Храповий механізм двосторонньої дії
Номер патенту: 92616
Опубліковано: 26.08.2014
Автори: Босюк Павло Володимирович, Пономаренко Сергій Володимирович, Дзюра Володимир Олексійович, Стефанів Володимир Михайлович, Гудь Віктор Зіновійович, Дячун Андрій Євгенович


Формула / Реферат
Храповий механізм двосторонньої дії, який виконано у вигляді храпового колеса, яке встановлене на валу з внутрішніми зубами з можливістю кругового періодичного провертання, зуби якого є у періодичній взаємодії з собачкою, яка встановлена на пальці з можливістю коливного руху, і зверху є у взаємодії з пружиною стиснення, який відрізняється тим, що механізм виконано у вигляді ексцентричного вала з ексцентриситетом, який встановлено на двох підшипниках, які закріплені в двох кришках з двох сторін, і вмонтований в циліндричний корпус, в якому всередині виконані радіальні пази з двох сторін в послідовному порядку, в які з можливістю осьового періодичного переміщення встановлені собачки, які в корпусі є у взаємодії одними кінцями з отворами шпильок з можливістю коливного руху, а другими кінцями, з середини собачки, є у взаємодії з штовхачами, які з другого кінця своїми циліндричними поверхнями є у взаємодії з ексцентричною поверхнею ексцентричного вала більшими поверхнями, а внутрішніми торцями вільних кінців собачки є у взаємодії з конусними пружинами стиснення, а сам механізм жорстко встановлено в стакан відомим способом, який жорстко закріплений до корпуса, а до правого кінця ексцентричного вала, який є поза межами стакана, жорстко встановлена рукоятка переключення положення механізму відомим способом, який має тільки два радіально протилежних положення, крім цього в стакан співвісно встановлено ступицю, до якої за допомогою шпильок встановлено два храпових колеса таким чином, що перше храпове колесо забезпечило обертання вала в одну сторону, а друге храпове колесо забезпечує обертання вала в протилежну сторону, а для фіксації положення використано стопорний механізм відомої конструкції.
Текст
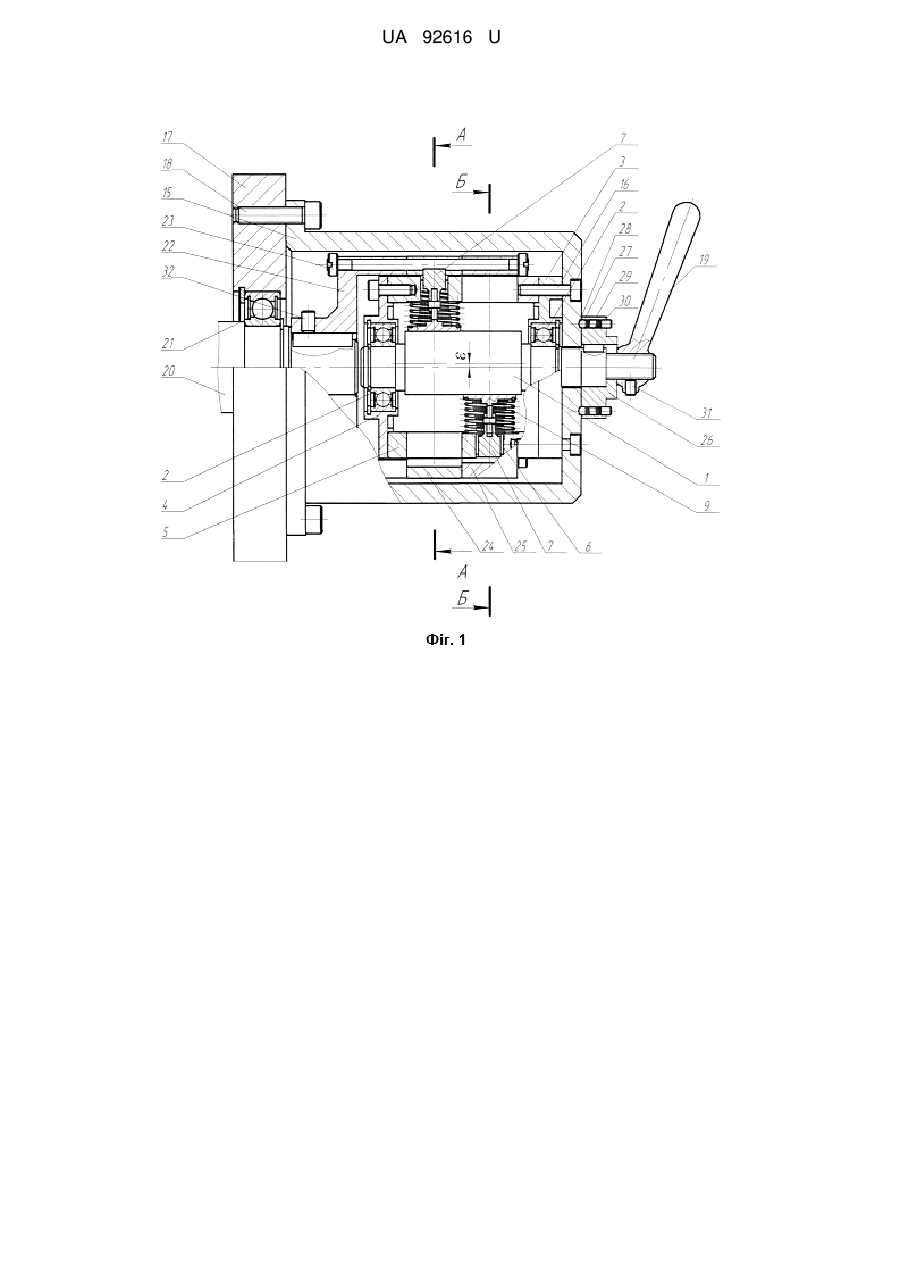
