Комбінований цифровий привод
Номер патенту: 97200
Опубліковано: 10.03.2015
Автори: Дідовець Вячеслав Євгенійович, Новік Микола Андрійович, Дурягін Андрій Іванович

Формула / Реферат
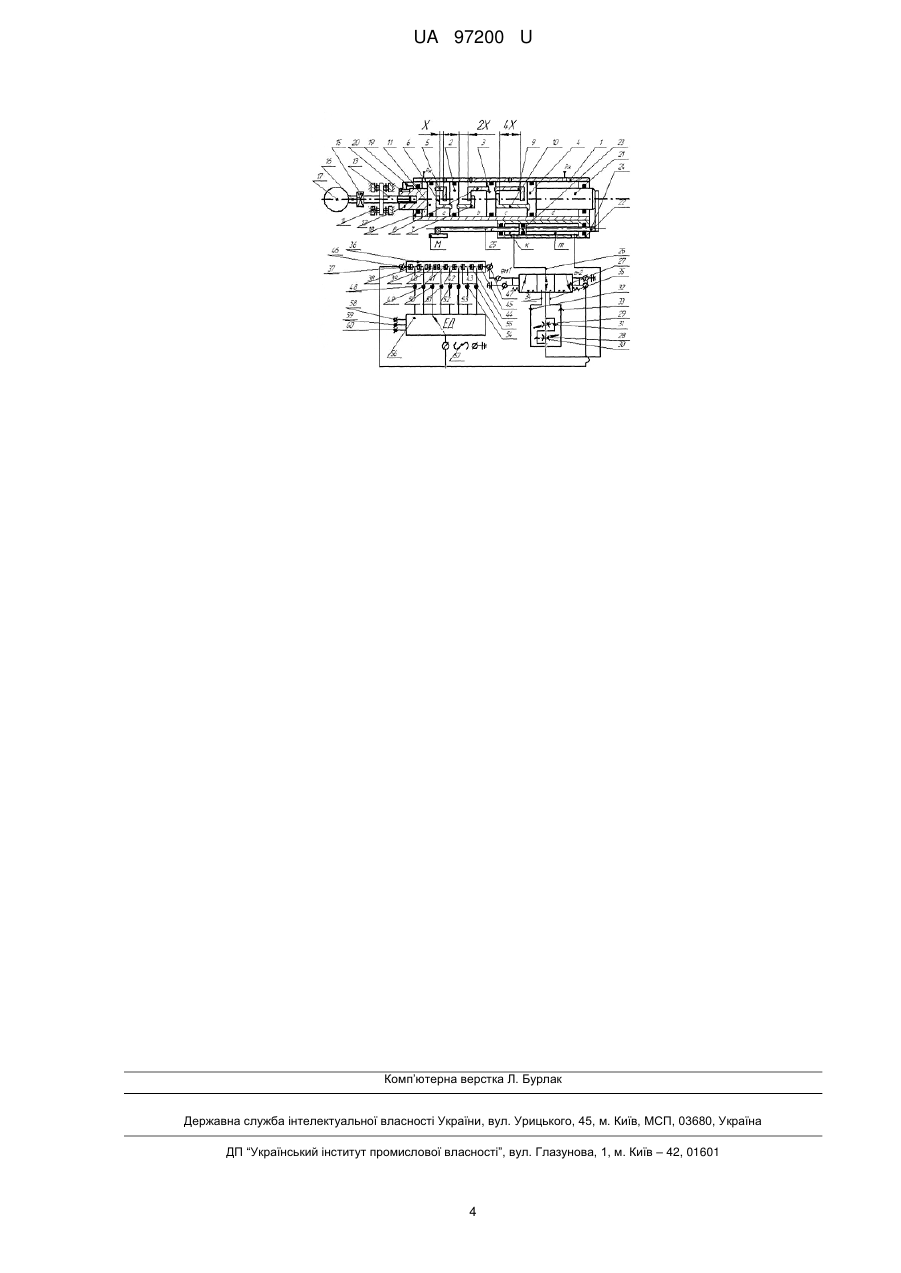
Комбінований цифровий привод, що містить цифровий пневматичний двигун, який виконаний у вигляді послідовно розміщених в циліндрі, з утворенням розрядних, компенсаційної штокової камер, розрядних і додаткового поршня, шток якого кінематично сполучений з вихідним валом, електричного крокового двигуна, датчик лінійного переміщення, у вигляді ланцюга послідовно сполучених замкнених контактів з кроком рівним дискретності цифрового двигуна і розмикаючого контакти магніту, при цьому вхідні контакти ланцюга контактів датчика сполучені через контакти електричного дишефратора з джерелом живлення, а вихідні контакти датчика сполучені з котушками електромагнітів трипозиційного гідравлічного розподільника, який відрізняється тим, що паралельно осі пневматичного цифрового двигуна закріплений гальмуючий гідравлічний циліндр з робочими камерами і двостороннім штоком, один кінець якого жорстко закріплений до вихідного штока пневматичного цифрового двигуна, а на іншому кінці, довжиною вдвічі більшою за дискретність цифрового двигуна, закріплений магнітний розмикач контактів датчика лінійного переміщення, виконаного у вигляді ланцюга герконів, при цьому одна із робочих камер гідроциліндра сполучена з вихідним каналом трипозиційного чотирилінійного гідророзподільника, а інша камера гідроциліндра сполучена через послідовно увімкнені дроселі зі зворотними клапанами з середнім вхідним каналом розподільника і через зворотно увімкнені зворотні клапани з двома іншими вхідними каналами.
Текст
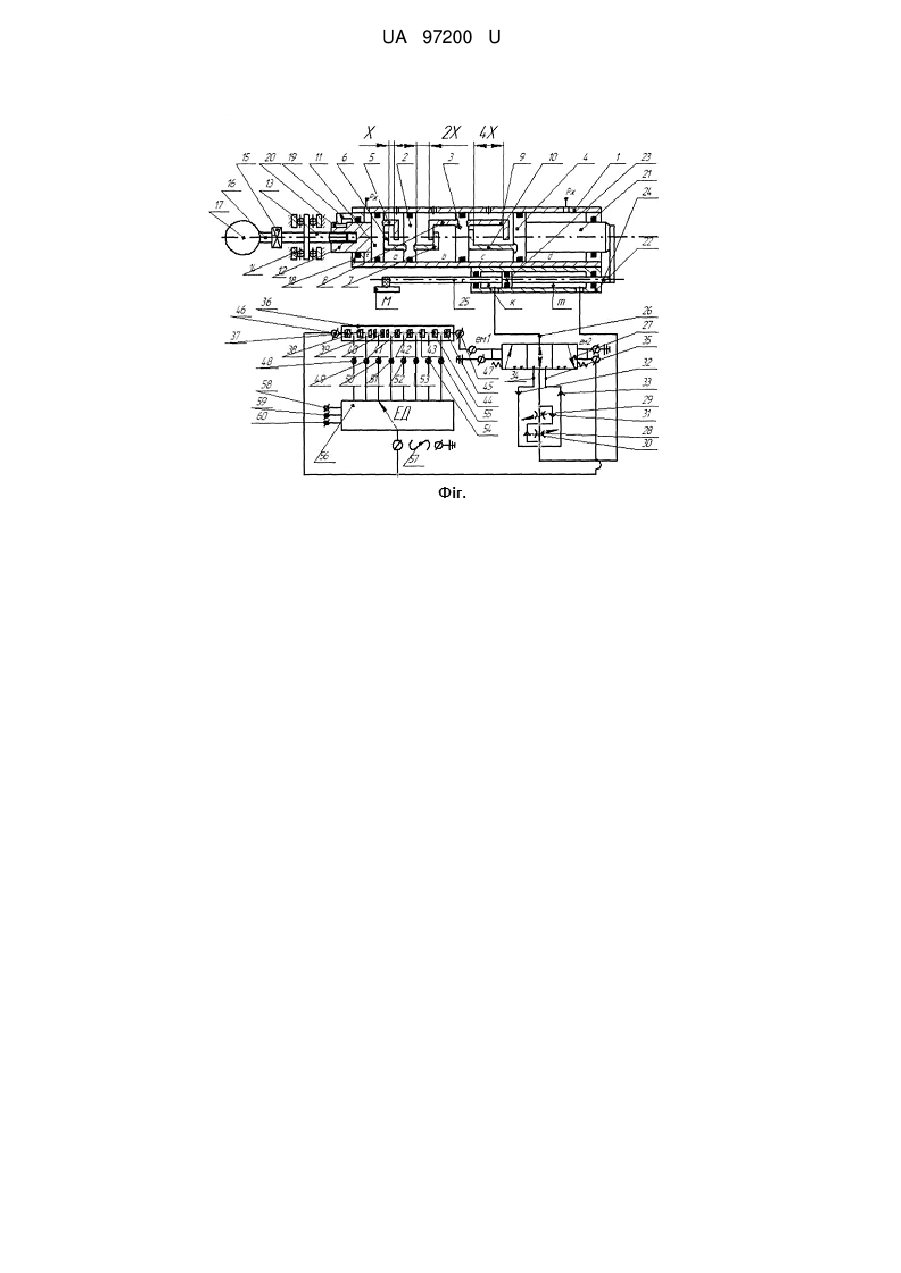
Реферат: UA 97200 U UA 97200 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до пристроїв автоматики і може бути використана у механізмах з дискретним позиціюванням робочих органів верстатів, промислових роботів, у зварювальному виробництві, при виконанні складальних та монтажних робіт. Відома конструкція гідравлічного цифрового приводу (див. Патент України на корисну модель №65553, МПК (2011.01) F15B 7/00, опубл. в Бюл. № 23,12.12.2011р.), що містить джерело гідравлічного живлення, багатопозиційний гідроциліндр з послідовно розміщеними у ньому з утворенням робочих і зворотної камер поршнями і штоком, розподільник, дросель, дешифратор, з вхідними і керуючими каналами і датчик лінійного переміщення. Недоліком такого приводу є те, що число позицій і величина переміщення вихідного штока визначається числом розрядних поршнів. Від числа поршнів залежить і осьовий габаритний розмір циліндра, що ускладнює