Автономний пристрій для переміщення екскаваторів
Номер патенту: 92254
Опубліковано: 11.10.2010
Автори: Вайнер Руслан Юхимович, Нечай Андрій Михайлович, Гнідаш Богдан Леонідович, Малишев Валерій Васильович
Формула / Реферат
1. Пристрій для переміщення екскаватора, де екскаватор містить двигуни ходу з їх обмотками збудження, а пристрій містить енергопостачальний пристрій, який установлений на платформі та має електричний зв'язок з електричним устаткуванням екскаватора, який відрізняється тим, що енергопостачальний пристрій містить пульт керування, зв'язаний з системою керування енергопостачальним пристроєм, де остання електрично зв'язана з якірними перетворювачами двигунів ходу екскаватора і пристроями динамічного гальмування двигунів ходу, а також з перетворювачами живлення обмоток збудження двигунів ходу і джерелом живлення гальмових пристроїв гусениць, та основний генератор з системою збудження і системою стабілізації його вихідної напруги, акумулятор, допоміжний генератор, що електрично зв'язаний з акумулятором і виконаний з можливістю його зарядки, силовий привод із системою керування силовим приводом, системою запуску і системою стабілізації обертів, механічно зв'язаний з основним і допоміжним генератором, пристрій захисту від міжфазних ушкоджень, електрично зв'язаний із основним генератором та виконаний з можливістю живлення електричним струмом згаданих якірних перетворювачів двигунів ходу, пристроїв динамічного гальмування двигунів ходу, а також перетворювачів живлення обмоток збудження двигунів ходу та джерела живлення гальмових пристроїв гусениць.
2. Пристрій для переміщення екскаваторів за п. 1, який відрізняється тим, що основний генератор електрично зв'язаний із джерелом живлення системи змащення екскаватора.
3. Пристрій для переміщення екскаваторів за п. 1, який відрізняється тим, що основний генератор електрично зв'язаний із джерелом живлення гідравлічної системи екскаватора.
Текст
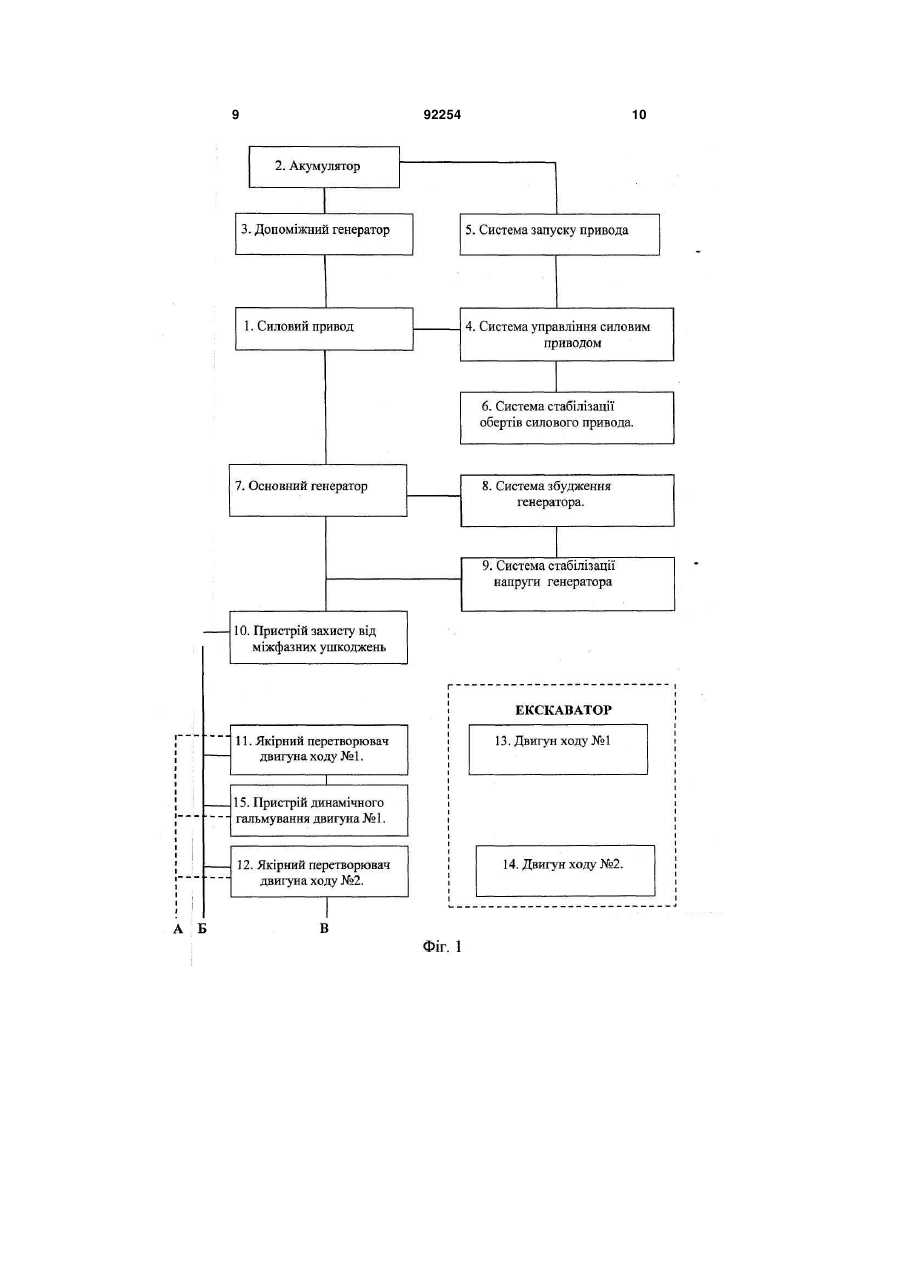
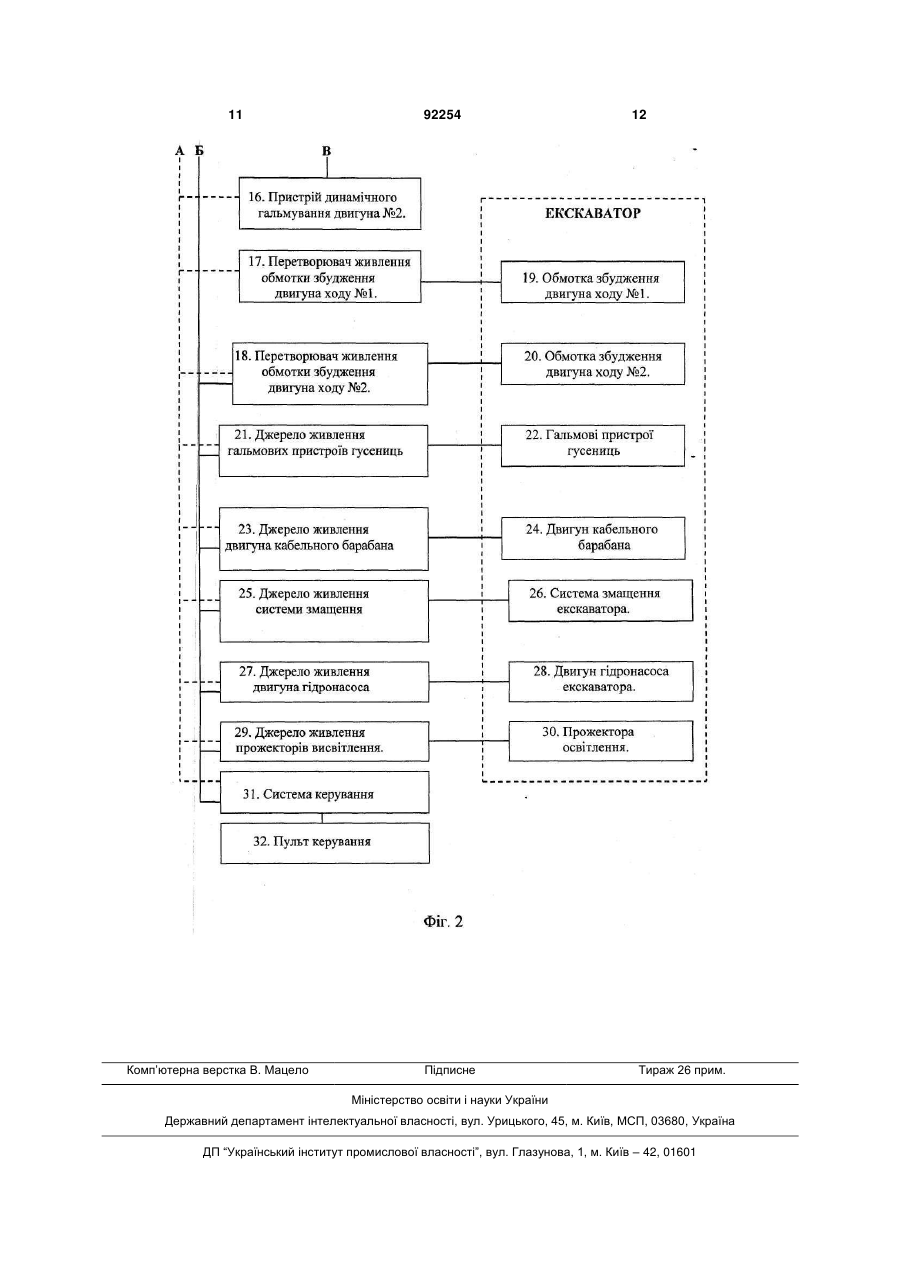
1. Пристрій для переміщення екскаватора, де екскаватор містить двигуни ходу з їх обмотками збудження, а пристрій містить енергопостачальний пристрій, який установлений на платформі та має електричний зв'язок з електричним устаткуванням екскаватора, який відрізняється тим, що енергопостачальний пристрій містить пульт керування, зв'язаний з системою керування енергопостачальним пристроєм, де остання електрично зв'язана з C2 2 (19) 1 3 собою високовольтний вимикач, який забезпечує з'єднання чи роз'єднання ланцюга між живильною магістральною мережею і споживачем екскаватором. У зв'язку з тим, що живлячою напругою мережі екскаватора є перемінний струм напругою 6000 В, живлення екскаватора забезпечується прямо безпосередньо з живильної мережі. Виходячи з цього, при роботі екскаватора кабель від струмознімальних кілець екскаватора підключають до платформи. Електричне живлення забезпечується прямим включенням у магістральну мережу провідників, розташованим у кошику платформи (перемикаючого пункту). Провідники підключені до ввідних контактів високовольтного вимикача, а вивідні контакти з'єднані з живильним кабелем