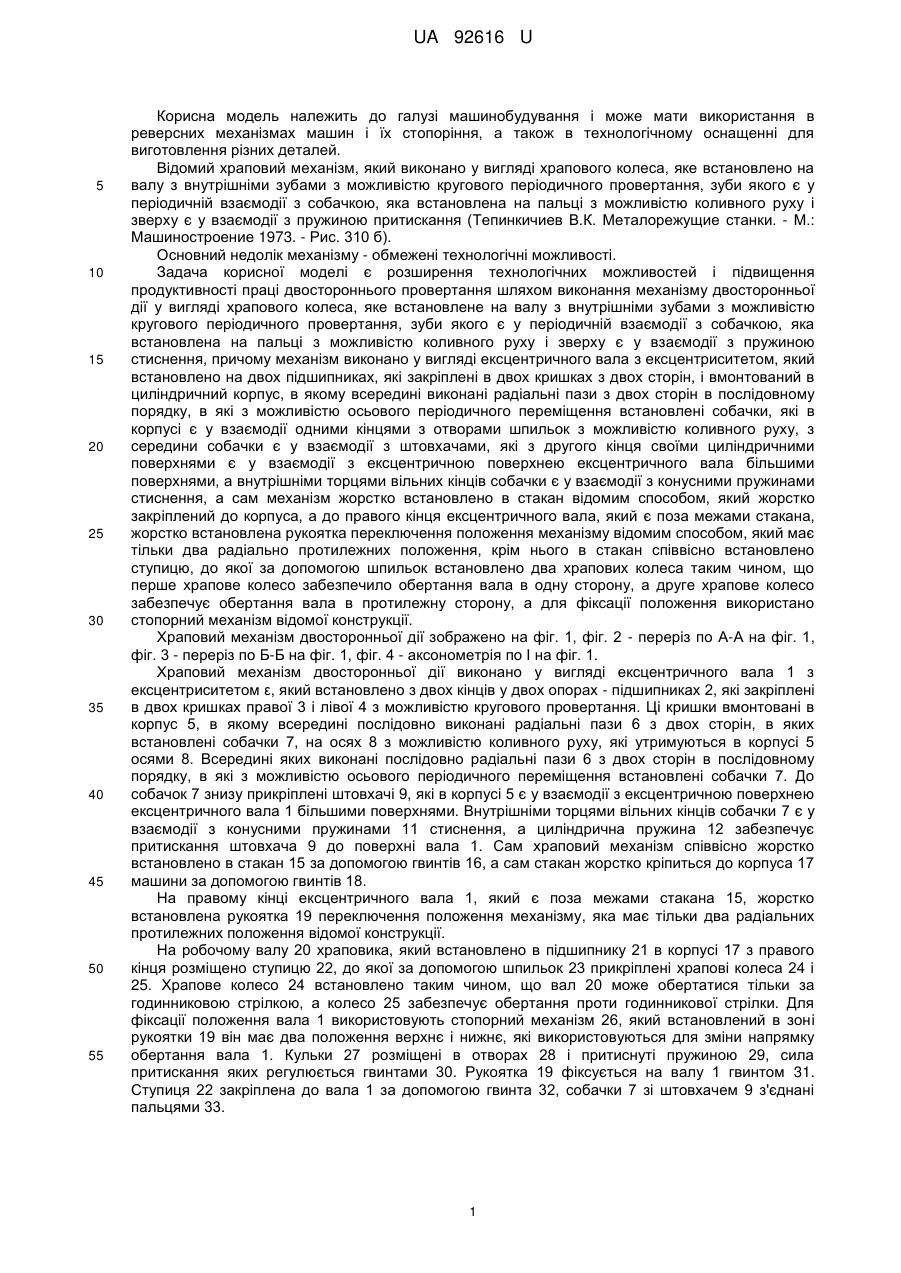
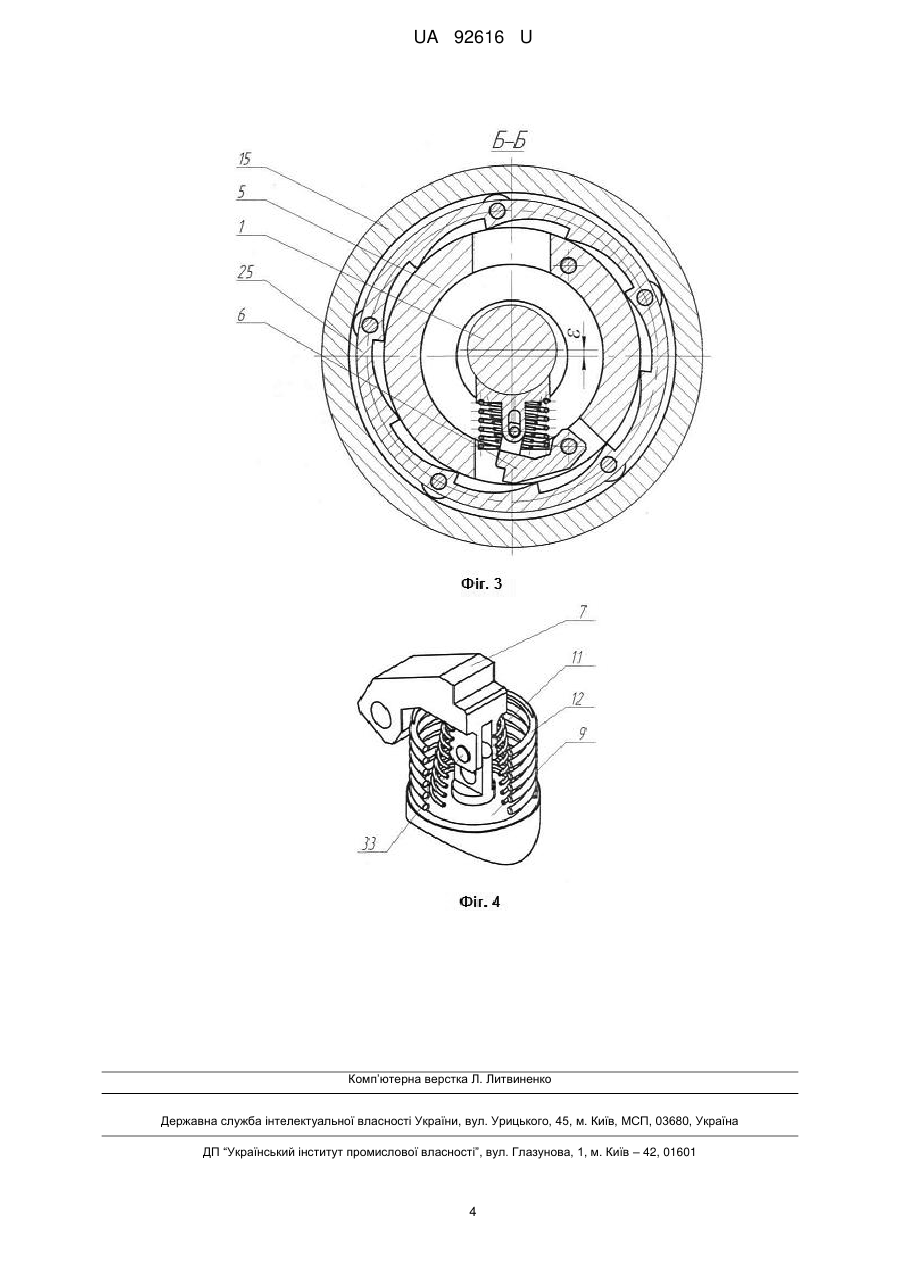
Реферат: Храповий механізм двосторонньої дії виконано у вигляді храпового колеса, яке встановлене на валу з внутрішніми зубами з можливістю кругового періодичного провертання, зуби якого є у періодичній взаємодії з собачкою, яка встановлена на пальці з можливістю коливного руху і зверху є у взаємодії з пружиною стиснення. Механізм виконано у вигляді ексцентричного вала з ексцентриситетом, який встановлено на двох підшипниках, які закріплені в двох кришках з двох сторін, і вмонтований в циліндричний корпус, в якому всередині виконані радіальні пази з двох сторін в послідовному порядку, в які з можливістю осьового періодичного переміщення встановлені собачки, які в корпусі є у взаємодії одними кінцями з отворами шпильок з можливістю коливного руху, з середини собачки є у взаємодії з штовхачами, які з другого кінця своїми циліндричними поверхнями є у взаємодії з ексцентричною поверхнею ексцентричного вала більшими поверхнями, а внутрішніми торцями вільних кінців собачки є у взаємодії з конусними пружинами стиснення, а сам механізм встановлено в стакан, який закріплений до корпуса, а до правого кінця ексцентричного вала, який є поза межами стакана, закріплена рукоятка переключення положення механізму, який має тільки два радіально протилежних положення. В стакан співвісно встановлено ступицю, до якої за допомогою шпильок встановлено два храпових колеса. Перше храпове колесо забезпечує обертання вала в одну сторону, а друге храпове колесо - в протилежну. UA 92616 U (12) UA 92616 U UA 92616 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі машинобудування і може мати використання в реверсних механізмах машин і їх стопоріння, а також в технологічному оснащенні для виготовлення різних деталей. Відомий храповий механізм, який виконано у вигляді храпового колеса, яке встановлено на валу з внутрішніми зубами з можливістю кругового періодичного провертання, зуби якого є у періодичній взаємодії з собачкою, яка встановлена на пальці з можливістю коливного руху і зверху є у взаємодії з пружиною притискання (Тепинкичиев В.