технологію його виготовлення. Крім того, сила тертя такого приводу пропорційна числу розрядів (поршнів), що понижує механічний ККД. Так, наприклад, n десятирозрядний привод з дискретністю Х = 1 мм буде мати довжину циліндра L 3 Хmах 3(2 10 1)Х = 3(2 -1)=3069(мм), де Хmах - максимальна величина переміщення вихідного штока цифрового приводу; n - число розрядів (поршнів). При цьому максимальна сила тертя . визначається залежністю Fmax=F n, де F - сила тертя одного поршня. Така залежність сил тертя і габаритного розміру приводу від числа розрядів значно ускладнює конструкцію і обмежує область застосування. За найближчий аналог прийнята конструкція багатопозиційного приводу (див. Патент Україна на винахід № 90383, МПК (2009) F15B 7/00, Бюл. №8, 26.04.2010р.), що містить циліндр з вихідним штоком, передню і задню кришки, в якому послідовно розміщені поршні з обмежувачами відносного переміщення, що утворюють розрядні порожнини і порожнину зворотного руху поршнів з каналами живлення, додатковий поршень, який через отвір у задній кришці, виходить за її межі і кінематично з'єднаний з вихідними валом електричного крокового двигуна. Недоліком такого приводу є те, що в ньому при опрацюванні сигналів керування не забезпечується регулювання швидкості руху і гальмування вихідного штока при підході до заданої позиції. Крім того, при перемиканні комбінацій керуючих сигналів, коли до одних розрядних порожнин підводиться тиск живлення, а інші з'єднуются з атмосферою можуть виникати незапрограмовані рухи вихідного штока, так звані "викиди" і "провали". Все це значно понижує динамічні характеристики і знижує область застосування таких приводів. В основу корисної моделі поставлена задача поліпшення динамічних характеристик і розширення області застосування цифрових приводів. Рішення поставленої задачі досягається тим, що в комбінованому цифровому приводі, що містить цифровий пневматичний двигун, який виконаний у вигляді послідовно розміщених в циліндрі, з утворенням розрядних, компенсаційної штокової камер, розрядних і додаткового поршня, шток якого кінематично сполучений з вихідним валом, електричного крокового двигуна, датчик лінійного переміщення, який виконаний у вигляді ланцюга послідовно сполучених замкнених контактів з кроком, рівним дискретності цифрового двигуна і розмикаючого контакти магніту, при цьому вхідні контакти ланцюга контактів датчика сполучені через контакти електричного дешифратора з джерелом живлення, а вихідні контакти датчика сполучені з котушками електромагнітів гідравлічного розподільника. Новим є те, що паралельно осі пневматичного цифрового двигуна закріплений гідравлічний циліндр з робочими камерами і двостороннім