екскаватора. Переміщення екскаватора при переміщенні і при безпосередній роботі здійснюється на довжину кабелю. Якщо переміщення екскаватора здійснюється на відстань більше ніж довжина кабелю, то необхідний цілий цикл робіт, зв'язаних з переміщенням екскаватора. У цей цикл входять роботи, які виконують у наступній послідовності: роз'єднання електричного ланцюга між екскаватором і магістральною мережею, відключення електричного кабелю від високовольтного вимикача платформи, відключення провідників у кошику платформи від магістральної мережі, переміщення платформи по ходу руху екскаватора і включення провідників у її кошику до магістральної мережі, включення живильного кабелю до вивідних контактів високовольтного вимикача в платформі, включення контактів високовольтного вимикача і подача живильного струму виконавчим пристроям екскаватора. Переміщення екскаватора зв'язане з необхідністю переміщення платформи, тим самим викликає значні трудові і матеріальні витрати. При переміщенні з вибою в зону ремонту і назад необхідно будівництво тимчасової високовольтної лінії від вибою до зони ремонту. Усе це негативно відбивається на технікоекономічних показниках гірських робіт і, відповідно, на собівартості видобутку корисних копалин при відпрацьовуванні родовища. Задачею винаходу є удосконалення конструкції пристрою для переміщення екскаваторів за рахунок виконання платформи мобільною і постаченою енергоподавальним пристроєм, який забезпечує генерацію електричної енергії, що забезпечує можливість переміщення екскаватора без підключення до магістрального високовольтного електричного ланцюга. Реалізація винаходу дозволяє знизити трудові і матеріальні витрати на переключення екскаватора і зв'язані з цим простої технологічного устаткування. При використанні пристрою запобігаються простої устаткування, тому що при переключенні екскаватора необхідно відключення магістрального електричного ланцюга кар'єру, до якого, як правило, підключено декілька споживачів. Поставлена задача вирішується за рахунок того, що пристрій для переміщення екскаваторів включає енергоподавальний пристрій, установлений на пересувній платформі і виконаний з можли 92254 4 вістю електричного зв'язку з електричним устаткуванням екскаватора. Відповідно до винаходу, пристрій включає якірні перетворювачі двигунів ходу, пристрою динамічного гальмування двигунів, пульт управління, систему управління, перетворювачі живлення обмоток збудження двигунів ходу, пристрій захисту від міжфазних ушкоджень, генератор із системою збудження і системою стабілізації його напруги, а також силовий привод із системою управління, системою запуску і системою стабілізації обертів, допоміжний генератор, акумулятор, джерело живлення гальмових пристроїв гусениць, при цьому силовий привод, постачений системами управління, запуску і стабілізації обертів, механічно зв'язаний з основним і допоміжним генератором, причому допоміжний генератор електрично зв'язаний з акумулятором і виконаний з можливістю його заряджання, а основний генератор постачений системою збудження і системою стабілізації вихідної напруги, при цьому основний генератор електрично зв'язаний із