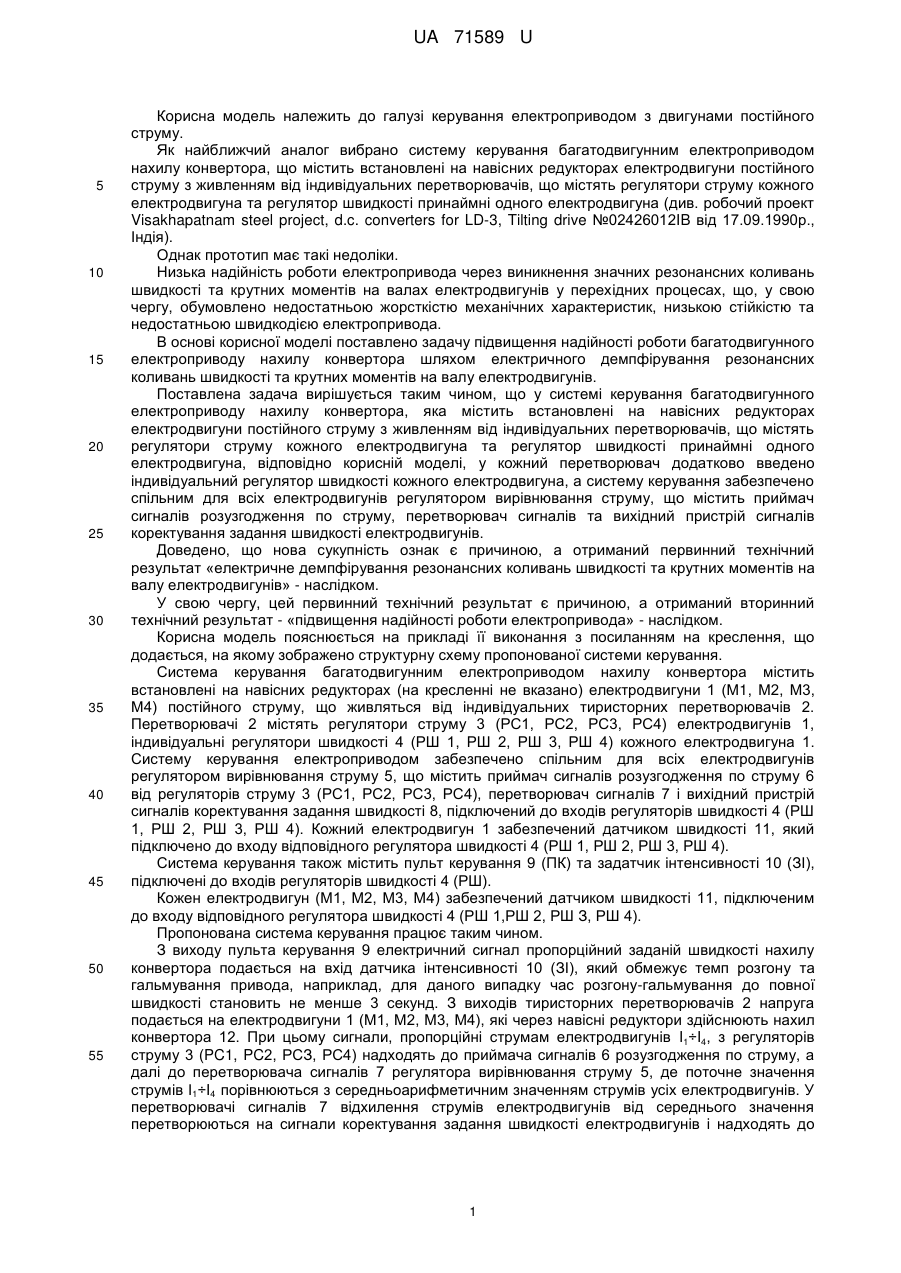
Система керування багатодвигунним електроприводом нахилу конвертера, яка містить встановлені на навісних редукторах електродвигуни постійного струму з живленням від індивідуальних перетворювачів, що містять регулятори струму кожного електродвигуна та регулятор швидкості принаймні одного електродвигуна, яка відрізняється тим, що у кожний перетворювач введено індивідуальний регулятор швидкості кожного електродвигуна, а систему керування забезпечено спільним для всіх електродвигунів регулятором вирівнювання струму, що містить приймач сигналів розузгодження по струму, перетворювач сигналів та вихідний пристрій коректування задання швидкості електродвигунів.