штоком, один кінець якого жорстко закріплений до вихідного штока пневматичного цифрового двигуна, а на іншому кінці, довжиною вдвічі більшою за дискретність цифрового двигуна, закріплений магнітний розмикач контактів датчика лінійного переміщення, виконаного у вигляді ланцюга герконів, при цьому одна із робочих камер гідроциліндра сполучена з вихідним каналом трипозиційного чотирилінійного гідророзподільника, а інша камера гідроциліндра сполучена через послідовно увімкнені дроселі зі зворотними клапанами з середнім каналом розподільника і через зворотно увімкнені зворотні клапани з двома іншими вихідними каналами. Завдяки тому, що в структуру привода включено гальмуючий гідроциліндр з двостороннім штоком, одна із камер якого сполучена з вихідним каналом трипозиційного чотирилінійного гідравлічного розподільника з двостороннім електричним керуванням, а інша камера гідроциліндра сполучена через послідовно увімкнені дроселі зі зворотними клапанами з середнім вхідним каналом розподільника і через зворотно увімкнені зворотні клапани з двома іншими вхідними каналами досягається технічний результат - покращення динамічних характеристик і розширення області застосування Корисна модель пояснюється кресленням, де показана схема комбінованого цифрового приводу. 1 UA 97200 U 5 10 15 20 25 30 35 40 45 50 55 60 Комбінований цифровий привод складається із пневматичного цифрового двигуна, який виконаний у вигляді циліндра 1, в якому послідовно розміщені розрядні поршні 2, 3 і 4 з обмежувачами переміщення 5, 6, 7, 8, 9, і 10. Відносне переміщення розрядних поршнів дорівнює X, 2Х i 4Х. В циліндрі 1 розміщений додатковий поршень 11 зі штоком 12, в різьбовий отвір якого вгвинчений гвинт 13, який установлений на підшипниках 14 і через муфту 15 з'єднаний з вихідним валом 16 електричного крокового двигуна 17. На задній кришці 18 закріплена шпонка 19, кінець якої розміщений в пазу 20 штока 12. Поршень старшого розряду 4 жорстко з'єднаний з вихідним штоком 21. Розрядні поршні 2, 3, 4, додатковий поршень 11 і штоки 12 та 21 утворюють розрядні камери а, b, с і камери d і e. При цьому діаметри штоків 12 і 21 рівні, а в камери d і є постійно підводиться тиск живлення Рж. Паралельно циліндру 1 розміщений гальмувальний гідроциліндр 22, в якому розміщений поршень 23 зі штоками 24 і 25. Шток 24 жорстко з'єднаний з вихідним штоком 21. Камера к циліндра 22 сполучена з вихідним каналом 26 трипозиційного чотирилінійного гідравлічного розподільника 27 з двостороннім електричним керуванням. Камера m через послідовно увімкнені дроселі 28,29 і зворотні клапани 30 і 31 сполучена з середнім каналом розподільника 27 і через зворотні клапани 32 і 33 сполучена з вхідними