К. Металорежущие станки. - М.: Машиностроение 1973. - Рис. 310 б). Основний недолік механізму - обмежені технологічні можливості. Задача корисної моделі є розширення технологічних можливостей і підвищення продуктивності праці двостороннього провертання шляхом виконання механізму двосторонньої дії у вигляді храпового колеса, яке встановлене на валу з внутрішніми зубами з можливістю кругового періодичного провертання, зуби якого є у періодичній взаємодії з собачкою, яка встановлена на пальці з можливістю коливного руху і зверху є у взаємодії з пружиною стиснення, причому механізм виконано у вигляді ексцентричного вала з ексцентриситетом, який встановлено на двох підшипниках, які закріплені в двох кришках з двох сторін, і вмонтований в циліндричний корпус, в якому всередині виконані радіальні пази з двох сторін в послідовному порядку, в які з можливістю осьового періодичного переміщення встановлені собачки, які в корпусі є у взаємодії одними кінцями з отворами шпильок з можливістю коливного руху, з середини собачки є у взаємодії з штовхачами, які з другого кінця своїми циліндричними поверхнями є у взаємодії з ексцентричною поверхнею ексцентричного вала більшими поверхнями, а внутрішніми торцями вільних кінців собачки є у взаємодії з конусними пружинами стиснення, а сам механізм жорстко встановлено в стакан відомим способом, який жорстко закріплений до корпуса, а до правого кінця ексцентричного вала, який є поза межами стакана, жорстко встановлена рукоятка переключення положення механізму відомим способом, який має тільки два радіально протилежних положення, крім нього в стакан співвісно встановлено ступицю, до якої за допомогою шпильок встановлено два храпових колеса таким чином, що перше храпове колесо забезпечило обертання вала в одну сторону, а друге храпове колесо забезпечує обертання вала в протилежну сторону, а для фіксації положення використано стопорний механізм відомої конструкції. Храповий механізм двосторонньої дії зображено на фіг. 1, фіг. 2 - переріз по А-А на фіг. 