Текст
Реферат: Система керування багатодвигунним електроприводом нахилу конвертора містить навісні редуктори, електродвигуни постійного струму, перетворювачі, регулятори струму електродвигуна, регулятор швидкості електродвигуна, індивідуальні регулятори швидкості кожного електродвигуна, регулятор вирівнювання струму. UA 71589 U (12) UA 71589 U UA 71589 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі керування електроприводом з двигунами постійного струму. Як найближчий аналог вибрано систему керування багатодвигунним електроприводом нахилу конвертора, що містить встановлені на навісних редукторах електродвигуни постійного струму з живленням від індивідуальних перетворювачів, що містять регулятори струму кожного електродвигуна та регулятор швидкості принаймні одного електродвигуна (див. робочий проект Visakhapatnam steel project, d.c. converters for LD-3, Tilting drive №02426012IB від 17.09.1990р., Індія). Однак прототип має такі недоліки. Низька надійність роботи електропривода через виникнення значних резонансних коливань швидкості та крутних моментів на валах електродвигунів у перехідних процесах, що, у свою чергу, обумовлено недостатньою жорсткістю механічних характеристик, низькою стійкістю та недостатньою швидкодією електропривода. В основі корисної моделі поставлено задачу підвищення надійності роботи багатодвигунного електроприводу нахилу конвертора шляхом електричного демпфірування резонансних коливань швидкості та крутних моментів на валу електродвигунів. Поставлена задача вирішується таким чином, що у системі керування багатодвигунного електроприводу нахилу конвертора, яка містить встановлені на навісних редукторах електродвигуни постійного струму з живленням від індивідуальних перетворювачів, що містять регулятори струму кожного електродвигуна та регулятор швидкості принаймні одного електродвигуна, відповідно корисній моделі, у кожний перетворювач додатково введено індивідуальний регулятор швидкості кожного електродвигуна, а систему керування забезпечено спільним для всіх електродвигунів регулятором вирівнювання струму, що містить приймач сигналів розузгодження по струму, перетворювач сигналів та вихідний пристрій сигналів коректування задання швидкості електродвигунів. Доведено, що нова сукупність ознак є причиною, а отриманий первинний технічний результат «електричне демпфірування резонансних коливань швидкості та крутних моментів на валу електродвигунів» - наслідком. У свою чергу, цей первинний технічний результат є причиною, а отриманий вторинний технічний результат - «підвищення надійності роботи електропривода» - наслідком. Корисна модель пояснюється на прикладі її виконання з посиланням на креслення, що додається, на якому зображено структурну схему пропонованої системи керування. Система керування багатодвигунним електроприводом нахилу конвертора містить встановлені на навісних редукторах (на кресленні не вказано) електродвигуни 1 (М1, М2, М3, М4) постійного струму, що живляться від індивідуальних тиристорних перетворювачів 2. Перетворювачі 2 містять регулятори струму 3 (РС1, РС2, РС3, РС4) електродвигунів 1, індивідуальні регулятори швидкості 4 (РШ 1, РШ 2, РШ 3, РШ 4) кожного електродвигуна 1. Систему керування електроприводом забезпечено спільним для всіх електродвигунів регулятором вирівнювання струму 5, що містить приймач сигналів розузгодження по струму 6 від регуляторів струму 3 (РС1, РС2, РС3, РС4), перетворювач сигналів 7 і вихідний пристрій сигналів коректування задання швидкості 8, підключений до входів регуляторів швидкості 4 (РШ 1, РШ 2, РШ 3, РШ 4). Кожний електродвигун 1 забезпечений датчиком швидкості 11, який підключено до входу відповідного регулятора швидкості 4 (РШ 1, РШ 2, РШ 3, РШ 4). Система керування також містить пульт керування 9 (ПК) та задатчик інтенсивності 10 (ЗІ), підключені до входів регуляторів швидкості 4 (РШ). Кожен електродвигун (М1, М2, М3, М4) забезпечений датчиком швидкості 11, підключеним до входу відповідного регулятора швидкості 4 (РШ 1,РШ 2, РШ З, РШ 4). Пропонована система керування працює таким чином. З виходу пульта керування 9 електричний сигнал пропорційний заданій швидкості нахилу конвертора подається на вхід датчика інтенсивності 10 (ЗІ), який обмежує темп розгону та гальмування привода, наприклад, для даного випадку час розгону-гальмування до повної швидкості становить не менше 3 секунд. З виходів тиристорних перетворювачів 2 напруга подається на електродвигуни 1 (М1, М2, М3, М4), які через навісні редуктори здійснюють нахил конвертора 12. При цьому сигнали, пропорційні струмам електродвигунів I1÷I4, з регуляторів струму 3 (PC1, PC2, РСЗ, РС4) надходять до приймача сигналів 6 розузгодження по струму, а далі до перетворювача сигналів 7 регулятора вирівнювання струму 5, де поточне значення струмів І1÷I4 порівнюються з середньоарифметичним значенням струмів усіх електродвигунів. У перетворювачі сигналів 7 відхилення струмів електродвигунів від середнього значення перетворюються на сигнали коректування задання швидкості електродвигунів і надходять до 1 UA 71589 U 5 10 15 20 вихідного пристрою 8, а далі на входи регуляторів швидкості 4 (РШ 1, РШ 2, РШ 3, РШ 4) електродвигунів 1. У разі перевантаження, наприклад, електродвигуна 1 (Ml) сигнали коректування задання швидкості ( Uз2 , Uз3 , Uз4 ), пропорційні різності значення струму (I2 ,I3 ,I4 ) кожного електродвигуна (М2, М3, М4) та середньоарифметичного значення Icp струмів усіх електродвигунів (M1, M2, М3, М4), які передаються від вихідного пристрою 8 до регуляторів швидкості 4 (РШ2, РШ3, РШ4), збільшують вихідну напругу тиристорних перетворювачів 2 електродвигунів (М2, М3, М4), а, отже, швидкість і струм електродвигунів (М2, М3, М4). Останні приймають на себе додаткову частину струмового навантаження, розвантажуючи електродвигун 1 (МІ). Таким чином, у пропонованій системі керування електроприводом нахилу конвертора для кожного електродвигуна 1 реалізовано двоконтурну систему підлеглого регулювання параметрів, а саме: 1-й контур регулятором струму PC здійснюється зворотний зв'язок за струмом. 2-й - регулятором швидкості РШ здійснюється зворотний зв'язок за швидкістю. Наявність у системі глибокого зворотного зв'язку за швидкістю кожного електродвигуна дозволяє здійснити електричне демпфірування резонансних коливань швидкості та крутних моментів електродвигунів, що підвищує надійність роботи, оскільки суттєво знижуються динамічні навантаження на механічну частину приводу, підвищується жорсткість механічних характеристик та швидкодійність електроприводу. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 30 Система керування багатодвигунним електроприводом нахилу конвертора, яка містить встановлені на навісних редукторах електродвигуни постійного струму з живленням від індивідуальних перетворювачів, що містять регулятори струму кожного електродвигуна та регулятор швидкості принаймні одного електродвигуна, яка відрізняється тим, що у кожний перетворювач введено індивідуальний регулятор швидкості кожного електродвигуна, а систему керування забезпечено спільним для всіх електродвигунів регулятором вирівнювання струму, що містить приймач сигналів розузгодження по струму, перетворювач сигналів та вихідний пристрій коректування задання швидкості електродвигунів. 2 UA 71589 U Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for control of multi-motor electric drive of converter tilt
Автори англійськоюKulentsov Viktor Oleksandrovych, Shyriaiev Ivan Mykolaiovych
Назва патенту російськоюСистема управления многодвигательным электроприводом постоянного тока наклона конвертора
Автори російськоюКуленцов Виктор Александрович, Ширяев Иван Николаевич
МПК / Мітки
МПК: H02P 6/00
Мітки: електроприводом, система, постійного, керування, конвертора, нахилу, багатодвигунним, струму
Код посилання
<a href="https://ua.patents.su/5-71589-sistema-keruvannya-bagatodvigunnim-elektroprivodom-postijjnogo-strumu-nakhilu-konvertora.html" target="_blank" rel="follow" title="База патентів України">Система керування багатодвигунним електроприводом постійного струму нахилу конвертора</a>
Спосіб цифрового керування електроприводом постійного струму головних електроприводів прокатних станів
Номер патенту: 32089
Опубліковано: 12.05.2008
Автори: Файнштейн Вілен Григорович, Цвітнов Віталій Олександрович
МПК: H02P 5/00
Мітки: струму, цифрового, станів, керування, електроприводів, головних, постійного, прокатних, спосіб, електроприводом
Формула / Реферат:
Спосіб цифрового керування електроприводом постійного струму головних електроприводів прокатних станів, що містить обчислювальний пристрій, що забезпечує регулювання струму й швидкості обертання якоря двигуна шляхом обчислення затримки включення чергового тиристора відносно початку наступного інтервалу перетворення, цифровий пристрій керування уведенням (виводом) інформації в (з) обчислювального пристрою, який відрізняється тим, що визначення...