каналами 34 і 35. Паралельно осі циліндра 22 розміщений датчик лінійного переміщення 36, який виконаний у вигляді ланцюга послідовно сполучених нормально замкнутих герметичних контактів (гекронів) 37, 38, 39, 40, 41, 42, 43, 44 і 45 з кроком X і розмикачем герконів магніту М, довжина якого l 2Х. Вихідний контакт 46 датчика 36 сполучений з котушкою електромагніта ем2 розподільника 27, а вихідний контакт 47 сполучений з котушкою електромагніта ем1 розподільника 27. Вхідні контакти герконів 37…45 сполучені, відповідно з вихідними контактами 48…55 дешифратора 56, вхідний контакт якого сполучений з контактом джерела електричного живлення 57. Вхідні контакти 58, 59 і 60 трирозрядного дешифратора 56 сполучені з керуючим пристроєм (на схемі керуючий пристрій не показаний). Принцип дії комбінованого цифрового приводу полягає в наступному. У вихідному положенні подається тиск живлення у камери e, b, d циліндра 1. На контакт 59 дешифратора 56 подано керуючий сигнал, при цьому вихідний канал джерела живлення 57 з'єднаний з вихідним контактом 50 і контактами герконів 39 і 40. Під дією магнітного зусилля магніту 46 контакти герконів 39 і 40 розімкнені, при цьому електромагніти ем1 і ем2 розподільника 27 знеструмлені і він знаходиться в середньому положенні. При перемиканні, наприклад, керуючих сигналів з комбінації з 010 на 100 (тиск живлення подається у камеру с, а камера b з'єднується з атмосферою) одночасно подається команда на перемикання дешифратора 56, при цьому подається напруга на контакт 60, а контакт 59 знеструмлюється. Внаслідок цього дешифратор 56 перемикається і напруга від джерела живлення 57 підводиться до контакту 53 і по ланцюгу замкнених герконів 43, 44 і 45 надходить на контакт 47 і електромагніт ем1, який перемикає розподільник праворуч (за кресленням), при цьому з'єднуються між собою канали 26 і 34. Під дією тиску в камері с поршень 3 рухається вліво, а поршень 4 з вихідним штоком 21 - вправо. При цьому рідина із камери m циліндра 22 через зворотний клапан 32 і розподільник 27 надходитьє в камеру к, що унеможливлює зворотний рух вихідного штока 21. При переміщенні штока 21 праворуч магніт М також переміщується праворуч і розмикає контакти герконів 42 і 43, при цьому знеструмлюється електромагніт ем1, розподільник 27 перемикається ліворуч в середнє положення і рідина із камери m витісняється в камеру к через дросель 28, зворотний клапан 31 і розподільник 27. Швидкість гальмування при цьому регулюється дроселем 28. Шлях гальмування визначається довжиною магніту М. Величина переміщення вихідного штока 21 при перемиканні комбінації керуючих сигналів з 010 на 100 дорівнює 4Х-2Х=2Х. При перемиканні комбінації керуючих