1, фіг. 3 - переріз по Б-Б на фіг. 1, фіг. 4 - аксонометрія по І на фіг. 1. Храповий механізм двосторонньої дії виконано у вигляді ексцентричного вала 1 з ексцентриситетом ε, який встановлено з двох кінців у двох опорах - підшипниках 2, які закріплені в двох кришках правої 3 і лівої 4 з можливістю кругового провертання. Ці кришки вмонтовані в корпус 5, в якому всередині послідовно виконані радіальні пази 6 з двох сторін, в яких встановлені собачки 7, на осях 8 з можливістю коливного руху, які утримуються в корпусі 5 осями 8. Всередині яких виконані послідовно радіальні пази 6 з двох сторін в послідовному порядку, в які з можливістю осьового періодичного переміщення встановлені собачки 7. До собачок 7 знизу прикріплені штовхачі 9, які в корпусі 5 є у взаємодії з ексцентричною поверхнею ексцентричного вала 1 більшими поверхнями. Внутрішніми торцями вільних кінців собачки 7 є y взаємодії з конусними пружинами 11 стиснення, а циліндрична пружина 12 забезпечує притискання штовхача 9 до поверхні вала 1. Сам храповий механізм співвісно жорстко встановлено в стакан 15 за допомогою гвинтів 16, а сам стакан жорстко кріпиться до корпуса 17 машини за допомогою гвинтів 18. На правому кінці ексцентричного вала 1, який є поза межами стакана 15, жорстко встановлена рукоятка 19 переключення положення механізму, яка має тільки два радіальних протилежних положення відомої конструкції. На робочому валу 20 храповика, який встановлено в підшипнику 21 в корпусі 17 з правого кінця розміщено ступицю 22, до якої за допомогою шпильок 23 прикріплені храпові колеса 24 і 25. Храпове колесо 24 встановлено таким чином, що вал 20 може обертатися тільки за годинниковою стрілкою, а колесо 25 забезпечує обертання проти годинникової стрілки. Для фіксації положення вала 1 використовують стопорний механізм 26, який встановлений в зоні рукоятки 19 він має два положення верхнє і нижнє, які використовуються для зміни напрямку обертання вала 1. Кульки 27 розміщені в отворах 28 і притиснуті пружиною 29, сила притискання яких регулюється гвинтами 30. Рукоятка 19 фіксується на валу 1 гвинтом 31. Ступиця 22 закріплена до вала 1 за допомогою гвинта 32, собачки 7 зі штовхачем 9 з'єднані пальцями 33. 