пристроєм захисту від міжфазних ушкоджень, за допомогою якого здійснюється живлення електричним струмом якірних перетворювачів двигунів ходу з пристроями їхнього динамічного гальмування, а також перетворювачів живлення обмоток збудження двигунів ходу, джерела живлення гальмових пристроїв гусениць, причому пристрій постачений пультом управління, що зв'язаний із системою управління пристроєм, електрично зв'язаною з якірними перетворювачами двигунів ходу і пристроями їхнього динамічного гальмування, а також перетворювачами живлення обмоток збудження двигунів ходу і джерелом живлення гальмових пристроїв гусениць. Для безперебійного змащення вузлів ходової частини і підшипників ковзання екскаватора, основний генератор за допомогою пристрою захисту від міжфазних ушкоджень електрично зв'язаний із джерелом живлення системи змащення екскаватора. Для забезпечення безупинної роботи систем управління і допоміжних систем екскаватора при його русі, основний генератор за допомогою пристрою захисту від міжфазних ушкоджень електрично зв'язаний з джерелом живлення гідравлічної системи екскаватора. Для запобігання ушкодження штатного високовольтного кабелю при переміщенні екскаватора, основний генератор за допомогою пристрою захисту від міжфазнх ушкоджень електрично зв'язаний із джерелом живлення кабельного барабана. Підвищення безпечних умов експлуатації екскаватора при його переміщенні досягається включенням в електричний ланцюг основного генератора - джерела живлення прожекторів освітлення. Заявлений винахід ілюструється фігурами № 1 - 2, на яких зображена блок-схема автономного пристрою для переміщення екскаваторів. На автомобільному чи тракторному причепі, з'єднаному з екскаватором, установлений контейнер, у якому розміщений силовий двигун (привод) 1 (дизельний, бензиновий, газовий і ін.) з паливним баком, акумулятором 2, допоміжним генератором 3, системою управління силовим приводом 5 4, що включає систему запуску привода 5 і систему стабілізації обертів привода 6. Силовий привод 1 з'єднаний валом з основним генератором 7, що має систему збудження 8 і систему 9 стабілізації величини вихідної напруги генератора, яка через пристрій захисту від міжфазних ушкоджень 10 подається на два керованих напівпровідникових реверсивних якірних перетворювача 11 і 12, до виходів яких підключені якірні ланцюги двигунів руху 13 і 14 екскаватора і пристрою динамічного гальмування 15 і 16 двигунів руху 13 і 14 . До виходу пристрою захисту 10 основного генератора 7 від міжфазних ушкоджень також підключені: - перетворювачі 17 і 18 живлення обмоток збудження 19 і 20 першого і другого двигунів руху 13 і 14; - джерело живлення 21 гальмових пристроїв 22 гусениць екскаватора; - джерело живлення 23 двигуна кабельного барабана 24 застосовуваного, наприклад, на екскаваторах типу ЭКГ-10; - джерело живлення 25 системи змащення 26 застосовуваної, наприклад, на екскаваторах типу ЭКГ-10; - джерело живлення 27 двигуна гідронасоса 28 застосовуваного, наприклад, на екскаваторах типу ЭКГ-5А; - джерело живлення 29 прожекторів освітлення 30; Функціонує пристрій при перегоні екскаватора за допомогою системи управління 31, що зв'язана з