сигналів з комбінації 100 на 000 (камера с з'єднується з атмосферою) і одночасно знеструмлюється контакт 60 дешифратора 56, при цьому напруга від джерела живлення 57 надходить на контакт 48 і далі через геркон 37, контакт 46 на електромагніт ем2, який перемикає розподільник 27 ліворуч. При цьому камера к гідроциліндра 22 сполучається з камерою m через розподільник 27 і зворотний клапан 33. Під дією тисків в штоковій камері d циліндра 1 поршень 4, шток 21, поршень 23 і магніт М переміщуються ліворуч. В кінці переміщення магнітом М розмикаються контакти геконів 37 і 38. Після розмикання геркона 37 знеструмлюється електромагніт ем2, розподільник 27 перемикається в середнє положення і рідина в кінці переміщень штока 21 витісняється із камери к в камеру т через дросель 29, яким і налаштовується швидкість гальмування штока 21 при його переміщенні ліворуч. При одночасному перемиканні комбінацій керуючих сигналів з 000 на 111 (тиск живлення одночасно подається в камери a, b і с цифрового двигуна) і опрацюванні р імпульсів електричним кроковим двигуном подається напруга на контакти 58, 59 і 60 дешифратора 56, який перемикається і напруга від джерела 57 надходить на контакт 55 і далі через геркон 45, контакт 47 на електромагніт ем1, який перемикає розподільник 22 праворуч. При цьому за рахунок обертання 2 UA 97200 U 5 10 15 гвинта 13 поршень 11 переміщується вправо, а під дією перепадів тиску розрядні поршні з вихідним штоком 21 теж переміщуються праворуч. Величина переміщення вихідного штока 21 при опрацюванні р імпульсів електричним кроковим двигуном і при перемиканні комбінації 000 Xn t p (2n 1)X 360 на 111 визначається по залежності , де t - крок гвинта 13; дискрета кута поворота електричного крокового двигуна; n - число розрядів (поршнів) пневматичного цифрового двигуна; X - дискрета цифрового двигуна. В кінці переміщення вихідного штока 21 магнітом М розмикаються геркони 44 і 45, знеструмлюється електромагніт ем1, розподільник 27 перемикається в середнє положення, при цьому рідина із камери т надходить в камеру к через дросель 28, яким регулюється швидкість гальмування вихідного штока 21 в кінці переміщення. Таким чином запропонований комбінований цифровий привод забезпечує швидке переміщення вихідного штока і гальмування його при опрацюванні будь-якої комбінації керуючих сигналів. При цьому при перемиканні комбінацій керуючих сигналів унеможливлюється незапрограмовані рухи вихідного штока. Мінімальна величина вихідного Xmin t 360 , якщо t=2; =1,8°; то Xmin = 0,01 мм штока визначається по залежності Максимальна величина переміщення вихідного штока X pmax Xmax t p (2n 1)X o xmin ,то 360 , якщо, наприклад, t=2; =1,8 ; n=3; Х=32мм; Xmax 