1 UA 92616 U 5 10 Храповий механізм двосторонньої дії працює наступним чином. При положенні рукоятки 19, ексцентрична поверхня вала 1 (фіг. 1) знаходиться в крайньому верхньому положенні за рахунок розтискування конусної пружини 11. Штовхач 9 і прикріпленою до нього собачкою 7 теж знаходиться в крайньому верхньому положенні за рахунок розтискування конусної пружини 11. Циліндрична пружина 12 забезпечує притискання штовхача до поверхні вала 1. Вал 20 обертається за годинниковою стрілкою. При переміщенні рукоятки 19 на 180° вал 11 змінює своє положення ексцентрикової поверхні ексцентрикового вала 1 і вал повертається на 180°, верхній штовхач піднімається. Таким чином храпове колесо 24 виведене з зачеплення, а колесо 25 - входить в зачеплення з собачкою 7. Вал 20 обертається тільки проти годинникової стрілки. До переваг храпового механізму двосторонньої дії належать розширення технологічних можливостей і підвищення продуктивності праці. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 25 30 35 Храповий механізм двосторонньої дії, який виконано у вигляді храпового колеса, яке встановлене на валу з внутрішніми зубами з можливістю кругового періодичного провертання, зуби якого є у періодичній взаємодії з собачкою, яка встановлена на пальці з можливістю коливного руху, і зверху є у взаємодії з пружиною стиснення, який відрізняється тим, що механізм виконано у вигляді ексцентричного вала з ексцентриситетом, який встановлено на двох підшипниках, які закріплені в двох кришках з двох сторін, і вмонтований в циліндричний корпус, в якому всередині виконані радіальні пази з двох сторін в послідовному порядку, в які з можливістю осьового періодичного переміщення встановлені собачки, які в корпусі є у взаємодії одними кінцями з отворами шпильок з можливістю коливного руху, а другими кінцями, з середини собачки, є у взаємодії з штовхачами, які з другого кінця своїми циліндричними поверхнями є у взаємодії з