пультом управління 32. Система управління 31 забезпечує: - регулювання швидкості обертання двигунів 13 і 14 руху екскаватора і формування екскаваторної характеристики зі своїми параметрами для кожного типу екскаватора шляхом впливу на керовані напівпровідникові реверсивні якірні перетворювачі 11 і 12; - створення режиму динамічного гальмування двигунів ходу 13 і 14 шляхом впливу на їх пристрої динамічного гальмування 15 і 16 при русі екскаватора під ухил; - управління обмотками збудження 19 і 20 двигунів ходу, у тому числі реверс збудження, шляхом впливу на перетворювачі 17 і 18; - управління пристроями гальм 22 гусениць екскаватора. Автономний пристрій працює в такий спосіб. Все електромеханічне устаткування, що забезпечує переміщення екскаватора, монтується на платформі, яка постачена ходовою частиною, що дозволяє переміщатися пристрою за екскаватором за допомогою жорсткого зчепа. Функціонально пристрій забезпечує безперебійне постачання електричних двигунів 13, 14 ходової частини екскаватора, а також електричних приводів 24, 26, 28, 30 допоміжних систем, функціонування яких необхідно при переміщенні екскаватора. Основними функціональними вузлами пристрою є силовий привод 1, механічно зв'язаний з основним генератором 7. 92254 6 До початку переміщення екскаватора автономний пристрій доставляється до нього. Платформа, на якій встановлене основне і допоміжне устаткування, приєднується за допомогою зчіпного пристрою до екскаватора. Живильні кабелі автономного пристрою приєднують до клемної коробки екскаватора. Довжину живильних кабелів вибирають виходячи з відстані між автономним пристроєм і екскаватором. Пристрій функціонує за рахунок роботи силового привода 1, що представляє собою, як правило, дизельний двигун, система управління 4 якого за рахунок спільної роботи із системою стабілізації обертів 6 стабілізує роботу цього силового привода 1 і, відповідно, основного генератора 7 перемінного струму, механічно зв'язаного з ним. За допомогою акумулятора 2, який живить стартер, запускається силовий привод 1 і стабілізується його робота. Кількість обертів вихідного вала силової установки 1 повинна відповідати необхідному числу обертів основного генератора 7. При запуску силового привода 1, обертання його вихідного вала передається основному 7 і допоміжному 3 генераторам. Номінальні оберти вихідного вала забезпечують генерацію електричної енергії, напруга і сила струму якої забезпечує нормальне функціонування електричних систем пристрою. Вироблений допоміжним генератором 3 електричний струм служить для зарядки акумулятора 2 і живлення вузлів систем управління 4 силовим приводом 1 у робочому режимі. Запуск привода 1 здійснюється безпосередньо за допомогою системи управління 4 приводом, що зв'язана із системою його запуску 5. Обертання вихідного вала силового привода 1 і параметри електричної енергії, яка вироблюється основним генератором 7, взаємозалежні між собою. Незважаючи на стабілізацію обертів силового привода 1, можуть спостерігатися коливання напруги на виході генератора 7 при зміні режиму роботи двигунів ходу (рух у гору, під ухил, наїзд на перешкоду та інш.). Максимальне і