256 мм N Число позицій вихідного штока Xmax 256 25600 Xmin 0,01 (позицій) 20 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 30 35 Комбінований цифровий привод, що містить цифровий пневматичний двигун, який виконаний у вигляді послідовно розміщених в циліндрі, з утворенням розрядних, компенсаційної штокової камер, розрядних і додаткового поршня, шток якого кінематично сполучений з вихідним валом, електричного крокового двигуна, датчик лінійного переміщення, у вигляді ланцюга послідовно сполучених замкнених контактів з кроком рівним дискретності цифрового двигуна і розмикаючого контакти магніту, при цьому вхідні контакти ланцюга контактів датчика сполучені через контакти електричного дишефратора з джерелом живлення, а вихідні контакти датчика сполучені з котушками електромагнітів трипозиційного гідравлічного розподільника, який відрізняється тим, що паралельно осі пневматичного цифрового двигуна закріплений гальмуючий гідравлічний циліндр з робочими камерами і двостороннім штоком, один кінець якого жорстко закріплений до вихідного штока пневматичного цифрового двигуна, а на іншому кінці, довжиною вдвічі більшою за дискретність цифрового двигуна, закріплений магнітний розмикач контактів датчика лінійного переміщення, виконаного у вигляді ланцюга герконів, при цьому одна із робочих камер гідроциліндра сполучена з вихідним каналом трипозиційного чотирилінійного гідророзподільника, а інша камера гідроциліндра сполучена через послідовно увімкнені дроселі зі зворотними клапанами з середнім вхідним каналом розподільника і через зворотно увімкнені зворотні клапани з двома іншими вхідними каналами. 3 UA 97200 U Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюNovik Mykola Andriiovych
Автори російськоюНовик Николай Андреевич
МПК / Мітки
МПК: F15B 7/00
Мітки: комбінований, привод, цифровий
Код посилання
<a href="https://ua.patents.su/6-97200-kombinovanijj-cifrovijj-privod.html" target="_blank" rel="follow" title="База патентів України">Комбінований цифровий привод</a>
Пневмогідравлічний цифровий привод
Номер патенту: 93441
Опубліковано: 10.02.2011
Автори: Новік Микола Андрійович, Кучерук Юрій Миколайович
МПК: F15B 11/02
Мітки: привод, пневмогідравлічний, цифровий
Формула / Реферат:
Пневмогідравлічний цифровий привод, що містить циліндр з розміщеним в ньому поршнем і вихідним штоком з утворенням гідравлічної поршневої та пневматичної штокової камер з каналами живлення, гідравлічні розрядні дозатори з вихідними гідравлічними каналами, сполученими з гідравлічною поршневою камерою і вхідними пневматичними каналами, що сполучені з вихідними каналами пневматичних двопозиційних розподільників, електричний дешифратор і датчик...