ексцентричною поверхнею ексцентричного вала більшими поверхнями, а внутрішніми торцями вільних кінців собачки є у взаємодії з конусними пружинами стиснення, а сам механізм жорстко встановлено в стакан відомим способом, який жорстко закріплений до корпуса, а до правого кінця ексцентричного вала, який є поза межами стакана, жорстко встановлена рукоятка переключення положення механізму відомим способом, який має тільки два радіально протилежних положення, крім цього в стакан співвісно встановлено ступицю, до якої за допомогою шпильок встановлено два храпових колеса таким чином, що перше храпове колесо забезпечило обертання вала в одну сторону, а друге храпове колесо забезпечує обертання вала в протилежну сторону, а для фіксації положення використано стопорний механізм відомої конструкції. 2 UA 92616 U 3 UA 92616 U Комп’ютерна верстка Л. Литвиненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюStefaniv Volodymyr Mykhailovych, Ponomarenko Serhii Volodymyrovych, Dziura Volodymyr Oleksiiovych, Diachun Andrii Yevhenovych
Автори російськоюСтефанив Владимир Михайлович, Пономаренко Сергей Владимирович, Дзюра Владимир Алексеевич, Дячун Андрей Евгеньевич
МПК / Мітки
МПК: F16D 41/00
Мітки: двосторонньої, дії, механізм, храповий
Код посилання
<a href="https://ua.patents.su/6-92616-khrapovijj-mekhanizm-dvostoronno-di.html" target="_blank" rel="follow" title="База патентів України">Храповий механізм двосторонньої дії</a>
Безшумний храповий механізм
Номер патенту: 28365
Опубліковано: 10.12.2007
Автор: Колесник Олег Анатолійович
МПК: B66D 3/00
Мітки: храповий, безшумний, механізм
Формула / Реферат:
Безшумний храповий механізм, який містить корпус, на якому жорстко, з можливістю кругового обертання, встановлено на валу храпове колесо з зубами, які є у взаємодії з собачкою, яка жорстко закріплена до корпуса з можливістю провертання, осі обертання собачки і храпового колеса встановлені на вертикальній осі, який відрізняється тим, що в зонах підйому кожного з зубів храпового колеса виконані втоплені відкриті зверху круглі пази Т-подібної...