мінімальне значення величини напруги генератора 7 негативно позначається на роботі електричних систем. Для стабілізації напруги в електричний ланцюг пристрою між основним генератором 7 і пристроєм захисту ланцюга від міжфазних ушкоджень 10 включена система стабілізації напруги основного генератора 9, що також зв'язана із системою збудження генератора 8. При зниженні напруги система стабілізації 9 подає команду через систему збудження 8 на збільшення струму збудження генератора 7 і навпаки. Пристрій для захисту від міжфазних ушкоджень 10 забезпечує при роботі основного генератора 7 захист ланцюга від замикання, а також від травмування електричним струмом обслуговуючого персоналу. Крім того, пристрій захисту від міжфазних ушкоджень 10, виконуючи функцію контролю, фактично є вихідною живильною системою для електричного ланцюга автономного пристрою при переміщенні екскаватора. Від пристрою захис 7 ту від міжфазних ушкоджень 10 живильна напруга надходить на основні електричні вузли і системи. Генеруємий струм надходить на якірні перетворювачі 11, 12 двигунів ходу 13, 14 екскаватора. Якірні перетворювачі 11, 12 є живильними пристроями двигунів ходу 13, 14 екскаватора, що забезпечують його рух у заданому напрямку. При необхідності, пристрої динамічного гальмування 15, 16 двигунів ходу 13, 14 дозволяють знизити швидкість руху чи виконати повну зупинку екскаватора не прибігаючи до допомоги механічних гальмових пристроїв. Це особливо важливо при русі екскаватора під ухил. При русі в темний час доби за допомогою джерела живлення 29 включаються прожектори 30, що освітлюють робочу зону в якій рухається екскаватор. Якщо екскаватор має двигун 24 кабельного барабана, то джерело живлення 23 кабельного барабана дозволяє намотати штатний кабель високої напруги на барабан і запобігти його ушкодження при торканні земної поверхні. У залежності від конструкції і типу екскаватора, додатково можуть включатися допоміжні механізми: джерело живлення 25 системи змащення 26, а також джерело живлення 27 двигуна гідронасоса 28. У цілому, робота вузлів і систем автономного пристрою забезпечується за допомогою пульта управління 32, який монтується безпосередньо на платформі, але може бути виконаний і зовнішнім. Пульт управління електрично зв'язаний із системою управління 31 автономним пристроєм, при цьому контролює роботу і функціонування наступних систем: - якірних перетворювачів 11,12 двигунів ходу 13, 14; - пристроїв динамічного гальмування двигунів 15, 16; - перетворювачів живлення 17, 18 обмоток збудження 19, 20 двигунів ходу 13,14; - джерела живлення 21 гальмових пристроїв 22 гусениць; - джерела живлення 23 двигуна кабельного барабана24; - джерела живлення 25 системи змащення 26; - джерела живлення 27 двигуна гідронасоса 28; 92254 8 - джерела живлення 29 прожекторів висвітлення 30. З пульта управління 32 задається напрямок руху екскаватора: уперед,назад, поворот. При повороті одна гусениця обертається вперед, а інша - назад. Змінюючи з пульта 32 завдання якірним перетворювачам 11, 12, регулюють швидкість обертання двигунів ходу 13, 14, тобто швидкість переміщення екскаватора. При русі під гору, якщо швидкість