Цифровий привод поворотно-поступальної дії
Номер патенту: 66811
Опубліковано: 25.01.2012
Автори: Новік Микола Андрійович, Дідовець Вячеслав Євгенійович, Пузик Євген Олегович
МПК: F15B 9/03
Мітки: поворотно-поступальної, дії, цифровий, привод
Формула / Реферат:
Цифровий привод поворотно-поступальної дії, що містить циліндр з вихідним штоком з передньою і задньою кришками, в якому послідовно з утворенням розрядних порожнин з каналами живлення розміщені розрядні поршні з обмежувачами відносного переміщення і встановлений на задній кришці кроковий двигун, який відрізняється тим, що в осьових розточках задньої кришки і поршнів молодших розрядів герметично розміщений з можливістю повороту додатковий...
Цифровий гідравлічний привод
Номер патенту: 32252
Опубліковано: 12.05.2008
Автор: Новік Микола Андрійович
МПК: F15B 11/00
Мітки: привод, цифровий, гідравлічний
Формула / Реферат:
Цифровий гідравлічний привод, що містить гідроциліндр з робочими камерами, вихідний шток якого з’єднаний з розмикачем датчика зворотного зв’язку, цифровий гідродвигун внутрішньокрокового поділу, шток якого з’єднаний з корпусом датчика зворотного зв’язку, керуючі гідророзподільники, електричний дешифратор і програмний блок, який відрізняється тим, що датчик зворотного зв’язку виконаний у вигляді розміщених в корпусі з рівномірним кроком...
Комбінований цифровий привід
Номер патенту: 44656
Опубліковано: 12.10.2009
Автори: Новік Микола Андрійович, Кучерук Юрій Миколайович
МПК: F15B 11/00
Мітки: комбінований, привід, цифровий
Формула / Реферат:
1. Комбінований цифровий привід, що містить циліндр з послідовно розміщеними в ньому розрядними поршнями з обмежувачами відносного переміщення і вихідний шток з поршнем, які утворюють камеру зворотного руху і гідравлічну міжпоршневу камеру, яка сполучена з гідравлічними камерами розрядних гідравлічних дозаторів, який відрізняється тим, що в циліндрі закріплена додаткова перегородка з плунжером, який розміщений в осьовій розточці вихідного...