Храповий механізм
Номер патенту: 12945
Опубліковано: 28.02.1997
Автори: Пахомов Володимир Іванович, Малюта Олександр Дмитрович, Малюта Дмитро Іванович, Литвиненко Віктор Панасович, Литвиненко Юрій Вікторович, Блінков Генадій Васильович
МПК: F16H 29/00
Формула / Реферат:
(57) Храповой механизм, содержащий вал, установленные на нем два храповых колеса с одинаковым эвольвентным зубчатым профилем, жестко соединенные между собой и развернутые одно относительно другого на 180°, толкатель в виде собачки и фиксатор, установленные на ползуне и взаимодействующие с соответствующими храповыми колесами, профиль впадин между зубьями которых соответствует профилю фиксатора, отличающийся тем, что профиль зубьев храпового...
Гідравлічний мембранний виконавчий механізм двосторонньої дії
Номер патенту: 91889
Опубліковано: 25.07.2014
Автори: Цибрій Юрій Олександрович, Грабовський Георгій Геннадійович
МПК: F16H 43/00
Мітки: виконавчий, механізм, гідравлічний, дії, двосторонньої, мембранний
Формула / Реферат:
Виконавчий механізм гідравлічного натискного пристрою, що містить циліндр і плунжер з ущільненнями, розміщений в циліндрі, при цьому порожнина, що утворена циліндром і плунжером, підключена через датчик тиску і сервоклапан до системи гідроживлення, при цьому на зовнішній донній частині циліндра співвісно до нього виконано циліндричне заглиблення, накрите круглою гофрованою мембраною з жорстким центром, причому мембрана по зовнішньому контуру...
Муфта обгону двосторонньої дії
Номер патенту: 87248
Опубліковано: 27.01.2014
Автори: Дячун Андрій Євгенович, Босюк Павло Володимирович, Ляшук Олег Леонтійович, Дзюра Володимир Олексійович
МПК: F16D 41/00
Мітки: муфта, двосторонньої, дії, обгону
Формула / Реферат:
Муфта обгону двосторонньої дії, яка виконана у вигляді привідної зірочки, зовнішньої обойми, притискних і гальмівних елементів, привідного вала робочого органу, яка відрізняється тим, що на проміжний зовнішній діаметр обойми жорстко встановлено стакан, а між торцями поверхонь зовнішнього стакана і обойми встановлено розрізаний на три частини циліндричні гальмівні сектори з вмонтованими в їх торцях пружин розтиску, які з ними у взаємодії, а...