Система керування тяговим електроприводом змінного струму рудникових електровозів
Номер патенту: 20092
Опубліковано: 15.01.2007
Автори: Сінчук Олег Миколайович, Сінчук Ігор Олегович, Гузов Едуард Семенович, Лебьодкін Сергій Вікторович, Караманиць Федір Іванович, Зайцев Ігор Миколайович
МПК: H02M 5/00
Мітки: рудникових, електровозів, система, струму, керування, тяговим, електроприводом, змінного
Формула / Реферат:
Система керування тяговим електроприводом змінного струму рудникових електровозів, що містить пульт керування машиніста, з'єднувальні проводи, блок захисту і контролю роботи електроустаткування, два тягові асинхронні двигуни, яка відрізняється тим, що система керування забезпечена багаторівневим інвертором напруг з автономним джерелом живлення, при цьому багаторівневий інвертор включає електрично зв'язані з пультом керування два інверторні...
Спосіб дистанційної діагностики стану механічної частини стрілочного переводу з електроприводом постійного струму
Номер патенту: 8573
Опубліковано: 15.08.2005
Автори: Руденко Олександр Борисович, Парфьонов Володимир Іванович
МПК: B61L 7/00
Мітки: струму, дистанційно, механічної, частини, діагностики, стрілочного, спосіб, електроприводом, постійного, стану, переводу
Формула / Реферат:
Спосіб дистанційної діагностики стану механічної частини стрілочного переводу з електроприводом постійного струму, при якому виділяють, осцилографують і аналізують криву складову споживаного струму, який відрізняється тим, що проводять миттєвий аналіз кривої струму, наприклад за допомогою швидкого розкладання в ряд Фур'є, і при появі в спектрі гармонік в діапазоні 1 - 10000 Гц за їх частотою і амплітудою та параметрами швидкісної частоти...
Система керування електроприводом

Номер патенту: 63452
Опубліковано: 10.10.2011
Автори: Орел Олексій Віталійович, Плугатар Олексій Петрович, Волков Ігор Володимирович, Войтех Володимир Олександрович
МПК: B66B 1/00
Мітки: система, електроприводом, керування
Формула / Реферат:
Система керування електроприводом, що містить перетворювач електроенергії, який своїм силовим входом з'єднаний з мережею живлення, а силовим виходом з'єднаний з обмотками двигуна, яка відрізняється тим, що вона додатково містить GSM-модуль, антену, та мікроконтролер, який своїми функціональними виходами з'єднаний з керуючими входами перетворювача електроенергії, вхід мікроконтролера з'єднаний з виходом GSM-модуля, а вхід GSM-модуля з'єднаний...