Цифровий привод
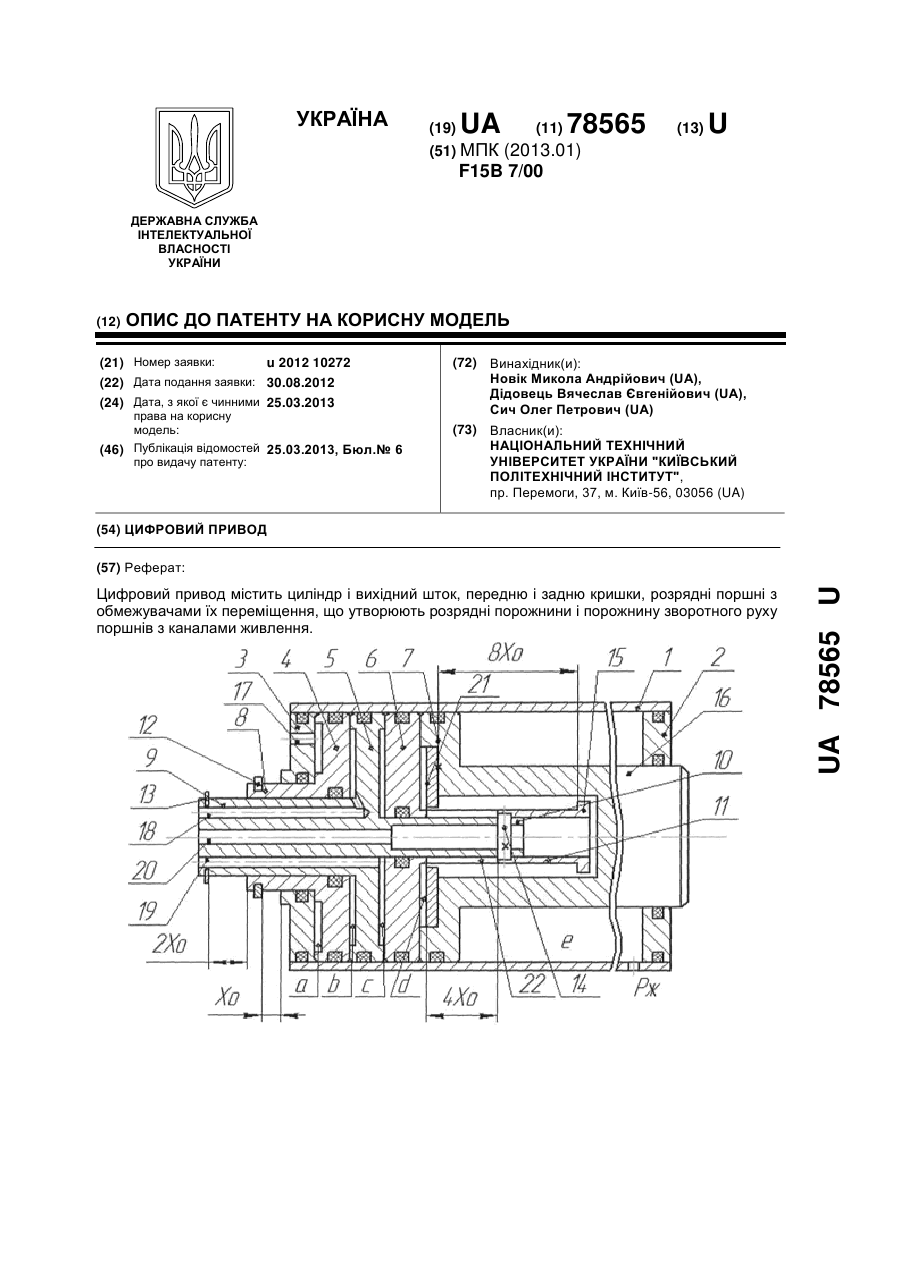
Номер патенту: 78565
Опубліковано: 25.03.2013
Автори: Дідовець Вячеслав Євгенійович, Сич Олег Петрович, Новік Микола Андрійович
МПК: F15B 7/00
Формула / Реферат:
Цифровий привод, що містить циліндр і вихідний шток, передню і задню кришки, між якими розміщені послідовно з обмежувачами їх переміщення розрядні поршні, що утворюють розрядні порожнини і порожнину зворотного руху поршнів з каналами живлення, який відрізняється тим, що обмежувачі переміщення розрядних поршнів виконані у вигляді циліндричних хвостовиків з упорами, при цьому хвостовик поршня першого розряду виходить через циліндричний осьовий...
Попередній патент: Муфта
Наступний патент: Установка для пробивання отворів лазерним променем
Випадковий патент: Вертикальний штампувальний прес