перевищує задану, включається динамічне гальмування: двигуни відключаються від якірних перетворювачів 11, 12, підключаються до опорів динамічного гальмування 15, 16, переходять у генераторний режим, тим самим знижуючи швидкість переміщення екскаватора. При необхідності включаються гальмові пристрої 22 гусениць, з'єднаних із джерелом живлення електричним струмом 21. У залежності від конструктивного виконання екскаваторів підключених до автономного пристрою, його постачають джерелом живлення 27 двигунів гідронасоса 28 чи джерелом живлення 25 системи змащення 26. Ці джерела 25, 27, забезпечуючи живлення двигунів системи змащення 26 і гідронасоса 28, дозволяють виконувати змащення тертьових частин екскаватора при його русі, а також функціонування вузлів екскаватора, робота яких забезпечується гідравлічною системою. Проведені дослідно-промислові іспити пристрою показали його високу функціональність і можливість живлення електричних систем екскаватора для його переміщення на різні відстані, як по рівної, так і по пересіченій місцевості з різним ухилам. Використання пристрою забезпечує оптимальне функціонування всіх необхідних систем екскаватора і може використовуватися як при його внутрішньокар'єрному переміщенні, так і за зоною ведення гірських робіт. Використання пристрою дозволяє підвищити ефективність використання гірського устаткування, тим самим знизити собівартість екскавації гірської маси за рахунок збільшення швидкості переміщення без відключення магістральної електричної мережі і гірського устаткування підключеного до неї. 9 92254 10 11 Комп’ютерна верстка В. Мацело 92254 Підписне 12 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюAutonomous device for excavators travel motion
Автори англійськоюMalyshev Valerii Vasyliovych, Hnidash Bohdan Leonidovych, Nechai Andrii Mykhailovych, Vainer Ruslan Yukhymovych
Назва патенту російськоюАвтономное устройство для перемещения экскаваторов
Автори російськоюМалышев Валерий Васильович, Гнидаш Богдан Леонидович, Нечай Андрей Михайлович, Вайнер Руслан Ефимович
МПК / Мітки
МПК: E02F 9/20, E21F 13/00, B60L 11/00
Мітки: пристрій, автономний, екскаваторів, переміщення
Код посилання
<a href="https://ua.patents.su/6-92254-avtonomnijj-pristrijj-dlya-peremishhennya-ekskavatoriv.html" target="_blank" rel="follow" title="База патентів України">Автономний пристрій для переміщення екскаваторів</a>
Автономний пристрій для переміщення екскаваторів
Номер патенту: 42638
Опубліковано: 10.07.2009
Автори: Вайнер Руслан Юхимович, Гнідаш Богдан Леонідович, Нечай Андрій Михайлович, Малишев Валерій Васильович
МПК: B66B 1/00, B60P 3/00, E21F 13/00
Мітки: переміщення, автономний, пристрій, екскаваторів
Формула / Реферат:
1. Автономний пристрій для переміщення екскаваторів, що включає енергоподавальний пристрій, установлений на платформі і виконаний з можливістю електричного зв'язку з електричним устаткуванням екскаватора, який відрізняється тим, що енергоподавальний пристрій включає якірні перетворювачі двигунів ходу, пристрої динамічного гальмування двигунів, пульт керування, систему керування, перетворювачі живлення обмоток збудження двигунів ходу, пристрій...