Електропривід постійного струму з модулем штучного інтелекту
Номер патенту: 33719
Опубліковано: 10.07.2008
Автор: Броварець Олександр Олександрович
МПК: H02P 1/00
Мітки: інтелекту, модулем, струму, штучного, електропривід, постійного
Формула / Реферат:
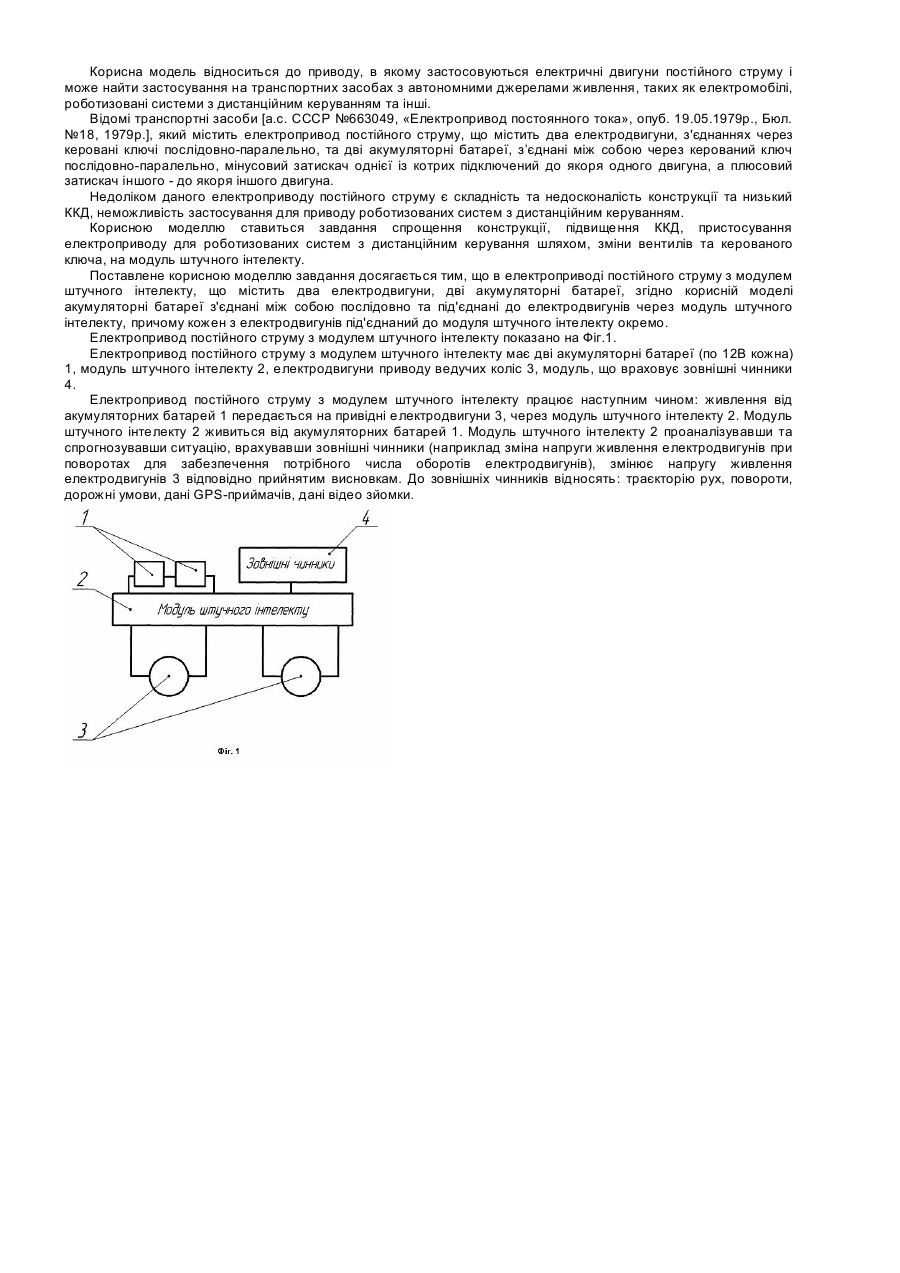
Електропривід постійного струму з модулем штучного інтелекту, що містить два електродвигуни, дві акумуляторні батареї, який відрізняється тим, що акумуляторні батареї з'єднані між собою послідовно та під'єднані до електродвигунів через модуль штучного інтелекту, причому кожен з електродвигунів під'єднаний до модуля штучного інтелекту окремо.
Попередній патент: Спосіб дезінфекції лабораторного та іншого обладнання для ветеринарної медицини
Наступний патент: Конденсаційний гігрометр
Випадковий патент: Спосіб приготування носія для каталізаторів наносного типу