Виконавчий механізм двосторонньої дії з штурвалом (маховиком)
Номер патенту: 75508
Опубліковано: 10.12.2012
Автор: Єфремов Євген Юрійович
МПК: F15B 9/02, F15B 13/10, F15B 15/00
Мітки: штурвалом, двосторонньої, виконавчий, дії, маховиком, механізм
Формула / Реферат:
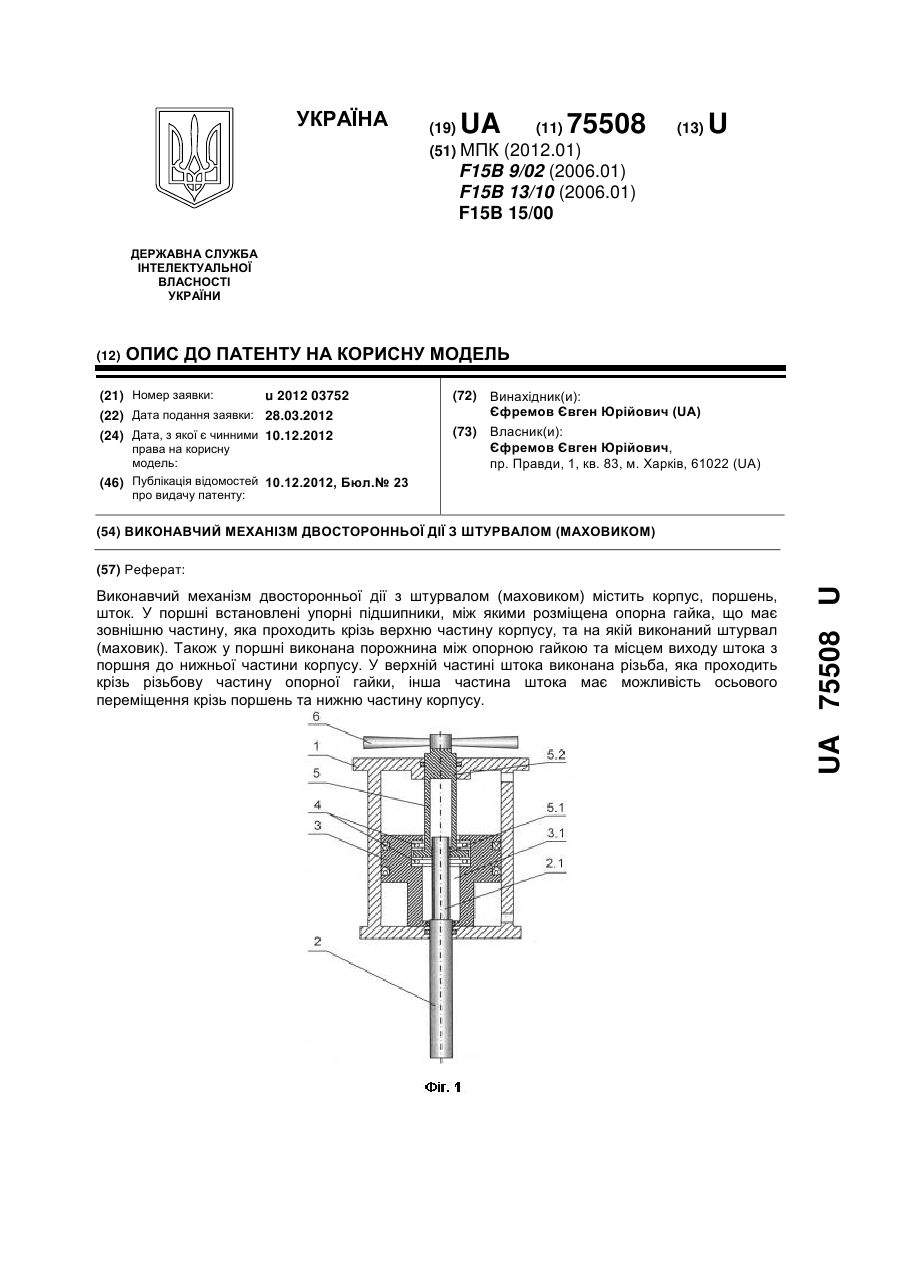
1. Виконавчий механізм двосторонньої дії з штурвалом (маховиком), що містить корпус, поршень, шток, який відрізняється тим, що у поршні встановлені упорні підшипники, між якими розміщена опорна гайка, що має зовнішню частину, яка проходить крізь верхню частину корпусу, та на якій виконаний штурвал (маховик), також у поршні виконана порожнина між опорною гайкою та місцем виходу штока з поршня до нижньої частини корпусу, у верхній частині...
Попередній патент: Агрегат для поверхневого внесення мульчі
Наступний патент: Пристрій для навивання гвинтових заготовок
Випадковий патент: Напіввологий корм для котів "мурчик"