Автономний пристрій для переміщення бурових верстатів
Номер патенту: 42642
Опубліковано: 10.07.2009
Автори: Нечай Андрій Михайлович, Малишев Валерій Васильович, Гнідаш Богдан Леонідович, Вайнер Руслан Юхимович
МПК: E21D 9/08, E21B 7/02, E21B 23/00
Мітки: верстатів, бурових, переміщення, автономний, пристрій
Формула / Реферат:
1. Автономний пристрій для переміщення бурових верстатів, що включає енергоподавальний пристрій, установлений на платформі, що виконана з можливістю механічного зв'язку з буровим верстатом, при цьому енергоподавальний пристрій за допомогою кабелю електрично пов'язаний з устаткуванням бурового верстата, який відрізняється тим, що енергоподавальний пристрій має силовий привод, пов'язаний з генератором, при цьому силовий привод містить систему...
Автономний пристрій для переміщення бурових верстатів
Номер патенту: 90415
Опубліковано: 26.04.2010
Автори: Нечай Андрій Михайлович, Вайнер Руслан Юхимович, Гнідаш Богдан Леонідович, Малишев Валерій Васильович
Мітки: переміщення, бурових, пристрій, автономний, верстатів
Формула / Реферат:
1. Автономний пристрій для переміщення бурових верстатів, що містить енергоподавальний пристрій, установлений на платформі, що виконана з можливістю механічного зв'язку з буровим верстатом, при цьому енергоподавальний пристрій за допомогою кабелю електрично пов'язаний з устаткуванням бурового верстата, який відрізняється тим, що енергоподавальний пристрій має силовий привід, пов'язаний з генератором, при цьому силовий привід містить систему...
Автономний пристрій з акустичною системою орієнтування для вивчення великих китоподібних
Номер патенту: 46955
Опубліковано: 17.06.2002
Автори: Шпет Ніна Георгієвна, Попадюха Юрій Андрійович, Козак Владлен Андрійович, Гурчик Ігор Миколайович
МПК: G01S 1/00
Мітки: китоподібних, орієнтування, акустичною, пристрій, системою, великих, вивчення, автономний
Формула / Реферат:
1. Автономний пристрій з акустичною системою орієнтування для вивчення великих китоподібних, який має радіопристрій для пеленгування, апаратуру для вивчення процесів, що пов'язані з зануренням тварин, гідроакустичну антену, гідролокатор та антену для передачі радіосигналу, який відрізняється тим, що використовується гідроакустична система динамічного позиціювання, яка містить головний та хвостовий ультразвукові маяки, що розміщені на...
Пристрій для переміщення у підземному просторі
Номер патенту: 5725
Опубліковано: 15.03.2005
Автори: Кованько Володимир Володимирович, Древецький Володимир Володимирович, КУЦИН МИХАЙЛО МИКОЛАЙОВИЧ
МПК: E02F 5/18
Мітки: пристрій, просторі, переміщення, підземному
Формула / Реферат:
Пристрій для переміщення у підземному просторі, що містить конічну носову частину, зв'язану за допомогою пружини, яка охоплена герметичною гофрованою еластичною оболонкою, з хвостовою розпірною частиною у вигляді порожнистого перфорованого циліндра, також герметично охопленого гофрованою еластичною оболонкою і з'єднаного з системою енергопідведення, який відрізняється тим, що система енергопідведення являє собою зовнішнє високовольтне...
Попередній патент: Двоконтурний панельний теплообмінник з подвійними рідинними сорочками
Наступний патент: Ступінь турбіни
Випадковий патент: Спосіб очищення води від іонів цинку